S&CNet Monocular Depth Completion for Autonomous Systems and 3D Reconstruction
📝 Original Paper Info
- Title: S&CNet Monocular Depth Completion for Autonomous Systems and 3D Reconstruction- ArXiv ID: 1907.06071
- Date: 2019-08-30
- Authors: Lei Zhang, Weihai Chen, Chao Hu, Xingming Wu, Zhengguo Li
📝 Abstract
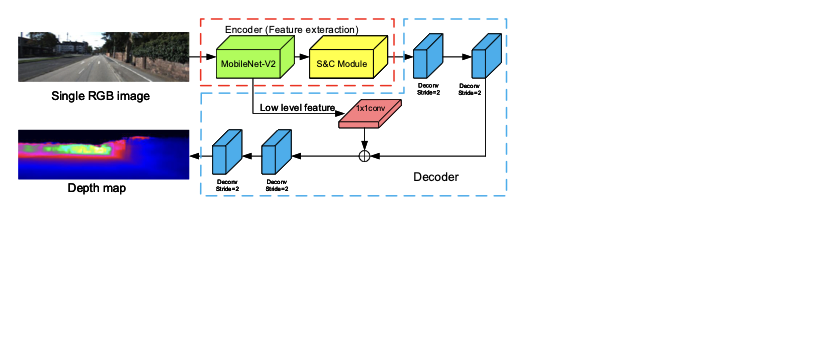
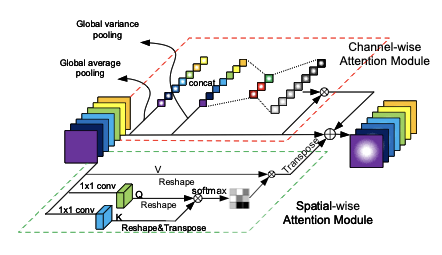
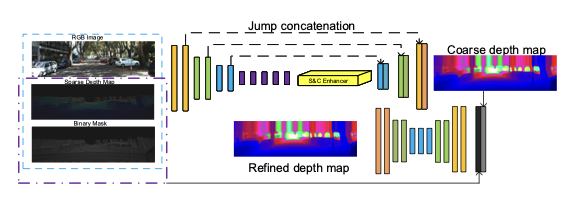
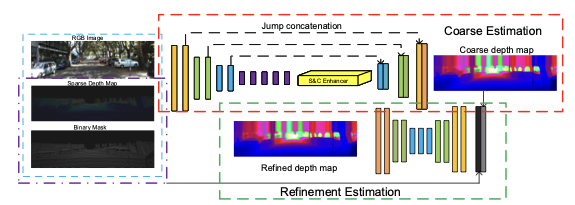
