Reachability-Based Safety and Goal Satisfaction of Unmanned Aerial Platoons on Air Highways
📝 Original Info
- Title: Reachability-Based Safety and Goal Satisfaction of Unmanned Aerial Platoons on Air Highways
- ArXiv ID: 1602.08150
- Date: 2017-02-01
- Authors: Mo Chen, Qie Hu, Jaime Fisac, Kene Akametalu, Casey Mackin, Claire Tomlin
📝 Abstract
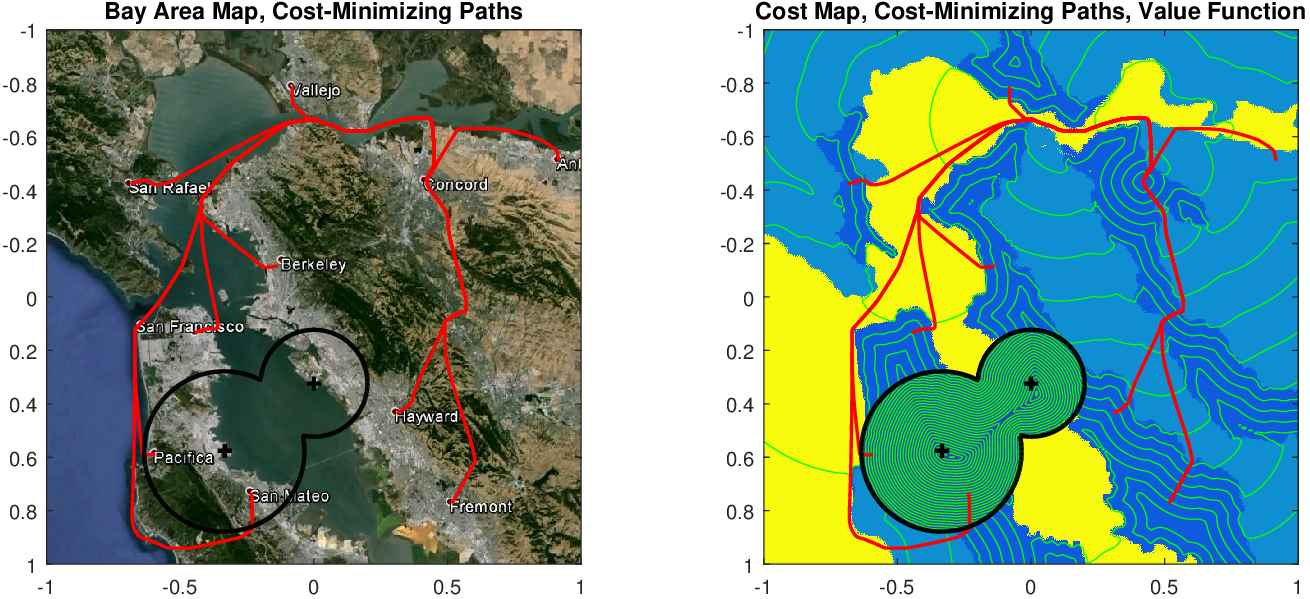
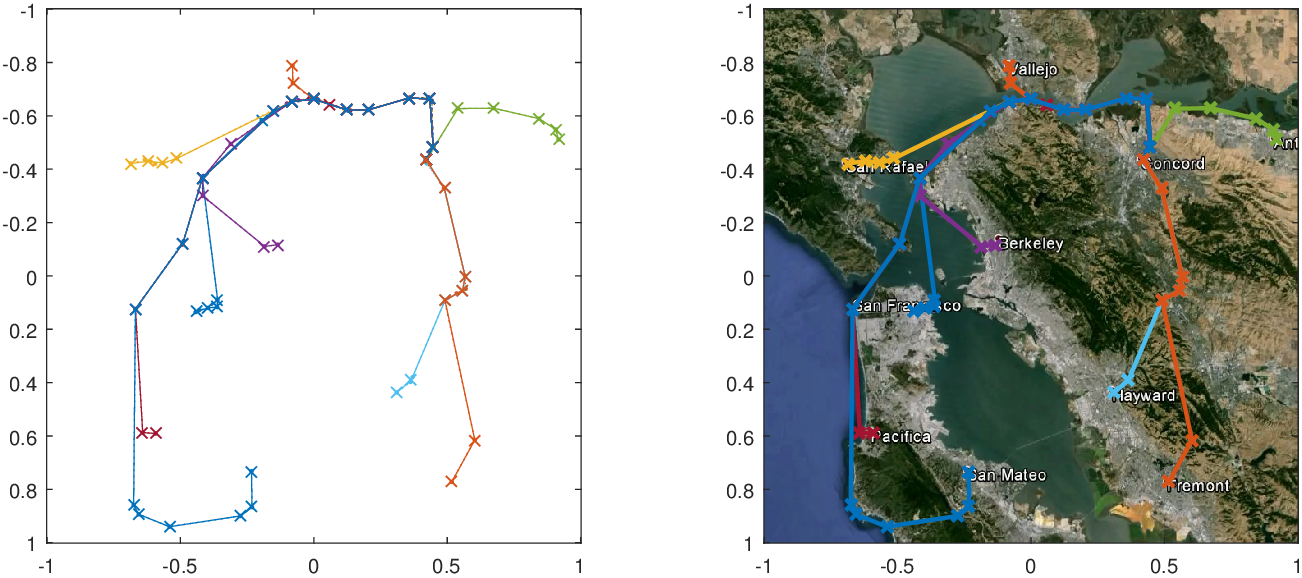
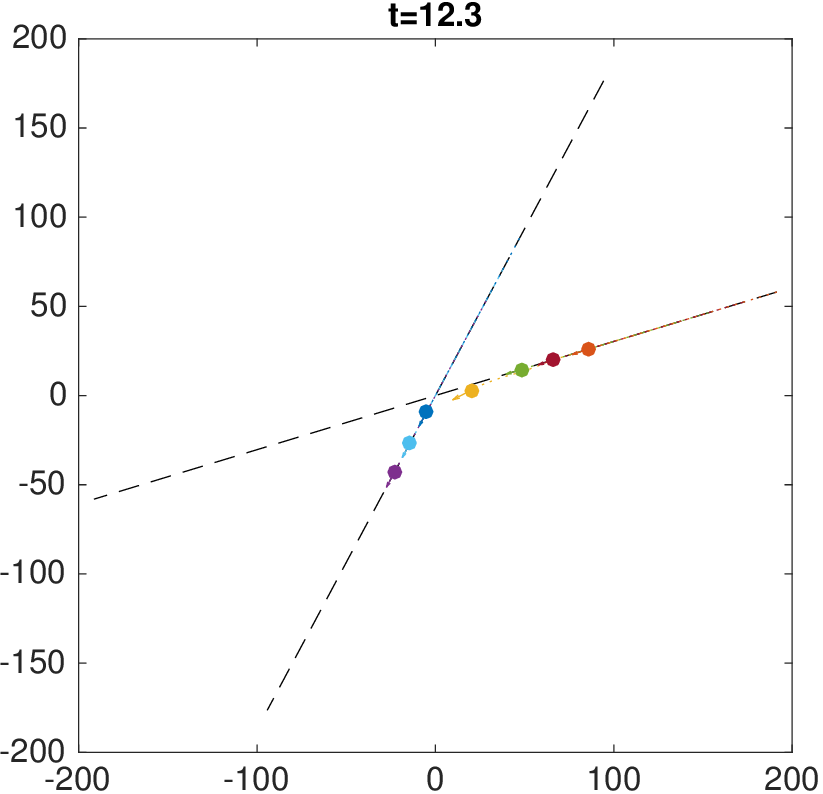
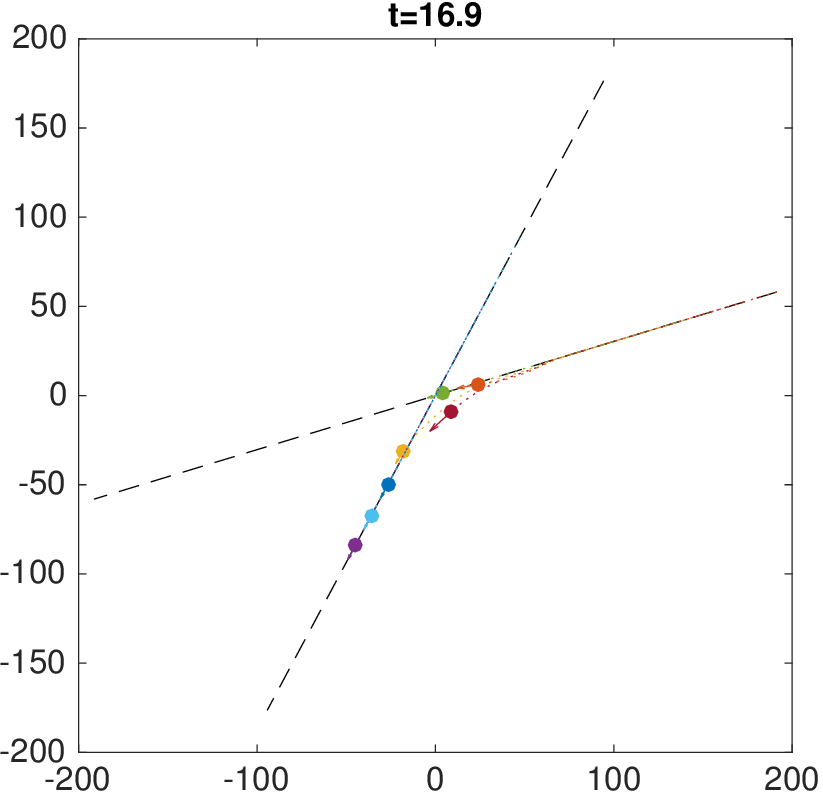
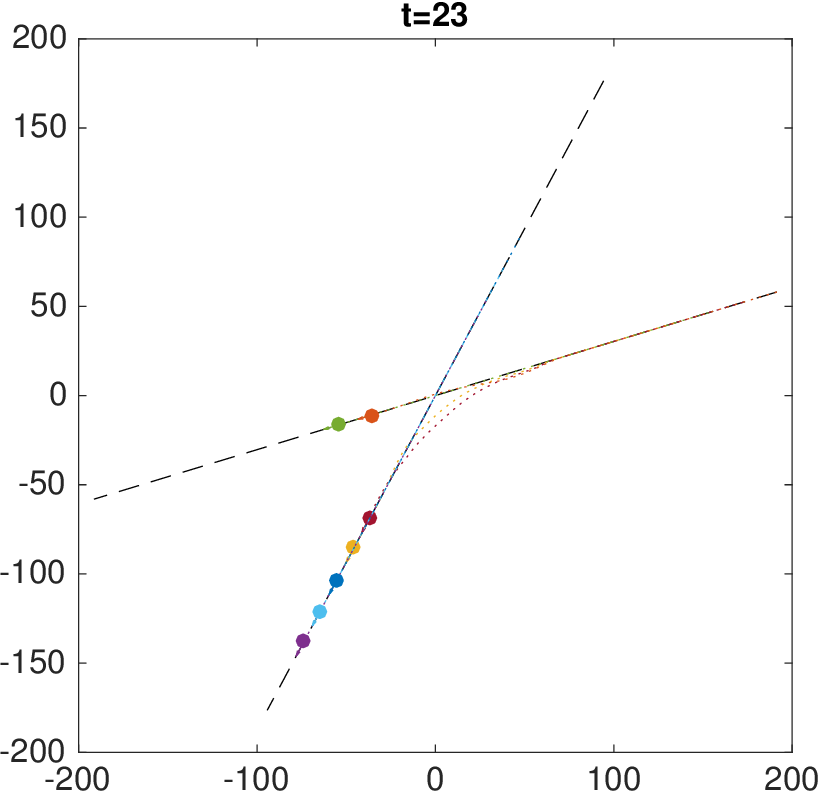
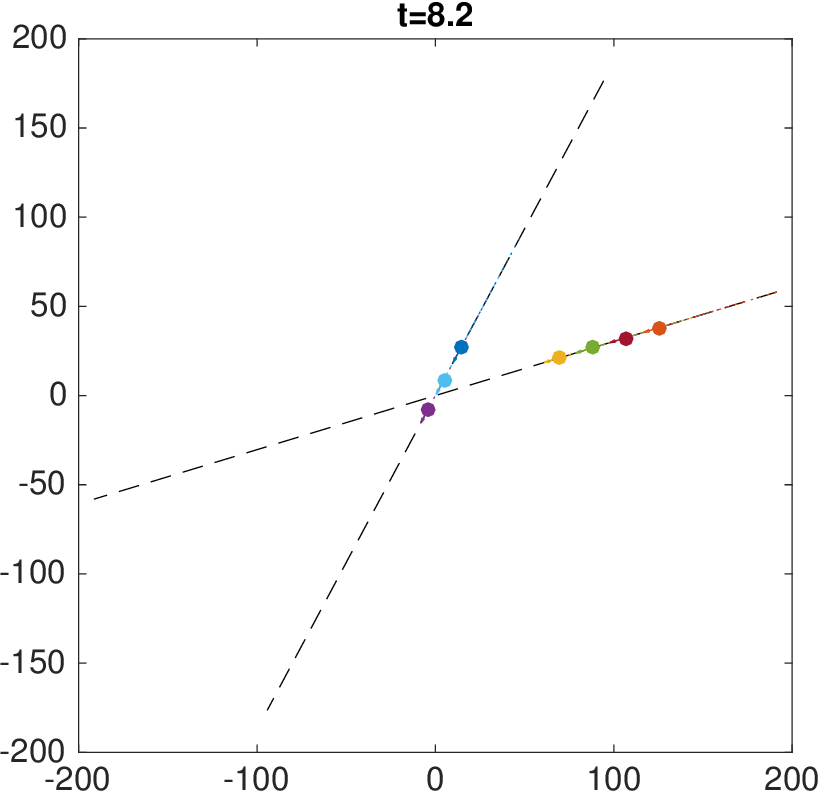
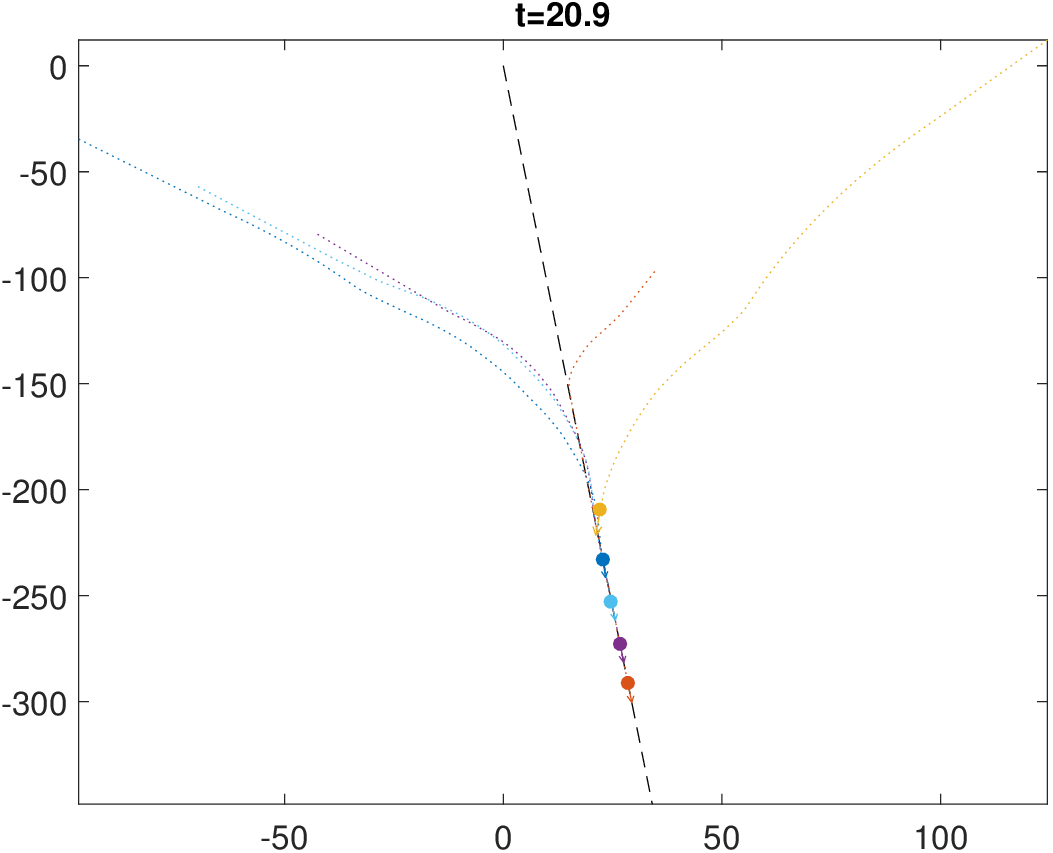
