$\mathcal{L}_1$-Certified Distributionally Robust Planning for Safety-Constrained Adaptive Control
Safe operation of autonomous systems requires robustness to both model uncertainty and uncertainty in the environment. We propose a hierarchical framework for stochastic nonlinear systems that integrates distributionally robust model predictive contr…
Authors: Astghik Hakobyan, Amaras Nazarians, Aditya Gahlawat
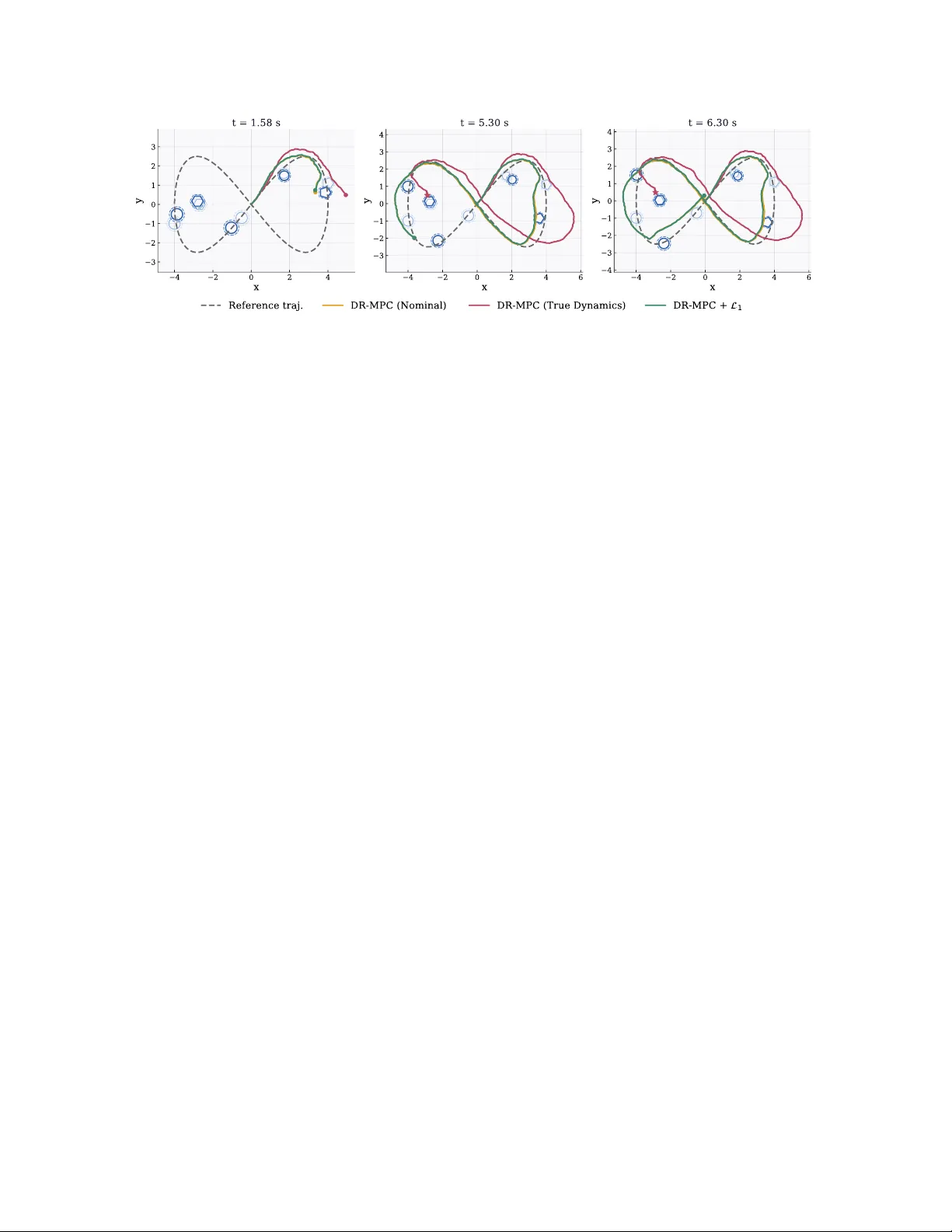
L 1 -Certified Distributionally Robust Planning for Safet y-Constrained Adaptiv e Con trol ∗ Astghik Hak oby an, Amaras Nazarians, Adit y a Gahlaw at, Naira Ho v akim y an, and Ilya Kolmano vsky † Abstract Safe op eration of autonomous systems requires robustness to b oth mo del uncertaint y and uncertain ty in the en vironment. W e prop ose a hierarc hical framew ork for sto c hastic nonlin- ear systems that in tegrates distributionally robust mo del predictive con trol (DR-MPC) with L 1 -adaptiv e con trol. The key idea is to use the L 1 adaptiv e con troller’s online distributional certificates that b ound the W asserstein distance betw een nominal and true state distributions, thereb y certifying the am biguit y sets used for planning w ithout requiring distribution samples. En vironment uncertaint y is captured via data-driv en ambiguit y sets constructed from finite samples. These are incorporated into a DR-MPC planner enforcing distributionally robust c hance constrain ts o ver a receding horizon. Using W asserstein duality , the resulting problem admits tractable reform ulations and a sample-based implemen tation. W e sho w theoretically and via numerical experimentation that our framework ensures certifiable safety in the presence of simultane ous system and envir onment unc ertainties. 1 In tro duction Certifiably safe op eration of autonomous systems under uncertain ty remains a fundamen tal c hal- lenge in control. Real-w orld systems are sub ject to b oth epistemic uncertain ty from imp erfect system and en vironment knowledge and ale atoric uncertain ty due to exogenous random distur- bances. Consequen tly , the system b eha vior can deviate unquantifiably from nominal predictions, making it c hallenging to obtain safety guaran tees, if not infeasible. Existing approac hes face a fundamen tal trade-off betw een robustness guarantees and practical p erformance. Classical robust and adaptiv e con trol methods [1 – 4] ensure stability under b ounded uncertain ty but rely on worst-case analysis, leading to conserv ativ e b ehavior. Instead, one can study a verage-case (or high-probabilit y) sto chastic safety guaran tees to alleviate the conserv ativ eness, since one then analyzes distributions and their asso ciated statistical properties rather than solely their supports. Suc h represen tations allo w con trol synthesis at the lev el of state distributions and ∗ This w ork w as supp orted in part b y the Higher Education and Science Committee of RA (Research pro ject 24FP-C017), Air F orce Office of Scientific Research (AFOSR) Grant F A9550-25-1-0274, and by the National Science F oundation (NSF) under Gran ts CMMI 2135925, I IS 2331878, and CPS 2311085. † A. Hak oby an is with the Center for Scien tific Innov ation and Education and National P olytec hnic Universit y of Ar- menia, Y erev an, Armenia astghik.hakobyan@csie.am . A. Gahla w at and N. Ho v akimy an are with the Departmen t of Mec hanical Science and Engineering, Grainger College of Engineering, Universit y of Illinois at Urbana-Champaign, Urbana, IL, USA { gahlawat, nhovakim } @illinois.edu . A. Nazarians is with the Center for Scien tific Inno- v ation and Education and American Universit y of Armenia, Y erev an, Armenia amaras nazarians@edu.aua.am . I. Kolmanovsky is with the Department of Aerospace Engineering, Universit y of Michigan, Ann Arb or, MI, USA. ilya@umich.edu . 1 Figure 1: Overview of the proposed framework. A DR-MPC planner generates nominal tra jectories satisfying safet y constrain ts, which are trac ked by a baseline con troller augmented with an L 1 - adaptiv e term for fast uncertain ty comp ensation. The adaptive la yer certifies that the true state distribution remains within a prescrib ed W asserstein tube around the nominal distribution. are amenable to data-driven approaches [5, 6]. Despite their strong empirical p erformance, data- driv en approaches lack robustness guarantees and are sensitiv e to distribution shifts, limiting their applicabilit y to safet y-critical systems. The distributional p ersp ectiv e of operating directly in the space of probabilit y measures offers p oten tial approac hes to robustness against distribution shifts caused by uncertaint y . Am biguity sets [7 – 9] that capture the effects of uncertainties enable safet y enforcement through c hance or con- ditional v alue-at-risk (CV aR) constrain ts [10 – 13]. This p erspective has led to distributionally robust con trol metho dologies [14 – 17]. Distributionally robust mo del predictive con trol (DR-MPC) [18 – 21] pro vides a natural receding-horizon form ulation. Ho wev er, assuming the existenc e and know le dge of unc ertainty-induc e d ambiguity sets is a key limitation of DR-MPC . If samples from the underlying distributions are av ailable, probabilistic am biguity sets ma y b e constructed [7, 22, 23]. While obtaining samples from the en vironment in whic h a system op erates is feasible, obtaining multiple samples from the system’s time-v arying state distributions is not. At each time p oin t, the control law receives only the current feedback signal, a single sample, from a state distribution that changes o ver time. Therefore, it is imp ossible to collect m ultiple indep endent samples from an y sp ecific state distribution. As a result, there is no mechanism to c ertify that the true (unc ertain) close d-lo op system r emains within the ambiguity set use d for planning , and safety guarantees ma y not hold under uncertain system dynamics. In order to enforce the existence of ambiguit y sets of known a priori ambiguit y sets, our formu- lation uses the L 1 -adaptiv e con trol ( L 1 -A C), a robust adaptiv e con troller that guarantees uniformly b ounded state deviations of systems under epistemic uncertain ties and has b een successfully imple- men ted on platforms lik e the NASA’s AirStar 5.5% subscale generic transp ort aircraft mo del [24], and Calspan’s Learjet [25]. The robustness guarantees of L 1 -A C for uncertain systems hav e b een lev eraged for data-driven approaches for robust reinforcemen t learning [26], safe learning-based con trol [27], [28], and also com bined with mo del predictiv e control (MPC) to achiev e tra jectory- lev el robustness [29 – 31]. In particular, the recently dev