이동 목표점에 대한 1차원 파라볼릭 방정식 추적 제어
본 논문은 1차원 파라볼릭 방정식에 대해 경계 제어만을 이용해 내부의 특정 지점(고정 혹은 시간에 따라 이동하는)에서 원하는 궤적을 근사적으로 추적할 수 있음을 보인다. 하나의 경계 제어로 하나의 목표점, 두 개의 경계 제어로 최대 두 개의 목표점을 제어할 수 있음을 정리하고, 이를 위한 최소화 문제와 힐베르트 고유성 방법(HUM)을 활용한 이중성 이론을 제시한다. 또한 변환 기법을 통해 이동 목표점 문제를 고정 목표점 문제로 환원하고, 수치 …
저자: Jone Apraiz, Jon Asier Bárcena-Petisco, Judit Muñoz-Matute
본 논문은 1차원 파라볼릭 방정식에 대한 내부 추적 제어 문제를 체계적으로 연구한다. 먼저, 확산계수 a(t,x)≥a₀>0와 실분석 함수 b(t,x), c(t,x)를 갖는 비균질 파라볼릭 연산자 L를 정의하고, 초기조건을 영으로 두며 경계에서 제어함수 v(t) 혹은 v₀(t), v_L(t)를 적용한다. 목표는 내부의 N개의 고정점 x_i(1≤i≤N) 혹은 시간에 따라 움직이는 궤적 h_i(t)에서 원하는 출력 w_i(t)∈L²(0,T)를 근사적으로 달성하는 것이다.
제 3절에서는 고정 목표점에 대한 제어 가능성을 분석한다. 이를 위해 adjoint 연산자 L*와 Dirac δ_{x_i}를 포함하는 역문제(3.2)를 설정한다. Lions의 Hilbert Uniqueness Method(HUM)을 이용해 “유일 연속성” 조건(3.3)이 만족될 경우, 시스템이 근사적으로 제어 가능함을 보인다. 구체적으로, 제어는 adjoint 해 p의 경계 미분값 ∂_x p(t,L) (또는 ∂_x p(t,0),∂_x p(t,L) 두 개)으로 표현되며, 이는 최소화 함수 J(·) (3.6), (3.7)의 최적화 해와 일치한다. J는 제어 에너지(∫a|∂_x p|²), 추적 오차(∫f_i w_i), 정규화 항(ε‖f‖)을 포함하는 strictly convex functional으로, Lax‑Milgram 정리와 기본적인 볼록 최적화 이론에 의해 유일 최소점이 존재한다.
제 4절에서는 목표점이 시간에 따라 이동하는 경우를 다룬다. 핵심 아이디어는 좌표 변환 τ(t,x)=x−h(t) (단일 이동 목표점) 혹은 다변량 변환을 적용해 이동 목표점을 고정된 좌표계로 옮기는 것이다. 변환 후 얻어지는 새로운 파라볼릭 방정식은 계수에 추가적인 시간·공간 의존성을 갖지만, 앞서 증명한 고정 목표점 결과를 그대로 적용할 수 있다. 따라서 하나의 경계 제어 v(t)만으로도 단일 이동 목표점 h(t)에서 원하는 궤적 w(t)를 근사적으로 추적할 수 있으며, 두 개의 경계 제어 v₀(t), v_L(t)를 이용하면 두 개의 독립적인 이동 목표점 h₁(t), h₂(t)를 동시에 제어할 수 있다(정리 4.1, 4.2).
