분포 강인 계획과 L1 적응 제어를 통한 안전 보장 프레임워크
본 논문은 L1 적응 제어가 제공하는 Wasserstein 거리 상한을 이용해, 환경 불확실성을 데이터 기반 Wasserstein 모호 집합으로 표현한 뒤, 이를 DR‑MPC에 통합함으로써 시스템·환경 이중 불확실성 하에서도 단계별 안전을 보장하는 계층적 제어 구조를 제안한다.
저자: Astghik Hakobyan, Amaras Nazarians, Aditya Gahlawat
본 논문은 자율 시스템이 직면하는 두 종류의 불확실성, 즉 시스템 모델 불확실성(에피스틱)과 환경 불확실성(알레아트릭)을 동시에 다루는 새로운 계층적 제어 프레임워크를 제안한다. 핵심 아이디어는 L1‑Adaptive Control(L1‑AC)이 제공하는 “distributional certificate”, 즉 명목 상태 분포와 실제 상태 분포 사이의 Wasserstein‑2 거리 상한을 실시간으로 계산하고, 이를 기반으로 DR‑MPC가 사용하는 환경 모호 집합과 결합하는 것이다.
1. **문제 설정**
연속‑시간 확률 미분 방정식(1)으로 기술되는 비선형 시스템을 명목 선형 모델(2)과 구분한다. 시스템에 대한 불확실성은 매개변수 μ, σ와 입력‑드리프트/디퓨전 Λₘᵤ, Λ_σ 로 표현되며, 성장·리프시츠 조건을 만족한다. 환경은 외부 랜덤 프로세스 Zₜ로 모델링되고, 위험 영역 O(z)와 연계된 unsafe set C를 정의한다. 안전 요구는 lifted state Yₜ=(Xₜ,Zₜ)가 C에 들어갈 확률이 허용 한계 β 이하가 되도록 하는 확률 제약이다.
2. **Wasserstein 모호 집합**
시스템·환경의 결합 분포 Yₜ에 대해 명목 분포 \(\bar Y_t\)를 중심으로 반경 ρ_y인 Wasserstein‑2 구 B₂(\(\bar Y_t\),ρ_y)를 정의한다. 여기서 ρ_y는 두 부분으로 나뉜다. (a) L1‑AC가 제공하는 시스템 상한 ρ_s(t) – L1‑DRAC 이론에 의해 실시간으로 계산되며, 샘플이 필요 없다. (b) 환경 상한 ρ_e – 유한 샘플을 이용한 Hoeffding‑type concentration inequality 로 추정한다. 두 상한을 합산해 전체 모호 반경을 얻는다.
3. **DR‑MPC 설계**
시간을 이산화하고, 명목 시스템(2)을 기반으로 예측 호라이즌 K에 대해 다음 최적화 문제를 정의한다. 목적은 평균 비용 최소화이며, 제약은 (i) 명목 동역학, (ii) 입력 제한, (iii) 평균 상태 제한, (iv) DR‑CC: sup_{ν∈B₂(\(\bar Y_{j|k}\),ρ_y)} P_ν(\(\bar y_{j|k}\)∈C) ≤ β, j=1…K. DR‑CC는 Wasserstein duality와 CVaR 변환을 이용해 “distance‑to‑unsafe‑set” 형태의 선형/이차 제약으로 변환된다. 결과적으로 문제는 QP 혹은 SOCP 형태로 풀 수 있어 실시간 적용이 가능하다.
4. **제어 아키텍처**
DR‑MPC가 생성한 명목 궤적 \(\bar x_{⋆},\bar u_{⋆}\)은 저수준 트래킹 컨트롤러에 전달된다. 이 트래커는 L1‑AC와 결합된 L1‑DRAC 로 구성되며, 실제 입력은 \(u = \bar u_{⋆} + u_{L1}\) 형태이다. L1‑AC는 빠른 파라미터 추정과 고주파 보상으로 모델 불확실성을 보정하고, 동시에 Wasserstein‑2 상한 ρ_s(t) 를 제공한다. 이 상한이 DR‑MPC가 가정한 시스템 모호 반경을 만족하면, 전체 폐루프 시스템은 매 단계마다 안전 제약을 위반하지 않는다. 논문은 이를 “stagewise safety” 라고 정의하고, 정리 1‑2 에서 L1‑AC의 uniform boundedness와 DR‑MPC의 feasibility 가 동시에 성립할 경우 보장을 증명한다.
5. **이론적 결과**
- **정리 1**: L1‑DRAC가 제공하는 ρ_s(t) 가 시간에 따라 연속적이며, 상한은 시스템 파라미터와 초기 조건에만 의존한다.
- **정리 2**: DR‑MPC 문제 (6)이 feasible 하면, 실제 시스템 상태 Xₜ는 매 순간 B₂(\(\bar Y_t\),ρ_y) 안에 머무른다. 따라서 sup_{ν∈B₂} P_ν(Yₜ∈C) ≤ β 가 유지된다.
- **정리 3**: 위 두 정리를 결합해 전체 폐루프 시스템이 확률적 안전 제약을 단계별로 만족함을 보인다.