elop ed L 1 -distributionally robust adaptiv e con trol ( L 1 -DRA C) [32] establishes finite-time W asserstein b ounds b etw een nominal and true state distributions, defining W asserstein am biguity tubes used in cov ariance steering [33]. These prelimi- nary fora ys, along with the previously men tioned DR-MPC approac hes, either incorp orate planning without c ertifiable guar ante es , or are inc ap able of ensuring safety under simultane ous mo del and en- vir onment unc ertainty W e th us prop ose a framew ork, illustrated in Fig. 1, that closes the lo op b etwe en planning and adaptation thr ough distributional c ertific ates . Our framew ork is designed for a very general scenario: guaran teed safe op eration of systems sub ject to b oth mo del and en vironment uncer- tain ties. W e formulate safety certificates in terms of joint system–environmen t distributions. Our framew ork relies on a bidirectional communication: the DR-MPC comm unicates reference com- mands to the do wnstream L 1 -DRA C and the latter comm unicates sample-free guarantees of the W asserstein b ounds b et w een nominal and true (uncertain) state distributions, thereby certifying the system ambiguit y set used for planning. Additionally , the environmen t uncertain t y is captured via data-driven ambiguit y sets. These are integrated within a DR-MPC planner that enforces distri- butionally robust chance constrain ts (DR-CCs). W e sho w that feasibilit y of the resulting DR-MPC problem, together with the L 1 -DRA C certificate, guar ante es stagewise safety of the true close d-lo op system . The main con tributions of this pap er are as follo ws: • A hierarc hical DR-MPC framework that couples planning and adaptation via a join t W asser- stein ambiguit y set, where the a priori known system ambiguit y radius is certified online using L 1 -A C without distribution samples, and the en vironmen t radius is obtained via finite-sample concen tration bounds; • A closed-lo op distributional certification mec hanism that enables pr ovable stagewise safety guar ante es for the true system under simultaneous mo del and environmen t uncertaint y; and • A tractable and geometry-agnostic reform ulation of DR-CCs using CV aR and W asserstein dualit y , based on distance-to-set representations, enabling a sample-based DR-MPC imple- men tation. W e provide numerical exp erimen tation that v alidates certified safety of system operation under b oth mo del mismatch and environmen t uncertaint y . The pap er is organized as follows: Section 2 introduces the system and the environmen t, and also the safety certificates w e seek. Section 3 presen ts the prop osed framew ork, and Section 4 dev elops a tractable DR-MPC reformulation . Finally , Section 5 provides the results of numerical exp erimen tation. 2 Preliminaries 2.1 Notation Let R ≥ 0 denote the set of nonnegative real num b ers and N the set of p ositiv e integers. F or a v ector x ∈ R n , ∥ x ∥ denotes the Euclidean norm, and for a matrix A , ∥ A ∥ F denotes the F robenius norm. W e denote by P q ( Y ) the set of probability measures on Y with finite q -th moments. The la w of a random v ariable X is denoted by L ( X ). F or probability measures µ and ν , µ ⊗ ν denotes their pro duct measure. 2.2 Uncertain System Dynamics W e consider a sto c hastic dynamical system where the state pro cess X t ∈ R n ev olves according to the Itˆ o sto chastic differen tial equation dX t = ( A µ X t + B U t + B Λ µ ( t, X t )) dt + ( A σ + B Λ σ ( t, X t )) dW t , X 0 ∼ ξ 0 , (1) where W t ∈ R d is a d -dimensional Brownian motion with respect to the filtration {F t } , and U t ∈ R m is a feedbac k control input to b e sp ecified later. The con trol pro cess U t is assumed to b e F t -adapted. All sto c hastic processes are defined on a filtered probabilit y space (Ω , F , {F t } t ≥ 0 , P ) satisfying the usual conditions. The matrices A µ ∈ R n × n , A σ ∈ R n × d , and B ∈ R n × m are kno wn and describ e the nominal linear dynamics, where B is assumed to b e full rank. The functions Λ µ : R ≥ 0 × R n → R m and Λ σ : R ≥ 0 × R n → R m × d represen t unkno wn matc hed drift and diffusion terms entering through the input channel. As a reference mo del, we consider the uncertain t y-free nominal mo del d ¯ X t = ( A µ ¯ X t + B ¯ U t ) dt + A σ d ¯ W t , ¯ X 0 ∼ ¯ ξ 0 , (2) where ¯ X t ∈ R n is the nominal state pro cess and ¯ W t ∈ R d is a Bro wnian motion adapted to { ¯ F t } indep enden t of W t . Similarly , the initial distributions ξ 0 and ¯ ξ 0 are indep endent. W e denote the corresp onding probabilit y la ws by X t := L ( X t ) and ¯ X t := L ( ¯ X t ). Assumption 1 (Uncertaint y regularity) . The functions Λ µ and Λ σ satisfy the gr owth b ounds ∥ Λ µ ( t, x ) ∥ 2 ≤ ∆ 2 µ 1 + ∆ 2 µ 2 ∥ x ∥ 2 ∀ ( t, x ) ∈ R ≥ 0 × R n and ∥ Λ σ ( t, x ) ∥ 2 F ≤ (∆ 2 σ 1 + ∆ 2 σ 2 ∥ x ∥ 2 ) 1 / 2 , ∀ ( t, x ) ∈ R ≥ 0 × R n , wher e ∆ µ 1 , ∆ µ 2 , ∆ σ 1 , ∆ σ 2 > 0 ar e known c onstants. Mor e over, Λ µ is glob al ly Lipschitz in ( t, x ) , i.e., ∥ Λ µ ( t, x ) − Λ µ ( t ′ , x ′ ) ∥ ≤ ˆ L µ | t − t ′ | + L µ ∥ x − x ′ ∥ , ∀ ( t, t ′ , x, x ′ ) ∈ R ≥ 0 × R ≥ 0 × R n × R n , while Λ σ is Lipschitz in time and H¨ older c ontinuous with exp onent 1 / 2 in the state variable, i.e., ∥ Λ σ ( t, x ) − Λ σ ( t ′ , x ′ ) ∥ F ≤ ˆ L σ | t − t ′ | + L σ ∥ x − x ′ ∥ 1 / 2 , ∀ ( t, t ′ , x, x ′ ) ∈ R ≥ 0 × R ≥ 0 × R n × R n . Assumption 1 imp oses standard growth and regularit y conditions ensuring w ell-p osedness of (1) and finite state moments. The matched structure is consistent with the L 1 -A C framew ork and enables the deriv ation of distributional b ounds. Under this assumption, (1)– (2) admit unique strong solutions. 2.3 En vironmen t and Safet y Sp ecification W e consider a stochastic dynamical system operating in an uncertain dynamic environmen t. The en vironment is mo deled by an exogenous random pro cess Z t ∈ R n z , which represents external uncertain ty (e.g., obstacle states in motion planning applications). W e assume that unsafe regions are induced b y the en vironmen t through a set-v alued mapping O : R n z ⇒ R n , suc h that O ( z ) is a closed subset of R n for all z ∈ R n z . The corresp onding random unsafe region is O ( Z t ). The process { Z t } is assumed to b e exogenous and indep enden t of the system state process { X t } . Its probabilit y law Z t := L ( Z t ) is unkno wn in practice, and w e instead assume access to a nominal distribution ¯ Z t , obtained from historical observ ations or samples generated by an environmen t prediction mo del. T o describ e safety in a unified manner, we in tro duce the lifted random v ariable Y t := ( X t , Z t ) ∈ Y := R n × R n z , and define the lifted unsafe set C := { ( x, z ) ∈ R n × R n z : x ∈ O ( z ) } . The unsafe ev en t can then b e written equiv alently as Y t ∈ C . Accordingly , the safet y requiremen t can b e expressed through the c hance constraint P ( Y t ∈ C ) ≤ β , (3) where β ∈ (0 , 1) denotes the allo w able violation probability . Since b oth the system and environmen t states are uncertain and their true probability laws are unkno wn, the probabilit y law of Y t is generally unav ailable. Consequen tly , direct ev aluation of (3) is intractable. 