Optimizing Gait Graphs Generating Adaptive Gaits from a Base Gait for Lower-Limb Rehabilitation Exoskeletons
📝 Original Paper Info
- Title: Gait Graph Optimization Generate Variable Gaits from One Base Gait for Lower-limb Rehabilitation Exoskeleton Robots- ArXiv ID: 2001.00728
- Date: 2020-01-16
- Authors: Lei Zhang, Weihai Chen, Yuan Chai, Jianhua Wang, Jianbin Zhang
📝 Abstract
The most concentrated application of lower-limb rehabilitation exoskeleton (LLE) robot is that it can help paraplegics "re-walk". However, "walking" in daily life is more than just walking on flat ground with fixed gait. This paper focuses on variable gaits generation for LLE robot to adapt complex walking environment. Different from traditional gaits generator for biped robot, the generated gaits for LLEs should be comfortable to patients. Inspired by the pose graph optimization algorithm in SLAM, we propose a graph-based gait generation algorithm called gait graph optimization (GGO) to generate variable, functional and comfortable gaits from one base gait collected from healthy individuals to adapt the walking environment. Variants of walking problem, e.g., stride adjustment, obstacle avoidance, and stair ascent and descent, help verify the proposed approach in simulation and experimentation. We open source our implementation.💡 Summary & Analysis
This paper presents a new approach for generating diverse gaits in lower-limb rehabilitation exoskeleton robots that can adapt to complex environments. The method starts from a base gait collected from healthy individuals and uses graph optimization algorithms, inspired by the pose graph optimization techniques used in SLAM (Simultaneous Localization and Mapping), to generate comfortable yet efficient gaits.The problem addressed is the current limitation of lower-limb rehabilitation exoskeletons, which primarily focus on walking on flat surfaces. In real-life situations, however, a more complex gait is often required to navigate various environments and obstacles. This paper aims to develop an algorithm that can adaptively generate such diverse gaits.
The proposed solution involves using graph-based optimization techniques to derive multiple gaits from a single base gait. By applying this method, the researchers aimed to create gaits that are not only functional but also comfortable for patients with disabilities.