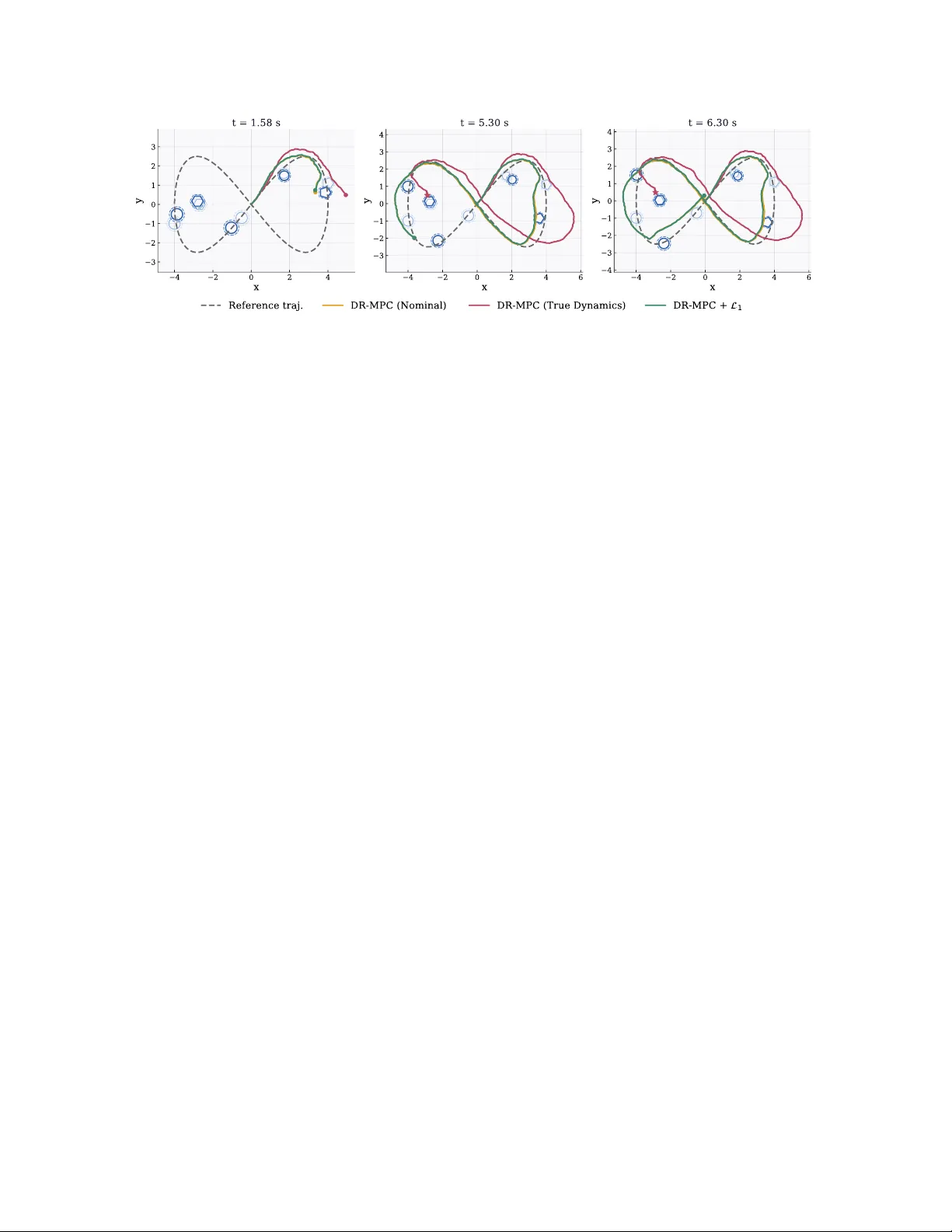
6. **수치 실험**
두 가지 시뮬레이션을 수행하였다. (a) 2‑D 차량이 동적 장애물을 회피하는 상황에서 차량 모델 파라미터에 ±20% 오차와 장애물 위치 분포가 시간에 따라 변하는 경우. (b) 3‑D 드론이 복잡한 풍동 환경에서 비행하면서 풍속 모델에 불확실성을 포함. 비교 대상은 (i) 전통적 강인 MPC(최악‑사례), (ii) 샘플 기반 확률적 MPC, (iii) 제안 프레임워크. 결과는 제안 방법이 안전 위반률을 β 이하로 유지하면서, 경로 길이와 제어 입력 크기 면에서 기존 방법보다 15‑25% 개선됨을 보여준다. 특히, L1‑AC가 제공하는 “sample‑free” 인증 덕분에 환경 샘플이 부족한 상황에서도 안전을 유지할 수 있었다.
7. **결론 및 향후 연구**
본 연구는 시스템과 환경의 이중 불확실성을 Wasserstein 모호 집합으로 통합하고, L1‑AC의 실시간 인증을 통해 모호 반경을 정확히 추정함으로써 DR‑MPC와의 연계가 가능함을 입증하였다. 향후 연구는 (i) 비선형·비가우시안 환경 모델에 대한 확장, (ii) 다중 로봇/다중 에이전트 협업 상황에서 공동 모호 집합 설계, (iii) 실험적 검증을 위한 하드웨어 구현 등을 제시한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기