2.4 W asserstein Ambiguit y Set T o accoun t for distributional uncertain ty , we adopt a distributionally robust form ulation based on W asserstein ambiguit y sets in the lifted state space. Using the lifted v ariable Y t , and under the indep endence assumption b et ween the system and environmen t pro cesses, the lifted la w satisfies Y t = X t ⊗ Z t . Similarly , we define the nominal lifted v ariable ¯ Y t := ( ¯ X t , ¯ Z t ), whose nominal law is given by the pro duct measure ¯ Y t = ¯ X t ⊗ ¯ Z t , under the modeling assumption that the nominal system and en vironmen t state pro cesses are independent. Let ( Y , d Y ) b e the metric space where Y := R n × R n z and d Y is the Euclidean metric on Y , i.e., d Y (( x, z ) , ( x ′ , z ′ )) := ∥ ( x, z ) − ( x ′ , z ′ ) ∥ . F or t wo probability measures µ, ν ∈ P q ( Y ), the W asserstein distance of order q ≥ 1 is defined as W q ( µ, ν ) = inf π ∈ Π( µ,ν ) Z Y ×Y d Y ( y , ¯ y ) q dπ ( y , ¯ y ) 1 /q , where Π( µ, ν ) denotes the set of couplings with marginals µ and ν [7, 9]. W e define the W asserstein am biguit y set around some distribution ν ∈ P q ( Y ) as B q ( ν, ρ ) := { µ ∈ P q ( Y ) | W q ( µ, ν ) ≤ ρ } , (4) where ρ > 0 denotes the ambiguit y radius. These ambiguit y sets capture uncertaint y in the joint distribution of the system and environ- men t states. Accordingly , we enforce the safety constrain ts robustly o ver all probability measures con tained in the W asserstein ball B q ( ¯ Y t , ρ y ). In particular, w e imp ose DR-CC, the distributionally robust counterpart of (3) as follows: sup ν t ∈ B 2 p ( ¯ Y t ,ρ y ) P ν t ( Y t ∈ C ) ≤ β , (5) whic h b ounds the w orst-case probabilit y of violating the safety constraint ov er the am biguity set, where Y t ∼ ν t denotes the lifted random v ariable. Remark 1. The extension to multiple envir onment c omp onents (e.g., multiple obstacles) is r e adily obtaine d by intr o ducing variables { Z ( i ) t } n o i =1 and enfor cing one distributional ly r obust c onstr aint of the form (5) for e ach c omp onent. 3 Distributionally Robust Safet y with L 1 Certificate Ensuring that the uncertain system (1) satisfies (3) is c hallenging: the true state distribution devi- ates from nominal due to mo del mismatc h, while the en vironment distribution m ust b e estimated from data. W e address b oth through the hierarchical architecture in Fig. 1: a DR-MPC planner enforces DR-CCs o v er joint W asserstein ambiguit y sets, while an L 1 -adaptiv e lay er compensates for mo del uncertain ty online and pro vides a certificate for the system ambiguit y set used in planning. T ogether, these comp onen ts imply stagewise safety of the true closed-lo op system. 3.1 Distributionally Robust Planner T o construct a nominal tra jectory satisfying the safety constraints, we discretize the nominal sys- tem (2) with sampling time ∆ t > 0 and define t k := t 0 + k ∆ t . Let ¯ x k : = ¯ X t k and ¯ u k : = ¯ U t k denote the sampled nominal state and con trol input, respectively . Under the zero-order-hold input ¯ U t = ¯ u k for t ∈ [ t k , t k +1 ), the nominal system admits the discrete-time dynamics ¯ x k +1 = A d ¯ x k + B d ¯ u k + ¯ w k , where A d and B d are the standard contin uous-to-discrete system matrices, and ¯ w k ∼ N (0 , Σ d ) is an i.i.d. Gaussian noise sequence induced by the contin uous-time diffusion term; see, e.g., [34, 35]. A t time t k , o ver a prediction horizon K ∈ N , w e define the predicted control sequence ¯ u k = { ¯ u j | k } K − 1 j =0 and predicted state sequence ¯ x k = { ¯ x j | k } K j =0 , with corresp onding probability laws { ¯ X j | k } K j =0 . A t each prediction step j , we further define the nominal lifted distribution ¯ Y j | k := ¯ X j | k ⊗ ¯ Z j | k with ¯ Z j | k : = L ( ¯ z j + k ). Giv en an initial state x , we consider the follo wing finite-horizon DR-MPC problem: min ¯ U k , ¯ X k K − 1 X j =0 E ℓ j ( ¯ x j | k , ¯ u j | k ) + E ℓ N ( ¯ x K | k ) (6a) s.t. ¯ x j +1 | k = A d ¯ x j | k + B d ¯ u j | k + ¯ w j | k , j = 0 , . . . , K − 1 , (6b) ¯ u j | k ∈ U , j = 0 , . . . , K − 1 , (6c) E [ ¯ x j | k ] ∈ X , j = 1 , . . . , K , (6d) ¯ x 0 | k = x, (6e) sup ν j ∈ B 2 p ( ¯ Y j | k ,ρ y ) P ν j ¯ y j | k ∈ C ≤ β , j = 1 , . . . , K , (6f ) where ℓ j : R n × R m → R and ℓ N : R n → R denote the stage and terminal costs, resp ectiv ely . Throughout the pap er, w e adopt quadratic costs of the form ℓ ( x, u ) = x ⊤ Qx + u ⊤ Ru and ℓ N ( x ) = x ⊤ Q f x , where Q ⪰ 0, R ≻ 0, and Q f ⪰ 0 are weigh ting matrices. Constrain t (6b) enforces the nominal discrete-time dynamics, where { ¯ w j | k } is an i.i.d. Gaus- sian sequence with distribution N (0 , Σ d ). Since the predicted state ¯ x j | k is sto c hastic, hard state constrain ts are generally in tractable to enforce almost surely . W e therefore impose the mean con- strain t (6d), which is a standard tractable relaxation in sto c hastic MPC. Constrain t (6c) imp oses input admissibility . Finally , (6f) enforces distributionally robust safety b y requiring that the w orst- case probabilit y of the lifted state entering C remain b elow β ov er all probabilit y measures in the W asserstein am biguity set, where ¯ y j | k ∼ ν j 1 . F or each initial state x , let ¯ u ⋆ k ( x ) : = { ¯ u ⋆ 0 | k ( x ) , . . . , ¯ u ⋆ K − 1 | k ( x ) } denote an optimizer of (6), and let ¯ x ⋆ k ( x ) : = { ¯ x ⋆ 0 | k ( x ) , . . . , ¯ x ⋆ K | k ( x ) } b e the asso ciated optimal nominal state tra jectory . The MPC la w induced b y (6) is defined as the first element of the optimal input sequence, κ MPC ( x ) := ¯ u ⋆ 0 | k ( x ) . Th us, although (6) is p osed as an op en-loop finite-horizon optimization, its rep eated solution in receding-horizon fashion induces an implicit state-feedbac k la w. 1 The DR chance constraint (5) is stated in contin uous time for generality , but is enforced in the MPC problem at the discrete prediction times t k + j using the lifted v ariables ¯ y j | k . A t each planning step k , given the measured true state x k : = X t k , the planner solv es the DR-MPC problem (6) with x = ¯ x k and computes the optimal nominal state-input tra jectory { ( ¯ x ⋆ j | k ( x k ) , ¯ u ⋆ j | k ( x k )) } K − 1 j =0 . The resulting nominal reference is then passed to a low-lev el tracking con troller. 