- Title: OpenSocInt A Multi-modal Training Environment for Human-Aware Social Navigation
- ArXiv ID: 2601.01939
- Date: 2026-01-05
- Authors: Victor Sanchez, Chris Reinke, Ahamed Mohamed, Xavier Alameda-Pineda
📝 Abstract
In this paper, we introduce OpenSocInt, an open-source software package providing a simulator for multi-modal social interactions and a modular architecture to train social agents. We described the software package and showcased its interest via an experimental protocol based on the task of social navigation. Our framework allows for exploring the use of different perceptual features, their encoding and fusion, as well as the use of different agents. The software is already publicly available under GPL at https://gitlab.inria.fr/robotlearn/OpenSocInt/.
💡 Summary & Analysis
1. **Open-Source Framework:** The paper introduces OpenSocInt, an open-source framework that allows researchers to simulate social interactions and process various sensor data. This is akin to a toolkit with multiple tools, enabling users to pick what they need.
2. **Support for Diverse Learning Models:** OpenSocInt supports different reinforcement learning algorithms, allowing agents to understand and learn from complex social interactions. It’s like mixing various ingredients to create a delicious dish, where each reinforcement learning algorithm acts as a unique spice.
3. **Flexible Data Representation:** The framework provides multiple input modalities for the agent to use, enabling it to adapt its information usage based on the situation. This is similar to having different types of maps while traveling, allowing one to select the most useful information according to their needs.
📄 Full Paper Content (ArXiv Source)
# Introduction
The computational study of social interactions is an important field of
research with many applications such as video games, virtual reality,
and social robotics. The field is inherently multi-modal as, in
practice, several sensors are available to describe the scene around the
agent(s). Examples of such sensors are cameras, LIDARs, ultrasound, and
microphones. OpenSocInt provides a
framework for simulating social situations and various sensor percepts,
with the main aim of training agents for social interaction. The
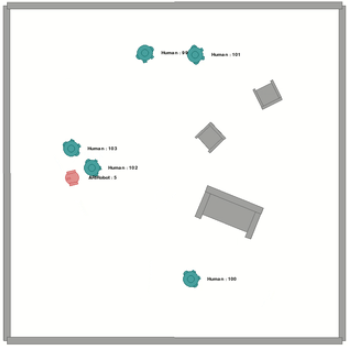
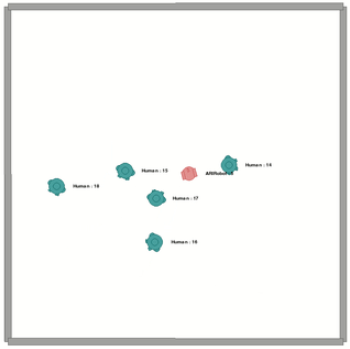
prominent example is human-aware social navigation, and two examples of
this environment (with or without obstacles/furniture) are provided in
Figure 1.
Two examples of the environment simulation with OpenSocInt: (left) without and (right) with
obstacles.
Modular Architecture
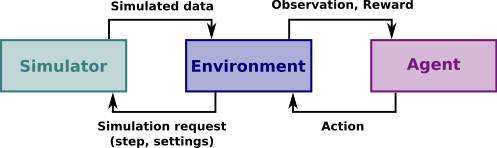
OpenSocInt is structured in three
different modules, namely: the simulator, the agent, and the
environment, see
Figure 2. The simulator keeps track of
the current status of the scene being simulated. The agent takes actions
and receives the associated rewards and the new observations that will
be used to take further action. The environment acts as a mediator
between the agent and the environment by communication to the
environment the actions taken, and extracting observations from the new
environment state.
/>
OpenSocInt’s modular
architecture: the agent takes actions and gets observations and rewards
from the environment. Following these actions, the environment queries
the simulator, and computes the reward and the observations from the
simulated data.
The Simulator Module
This module is responsible for keeping track of the state of the scene,
updating it with the information about the agent provided by the
environment, and providing to the environment the updated state.
Internally, the simulator knows the position of the agent, of the
(dynamic and static) obstacles, see
Figure 1, and the position (angle and
distance) of the agent’s goal relative to the agent.