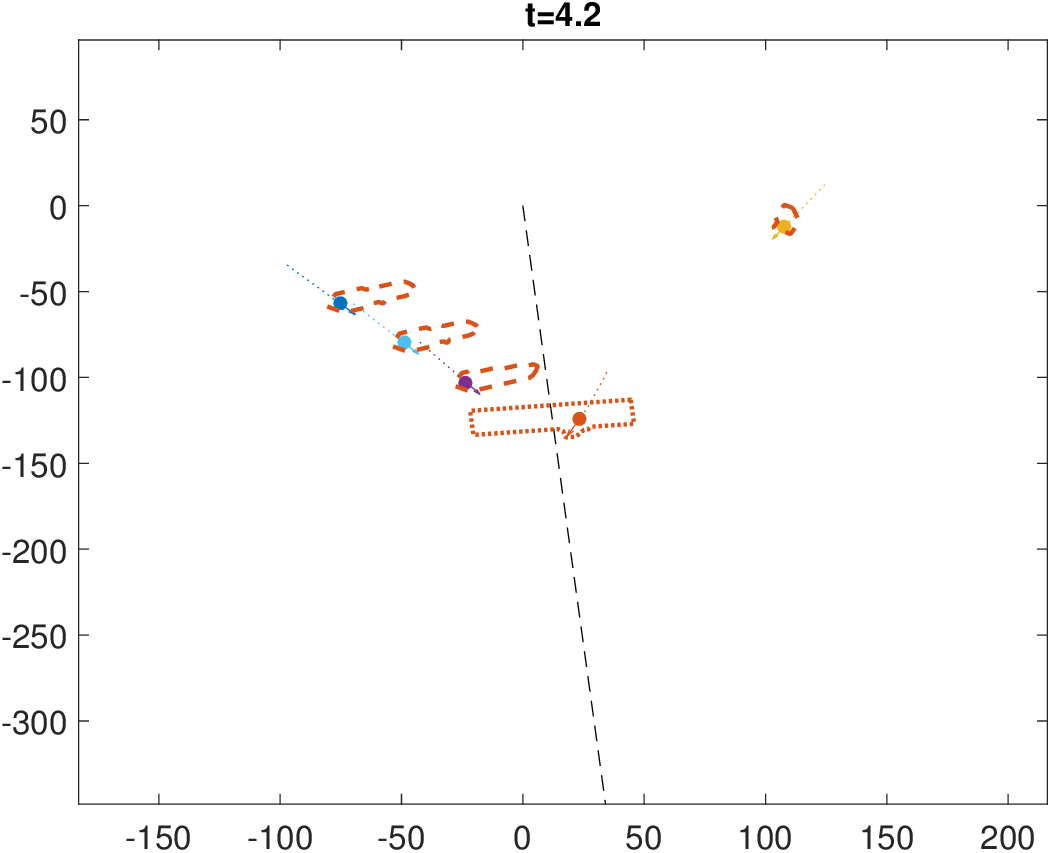
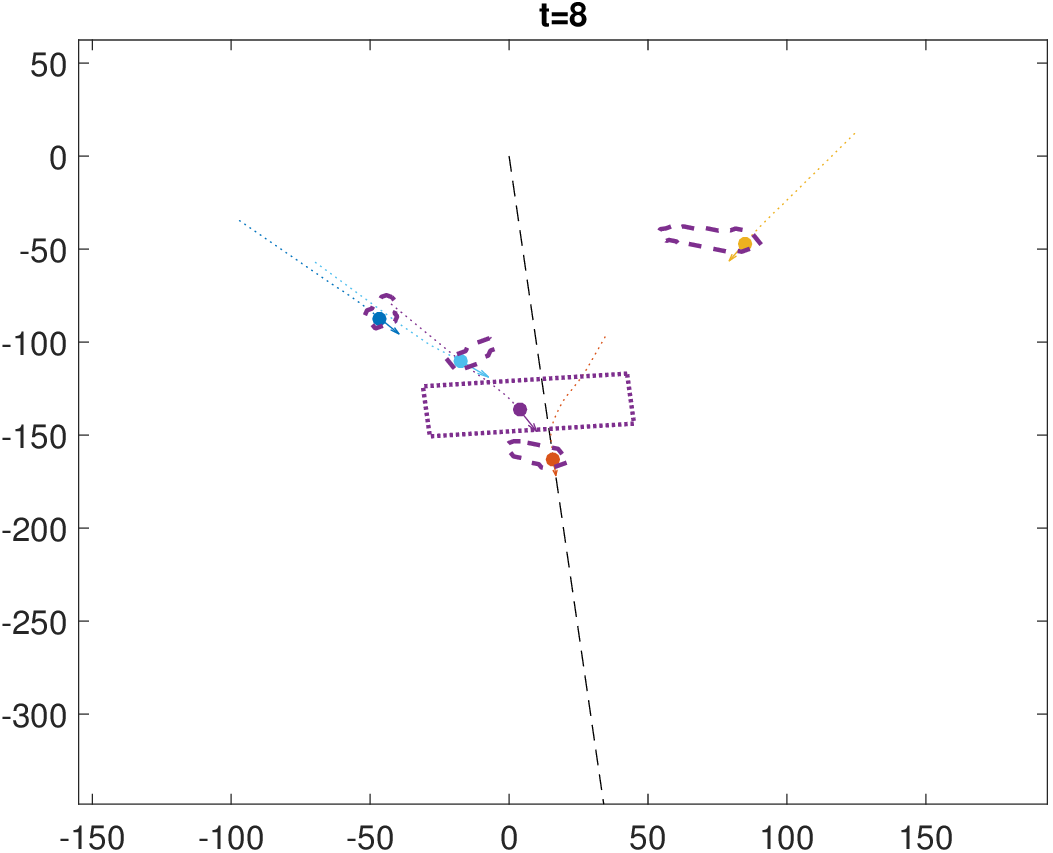
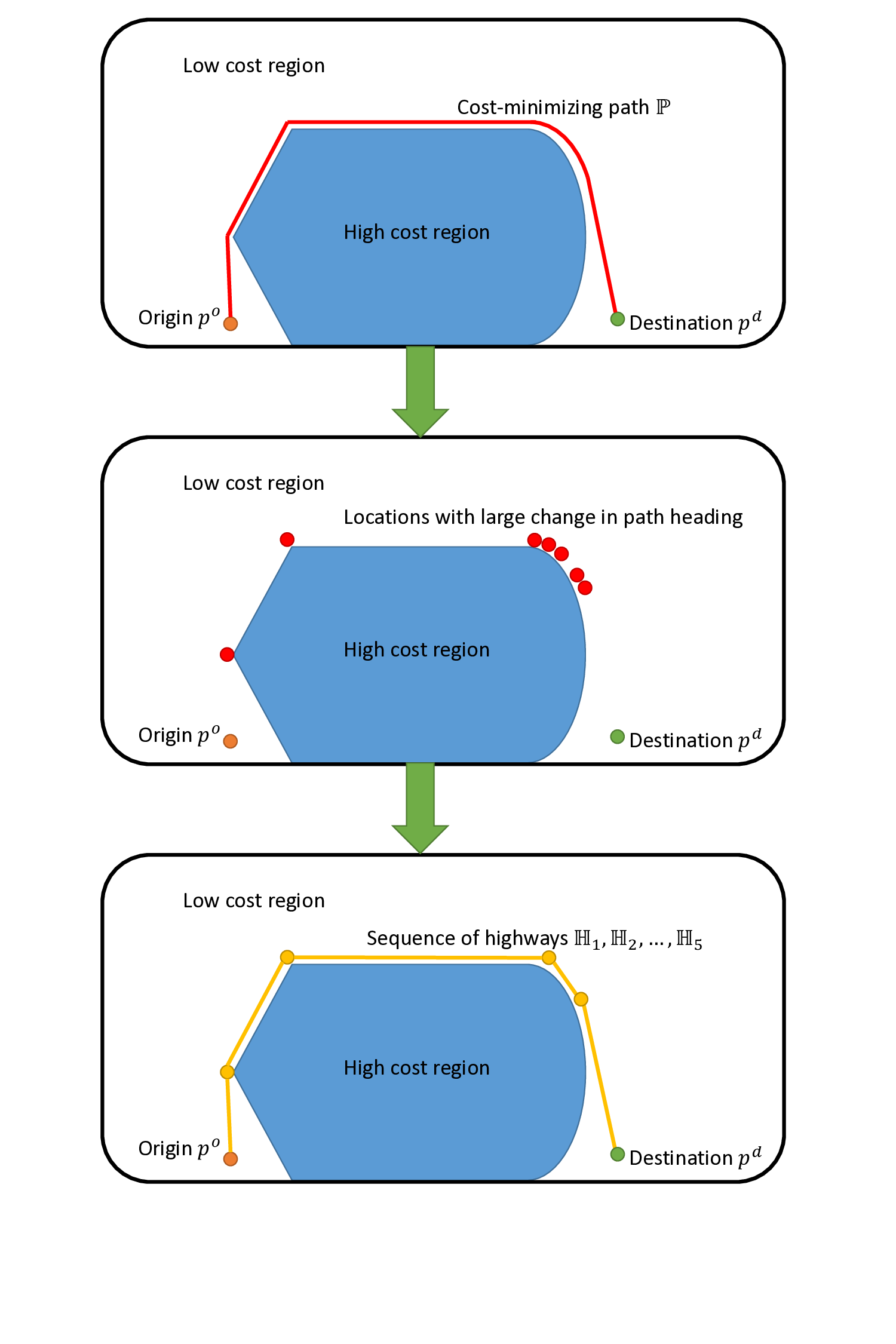
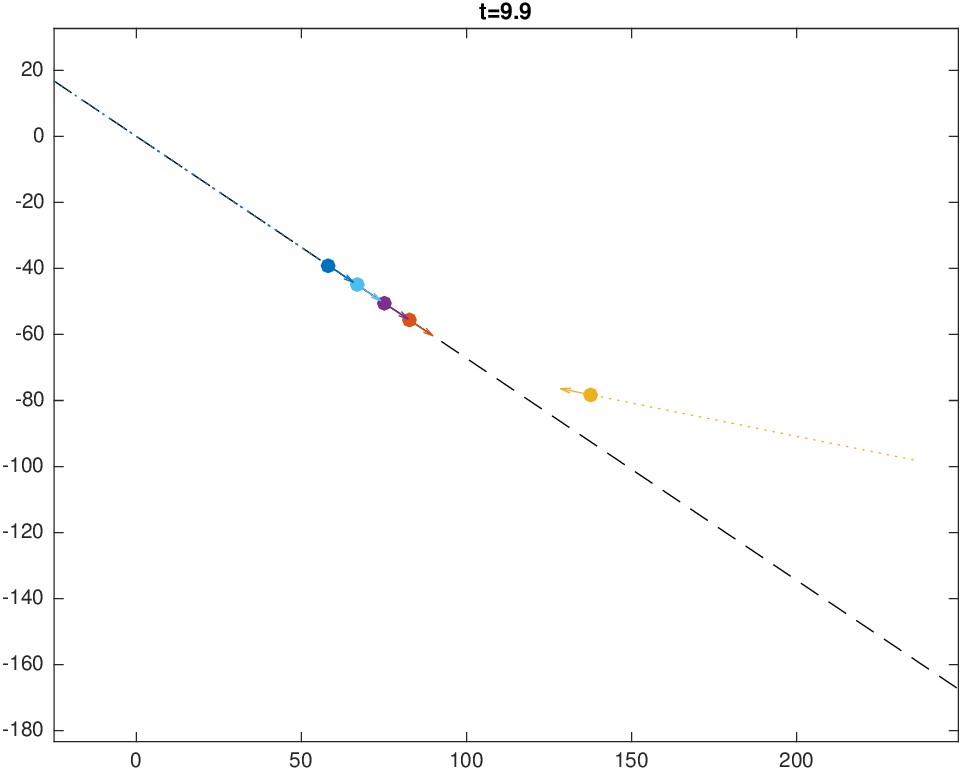
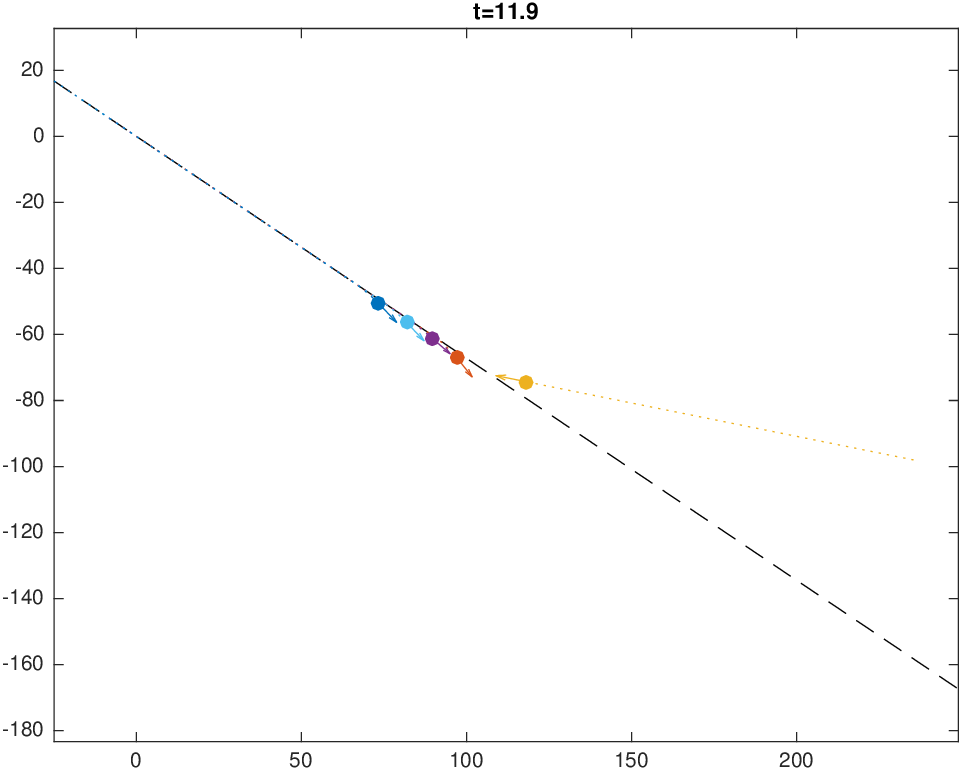
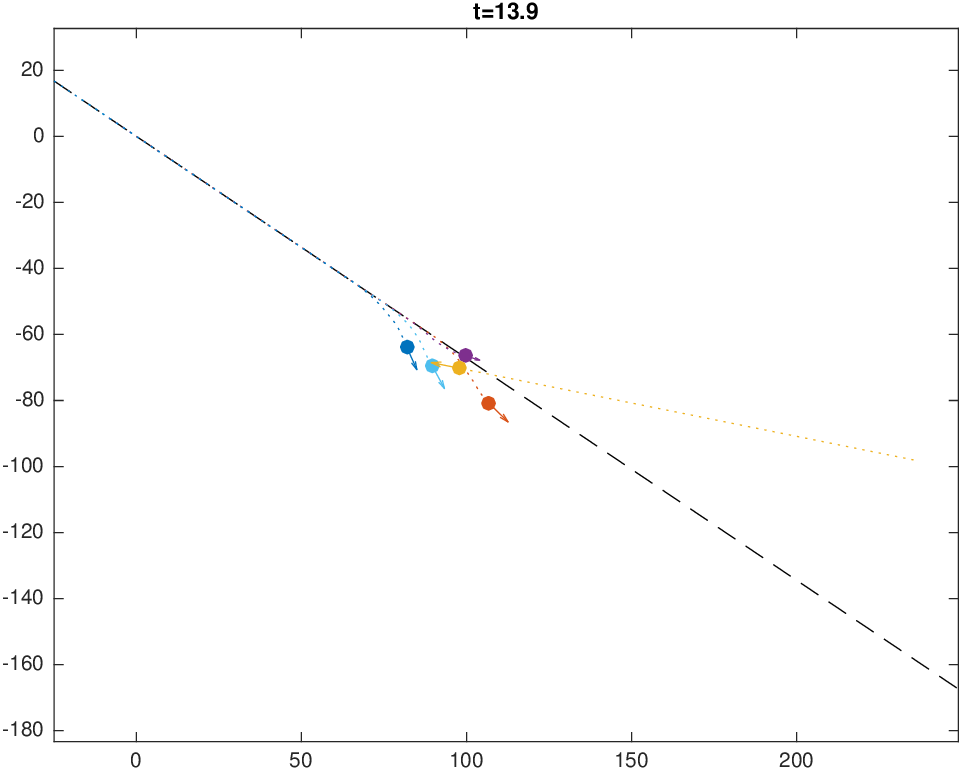
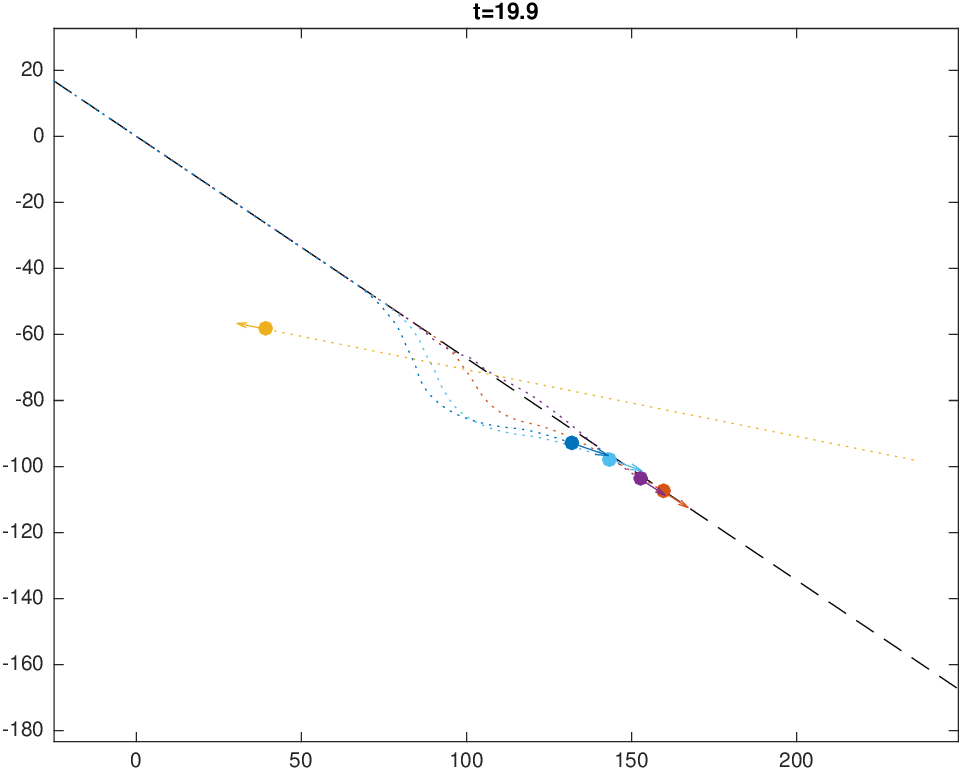