3.2 Con trol Arc hitecture The DR-MPC planner in (6) generates a nominal tra jectory for the nominal mo del (2). This tra jectory is track ed at the lo w level b y a baseline feedback con troller. Sp ecifically , we adopt the affine tracking la w κ trk ,t ( x ) = ¯ U pl t − K fb ( x − ¯ X pl t ) , (7) where K fb ∈ R m × n is a constant gain, and ( ¯ X pl t , ¯ U pl t ) denotes the state-input reference provided b y the planner. Using the DR-MPC planner from Section 3.1, at eac h planning time t k = t 0 + k ∆ t w e set ¯ U pl t = ¯ u ⋆ 0 | k ( x k ) , ¯ X pl t = ¯ x ⋆ 0 | k ( x k ) , t ∈ [ t k , t k +1 ) , under a zero-order-hold implementation. Equiv alen tly , ¯ U pl t = κ MPC ( x k ) on [ t k , t k +1 ). W e imp ose the following assumption on the baseline con troller. Assumption 2. The fe e db ack gain K fb is chosen such that A µ − B K fb is Hurwitz. Under Assumption 2, the nominal tracking error dynamics are exp onen tially stable, so that deviations b et w een the nominal reference tra jectory and the trac ked tra jectory remain b ounded. This prop erty will later b e used to derive b ounds on the W asserstein distance b etw een the true state distribution X k and the nominal state distribution ¯ X k . Ho wev er, the true system evolv es according to the uncertain dynamics (1). As a result, the baseline controller alone ma y not be sufficien t to compensate for the unknown drift and diffusion terms, and the true tra jectory ma y deviate significan tly from the planned one. T o mitigate this effect, w e augment the baseline trac king controller with an L 1 -adaptiv e com- p onen t that comp ensates for mo del uncertain t y while preserving the nominal closed-lo op b eha vior. The control applied to the true system is therefore giv en by U t = κ trk , t ( X t ) + U L 1 ,t , t ≥ 0 , (8) where U L 1 ,t denotes the adaptiv e control signal. F ollowing the standard L 1 arc hitecture (see, e.g., [36]), the adaptiv e con troller consists of a state predictor, an adaptation law, and a low-pass filter. Let T s > 0 denote the adaptation sampling p eriod, and let t ∈ [ iT s , ( i + 1) T s ). Sp ecifically , the state predictor is given b y ˙ ˆ X t = A µ ˆ X t + B ( U t + ˆ Λ t ) − λ s ˜ X t , with initial condition ˆ X 0 = X 0 , where ˆ X t ∈ R n is the predictor state, ˜ X t := ˆ X t − X t is the prediction error, λ s > 0 is the adaptation gain, and ˆ Λ t denotes the adaptiv e estimate of the matc hed uncertain t y . The adaptive estimate is up dated according to a piecewise-constant law and pro jected on to the matc hed input channel, i.e., uncertain t y entering through the input matrix B . In particular, w e set ˆ Λ t = λ s 1 − e λ s T s − 1 Θ ad ˜ X iT s , t ∈ [ iT s , ( i + 1) T s ) , i ≥ 0 , with initialization ˆ Λ t = 0 m for 0 ≤ t < T s . Here, Θ ad = [ I m 0 m,n − m ] ¯ B − 1 ∈ R m × n , where ¯ B = [ B B ⊥ ] ∈ R n × n and B ⊥ is chosen suc h that Im( B ⊥ ) = k er( B ⊤ ) and rank( ¯ B ) = n . The resulting adaptiv e input is generated b y the lo w-pass filter U L 1 ,t = − ω Z t 0 e − ω ( t − ν ) ˆ Λ ν dν, (9) where ω > 0 denotes the filter bandwidth. The L 1 arc hitecture rapidly comp ensates for matc hed uncertaint y while ensuring that the closed- lo op system remains close to the nominal dynamics. This prop erty enables the deriv ation of distri- butional certificates that quantify the deviation b etw een the true and nominal state distributions. 3.3 Distributional Certificates and Closed-Lo op Safet y W e no w formalize the distributional guarantees pro vided by the L 1 arc hitecture. The following result, shown in [32, Thm. 4.1], establishes that the adaptive controller b ounds the W asserstein distance b et ween the true and nominal state distributions. Theorem 1. Supp ose Assumptions 1 and 2 hold, and let the c ontr ol input b e given by (8) . In addition, assume ¯ ξ 0 ∼ P 2 p ⋆ ( R n ) for some p ⋆ ∈ N , p ⋆ ≥ 1 . Then ther e exists a known c onstant ρ x > 0 such that X t ∈ B 2 p ( ¯ X t , ρ x ) , ∀ t ≥ 0 , for every p ∈ { 1 , . . . , p ⋆ } . Theorem 1 sho ws that the adaptive con troller keeps the true state distribution within a W asser- stein ball around the nominal distribution, thereby certifying the system-side ambiguit y set used for planning. While this result characterizes the uncertaint y in the system state, the en vironment state distribution is typically unkno wn and must b e estimated from data. The follo wing lemma pro vides a finite-sample b ound on the W asserstein distance b et w een the true environmen t state distribution and its empirical estimate. Lemma 1. L et ¯ Z t denote the empiric al distribution c onstructe d fr om N i.i.d. samples of Z t . As- sume that Z t is light-taile d in the sense that ther e exist c onstants α > 2 p and A > 0 such that E [exp( ∥ Z t ∥ α )] ≤ A . Then ther e exist c onstants c 1 , c 2 > 0 dep ending only on α , A , and n z such that for any c onfidenc e level δ z ∈ (0 , 1) , P N W 2 p Z t , ¯ Z t ≤ ρ z ( N , δ z ) ≥ 1 − δ z , wher e P N is taken with r esp e ct to the N indep endent samples of envir onment state and ρ z ( N , δ z ) = log( c 1 /δ z ) c 2 N min { 2 p n z , 1 2 } if N ≥ log( c 1 /δ z ) c 2 , log( c 1 /δ z ) c 2 N 2 p α otherwise. Lemma 1 follows from concentration inequalities for the W asserstein distance established in the distributionally robust optimization literature [7, 8, 37]. T ogether, Theorem 1 and Lemma 1 bound the deviation b et ween the true and nominal system and environmen t state distributions. These b ounds determine the am biguity radii used b y the distributionally robust planner. Theorem 2. L et Assumptions 1 and 2 hold, let the c ontr ol input b e given by (8) , and fix β ∈ (0 , 1) and δ z ∈ (0 , 1) . Supp ose the DR-MPC planner (6) is fe asible at t k with ambiguity r adius ρ y = ρ x + ρ z , wher e ρ x and ρ z ≥ ρ z ( N , δ z ) ar e given by The or em 1 and L emma 1, r esp e ctively. Then, for e ach sampling time t k , the fol lowing pr op erty holds for the true close d-lo op system: P ( X t k / ∈ O ( Z t k )) ≥ 1 − β (10) with pr ob ability at le ast 1 − δ z with r esp e ct to the envir onment data. The pro of is pro vided in App endix A. 2 Remark 2. The additive structur e of ρ y arises fr om worst-c ase c oupling ar guments and the triangle ine quality for the Wasserstein distanc e, and ensur es r obustness under indep endent unc ertainties. Tighter ambiguity sets may b e obtaine d by exploiting additional structur e or dep endenc e b etwe en X t and Z t , which we le ave for futur e work. Theorem 2 shows that the L 1 certificate and empirical W asserstein b ounds together yield a stagewise safet y guarantee at eac h feasible planning step. The adaptive contr oller b ounds the deviation b et ween true and nominal state distributions, while the concentration result b ounds the en vironment distribution deviation. T ogether, these determine the ambiguit y radii that ensure the c hance constrain t (10) holds at each step where the planner is feasible. 