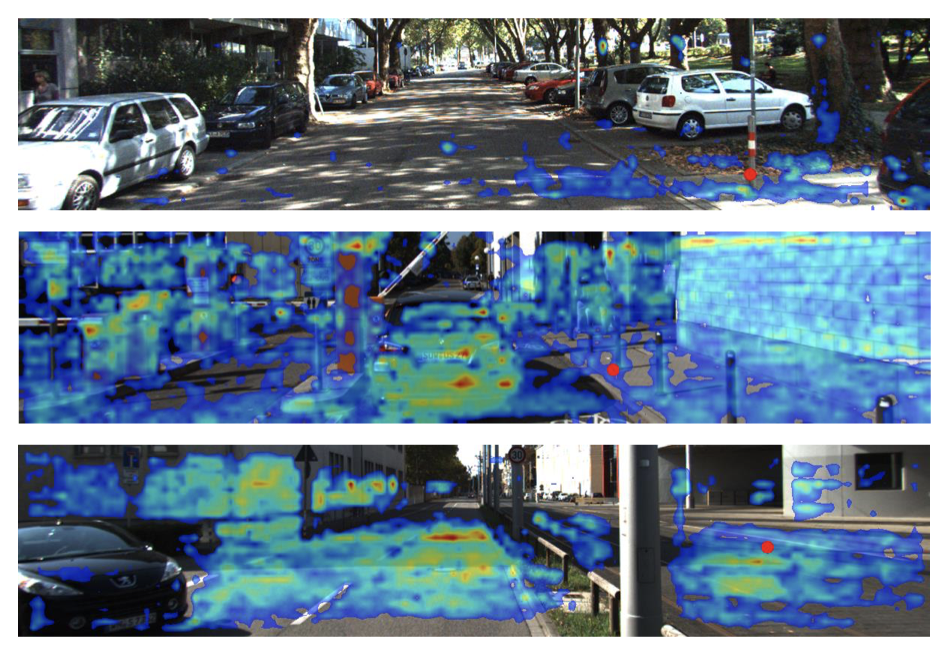
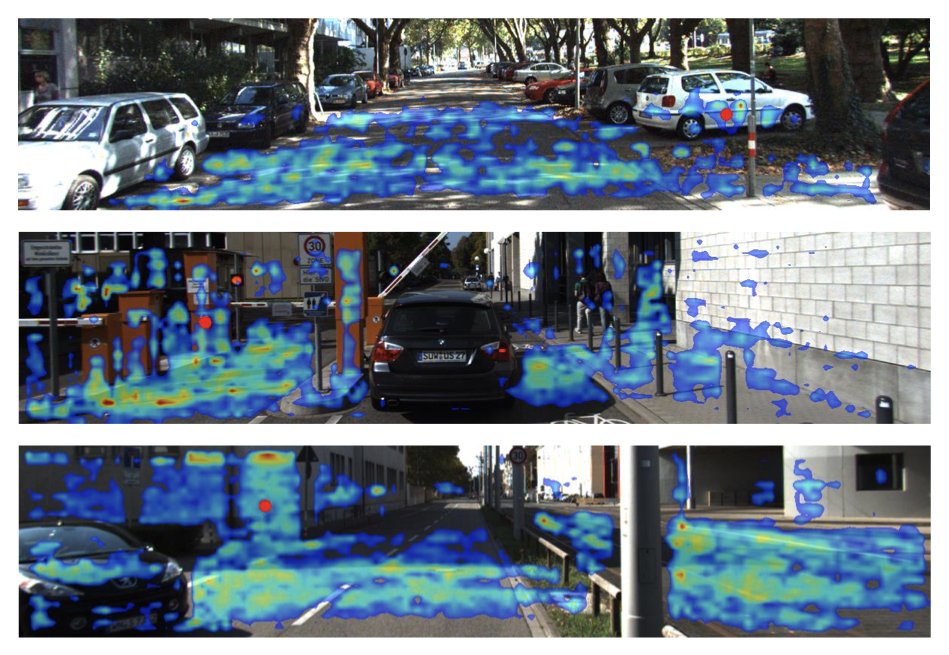
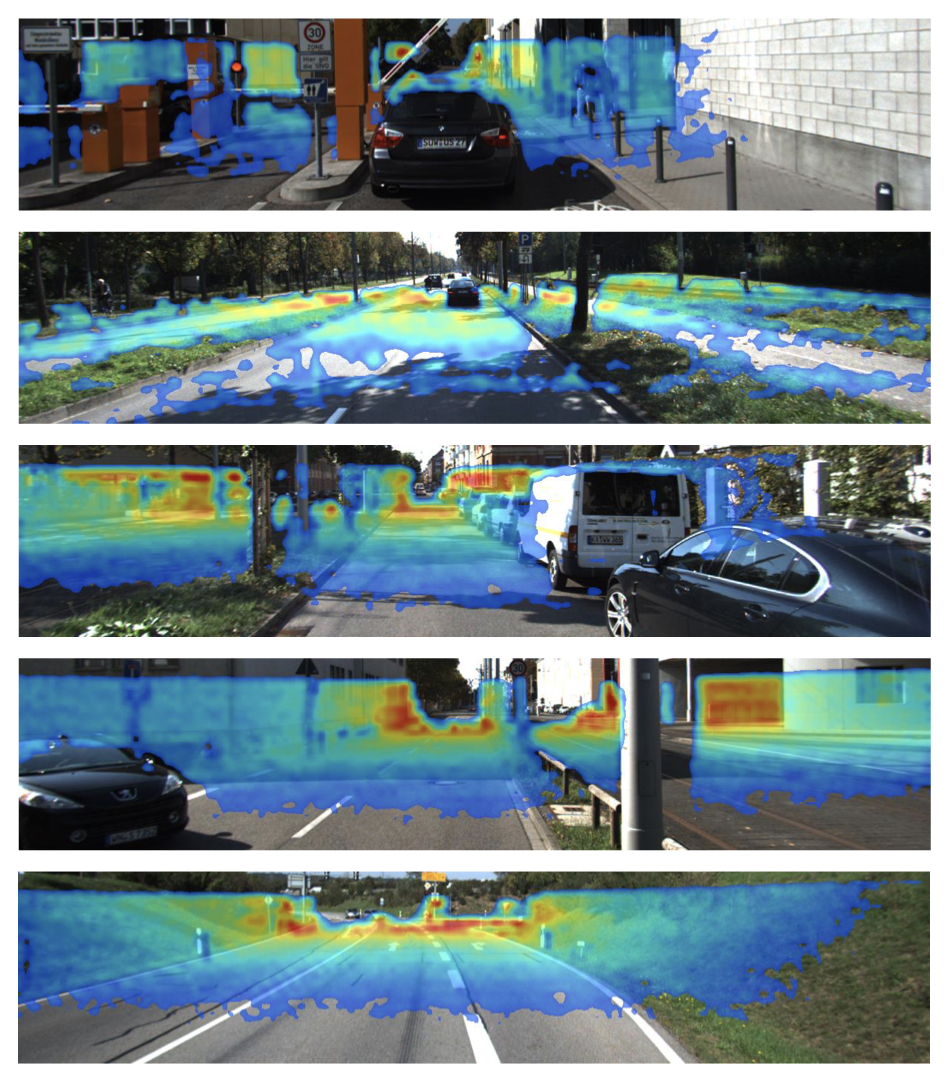
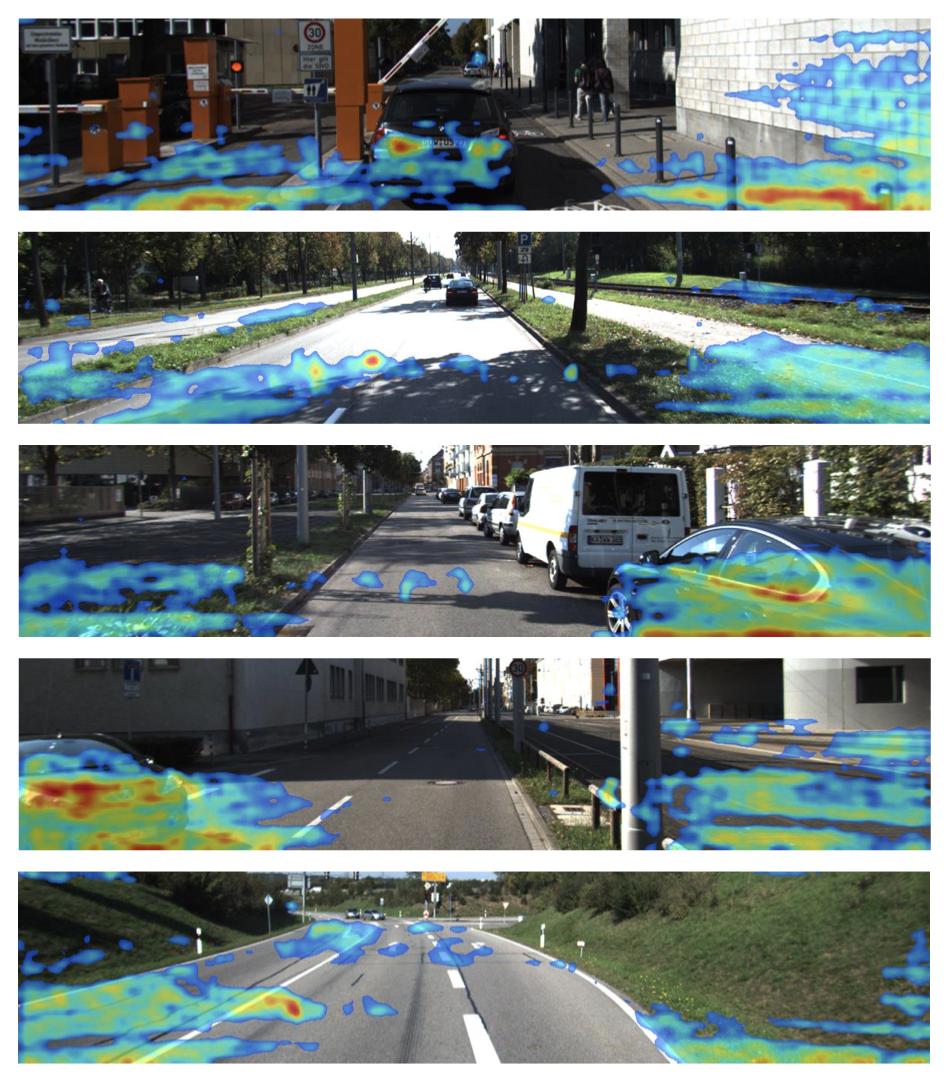
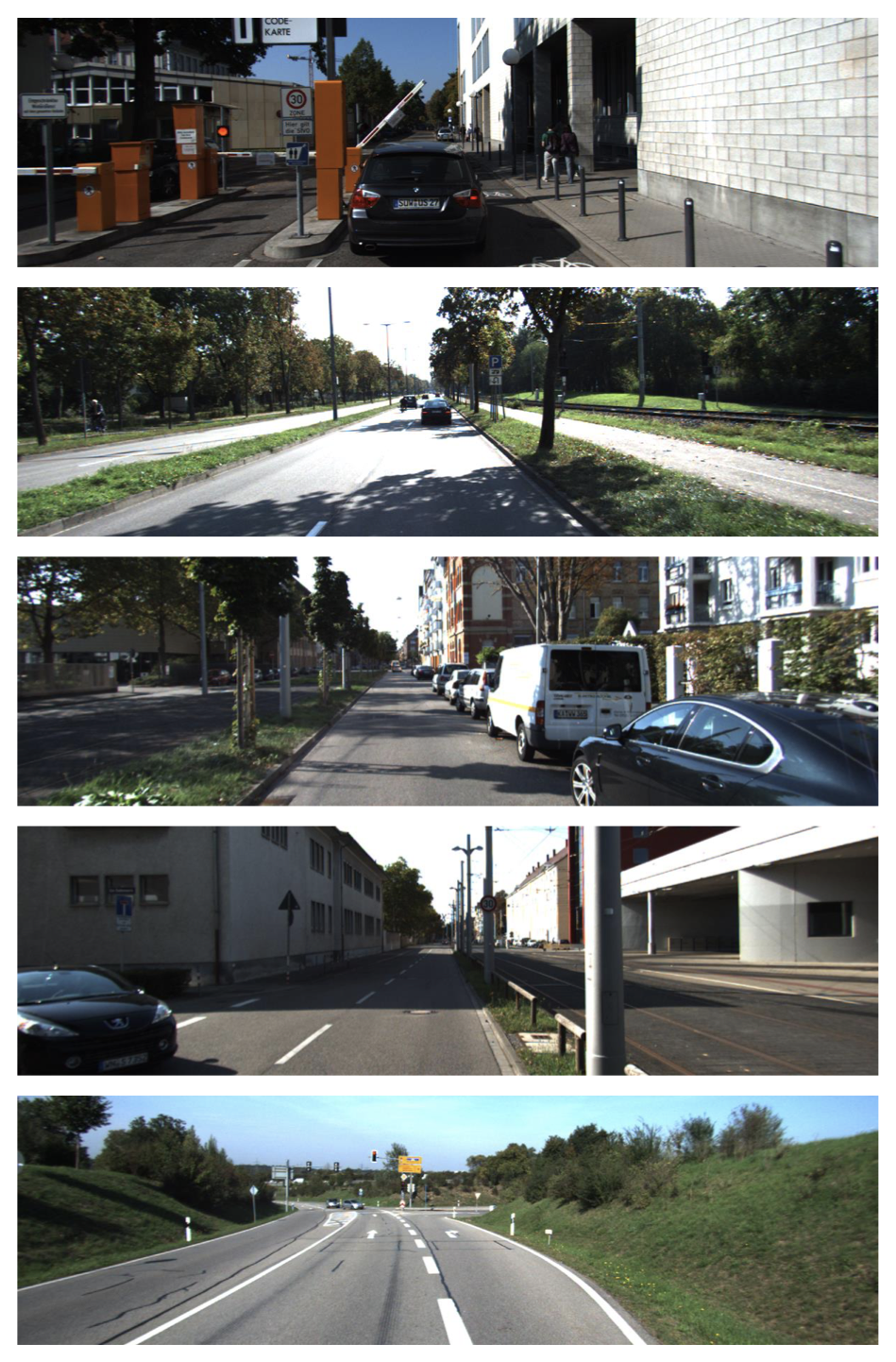
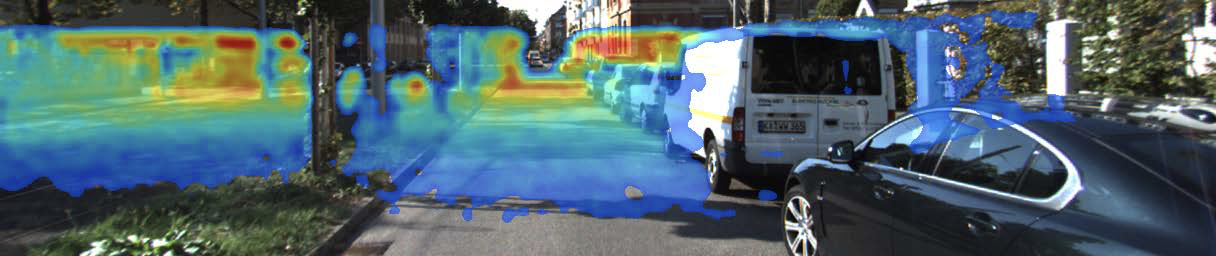
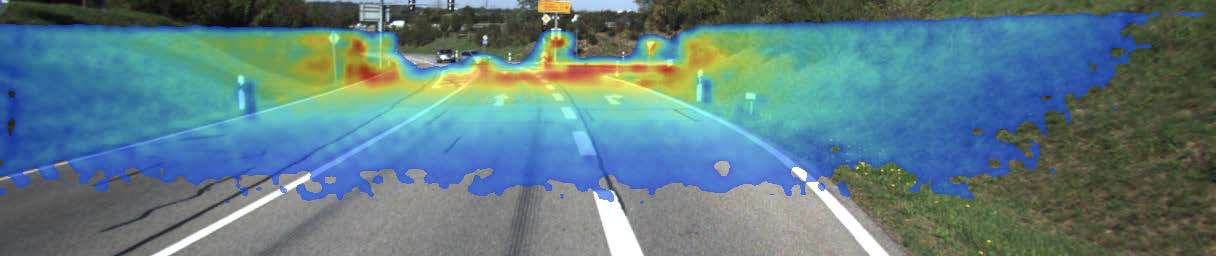
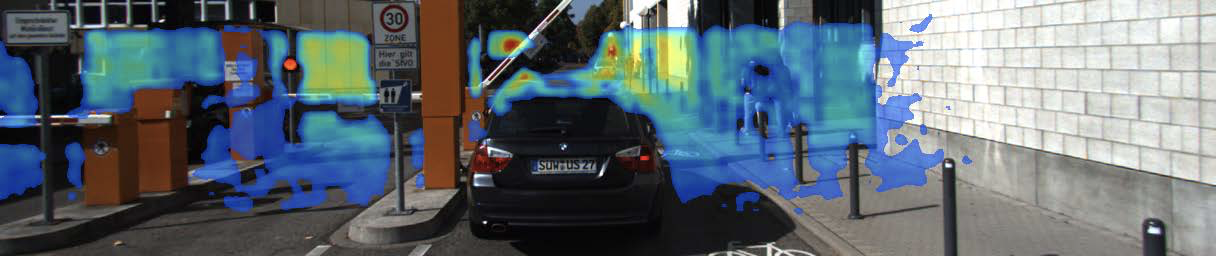
Dense depth completion is essential for autonomous systems and 3D reconstruction. In this paper, a lightweight yet efficient network (S\&CNet) is proposed to obtain a good trade-off between efficiency and accuracy for the dense depth completion. A dual-stream attention module (S\&C enhancer) is introduced to measure both spatial-wise and the channel-wise global-range relationship of extracted features so as to improve the performance. A coarse-to-fine network is designed and the proposed S\&C enhancer is plugged into the coarse estimation network between its encoder and decoder network. Experimental results demonstrate that our approach achieves competitive performance with existing works on KITTI dataset but almost four times faster. The proposed S\&C enhancer can be plugged into other existing works and boost their performance significantly with a negligible additional computational cost.💡 Summary & Analysis
This paper introduces S&CNet, a lightweight yet efficient network designed for dense depth completion crucial in autonomous systems and 3D reconstruction. The core innovation is the dual-stream attention module called S&C enhancer that measures global-range relationships of spatial and channel-wise extracted features to boost performance. This module is integrated into a coarse-to-fine network architecture between its encoder and decoder layers.The problem addressed here is that existing methods for depth completion are often computationally expensive or slow, which is not ideal for real-time applications like autonomous driving or drone navigation. The solution proposed is the S&CNet, which aims to balance efficiency and accuracy. By integrating the S&C enhancer into the network architecture, it enhances feature extraction and processing, leading to better performance.
Experimental results show that this approach achieves competitive performance on the KITTI dataset while being almost four times faster than existing methods. The S&C enhancer can be integrated into other