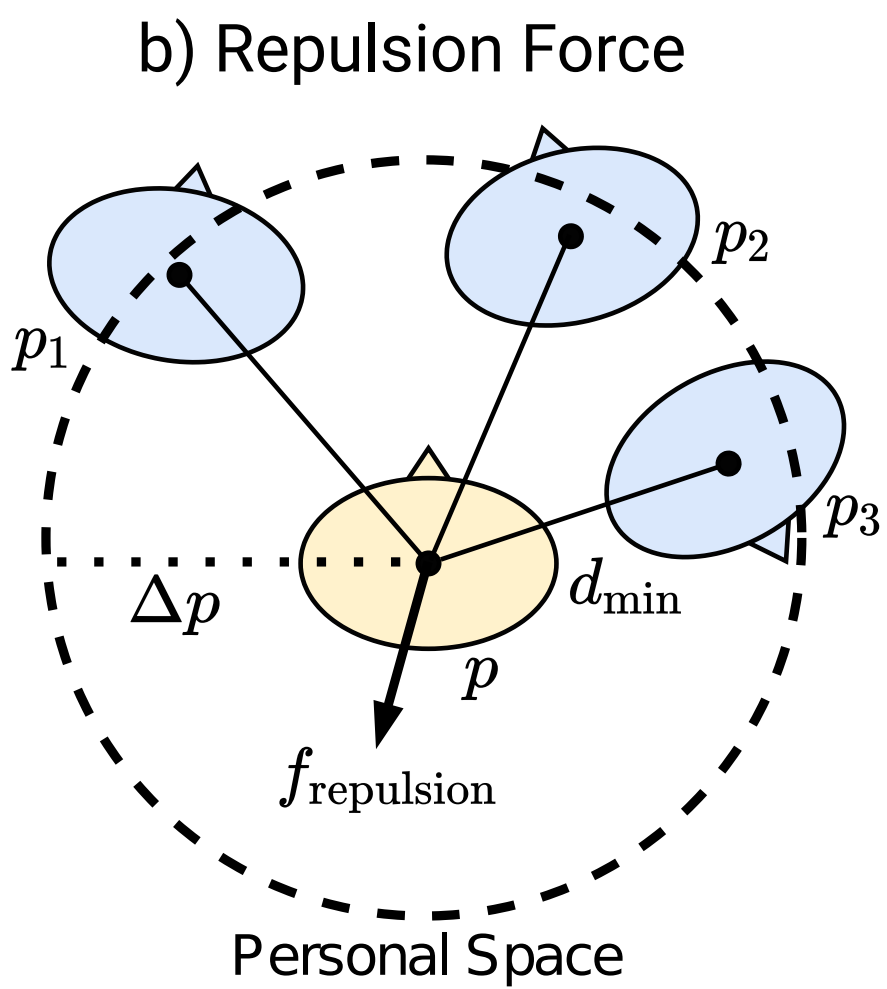
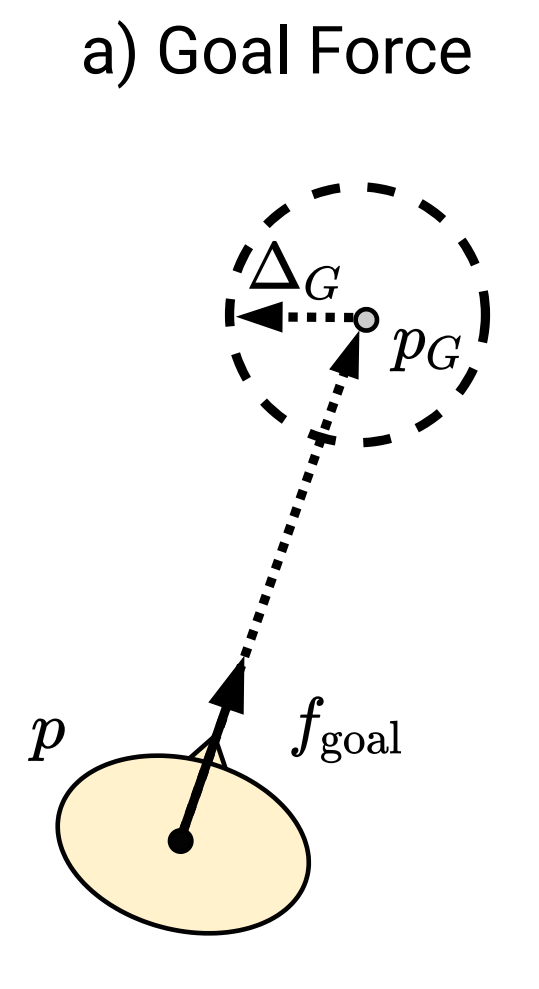
Diagram of the goal force (left) and social/repulsion force
(right) used in the simulator module to update the state of the
simulation.