4 T ractable Reform ulation of the DR-MPC Problem The DR-MPC problem in (6) con tains DR-CC that are not directly amenable to online computation. In this section, w e derive a tractable reformulation that replaces these constrain ts with equiv alent CV aR conditions under the nominal distribution. The k ey idea is to measure safet y through the distance to the collision set and to exploit W asserstein duality to con vert the w orst-case probabilit y constrain t in to a deterministic exp ectation constraint. 4.1 CV aR Reformulation of the DR-CC T o obtain a tractable reformulation of (5), we consider a fixed time t and inv oke the standard strong duality result for W asserstein distributionally robust optimization [9, 38]. Lemma 2. L et ( Y , d Y ) b e a Polish sp ac e, let ¯ Y t ∈ P 2 p ( Y ) , and let ℓ : Y → R b e Bor el me asur able with ℓ ∈ L 1 ( ¯ Y t ) . Then sup ν t ∈ B 2 p ( ¯ Y t ,ρ y ) E ν t [ ℓ ( Y t )] = inf γ ≥ 0 γ ρ 2 p y + E ¯ Y ∼ ¯ Y t ¯ ℓ γ ( ¯ Y ) , wher e ¯ ℓ γ ( ¯ y ) : = sup y ∈Y ℓ ( y ) − γ d Y ( y , ¯ y ) 2 p . W e next sp ecialize this dual represen tation to our setting. In this case, the inner supremum dep ends only on the distance betw een the nominal sample ¯ y and the collision set C . This observ ation 2 Theorem 2 guaran tees constraint satisfaction at each step for which (6) is feasible, but do es not ensure recursive feasibilit y . If the DR-MPC problem b ecomes infeasible at some t k , the guaran tee no longer applies. Establishing recursiv e feasibility w ould require additional terminal ingredients, such as a distributionally robust terminal set and terminal con troller, which we leav e for future work. yields an equiv alent CV aR c haracterization of the DR-CC. Sp ecifically , for a random v ariable X ∼ P and risk lev el β ∈ (0 , 1), the CV aR is defined as CV aR P β ( X ) = inf η ∈ R η + 1 β E P [( X − η ) + ] . (11) In tuitively , CV aR P β ( X ) measures the exp ected v alue of X in the w orst β -fraction of outcomes, and th us provides a risk-sensitiv e measure that captures tail b ehavior b ey ond standard exp ec- tation [39]. While CV aR is commonly used as a conserv ativ e outer appro ximation of chance con- strain ts (e.g., [10, 11]), the following result sho ws that, in our setting, it yields an exact reformulation of the DR-CC under the W asserstein am biguity set. Prop osition 1. L et ( Y , d Y ) denote the metric sp ac e use d in the definition of the Wasserstein ambiguity set (4) . Then, for any fixe d time t , the DR-CC (5) is e quivalent to CV aR ¯ Y t β − d Y ( ¯ Y t , C ) 2 p ≤ − ρ 2 p y β , (12) wher e ¯ Y t ∼ ¯ Y t and d Y ( y , C ) : = inf c ∈C d Y ( y , c ) denotes the distanc e fr om y to the c ol lision set. The pro of is pro vided in App endix B. In tuitiv ely , condition (12) requires that the β -tail expecta- tion of the negativ e clearance to the collision set remains b elo w zero under the nominal distribution. Consequen tly , the probabilit y of en tering the collision set cannot exceed β for an y distribution con- tained in the W asserstein am biguity set. Additionally , the reform ulation (12) dep ends only on the distance to the unsafe set C , and is therefore not restricted to a particular obstacle geometry . 4.2 Sample-based DR-MPC Problem Since the nominal system dynamics are linear and the pro cess noise is Gaussian, the predicted state distribution ¯ X j | k in the DR-MPC problem (6) is Gaussian with mean µ j | k and cov ariance Σ j | k obtained from the standard moment propagation equations. Using Prop osition 1, the DR-MPC problem (6) at discrete time k can b e reform ulated as min ¯ U k K − 1 X j =0 µ ⊤ j | k Qµ j | k + ¯ u ⊤ j | k R ¯ u j | k + µ ⊤ K | k Q f µ K | k (13a) s.t. µ j +1 | k = A d µ j | k + B d ¯ u j | k , j = 0 , . . . , K − 1 , (13b) ¯ u j | k ∈ U , j = 0 , . . . , K − 1 , (13c) µ j | k ∈ X , j = 1 , . . . , K , (13d) µ 0 | k = x, (13e) CV aR ¯ Y j | k β − d Y ( ¯ y j | k , C ) 2 p ≤ − ρ 2 p y β , j = 1 , . . . , K . (13f ) Despite this reform ulation, problem (13) remains intractable due to the exp ectation app earing in the CV aR constraint (13f), which is taken with resp ect to the nominal lifted distribution ¯ Y j | k . In general, this exp ectation is not a v ailable in closed form. T o address this issue, we appro ximate the CV aR constraint using Mon te Carlo sampling. Recall that the nominal lifted distribution factorizes as ¯ Y j | k = ¯ X j | k ⊗ ¯ Z j | k . Thus, samples of the lifted v ariable can be generated b y independently sampling the nominal system and environmen t distri- butions. In particular, samples of the predicted state are generated as ˆ x ( s ) j | k ∼ N ( µ j | k , Σ j | k ) , s = Algorithm 1 Sample-Based DR-MPC with Low-Lev el L 1 -Adaptiv e T racking 1: Input: horizon K , samples N , am biguity radii ρ x , ρ z , planning p erio d ∆ t , adaptation p erio d T s , filter bandwidth ω , adaptation gain λ s 2: for k = 0 , 1 , 2 , . . . do 3: t k ← k ∆ t ; measure X t k 4: Sample { ˆ z ( s ) j | k } s =1: N j =1: K from ¯ Z j | k 5: Solv e DR-MPC (13) with x = X t k to obtain ( ¯ u ⋆ k ( x ) , ¯ x ⋆ k ( x )) 6: Set ¯ U pl t = ¯ u ⋆ 0 | k ( x ), ¯ X pl t = ¯ x ⋆ 0 | k ( x ) 7: for t = t k : T s : t k +1 − T s do 8: Measure X t 9: U t ← ¯ U pl t − K fb ( X t − ¯ X pl t ) + U L 1 ,t 10: Up date L 1 predictor, adaptation, and filter 11: end for 12: end for 1 , . . . , N , while samples ˆ z ( s ) j | k are dra wn from the known nominal en vironmen t distribution ¯ Z j | k . The resulting lifted samples are ˆ y ( s ) j | k = ˆ x ( s ) j | k , ˆ z ( s ) j | k , s = 1 , . . . , N . Using these samples, the CV aR term in (13f) is appro ximated via its sample-a v erage represen- tation CV aR ¯ Y j | k β − d Y ( ¯ y j | k , C ) 2 p ≈ inf η ∈ R " η + 1 β N N X s =1 − d Y ( ˆ y ( s ) j | k , C ) 2 p − η + # . The resulting formulation replaces the infinite-dimensional DR-CC with a finite collection of constrain ts based on sampled nominal realizations of the system and en vironment states. As the n umber of samples N increases, the sample-av erage approximation con verges to the true CV aR constrain t. 3 The resulting sample-based DR-MPC problem, together with the lo w-lev el L 1 -adaptiv e trac king con troller, is summarized in Algorithm 1. 