Control of the Painlevé Paradox in a Robotic System
📝 Original Paper Info
- Title: Control of Painlev e Paradox in a Robotic System- ArXiv ID: 1907.04070
- Date: 2019-07-10
- Authors: Davide Marchese, Marco Coraggio, S. John Hogan, Mario di Bernardo
📝 Abstract
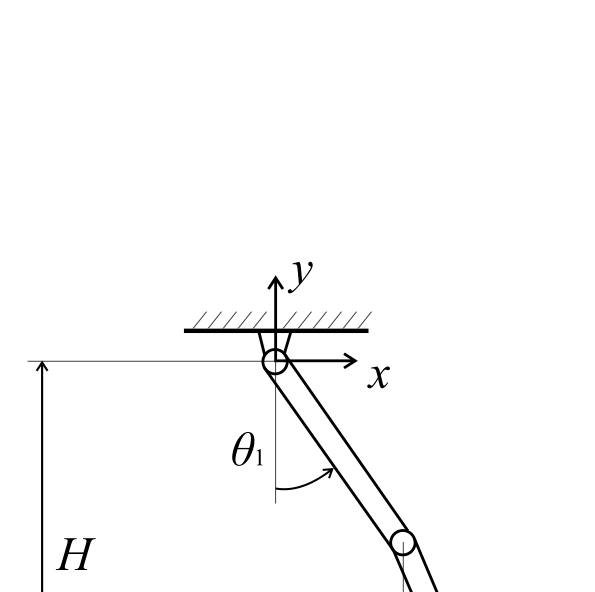
The Painlev\'e paradox is a phenomenon that causes instability in mechanical systems subjects to unilateral constraints. While earlier studies were mostly focused on abstract theoretical settings, recent work confirmed the occurrence of the paradox in realistic set-ups. In this paper, we investigate the dynamics and presence of the Painlev\'e phenomenon in a twolinks robot in contact with a moving belt, through a bifurcation study. Then, we use the results of this analysis to inform the design of control strategies able to keep the robot sliding on the belt and avoid the onset of undesired lift-off. To this aim, through numerical simulations, we synthesise and compare a PID strategy and a hybrid force/motion control scheme, finding that the latter is able to guarantee better performance and avoid the onset of bouncing motion due to the Painlev\'e phenomenon.💡 Summary & Analysis
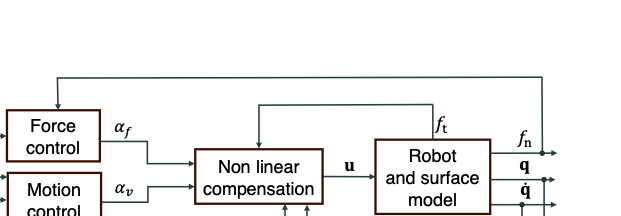
This paper explores methods to control and address the Painlevé paradox in robotic systems. Specifically, it investigates the dynamics of a two-link robot interacting with a moving belt and identifies how this interaction can lead to instability due to the Painlevé phenomenon. The researchers employ bifurcation analysis and mathematical modeling to understand these interactions more deeply.The core challenge is that when robots interact with surfaces that are in motion, such as belts, they may experience unpredictable lift-off or bouncing movements due to the Painlevé paradox. This can disrupt their operation and reduce efficiency. To tackle this issue, the researchers developed two control strategies: a traditional PID (Proportional-Integral-Derivative) control strategy and a hybrid force/motion control scheme.
Through extensive numerical simulations, they evaluated both methods’ effectiveness in maintaining stable sliding motion while preventing unwanted lift-off events. The results indicated that the hybrid control method outperformed the PID approach, successfully mitigating the adverse effects of the Painlevé phenomenon. This finding is significant as it offers a practical solution to enhance the performance and reliability of robotic systems operating on moving surfaces.
📄 Full Paper Content (ArXiv Source)
📊 논문 시각자료 (Figures)