networks, significantly boosting their performance with minimal additional computational cost.
The significance of this work lies in its potential application across various fields where real-time dense depth completion is essential, such as autonomous vehicles and drones. It provides a robust solution that balances processing speed and accuracy, making it particularly valuable for real-world applications requiring quick decisions based on accurate depth information.
📄 Full Paper Content (ArXiv Source)
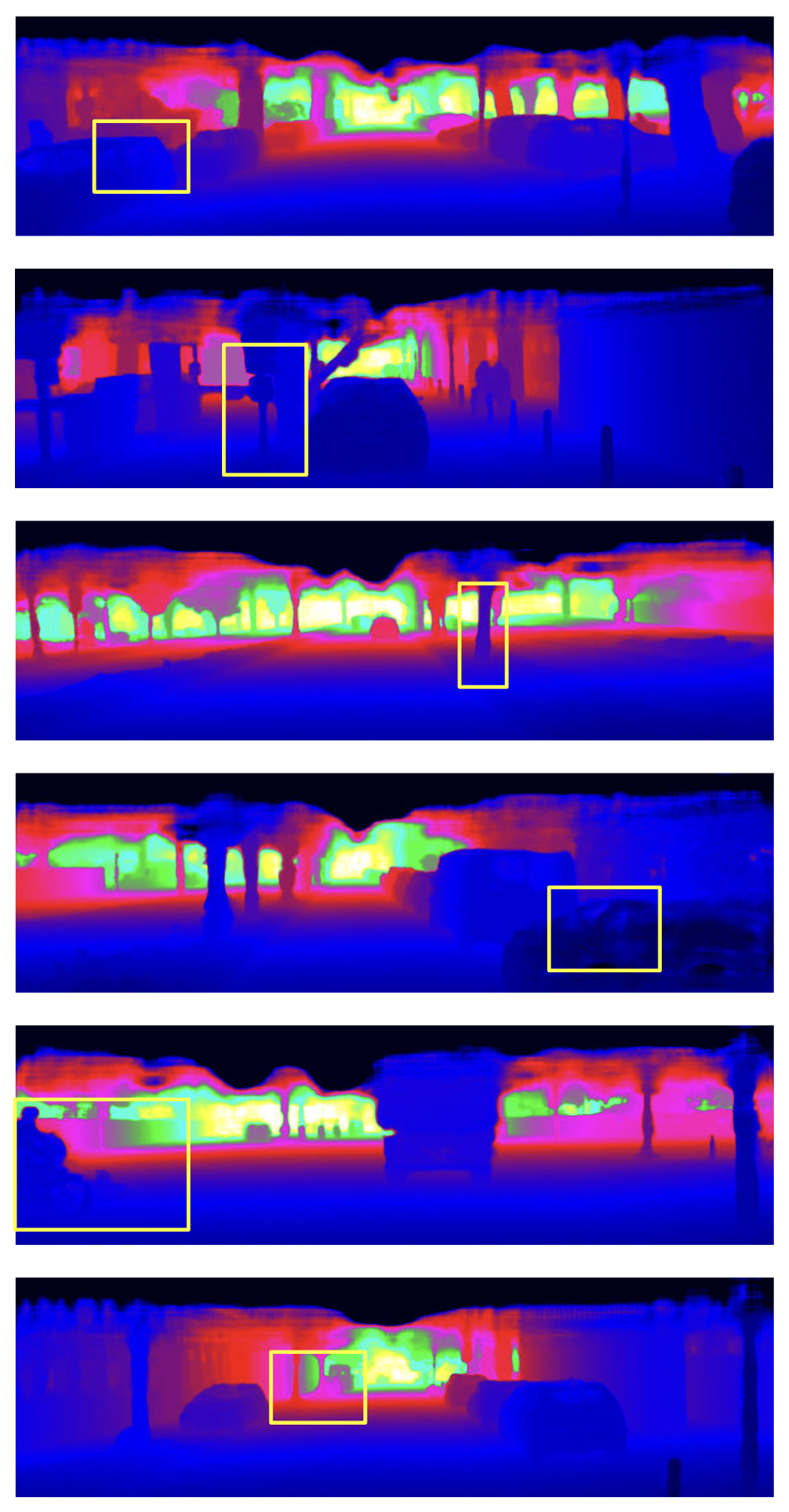
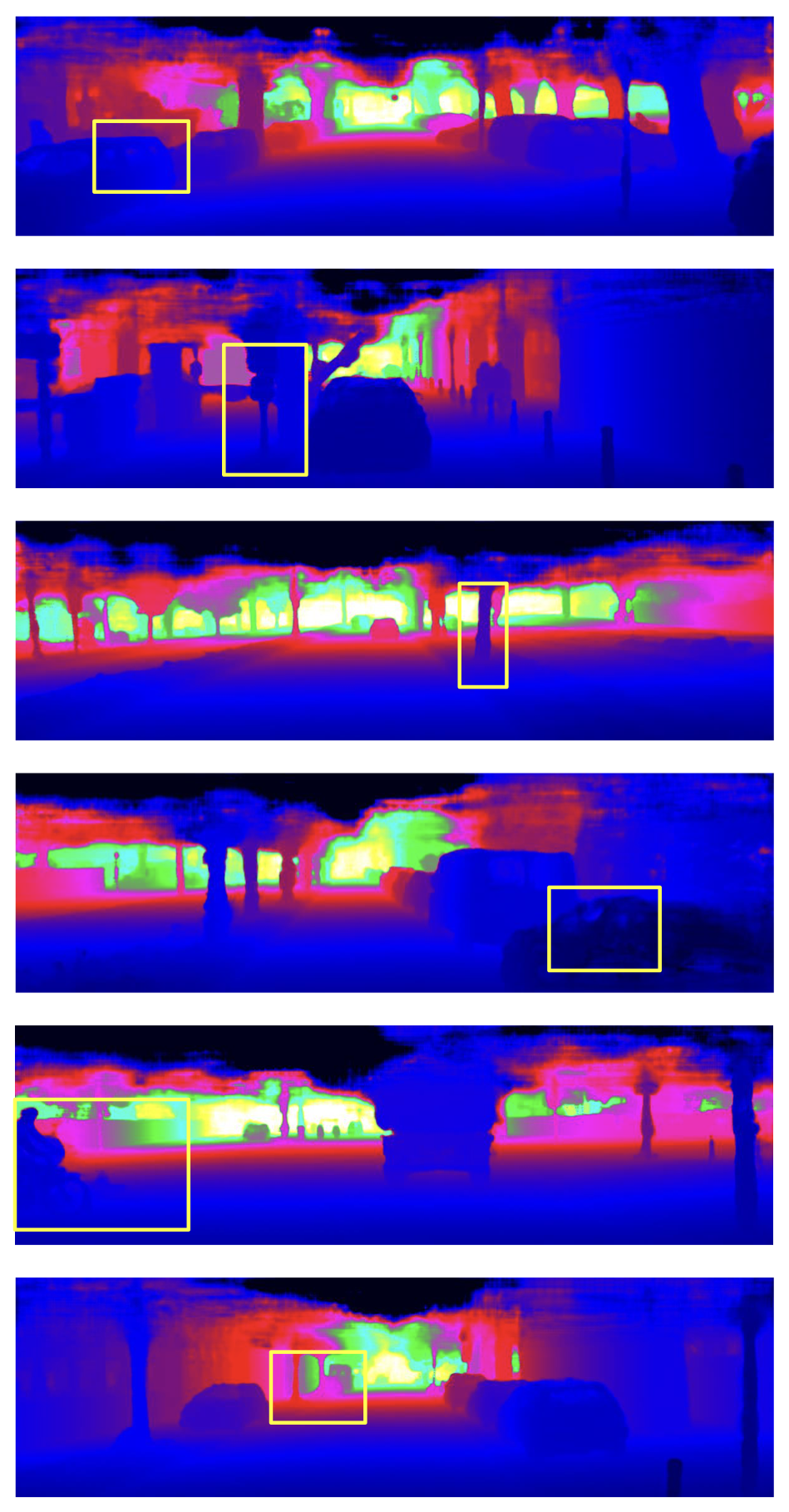
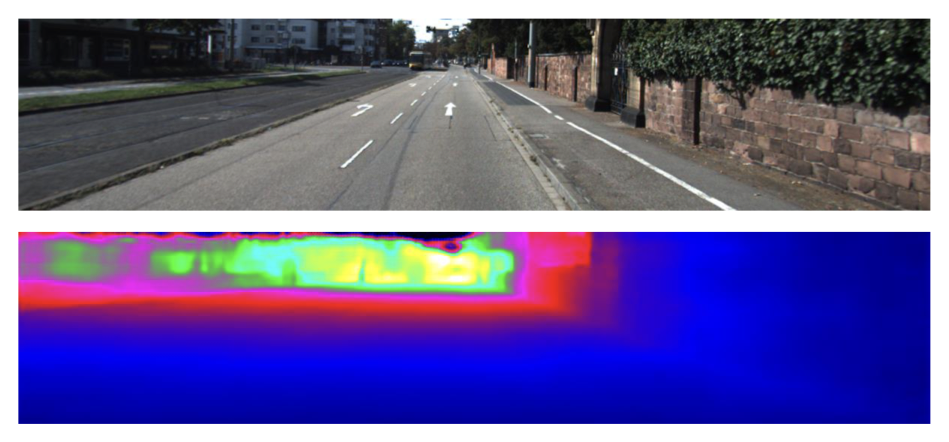
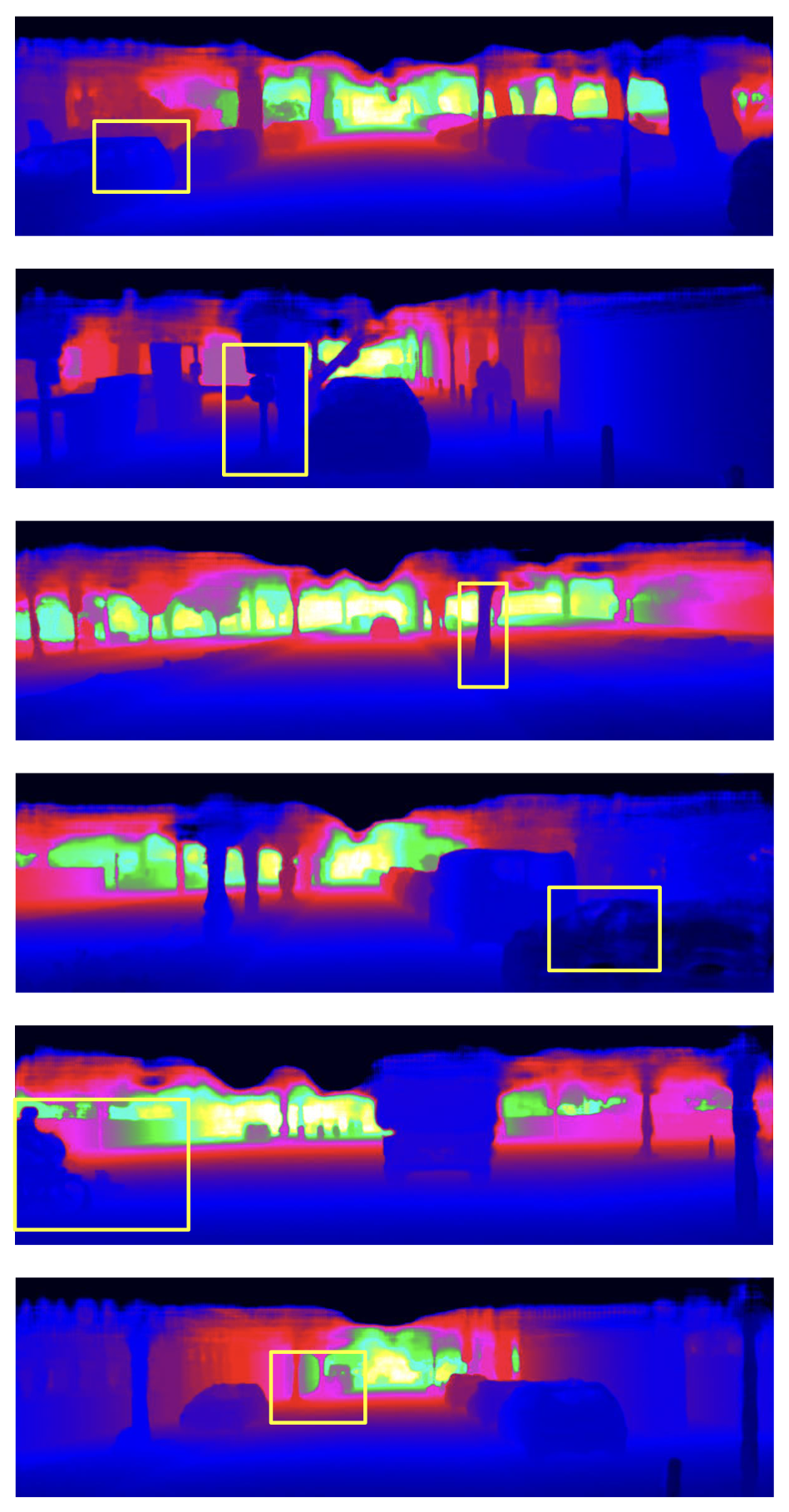
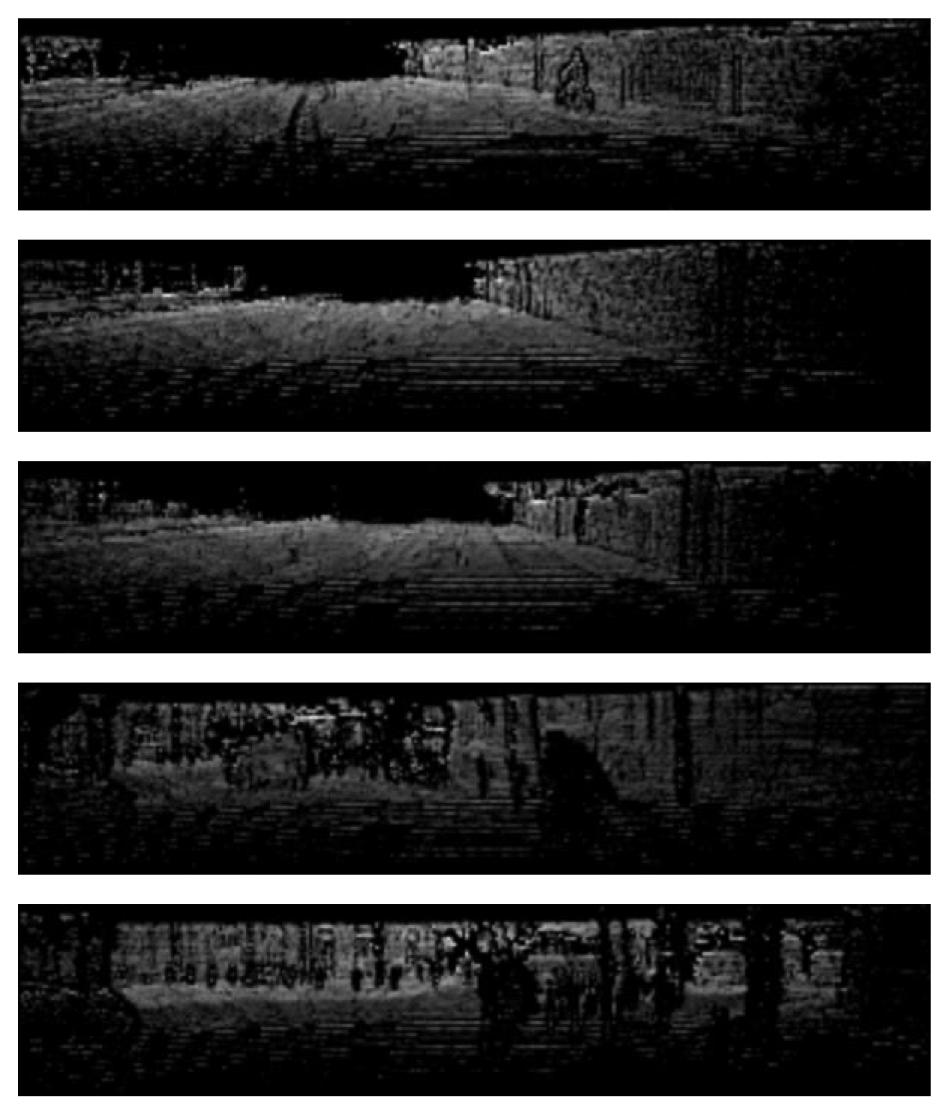
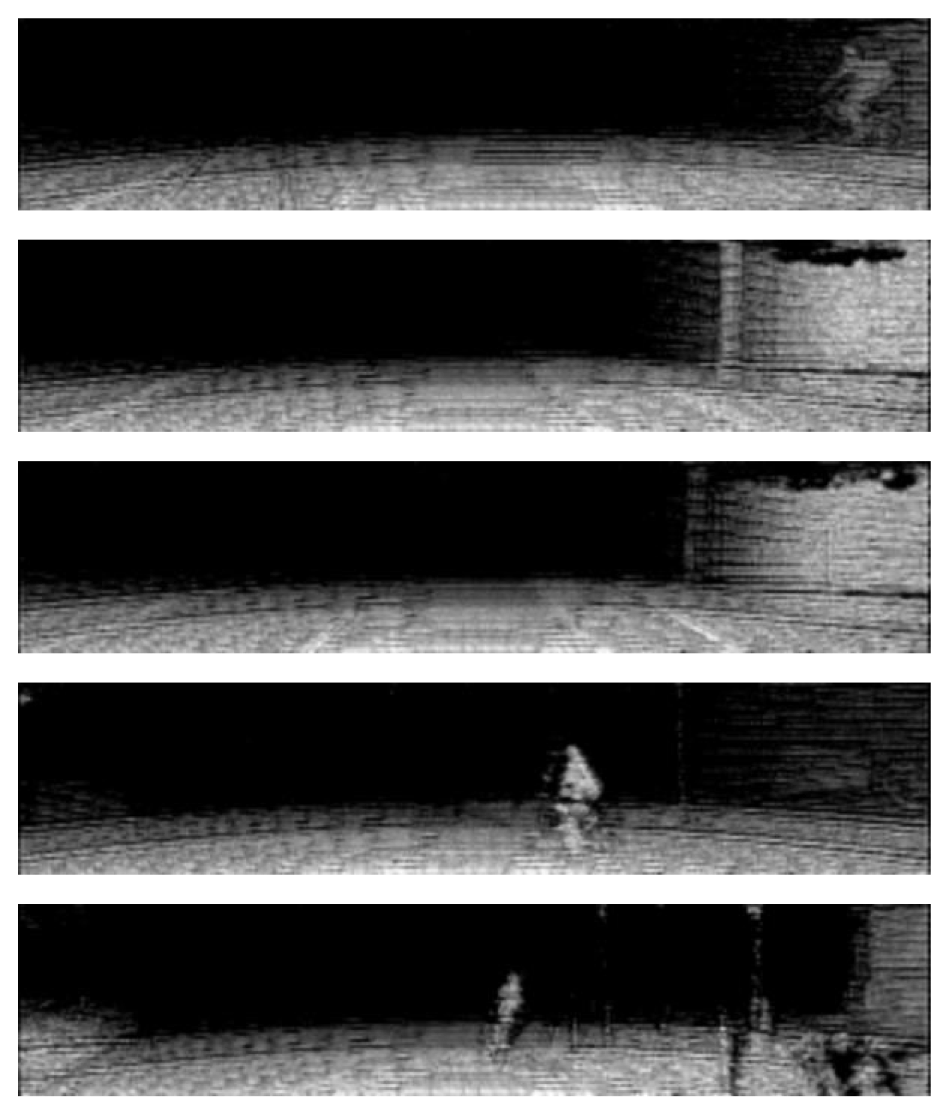
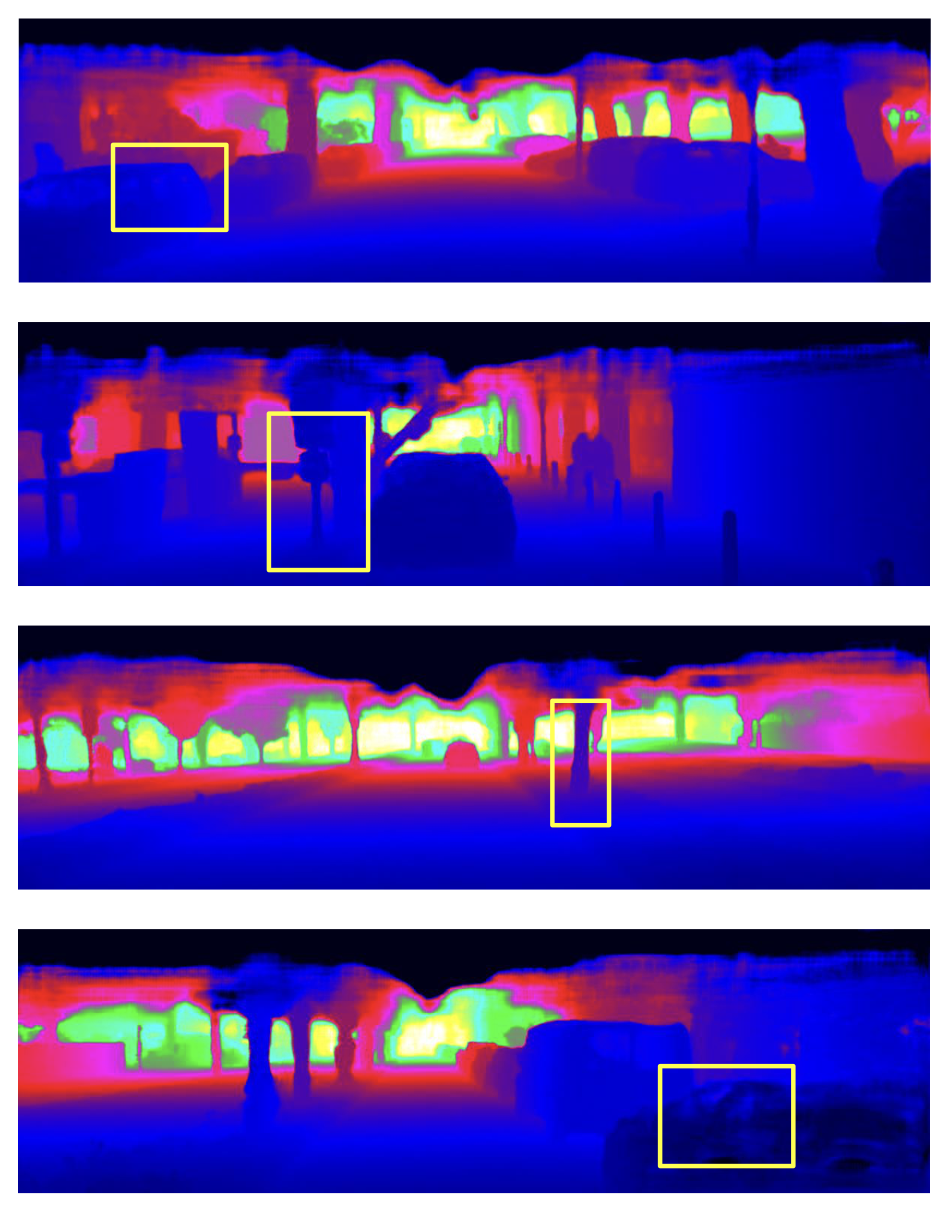
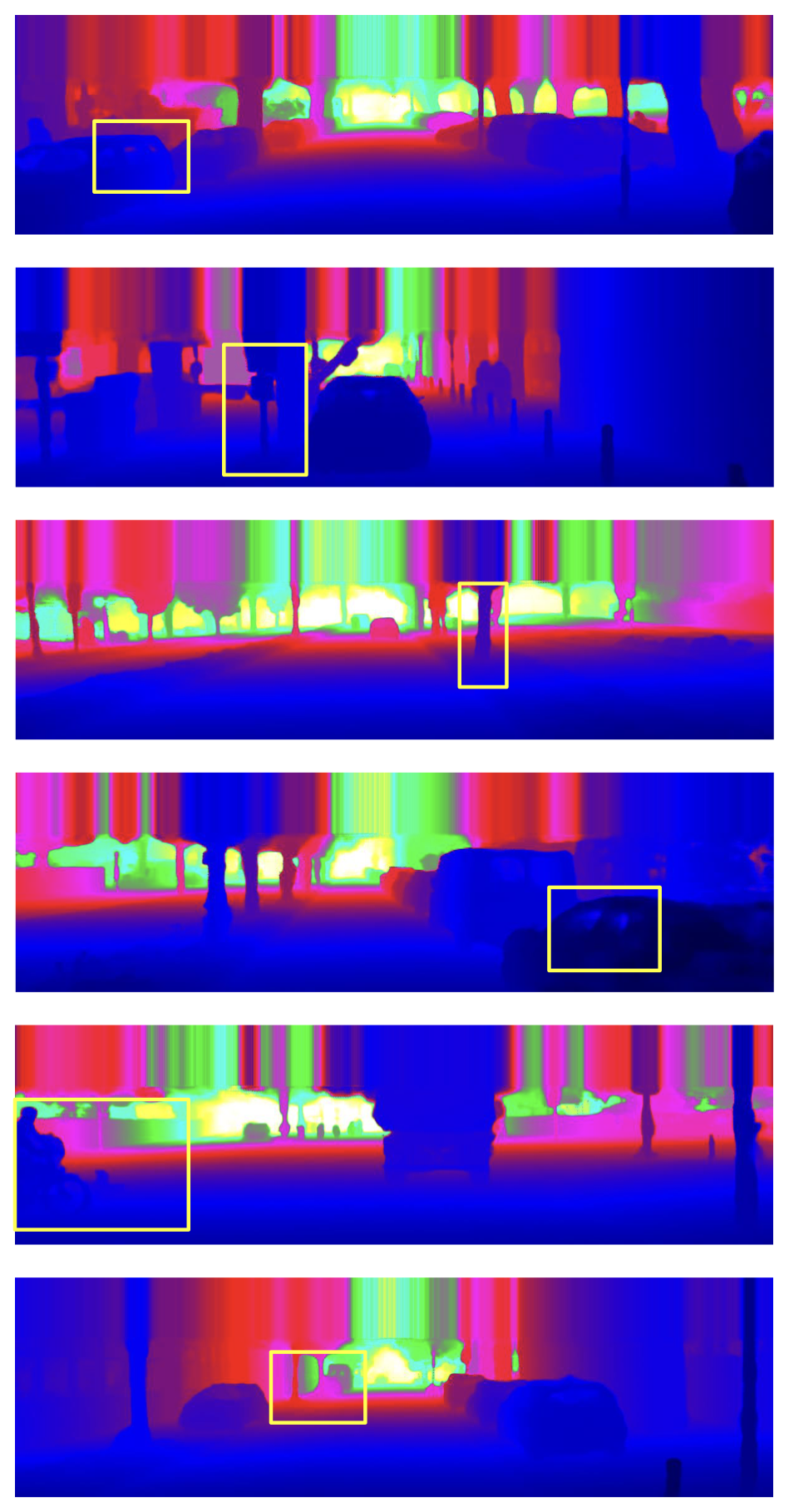
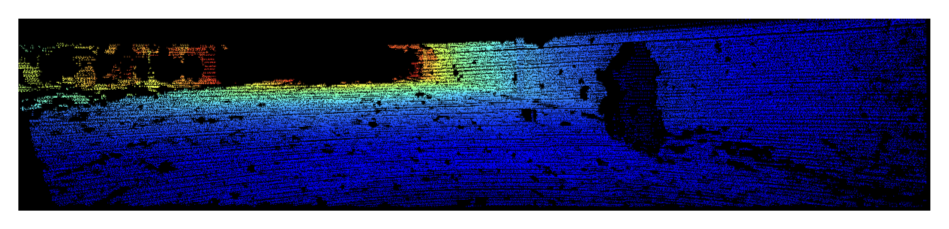
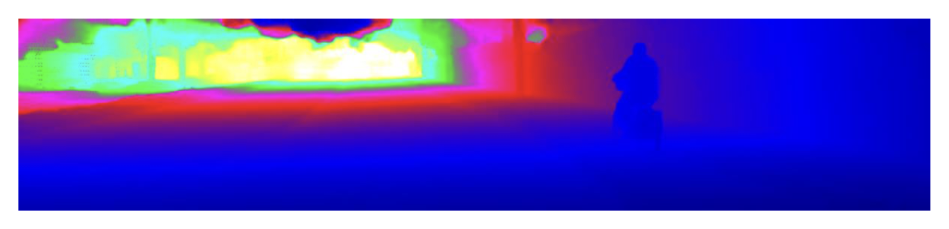
📊 논문 시각자료 (Figures)