5 Exp erimen ts W e ev aluate the proposed framework through simul ations of tra jectory tracking with dynamic obstacle av oidance, where the true system is sub ject to matched nonlinear uncertain ties that are not captured b y the planning mo del. W e compare three metho ds: DR-MPC (Nominal) , which plans under environmen tal uncertaint y using the nominal mo del; DR-MPC (T rue Dynamics) , whic h applies the same controller directly to the uncertain system without adaptation; and DR-MPC + L 1 (pr op ose d) , whic h augmen ts the planner with an L 1 -adaptiv e lay er to comp ensate for mo del mismatc h. 4 3 F or several commonly used environmen t geometries, the distance d Y (( x, z ) , C ) admits closed-form expressions that yield tractable constraints. In particular, circular and p olytopic unsafe sets lead to efficiently computable form ulations. These cases are summarized in App endix C. 4 Additional experimental results, videos, and co de are av ailable at https://gith ub.com/astghikhakob y an-csie/L1- DRMPC. T able 1: P erformance comparison o ver 100 runs (mean ± std). Reference Metho d J trac k P fail (%) ρ emp Figure-eigh t DR-MPC (Nom.) 6888 . 92 ± 1131 . 59 0 0 . 04 DR-MPC (T rue Dyn.) 10590 . 61 ± 5551 . 03 31 DR-MPC + L 1 7409 . 98 ± 1057 . 04 1 Circle DR-MPC (Nom.) 1883 . 42 ± 235 . 43 0 0 . 02 DR-MPC (T rue Dyn.) 3 . 68 × 10 5 ± 3 . 65 × 10 5 86 DR-MPC + L 1 2019 . 25 ± 246 . 64 0 Lissa jous DR-MPC (Nom.) 566 . 76 ± 93 . 62 0 0 . 04 DR-MPC (T rue Dyn.) 3090 . 88 ± 2091 . 68 8 DR-MPC + L 1 681 . 49 ± 79 . 25 0 Spiral DR-MPC (Nom.) 5657 . 09 ± 3152 . 24 2 0 . 04 DR-MPC (T rue Dyn.) 4248 . 69 ± 1776 . 33 44 DR-MPC + L 1 6236 . 01 ± 5214 . 38 1 5.1 Exp erimen t Setup The rob ot operates in a 2D en vironmen t with state x t = [ p x,t , p y ,t , v x,t , v y ,t ] ⊤ and con trol input u t = [ a x,t , a y ,t ] ⊤ . The nominal dynamics are mo deled as a sto c hastic double integrator, while the true system includes matched nonlinear uncertainties in the control c hannel. The environmen t consists of m ultiple mo ving obstacles, each following a constan t-velocity model with additiv e Gaussian noise (standard deviation 0 . 5). The DR-MPC planner tracks a reference tra jectory with prediction horizon K = 25, risk level β = 0 . 05, and N = 40 samples for the CV aR approximation. The L 1 -adaptiv e controller uses ω = 50, T s = 10 − 3 , and λ s = 100. W e ev aluate four reference tra jectories ( figur e-eight , cir cle , Lissajous , and spir al ) ov er 100 Monte Carlo runs. The am biguity radius for each case is shown in T able 1, selected using the certified b ound of Theorem 1 and Lemma 1 as an initial design p oint and then tuned to balance conserv atism and empirical p erformance. 5 5.2 Results Quan titativ e Results. T able 1 summarizes the trac king cost (for successful runs), W asserstein distance, and failure probability across 100 Mon te Carlo runs, where failure includes collisions, loss of feasibility , or n umerical instabilit y (e.g., state divergence). While the distributionally robust planner accoun ts for environmen tal uncertaint y , it do es not comp ensate for mo del mismatch. As a result, applying DR-MPC directly to the true system leads to severe degradation in closed-lo op p erformance, including large increases in trac king cost and high failure rates (up to 86% in the circle scenario), indicating a lac k of robustness to unmo deled dynamics. In con trast, augmen ting DR-MPC with the L 1 -adaptiv e con troller significan tly impro ves reliabilit y . The proposed method eliminates failures in all four scenarios, while main taining trac king p erformance close to the nominal baseline. Qualitativ e Results. Represen tative tra jectories for the figure-eight scenario are illustrated in Fig. 2. Although all metho ds rely on the same DR-MPC planner, their closed-lo op b eha vior 5 The certified construction yields the conserv ativ e radius ρ x + ρ z , whic h we use as an initial design point. Therefore, w e employ a smaller tuned radius ρ y to balance robustness and empirical p erformance. Figure 2: Closed-lo op tra jectories for the figure-eigh t scenario at different times. Without adapta- tion, the controller deviates from the reference due to mo del mismatc h, whereas the L 1 -augmen ted con troller closely trac ks the nominal tra jectory and maintains safe obstacle a v oidance. differs significantly under model mismatc h. A t t = 1 . 58 s, the true system without adaptive aug- men tation begins to deviate noticeably from the reference tra jectory due to unmodeled dynamics. F urthermore, at t = 5 . 30 s, the system fails to anticipate the uncertaint y in the cluttered region, leading to a collision with the p olygon. By contrast, the L 1 -augmen ted con troller closely trac ks the nominal tra jectory throughout execution. This b ehavior is consisten t with the theoretical guarantees, whic h ensure that the adaptiv e con troller keeps the true state distribution close to the nominal one. Ov erall, the results highligh t the complemen tary roles of the t wo comp onen ts: DR-MPC pro- vides robustness to en vironmental uncertain ty at the planning stage, while the L 1 -adaptiv e con- troller comp ensates for mo del uncertain ty online, ensuring reliable closed-lo op p erformance and main taining the v alidit y of the distributional safety guarantees at each feasible planning step. 6 Conclusions This pap er prop osed a hierarc hical framew ork for safe control under mo del and en vironment un- certain ty by in tegrating L 1 -A C with DR-MPC. The L 1 con troller provides online certificates that b ound the deviation b etw een nominal and true state distributions, enabling the construction of am biguity sets for DR-MPC. W e show ed that the feasibilit y of the resulting planning problem im- plies stagewise safety of the true system. Numerical results demonstrated effective p erformance under sim ultaneous uncertain ties. F uture w ork will address fully nonlinear dynamics and recursive feasibilit y guaran tees for the DR-MPC formulation. A Pro of of Theorem 2 Pr o of. Fix a sampling time t k . Define the lifted random v ariable Y t k := ( X t k , Z t k ), with la w Y t k = L ( Y t k ), and let ¯ Y t k := ( ¯ X t k , ¯ Z t k ) denote its nominal counterpart with law ¯ Y t k = ¯ X t k ⊗ ¯ Z t k . By Theorem 1, w e hav e W 2 p ( X t k , ¯ X t k ) ≤ ρ x . Moreo ver, since ρ z ≥ ρ z ( N , δ z ), Lemma 1 implies that W 2 p ( Z t k , ¯ Z t k ) ≤ ρ z holds with probability at least 1 − δ z with resp ect to the environmen t data. Conditioned on this even t, let π x ∈ Π( X t k , ¯ X t k ) and π z ∈ Π( Z t k , ¯ Z t k ) be couplings. Since the system state and environmen t state are indep endent, the join t distributions factorize as Y t k = X t k ⊗ Z t k and ¯ Y t k = ¯ X t k ⊗ ¯ Z t k . Therefore, the pro duct measure π := π x ⊗ π z is a coupling b et ween Y t k and ¯ Y t k . By definition of the W asserstein distance, W 2 p ( Y t k , ¯ Y t k ) ≤ R ∥ ( x, z ) − ( ¯ x, ¯ z ) ∥ 2 p dπ 1 / (2 p ) . Using the triangle inequalit y and Mink owski’s inequalit y , W 2 p ( Y t k , ¯ Y t k ) ≤ Z ( ∥ x − ¯ x ∥ + ∥ z − ¯ z ∥ ) 2 p dπ 1 / (2 p ) ≤ W 2 p ( X t k , ¯ X t k ) + W 2 p ( Z t k , ¯ Z t k ) ≤ ρ x + ρ z . Hence, Y t k ∈ B 2 p ¯ Y t k , ρ x + ρ z with probability at least 1 − δ z with resp ect to the environmen t data. Since the DR-MPC planner enforces the DR-CC (6f) for all distributions in the ambiguit y set B 2 p ( ¯ Y t k , ρ y ) with ρ y = ρ x + ρ z , it follows that P ( Y t k ∈ C ) ≤ β with probabilit y at least 1 − δ z . Finally , since Y t k ∈ C ⇐ ⇒ X t k ∈ O ( Z t k ) , w e conclude that P ( X t k / ∈ O ( Z t k )) ≥ 1 − β , whic h completes the pro of. B Pro of of Prop osition 1 Pr o of. Let ℓ ( y ) = 1 C ( y ), where 1 C ( · ) denotes the indicator function of the set C . Since C is measurable, the function ℓ is Borel measurable, and since 0 ≤ ℓ ≤ 1, we also ha ve ℓ ∈ L 1 ( ¯ Y t ). Therefore, the strong duality lemma applies and yields sup ν t ∈ B 2 p ( ¯ Y t ,ρ y ) P ν t ( Y t ∈ C ) = inf γ ≥ 0 γ ρ 2 p y + E ¯ Y t ∼ ¯ Y t ¯ ℓ γ ( ¯ Y t ) , where ¯ ℓ γ ( ¯ y ) = sup y ∈Y 1 C ( y ) − γ d Y ( y , ¯ y ) 2 p . No w fix ¯ y ∈ Y . If y ∈ C , the inner expression equals 1 − γ d Y ( y , ¯ y ) 2 p , whose supremum o ver y ∈ C is 1 − γ d Y ( ¯ y , C ) 2 p . If y / ∈ C , the indicator term v anishes, and the expression is at most 0. Hence ¯ ℓ γ ( ¯ y ) = 1 − γ d Y ( ¯ y , C ) 2 p + . Substituting this in to the dual formulation giv es sup ν t ∈ B 2 p ( ¯ Y t ,ρ y ) P ν t ( Y t ∈ C ) = inf γ ≥ 0 n γ ρ 2 p y + E ¯ Y t ∼ ¯ Y t h 1 − γ d Y ( ¯ Y t , C ) 2 p + io . Therefore, the DR-CC (5) holds if and only if inf γ ≥ 0 n γ ρ 2 p y + E ¯ Y t ∼ ¯ Y t h 1 − γ d Y ( ¯ Y t , C ) 2 p + io ≤ β . (14) Since β ∈ (0 , 1), the optimizer in (14) cannot o ccur at γ = 0, b ecause the ob jectiv e v alue at γ = 0 is 1 > β . Th us, w e ma y restrict attention to γ > 0. Introduce the change of v ariables η = − 1 /γ . Then − d Y ( ¯ Y t , C ) 2 p − η + = 1 γ 1 − γ d Y ( ¯ Y t , C ) 2 p + . Therefore, η + 1 β E ¯ Y t ∼ ¯ Y t h − d Y ( ¯ Y t , C ) 2 p − η + i ≤ − ρ 2 p y β if and only if γ ρ 2 p y + E ¯ Y t ∼ ¯ Y t h 1 − γ d Y ( ¯ Y t , C ) 2 p + i ≤ β . Using the standard representation (11) and taking the infim um ov er η ∈ R (equiv alen tly , ov er γ > 0) yields (12). C T ractable Distance Expressions for T ranslated Unsafe Regions In this app endix, w e derive tractable expressions for the distance d Y (( x, z ) , C ) app earing in the CV aR reform ulation of the distributionally robust c hance constrain t, when the en vironment induces unsafe regions via translations of a fixed shape. W e consider the case where the e n vironmen t v ariable z ∈ R n z represen ts the p osition of the obstacle, while the system state x ∈ R n ma y include additional comp onents (e.g., v elo city). Let C ∈ R n z × n b e a matrix that extracts the position comp onents of the state, so that C x represen ts the p osition of the system. Lemma 3. L et ( Y , d Y ) denote the lifte d state sp ac e e quipp e d with the Euclide an metric d Y (( x, z ) , ( x ′ , z ′ )) = ∥ ( x, z ) − ( x ′ , z ′ ) ∥ . L et S ⊂ R n z b e a nonempty close d set and define the tr anslate d unsafe r e gion O ( z ) = { x ∈ R n : C x − z ∈ S } , z ∈ R n z . The c orr esp onding lifte d unsafe set is C = { ( x, z ) ∈ R n × R n z : C x − z ∈ S } . Then, for any ( x, z ) ∈ Y = R n × R n z , d Y ( x, z ) , C = 1 √ 2 dist( C x − z , S ) , wher e dist( y , S ) := inf ˜ y ∈ S ∥ y − ˜ y ∥ . Pr o of. By definition, d Y ( x, z ) , C = inf ( x ′ ,z ′ ) C x ′ − z ′ ∈ S p ∥ x − x ′ ∥ 2 + ∥ z − z ′ ∥ 2 . Let y := C x − z and ˜ y := C x ′ − z ′ . Then ˜ y ∈ S and y − ˜ y = C ( x − x ′ ) − ( z − z ′ ) . Define a := x − x ′ and b := z − z ′ . Then C a − b = y − ˜ y . Fix d := y − ˜ y . The inner problem b ecomes inf a ∈ R n , b ∈ R n z C a − b = d p ∥ a ∥ 2 + ∥ b ∥ 2 . The optimal solution is obtained b y balancing a and b , yielding the minim um v alue ∥ d ∥ / √ 2. Therefore, d Y ( x, z ) , C = 1 √ 2 inf ˜ y ∈ S ∥ y − ˜ y ∥ = 1 √ 2 dist( C x − z , S ) . This result highligh ts that the lifted distance dep ends only on the relative p osition C x − z , reducing the problem to computing a standard Euclidean distance in R n z scaled by 1 / √ 2. W e no w specialize this result to common obstacle geometries. C.1 Circular Unsafe Region Consider a circular unsafe region with uncertain cen ter z ∈ R n z and radius r > 0, defined b y O ( z ) = { x ∈ R n : ∥ C x − z ∥ ≤ r } . This corresp onds to the base set S = { y ∈ R n z : ∥ y ∥ ≤ r } . By Lemma 3, d Y ( x, z ) , C = 1 √ 2 ( ∥ C x − z ∥ − r ) + . Th us, for sampled lifted v ariables, d Y b Y ( s ) j | k , C = 1 √ 2 C b X ( s ) j | k − b Z ( s ) j | k − r + . C.2 P olytopic Unsafe Region Consider a translated p olytopic unsafe region with uncertain p osition z ∈ R n z and fixed shap e P := { y ∈ R n z : Ay ≤ b } , where A ∈ R m × n z and b ∈ R m . The unsafe region is given b y O ( z ) = { x ∈ R n : C x − z ∈ P } . Applying Lemma 3 yields d Y ( x, z ) , C = 1 √ 2 dist( C x − z , P ) . Equiv alently , d Y ( x, z ) , C = 1 √ 2 min ˜ y ∈ R n z A ˜ y ≤ b ∥ C x − z − ˜ y ∥ . Th us, for sampled lifted v ariables, d Y b Y ( s ) j | k , C = 1 √ 2 min ˜ y ∈ R n z A ˜ y ≤ b C b X ( s ) j | k − b Z ( s ) j | k − ˜ y . In b oth cases, the distance term admits a conv ex represen tation and can b e incorporated into the sample-based CV aR constrain t using standard epigraph reformulations. References [1] K. Zhou and J. C. Doyle, Essentials of r obust c ontr ol . Prentice Hall Upper Saddle River, NJ, 1998, vol. 104. [2] I. M. Mitchell, A. M. Ba y en, and C. J. T omlin, “A time-dep enden t Hamilton-Jacobi form ula- tion of reachable sets for con tinuous dynamic games,” IEEE T r ansactions on automatic c ontr ol , v ol. 50, no. 7, pp. 947–957, 2005. [3] S. L. Herb ert, M. Chen, S. Han, S. Bansal, J. F. Fisac, and C. J. T omlin, “F aSTrack: A mo dular framew ork for fast and guaran teed safe motion planning,” in 2017 IEEE 56th Annual Confer enc e on De cision and Contr ol (CDC) . IEEE, 2017, pp. 1517–1522. [4] S. Singh, B. Landry , A. Ma jumdar, J.