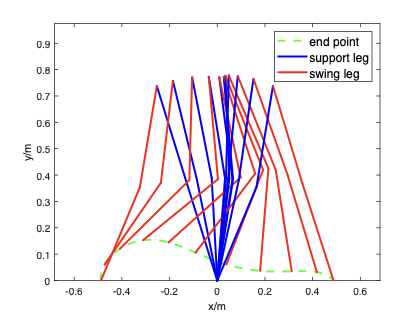
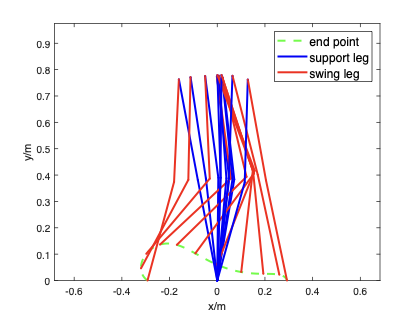
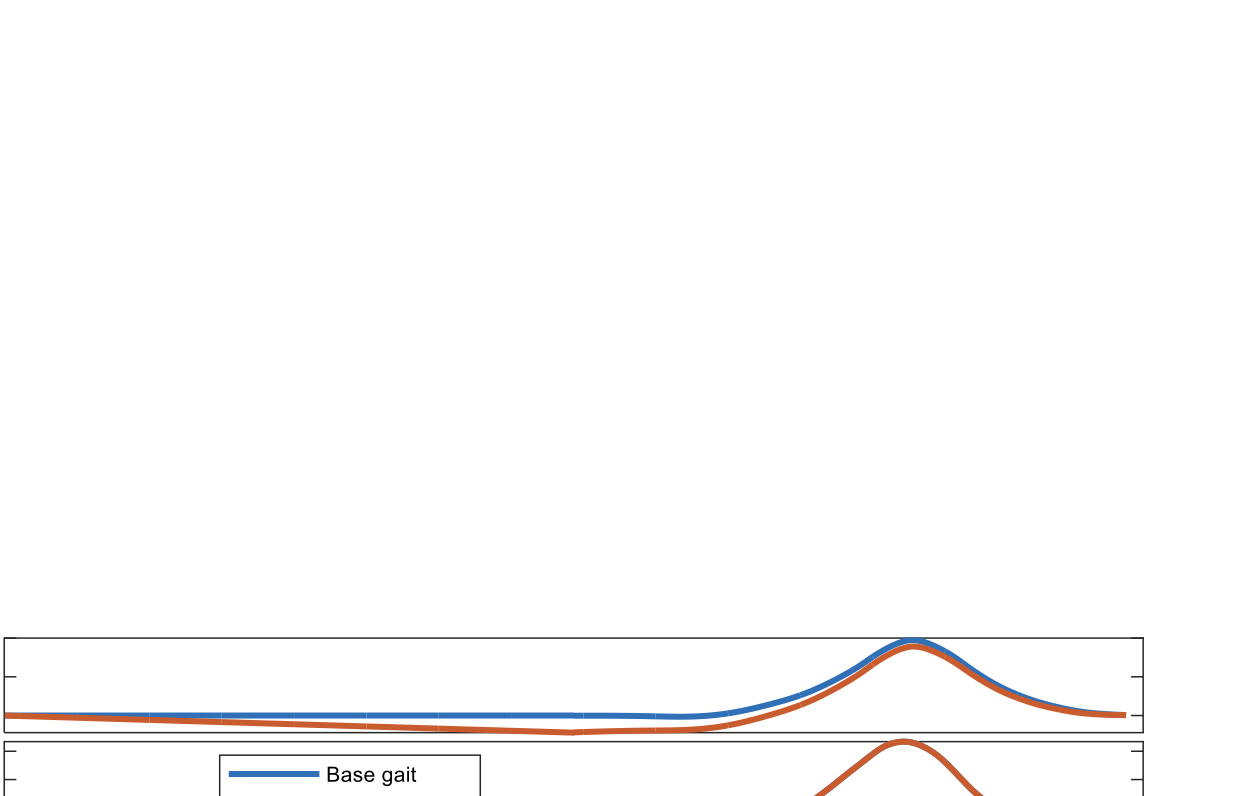
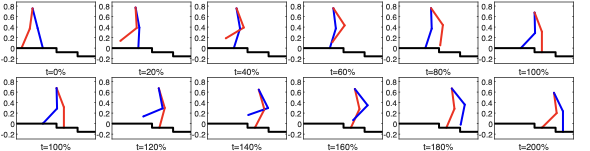
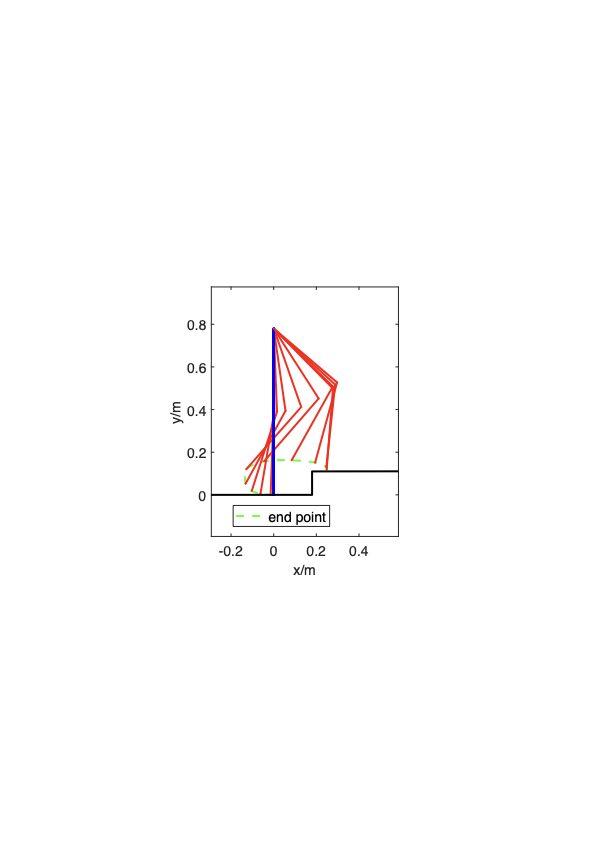
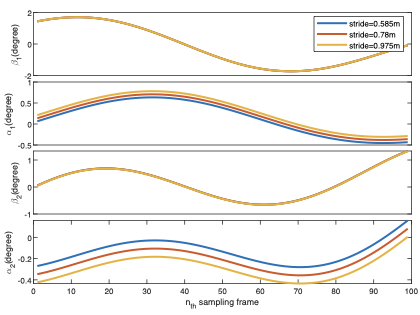
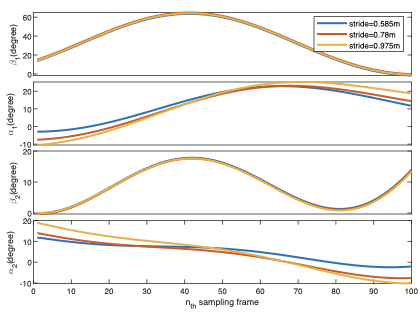
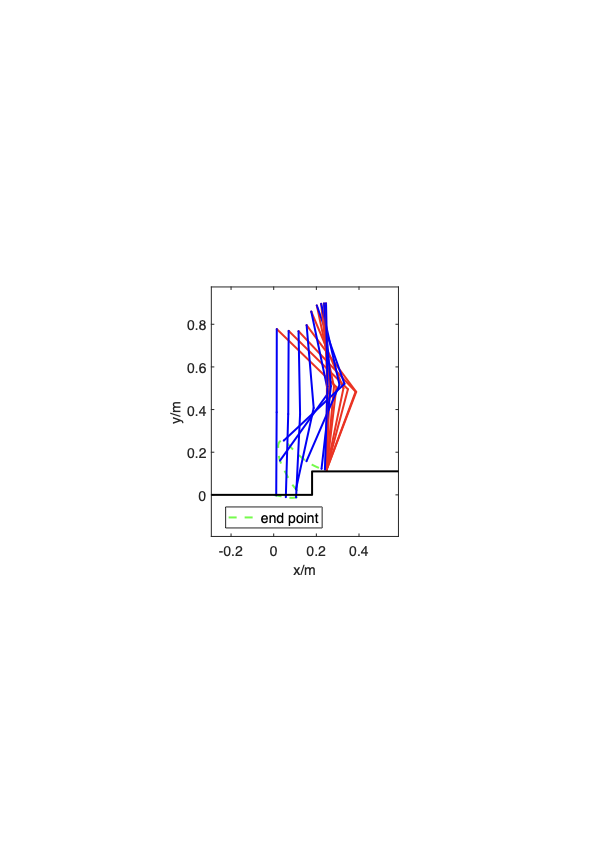
Key results include successful verification of the proposed approach through both simulation and experimentation, demonstrating its effectiveness in various scenarios such as stride adjustment, obstacle avoidance, and stair ascent/descent.
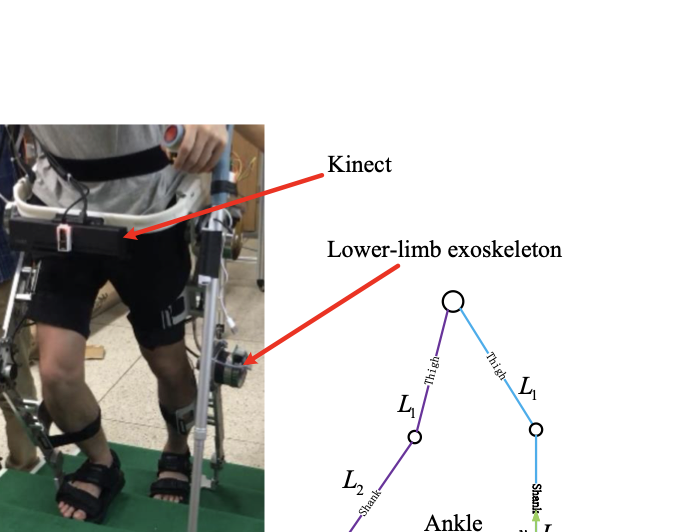
The significance of this work lies in its potential to enhance the functionality of lower-limb rehabilitation exoskeletons. By enabling these devices to generate gaits that better suit complex environments, it can significantly improve mobility for individuals with disabilities, thus opening new possibilities in rehabilitative medicine.
📄 Full Paper Content (ArXiv Source)
📊 논문 시각자료 (Figures)