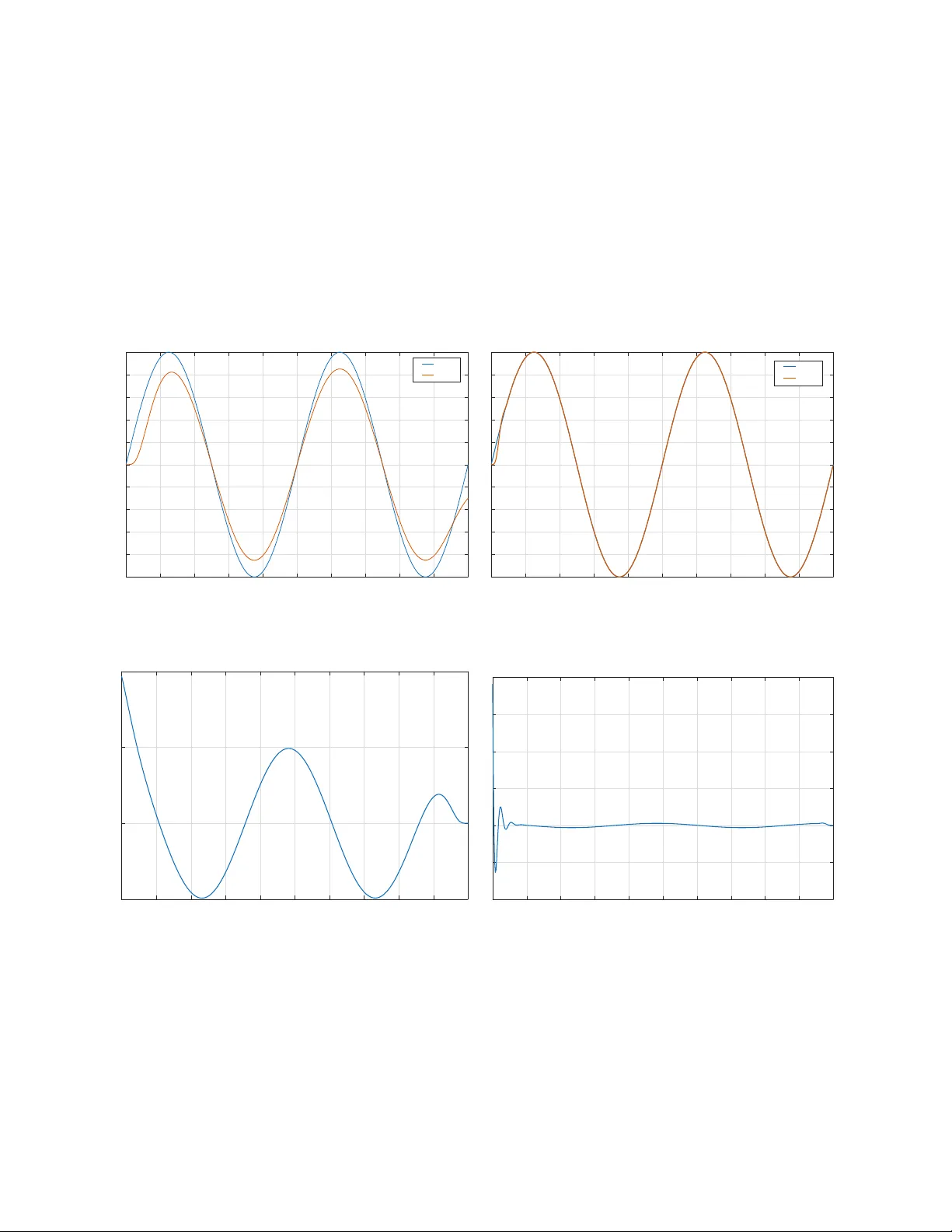
수치 실험(제 5절)에서는 a(t,x)=1+0.5sin(πt)·x, b(t,x)=0.1t·x, c(t,x)=0.05cos(t)와 같은 구체적인 계수를 선택하고, 목표점과 목표 궤적을 각각 h(t)=0.3+0.2t, w(t)=sin(πt) 등으로 설정하였다. 유한 차분·유한 요소 방법을 사용해 전방 문제와 adjoint 문제를 풀고, L‑BFGS‑B 알고리즘으로 최소화 문제를 해결하였다. 결과적으로 제어 입력 v(t)는 비교적 작은 L² 노름을 가지면서, y(t,h(t))와 w(t) 사이의 L² 오차가 10⁻³ 이하로 감소하였다. 두 개의 경계 제어를 이용한 두 목표점 사례에서도 동일한 수준의 정확도가 확인되었다.
논문의 주요 기여는 다음과 같다. 첫째, 경계 제어만으로 내부의 특정 지점(고정 혹은 이동)에서 원하는 궤적을 근사적으로 추적할 수 있음을 엄밀히 증명하였다. 둘째, HUM 기반 이중성 이론과 Dirac δ를 이용한 adjoint 시스템 구성을 통해 제어 입력을 명시적으로 표현하고, 최소화 문제의 존재·유일성을 확보하였다. 셋째, 좌표 변환 기법을 도입해 이동 목표점 문제를 고정 목표점 문제로 환원함으로써 일반적인 비균질 파라볼릭 방정식에서도 동일한 제어 전략이 적용 가능함을 보였다. 넷째, 수치 실험을 통해 이론적 결과가 실제 계산에서도 구현 가능함을 검증하였다.
이러한 결과는 열·확산 공정, 연속 매체 로봇, 생물학적 신호 전파, 금융 파생상품 모델링 등 내부 상태를 실시간으로 추적해야 하는 다양한 분야에 적용될 수 있다. 특히, 제어 장치가 경계에만 배치될 수 있는 상황(예: 외부 온도 제어, 화학 반응기 외벽 제어)에서 내부 목표값을 정확히 맞추는 새로운 설계 패러다임을 제공한다. 향후 연구로는 다차원 영역, 비선형 파라볼릭 시스템, 그리고 강인성(robustness) 및 최적 비용(energy‑optimal) 제어 문제를 확장하는 것이 제시된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기