In order to compute the updated state, the simulator needs to compute
the next position of the agent (given the action) and the next position
of the dynamic obstacles (persons). We hypothesise that each person has
a goal, and the next position of each person will be computed using a
weighted sum of a social force model and a goal force model. While
for the later, the force is oriented toward the goal and proportional to
the distance (with maximum unitary value), the later is based on a
repulsion force to avoid humans to be too close to each other, see
Figure 3. This repulsion force does not take
the agent into account as preliminary experiments showed that the agent
will learn to exploit this repulsion to push humans away and go directly
to its goal.
The Environment Module
This module aims to facilitate the communication between the agent and
the simulator. On the one hand, the actions taken by the agent are sent
to the environment and then the simulator so as to step onto the
simulation time. In the simulator, the internal state will be updated
according to the action received, and the new state will be sent to the
environment module, which will then translate the new state into one or
several sensing modalities.
The first sensing modality encloses the coordinates (either in Cartesian
or Polar format) of the nearest obstacle (whether it is static or
dynamic). This sensing modality has the advantage of being very simple,
and the disadvantage of missing a lot of information. A second approach
is to convert the state onto LIDAR data around the robot, in the form of
a Raycast. The data dimensionality is fixed, and depends on the desired
accuracy. For example, a distance measurement at every degree around the
robot implies a vector of 360 values. The format is slightly more
complex than the previous one, but encodes much more information.
Occluded obstacles, however, are not represented when using LIDAR. A
third approach is to use a local egocentric occupancy grid (LEOG) that
represents the occupancy of the space around a robot. Each element of
the grid is either one if that element is occupied and zero otherwise.
The size of this representation depends on the map size and resolution.
For example, a $`6~\textrm{m}\times 6`$ m grid with a precision of
$`0.1`$ m per pixel yields $`60\times 60`$ image. The environment can
convert the simulation state into one or more of these representations
depending on the input taken by the agent. Other representations can be
implemented and added to the package very easily.
In addition to the representation of the simulation state, the
environment also forwards the relative position of the agent’s goal and
the reward computed using the simulator’s data.
/>
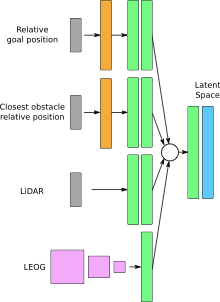
Architectures for processing the various input modalities.
Convolutional layers (for LEOG) are in pink, fully connected layers in
green, and radial basis fuction layers in orange. The circle stands for
the concatenation-based multi-modal fusion. The various implemented
agents always build from the latent space, shown in blue.
The Agent Module
The agent receives the observations (representation of the simulation
state, as one or multiple modalities), the relative goal’s position, and
the obtained reward.
At training time, the observations are forwarded through the network,
that outputs the action taken, as well as the other values needed for
training. These values will depend on the deep RL paradigm being used
(see below). The loss is computed and back-propagated through the
network. The action chosen is then forwarded to the environment, thus
closing the loop in
Figure 2.
The multi-modal agent architecture inputting the various modalities is
shown in
Figure 4. A latent space (blue
box) is learn from one or more modalities plus the agent’s goal. The
local egocentric occupancy grid (LEOG) is processed by a few
convolutional layers (in pink), then flattened and transformed via one
or more fully connected layers (in green). The LIDAR (RayCast) and the
other two modalities are transformed via one or more fully connected
layers. In order to facilitate learning from very low-dimensional inputs
(e.g. the relative position of the goal and closest obstacle) a radial
basis function layer (in orange) is used to increase the
representation’s dimensionality before the fully connected layers. The
one or multiple modalities are concatenated into the latent
representation, that is then used by the various reinforcement learning
agents implemented.
All the implemented agents exploit the same latent representation (blue
in the image) and cover the following deep RL paradigms: twin-delayed
deep deterministic policy gradient (TD3) , deep deterministic policy
gradient (DDPG) , advantage actor-critic (A2C) and soft-actor critic
(SAC) .
Repository
The code repository is publicly available,1, and has the
corresponding agent and env folders, as well as a few other utility
folders for creating datasets and training recipies. The simulator is an
automatically linked external module that is kept in a different
repository so that users interested only in the simulator do not need to
download the entire OpenSocInt package. A
detailed explanation of the scripts, options, and visualisation tools
can be found in the README.md file.
Experimental Protocol
In order to validate the use of the proposed software package, we have
conducted a series of experiments training reinforcement learning agents
via the environment and simulator described above. We describe here the
key information of our experimental protocol.