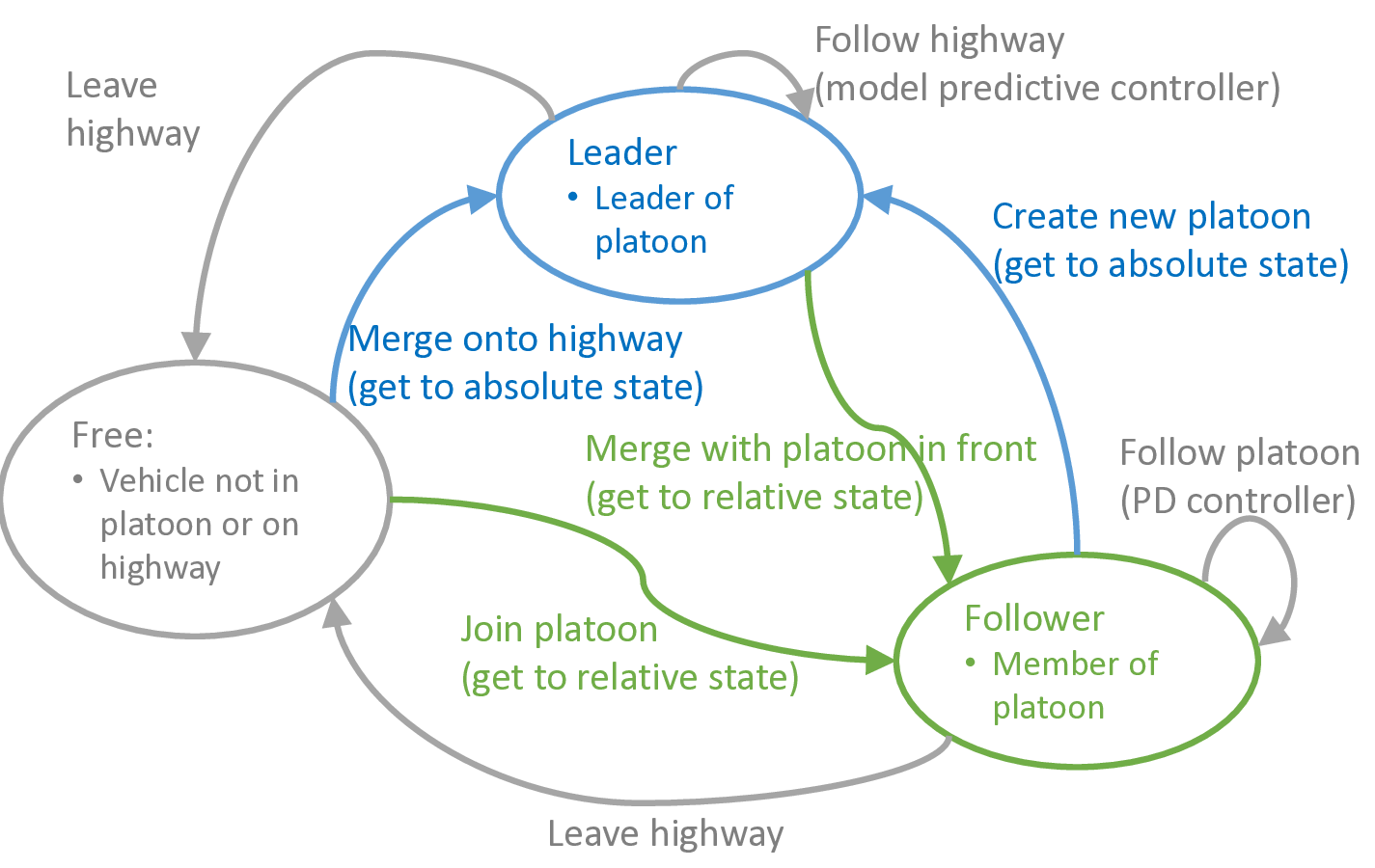
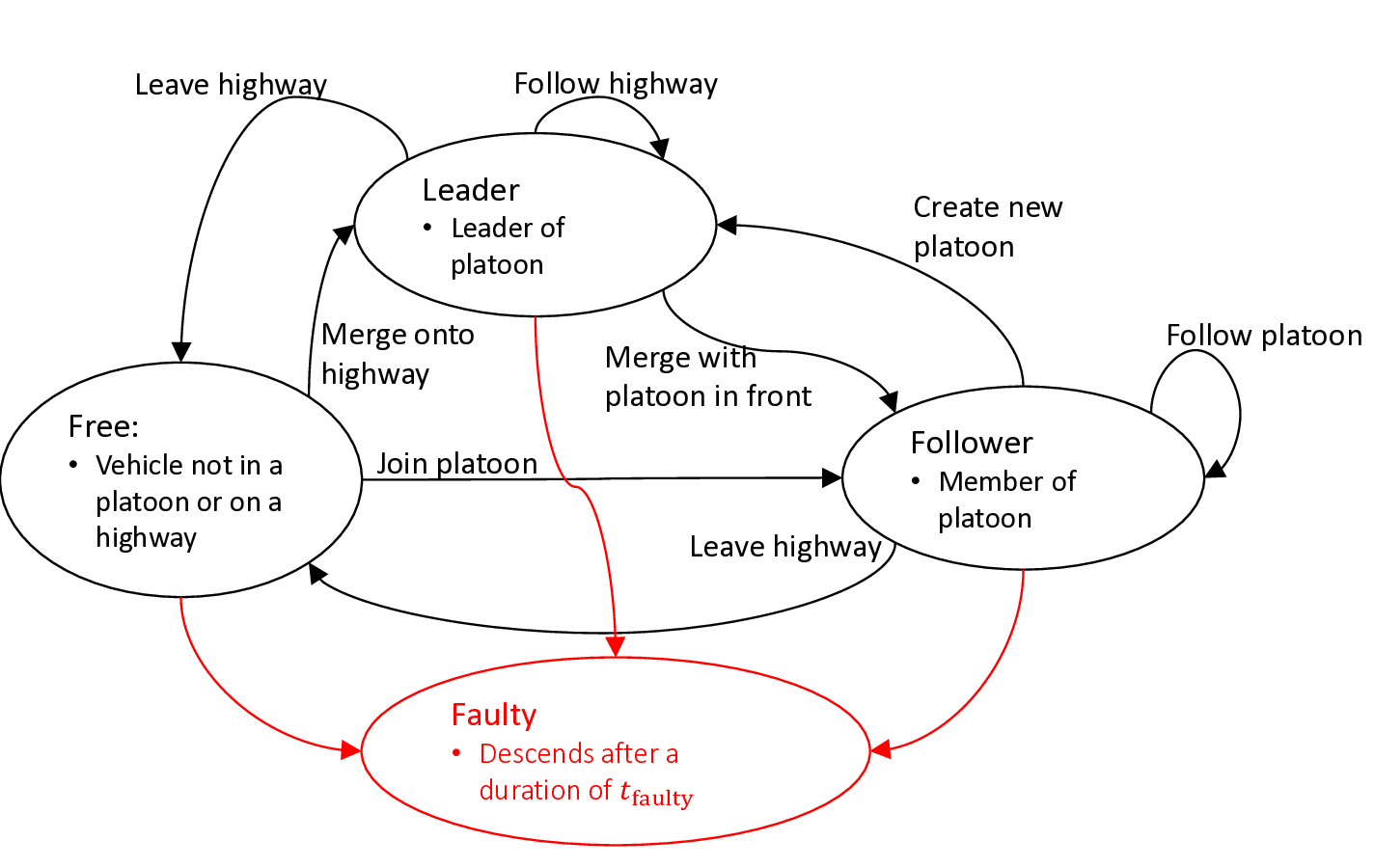
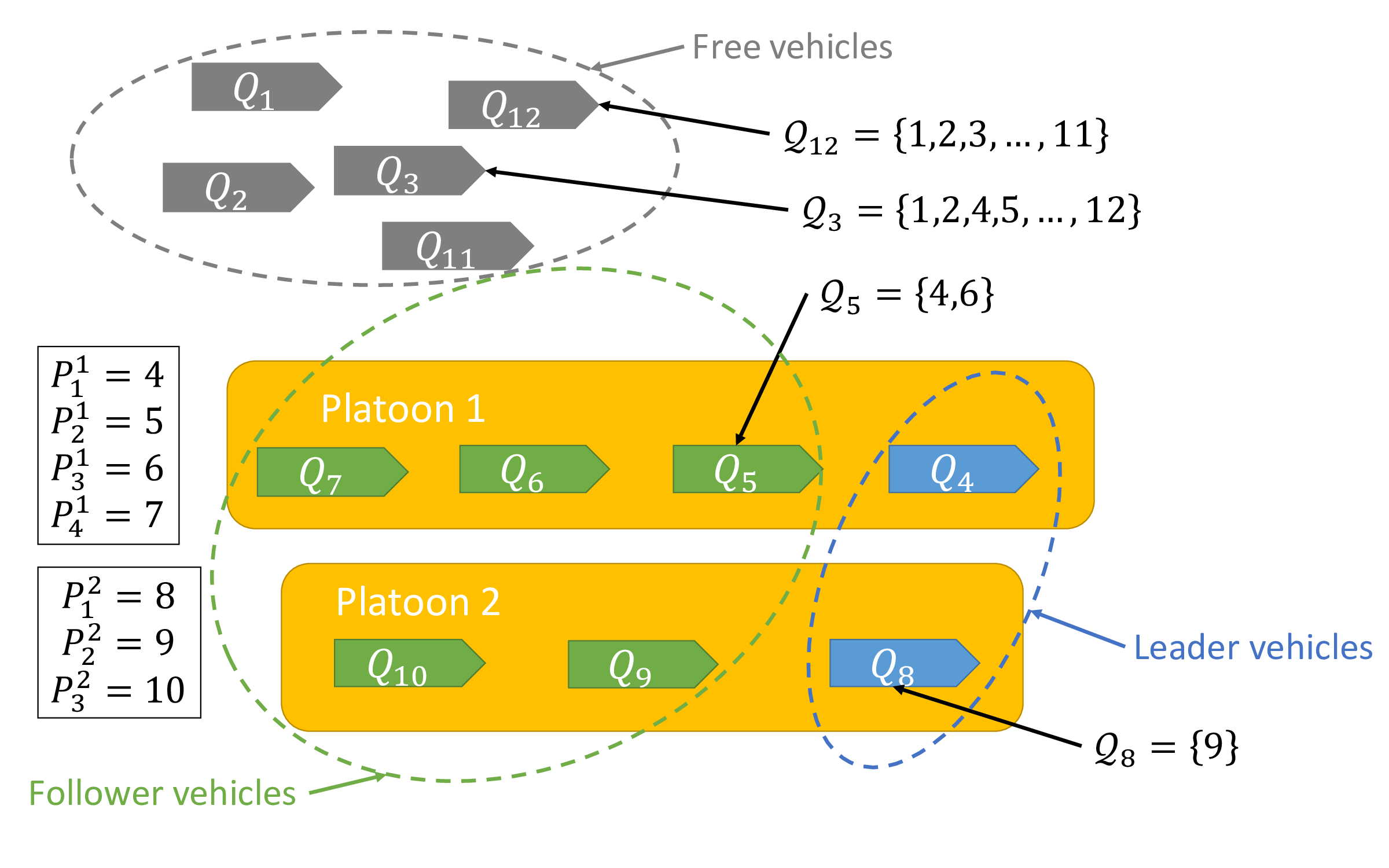
Recently, there has been immense interest in using unmanned aerial vehicles (UAVs) for civilian operations. As a result, unmanned aerial systems traffic management is needed to ensure the safety and goal satisfaction of potentially thousands of UAVs flying simultaneously. Currently, the analysis of large multi-agent systems cannot tractably provide these guarantees if the agents' set of maneuvers is unrestricted. In this paper, platoons of UAVs flying on air highways is proposed to impose an airspace structure that allows for tractable analysis. For the air highway placement problem, the fast marching method is used to produce a sequence of air highways that minimizes the cost of flying from an origin to any destination. The placement of air highways can be updated in real-time to accommodate sudden airspace changes. Within platoons traveling on air highways, each vehicle is modeled as a hybrid system. Using Hamilton-Jacobi reachability, safety and goal satisfaction are guaranteed for all mode transitions. For a single altitude range, the proposed approach guarantees safety for one safety breach per vehicle, in the unlikely event of multiple safety breaches, safety can be guaranteed over multiple altitude ranges. We demonstrate the platooning concept through simulations of three representative scenarios.📄 Full Content
📸 Image Gallery

Reference
This content is AI-processed based on open access ArXiv data.