-J. Slotine, and M. Pa v one, “Robust feedbac k motion planning via con traction theory ,” The International Journal of R ob otics R ese ar ch , 2019. [5] J. Ac hiam, D. Held, A. T amar, and P . Abb eel, “Constrained p olicy optimization,” in Pr o c. Int. Conf. Mach. L e arn. PMLR, 2017, pp. 22–31. [6] Z. Liu, Z. Cen, V. Isenbaev, W. Liu, S. W u, B. Li, and D. Zhao, “Constrained v ariational policy optimization for safe reinforcemen t learning,” in Pr o c. Int. Conf. Mach. L e arn. PMLR, 2022, pp. 13 644–13 668. [7] P . Moha jerin Esfahani and D. Kuhn, “Data-driv en distributionally robust optimization using the W asserstein metric: Performance guaran tees and tractable reformulations,” Math. Pr o- gr am. , v ol. 171, no. 1, pp. 115–166, 2018. [8] D. Kuhn, P . M. Esfahani, V. A. Nguyen, and S. Shafieezadeh-Abadeh, “W asserstein distri- butionally robust optimization: Theory and applications in machine learning,” in Op er. R es. Manag. Sci. A ge A nalyt. INFORMS, 2019, pp. 130–166. [9] R. Gao and A. Kleywegt, “Distributionally robust sto c hastic optimization with Wasserstein distance,” Math. Op er. R es. , vol. 48, no. 2, pp. 603–655, 2023. [10] S. Zymler, D. Kuhn, and B. Rustem, “Distributionally robust join t chance constrain ts with second-order moment information,” Math. Pr o gr am. , v ol. 137, no. 1, pp. 167–198, 2013. [11] W. Xie, “On distributionally robust c hance constrained programs with Wasserstein distance,” Math. Pr o gr am. , vol. 186, no. 1, pp. 115–155, 2021. [12] R. Ji and M. A. Lejeune, “Data-driven distributionally robust chance-constrained optimization with Wasserstein metric,” J. Glob al Optim. , vol. 79, no. 4, pp. 779–811, 2021. [13] N. Li, A. Girard, and I. Kolmanovsky , “Chance-constrained controller state and reference go vernor,” A utomatic a , vol. 133, p. 109864, 2021. [14] K. Kim and I. Y ang, “Distributional robustness in minimax linear quadratic control with Wasserstein distance,” SIAM J. Contr ol Optim. , v ol. 61, no. 2, pp. 458–483, 2023. [15] B. T askesen, D. Iancu, C ¸ . Ko¸ cyi˘ git, and D. Kuhn, “Distributionally robust linear quadratic con trol,” A dv. Neur al Inf. Pr o c ess. Syst. , v ol. 36, pp. 18 613–18 632, 2023. [16] J. Queeney and M. Benosman, “Risk-a verse mo del uncertain ty for distributionally robust safe reinforcemen t learning,” A dv. Neur al Inf. Pr o c ess. Syst. , vol . 36, pp. 1659–1680, 2023. [17] K. Long, Y. Yi, Z. Dai, S. Herb ert, J. Cort ´ es, and N. Atanaso v, “Sensor-based distributionally robust con trol for safe rob ot navigation in dynamic en vironmen ts,” Int. J. R ob ot. R es. , v ol. 45, no. 2, pp. 328–351, 2026. [18] J. Coulson, J. Lygeros, and F. D¨ orfler, “Distributionally robust chance constrained data- enabled predictive control,” IEEE T r ans. A utom. Contr ol , v ol. 67, no. 7, pp. 3289–3304, 2021. [19] R. D. McAllister and P . M. Esfahani, “Distributionally robust mo del predictive con trol: Closed-lo op guarantees and scalable algorithms,” IEEE T r ans. Autom. Contr ol , vol. 70, no. 5, pp. 2963–2978, 2024. [20] A. Hakob y an and I. Y ang, “W asserstein distributionally robust motion control for collision a voidance using conditional v alue-at-risk,” IEEE T r ans. R ob ot. , vol. 38, no. 2, pp. 939–957, 2021. [21] A. Zolanv ari and A. Cherukuri, “Iterative risk-constrained mo del predictiv e control: A data- driv en distributionally robust approach,” IEEE T r ans. A utom. Contr ol , 2025. [22] I. Y ang, “W asserstein distributionally robust sto c hastic control: A data-driven approach,” IEEE T r ans. A utom. Contr ol , vol. 66, no. 8, pp. 3863–3870, 2020. [23] R. Gao, “Finite-sample guaran tees for wasserstein distributionally robust optimization: Break- ing the curse of dimensionality ,” Op er ations R ese ar ch , v ol. 71, no. 6, pp. 2291–2306, 2023. [24] I. Gregory , E. Xargay , C. Cao, and N. Ho v akimy an, “Flight test of an L 1 adaptiv e controller on the NASA AirST AR flight test vehicle,” in Pr o c e e dings of AIAA Guidanc e, Navigation, and Contr ol Confer enc e , T oronto, On tario, Canada, August 2010, AIAA 2010-8015. [25] K. A. Ack erman, E. Xarga y , R. Cho e, N. Hov akimy an, M. C. Cotting, R. B. Jeffrey , M. P . Blac kstun, T. P . F ulkerson, T. R. Lau, and S. S. Stephens, “Ev aluation of an L 1 adaptiv e fligh t con trol law on Calspan’s v ariable-stabilit y Learjet,” AIAA Journal of Guidanc e, Contr ol, and Dynamics , vol. 40, no. 4, pp. 1051–1060, 2017. [26] M. Sung, S. H. Karumanchi, A. Gahlaw at, and N. Ho v akimy an, “Robust mo del based reinforcement learning using L 1 adaptiv e con trol,” in The Twelfth International Confer enc e on L e arning R epr esentations (ICLR) , 2024. [Online]. Av ailable: h ttps: //op enreview.net/forum?id=GaLCLvJaoF [27] A. Gahla w at, P . Zhao, A. P atterson, N. Hov akimy an, and E. Theodorou, “ L 1 - G P : L 1 adaptiv e con trol with bay esian learning,” in L e arning for dynamics and c ontr ol . PMLR, 2020, pp. 826– 837. [28] A. Gahlaw at, A. Lakshmanan, L. Song, A. P atterson, Z. W u, N. Ho v akim yan, and E. A. Theo dorou, “Con traction l1-adaptiv e control using gaussian pro cesses,” in Pr o c e e dings of the 3r d Confer enc e on L e arning for Dynamics and Contr ol . PMLR, 2021, pp. 1027–1040. [29] K. Pereida, L. Brunke, and A. P . Sc ho ellig, “Robust adaptive mo del predictive control for guaran teed fast and accurate stabilization in the presence of mo del errors,” Int. J. R obust Nonline ar Contr ol , v ol. 31, no. 18, pp. 8750–8784, 2021. [30] R. T ao, P . Zhao, I. Kolmanovsky , and N. Hov akimy an, “Robust adaptive MPC under non- linear time-v arying uncertainties: An uncertaint y comp ensation approach,” arXiv pr eprint arXiv:2603.00283 , 2026. [31] J. Pravi tra, K. A. Ack erman, C. Cao, N. Hov akimy an, and E. A. Theo dorou, “ L 1 -adaptiv e mppi architecture for robust and agile con trol of m ultirotors,” in Pr o c. IEEE/RSJ Int. Conf. Intel l. R ob ots Syst. , 2020, pp. 7661–7666. [32] A. Gahla wat, S. H. Karumanc hi, and N. Hov akimy an, “ L 1 -DRA C: Distributionally robust adaptiv e con trol,” arXiv pr eprint arXiv:2509.04619 , 2025. [33] A. Gahlaw at, V. Khatana, D. W ang, S. H. Karumanchi, N. Hov akimy an, and P . V oulgaris, “W asserstein distributionally robust adaptiv e co v ariance steering,” in Pr o c. IEEE Conf. De cis. Contr ol , 2025, pp. 4845–4850. [34] C. V an Loan, “Computing integrals in volving the matrix exp onen tial,” IEEE T r ans. A utom. Contr ol , v ol. 23, no. 3, pp. 395–404, 2003. [35] Y. Bar-Shalom, X. R. Li, and T. Kirubara jan, Estimation with applic ations to tr acking and navigation: the ory algorithms and softwar e . John Wiley & Sons, 2001. [36] N. Ho v akim y an and C. Cao, L 1 adaptive c ontr ol the ory: Guar ante e d r obustness with fast adap- tation . SIAM, 2010. [37] N. F ournier and A. Guillin, “On the rate of conv ergence in Wasserstein distance of the empirical measure,” Pr ob ab. The ory R elat. Fields , v ol. 162, no. 3, pp. 707–738, 2015. [38] L. Zhang, J. Y ang, and R. Gao, “A short and general duality proof for W asserstein distribu- tionally robust optimization,” Op er. R es. , v ol. 73, no. 4, pp. 2146–2155, 2025. [39] R. T. Ro c k afellar and S. Uryasev, “Conditional v alue-at-risk for general loss distributions,” J. Bank. Financ e , v ol. 26, no. 7, pp. 1443–1471, 2002.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment