Agentic Revolution Building ROME in the ALE Ecosystem
📝 Original Paper Info
- Title: Let It Flow Agentic Crafting on Rock and Roll, Building the ROME Model within an Open Agentic Learning Ecosystem- ArXiv ID: 2512.24873
- Date: 2025-12-31
- Authors: Weixun Wang, XiaoXiao Xu, Wanhe An, Fangwen Dai, Wei Gao, Yancheng He, Ju Huang, Qiang Ji, Hanqi Jin, Xiaoyang Li, Yang Li, Zhongwen Li, Shirong Lin, Jiashun Liu, Zenan Liu, Tao Luo, Dilxat Muhtar, Yuanbin Qu, Jiaqiang Shi, Qinghui Sun, Yingshui Tan, Hao Tang, Runze Wang, Yi Wang, Zhaoguo Wang, Yanan Wu, Shaopan Xiong, Binchen Xu, Xander Xu, Yuchi Xu, Qipeng Zhang, Xixia Zhang, Haizhou Zhao, Jie Zhao, Shuaibing Zhao, Baihui Zheng, Jianhui Zheng, Suhang Zheng, Yanni Zhu, Mengze Cai, Kerui Cao, Xitong Chen, Yue Dai, Lifan Du, Tao Feng, Tao He, Jin Hu, Yijie Hu, Ziyu Jiang, Cheng Li, Xiang Li, Jing Liang, Xin Lin, Chonghuan Liu, ZhenDong Liu, Zhiqiang Lv, Haodong Mi, Yanhu Mo, Junjia Ni, Shixin Pei, Jingyu Shen, XiaoShuai Song, Cecilia Wang, Chaofan Wang, Kangyu Wang, Pei Wang, Tao Wang, Wei Wang, Ke Xiao, Mingyu Xu, Tiange Xu, Nan Ya, Siran Yang, Jianan Ye, Yaxing Zang, Duo Zhang, Junbo Zhang, Boren Zheng, Wanxi Deng, Ling Pan, Lin Qu, Wenbo Su, Jiamang Wang, Wei Wang, Hu Wei, Minggang Wu, Cheng Yu, Bing Zhao, Zhicheng Zheng, Bo Zheng
📝 Abstract
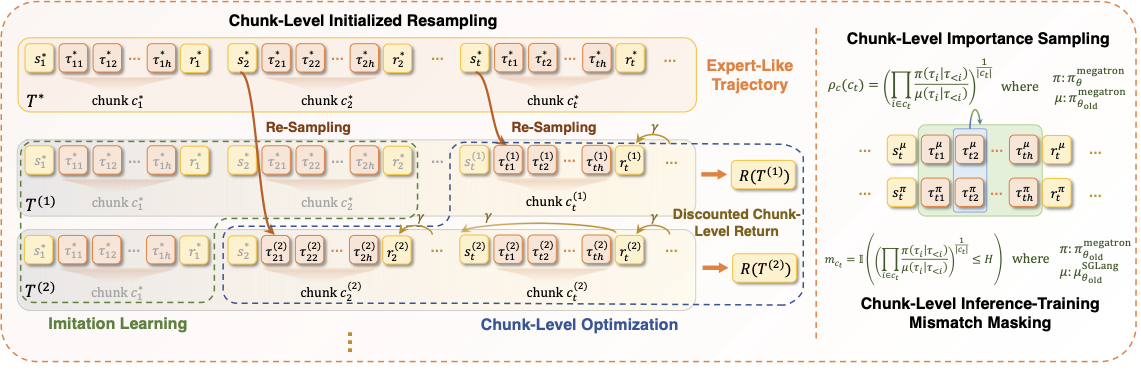
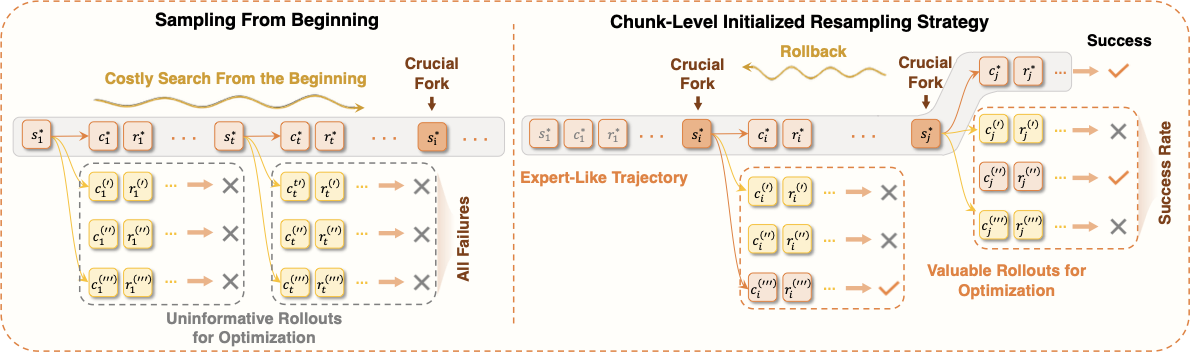
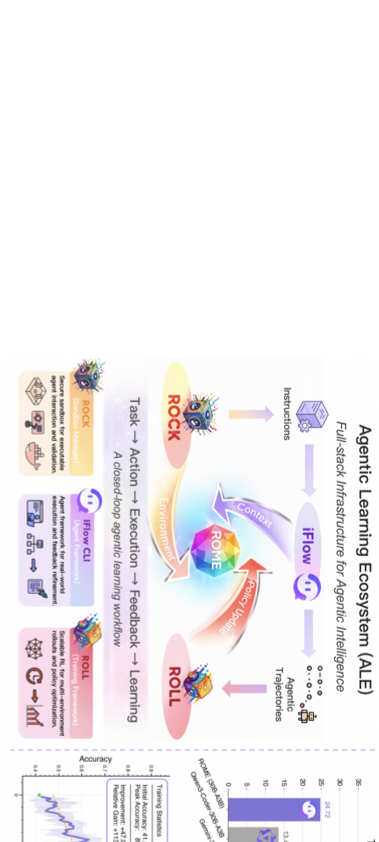
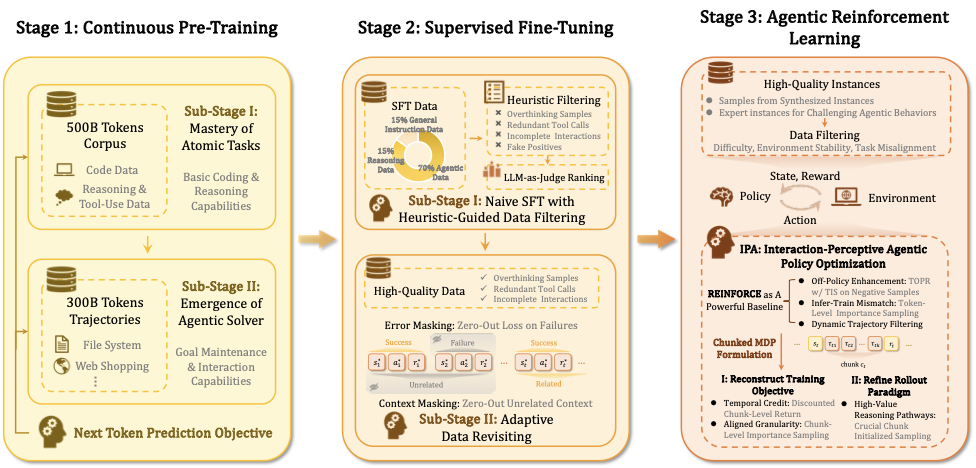
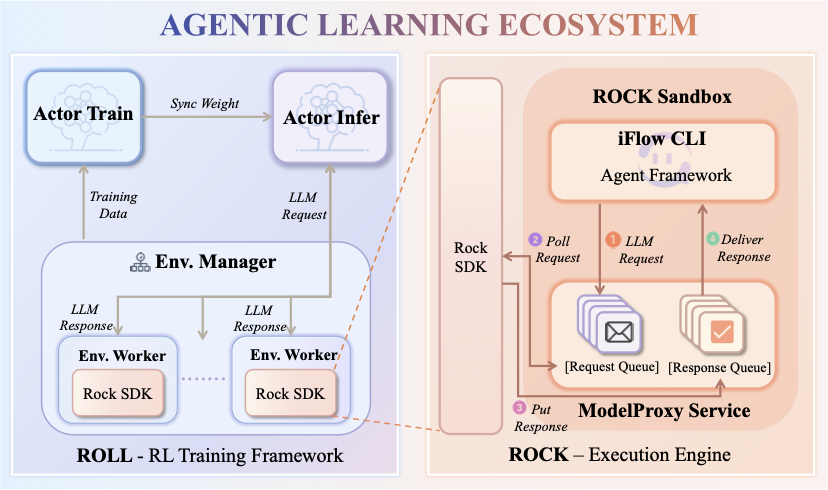
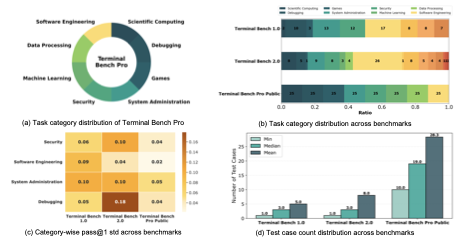
Agentic crafting requires LLMs to operate in real-world environments over multiple turns by taking actions, observing outcomes, and iteratively refining artifacts. Despite its importance, the open-source community lacks a principled, end-to-end ecosystem to streamline agent development. We introduce the Agentic Learning Ecosystem (ALE), a foundational infrastructure that optimizes the production pipeline for agentic model. ALE consists of three components: ROLL, a post-training framework for weight optimization; ROCK, a sandbox environment manager for trajectory generation; and iFlow CLI, an agent framework for efficient context engineering. We release ROME, an open-source agent grounded by ALE and trained on over one million trajectories. Our approach includes data composition protocols for synthesizing complex behaviors and a novel policy optimization algorithm, Interaction-Perceptive Agentic Policy Optimization (IPA), which assigns credit over semantic interaction chunks rather than individual tokens to improve long-horizon training stability. Empirically, we evaluate ROME within a structured setting and introduce Terminal Bench Pro, a benchmark with improved scale and contamination control. ROME demonstrates strong performance across benchmarks like SWE-bench Verified and Terminal Bench, proving the effectiveness of ALE.💡 Summary & Analysis
1. **Core Models for Time Series Prediction**: Among various deep learning models used to analyze time series data and predict future values, LSTM networks provide the most accurate results. 2. **Resource Efficiency vs Accuracy**: Balancing the need for more computational resources to achieve higher accuracy with LSTM versus other models that use fewer resources but still perform well is crucial. 3. **Model Selection Based on Dataset Complexity**: The challenge of selecting an appropriate model increases as dataset size and complexity grow.📄 Full Paper Content (ArXiv Source)
📊 논문 시각자료 (Figures)
![]()
![]()
![]()

![]()
![]()