Reward functions
During training, the agent has to learn the optimal behavior. To that
aim, the agent interacts with the environment by taking actions during a
given number of episodes. An episode terminates under on of the
following three conditions: reaching the goal, colliding with an
object/human, or the agent reaches the maximum number of steps without
collision or reaching the goal (the episode state is “Truncated”). The
agent’s optimal behaviour is reached by maximising the cumulative
reward. The reward function in intermediate steps (before reaching the
goal/colliding) writes as follows:
where $`r_{\textsc{step}}(t) =-\omega_{step}`$ penalises taking
unnecessary steps, and $`r_{\textsc{goal-d}}`$ and
$`r_{\textsc{social}}`$ correspond to the goal direction and social
repulsion forces shown in
Figure 3, multiplied by coefficients
$`\omega_{\textsc{goal-d}}`$ and $`\omega_{\textsc{social}}`$,
respectively. When reaching the goal/colliding (end of the episode), the
reward writes as follows:
where $`\gamma_{\textsc{goal-r}}(t)=1`$ if the goal is reached and 0
otherwise and $`\gamma_{\textsc{coll}}(t)`$ is defined analogously for
the collision. The values for the weigthing coefficients can of course
be parametrised in our package. In the experiments reported below, we
use the following numbers: $`\omega_{\textsc{goal-r}}=500`$,
$`\omega_{\textsc{coll}}=-500`$, $`\omega_{step}=-5`$,
$`\omega_{\textsc{goal-d}}=10`$, and $`\omega_{\textsc{social}}=-100`$.
Metrics
We report the evolution of three metrics along the training. First, the
percentage of episodes that end with the agent reaching the goal.
Second, the percentage of episodes that end with the agent colliding
either with a static or with a dynamic obstacle. Third, the percentage
of episodes that run until the maximum number of steps without reaching
the goal or colliding, see the previous section. Importantly, these
metrics are computed in a set of episodes that does not belong to the
training set, and is therefore never part of the replay buffer. More
precisely, every 50 training episodes, the model is evaluated on 20 test
episodes, until reaching 700 training episodes (or 280 test episodes).
This is done 5 times per configuration. The mean and standard deviation
of each metric over a sliding window of 10 test episodes is the
reported.
Results
The impact of the LEOG encoding
While the RayCast and the closest obstacle feature are relatively
compact, LEOG are raw features that can be compressed. To this aim, we
proposed to encode them via a convolutional neural network. However, the
importance of the LEOG encoding pre-training has to be assessed. In
order to pre-train the encoder, we simply let the agent wonder around
the environment to collect data using a random policy. If
OpenSocInt is to be interfaced with a
custom simulator that is computationally to heavy to pre-train an
encoder on-line, our code provides also the option of collecting a
dataset in advance/use an existing dataset to pre-train the encoder.
Obviously key training parameters (e.g. batch size) can be parametrised,
and we also provide tools for visualising the training progress. In
Figure [fig:encoders], we report both metrics
in three different situations, namely: a pre-trained encoder, a
pre-trained encoder that is fine-tuned when training the RL agent, an
untrained encoder that is trained from scratch together with the RL
agent.
The results clearly indicate that, while all three LEOG encoder training
strategies converge to an excellent performance, there are difference in
terms of standard deviation during training. Indeed, learning the LEOG
encoder from scratch at the same time as the agent, results in higher
standard deviations during training time. In addition, we also observe
the natural superiority of the pre-trained and frozen LEOG encoder at
the beginning of the agent training: the inductive bias of the encoder
pre-training helps considerably.
Mean and standard deviation of the success, collision, and
truncated rates of the different settings evaluated. (a) Different LEOG
encoding strategies: pre-trained frozen, pre-trained and fine-tuned,
trained from scratch. (b) Different features: LEOG, RayCast and Closest
Object. (c) Feature fusion: LEOG, RayCast, and LEOG+RayCast. (d) Various
RL paradigms: SAC, TD3, DDPG, and A2C.
The impact of the modalities
We first analyse the impact of the features used as network input. As a
reminder, there are three options: the polar coordinates relative to the
agent of the closest obstacle, the LIDAR or RayCast information, and the
local egocentric occupancy grid (LEOG).
Figure [fig:features], reports the metrics
when inputting these modalities.
We can observe that, while asymptotically old modalities converge to a
similar performance, there are notable differences specially at the
first stages of training. Indeed, the superiority of simpler features
such as RayCast and Closest Object is natural given that they are easier
to exploit. However, the LEOG features provide the same mean performance
with small standard deviation (thus more reliability) when trained with
more data.
The impact of fusing modalities
In addition of comparing the various features in the previous section,
we have also considered the interest of merging different feature
modalities, so as to evaluate the interest of multi-modal agents. To
this aim, Figure [fig:fusion] presents the results
comparing the fusion of RayCast and LEOG modalities to having the two
modalities independently.
While at a first glance one could think that the fusion does not bring a
strong improvement, a more detailed analysis points to the opposite
direction. First of all, during the first half of the training, the
fusion of the two modalities exhibits better average performance than
both modalities independently. In addition, the method exploiting the
two modalities has considerably small standard deviation than the
mono-modal models. Specifically, we observe sporadic increases of
truncated episodes for both mono-modal methods at different points of
the training, while this phenomenon is not observed in the multi-modal
case. Overall, the main benefit of the mutli-modal strategy seems to be
a more effective learning in the low-data regime, and a more stable
training.
The impact of the RL paradigm
As mentioned above, the
OpenSocInt software package is a
simulation environment designed for reinforcement learning. In this
regard, we have implemented and compared several reinforcement learning
paradigms when input the same modality (LEOG).
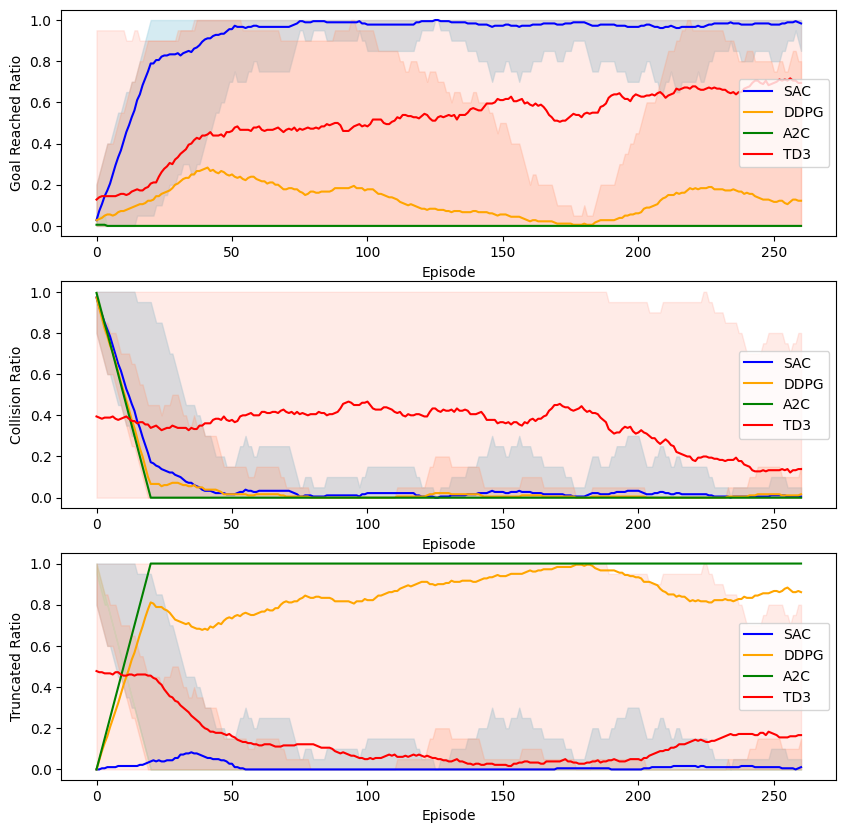
Figure [fig:agents] reports the results of the
four RL paradigms evaluated, namely SAC, TD3, DDPG, and A2C. What is
most interesting with these last results is that the different RL
paradigms exhibit very different behaviours. First, A2C could be
considered as learning a “people-avoiding” policy, regardless of the
goal. Indeed, the truncated ratio grows to 1, while the goal reaching
and collision quickly converge to 0. Second, the DDPG exhibits a similar
learned behaviour, with the difference that in some situations it
manages to reach the goal. Next inline would be TD3, that exhibits an
almost random behaviour, with many episodes stopped with a collision or
truncated, while the majority by reaching the goal. Finally, SAC
exhibits the best behaviour, rapidly decreasing the number of collisions
with almost no truncated episodes, thus reaching the goal in the most
cases since the first training stages.
Conclusions
In this paper we introduce OpenSocInt, an
open-source software package dedicated to training RL-based autonomous
agents for multi-modal social interaction. We described its modular
architecture and showcase its interest by conducting and reporting a
series of experiments in the social navigation application. Different
agents and features (as well as their encoding and fusion), are
evaluating, thus putting forward the versatility and interest of
OpenSocInt. Future development directions
will consist in enriching the simulator with social cues, and training
agents for other tasks.
Acknowledgements
We would like to warmly thank Alex Auternaud, Gaëtan Lepage, and Anand
Ballou for the valuable discussions and feedback provided during the
development and evaluation of the
OpenSocInt software package.
The copyright of this content belongs to the respective researchers. We deeply appreciate their hard work and contribution to the advancement of human civilization.