이동형 POD 기반 최적 제어: 선감소 후 최적화 프레임워크
본 논문은 전파‑지배 PDE의 최적 제어 문제를 해결하기 위해 이동형 Proper Orthogonal Decomposition(sPOD)을 이용한 선감소‑후‑최적화 방식을 제안한다. 1차원 선형 대류 방정식을 대상으로 sPOD‑Galerkin 모델의 존재·유일성을 증명하고, 정규화 파라미터가 충분히 클 때 최적 제어 존재성을 확보한다. 또한 기존 POD와의 계산 효율 및 차원 축소 성능을 수치 실험을 통해 비교한다.
저자: Tobias Breiten, Shubhaditya Burela, Philipp Schulze
본 논문은 전파‑지배 편미분 방정식(PDE) 기반 최적 제어 문제의 계산 복잡성을 감소시키기 위해, 이동형 Proper Orthogonal Decomposition(sPOD)을 이용한 “선감소‑후‑최적화”(first‑reduce‑then‑optimize) 프레임워크를 제시한다.
1. **문제 설정 및 기존 연구**
저자는 1차원 선형 대류 방정식 ∂ₜy+v∂ₓy = u 를 제어 시스템 ẏ(t)=Ay(t)+Bu(t) 형태로 추상화하고, 이차 트래킹 비용 J(y,u)=½∫₀ᵀ‖y−y_d‖²+½μ²∫₀ᵀ‖u‖² 를 고려한다. 기존 문헌에서는 POD, RB, Balanced Truncation 등 다양한 모델 차원 축소 기법이 LQ 제어에 적용돼 왔으나, 전파‑지배 문제는 Kolmogorov‑width 감소가 느려 POD 기반 방법이 비효율적이라는 점을 강조한다.
2. **POD‑Galerkin (POD‑G) 개요**
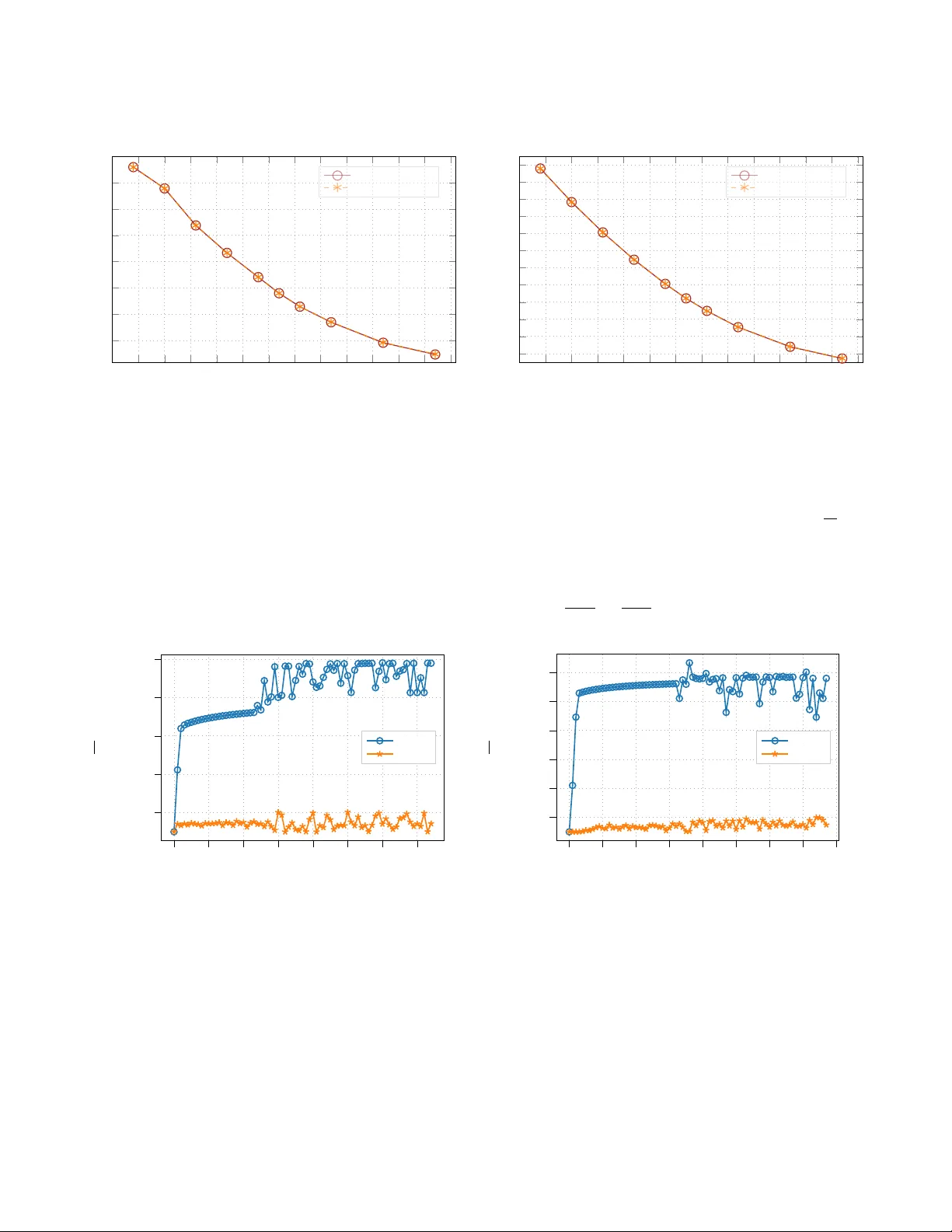
전통 POD는 스냅샷 행렬의 특이값 분해를 통해 정규 직교 기저 {φ_i}를 얻고, Galerkin 투영을 통해 저차원 ODE ẋ= A_ℓ x + B_ℓ u 로 변환한다. 이 방식은 선형 시스템에 대해 이론적으로 잘 정립돼 있으나, 전파 현상에서는 필요한 차원 ℓ이 크게 증가한다.
3. **이동형 POD (sPOD) 및 sPOD‑Galerkin (sPOD‑G) 설계**
sPOD는 시간‑의존적인 이동 연산자 T(z) 를 도입해 y(t)≈∑_{i=1}^{ℓ̃} α_i(t) T(z(t)) φ_i 로 표현한다. 여기서 T(z) 는 주기적 이동 연산자로, T(z)φ(x)=φ(x−η) (η = z mod ℓ) 로 정의된다. 변환 연산자는 등거리(isometric)이며, H¹_per(0,ℓ) 공간을 보존한다.
비선형 Galerkin 투영(Dirac–Frenkel 원리)을 적용하면, α(t)와 이동 변수 z(t) 사이에 다음과 같은 연동 미분 방정식이 도출된다:
\
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기