SG와 IBR 결합계통의 다중진동 전이안정성: LVRT·복구 제어가 초래하는 새로운 각도불안정 메커니즘
본 논문은 저전압 유지(LVRT) 및 복구 제어를 수행하는 그리드‑팔로잉 인버터(IBR)가 동기발전기(SG)의 전이각도 불안정을 유발할 수 있음을 밝힌다. LVRT 동안 IBR가 제공하는 감쇠 토크가 양(양성)일 때는 1차 진동 안정성을 향상시키지만, 회전속도가 감소하는 구간에서는 부정적 감쇠 효과가 발생해 감속 에너지가 누적되고, 복구 단계에서 회복 속도가 느릴 경우 다중진동(멀티‑스윙) 불안정으로 이어진다. 에너지 함수와 ‘스프링 효과’ 비…
저자: Songhao Yang, Bingfang Li, Zhiguo Hao
본 논문은 그리드‑팔로잉 인버터(IBR)의 저전압 유지(LVRT)와 복구 제어가 인접한 동기발전기(SG)의 전이각도 안정성에 미치는 영향을 새롭게 조명한다. 기존 연구는 주로 IBR가 1차 진동(First‑Swing) 안정성에 미치는 긍정적 효과에 초점을 맞췄으나, 본 연구는 LVRT 동안 IBR가 전압 강하에 대응해 전류 iq 를 증가시키고 전력 결합항 Pw 을 감소시키는 과정에서 발생하는 비정상적인 감쇠 토크가 SG의 다중진동(Multi‑Swing) 불안정을 유발할 수 있음을 제시한다.
1) **시스템 모델링**: SG는 관성 J, 감쇠 D, 기계출력 Pm, 전기출력 Pe 로 표현되며, 전압‑각도 관계식 Pe = E_s · U · α · sin δ − U² · α · cos δ 로 정의된다. IBR는 PLL을 통해 위상 θ 를 추정하고, d‑축 전류 id 와 q‑축 전류 iq 를 제어한다. LVRT 시 iq 증가와 id 감소는 Pw = α · U · (I_d cos δ + I_q sin δ) 를 감소시킨다.
2) **에너지 함수 기반 분석**: 전이 에너지 V(δ, ω) 를 정의하고 V̇을 전개하면 V̇ = (ΔPw · Δω) − D Δω² 형태가 된다. 여기서 ΔPw < 0 이며, Δω > 0(가속) 구간에서는 ΔPw·Δω < 0 로 V̇ < 0, 즉 양성 감쇠가 작용해 첫 번째 스윙에서 안정성을 강화한다. 반대로 Δω < 0(감속) 구간에서는 ΔPw·Δω > 0 가 되어 V̇ > 0, 부정적 감쇠가 발생하고 감속 에너지가 누적된다.
3) **LVRT 단계**: 고장 발생 시 전압이 급락하고 IBR가 LVRT 제어에 들어가면 Pw가 급감한다. 전력‑각도 곡선(Pe‑δ)와 Pm + Pw의 교점이 이동해 SG가 순간적으로 가속하거나 감속한다. 가속 시 양성 감쇠가 작용해 첫 번째 스윙은 안정하지만, 감속 시 부정적 감쇠가 작용해 감속 에너지가 증가하고, 이는 다음 스윙에서 가속 에너지로 전환돼 다중진동 불안정을 초래한다.
4) **복구 단계**: 고장이 해소된 후 IBR는 점진적으로 Pw를 복구한다. 복구 속도가 느릴수록 ΔPw (t) < 0 구간이 길어져 감속 구간(A→B)에서 V가 크게 상승하고, 복구 구간(B→C)에서 V가 감소하더라도 그 폭이 작아 한 사이클 동안 ΔV > 0 가 된다. 이때 에너지 누적이 지속되면 SG는 다중진동 불안정으로 전이한다.
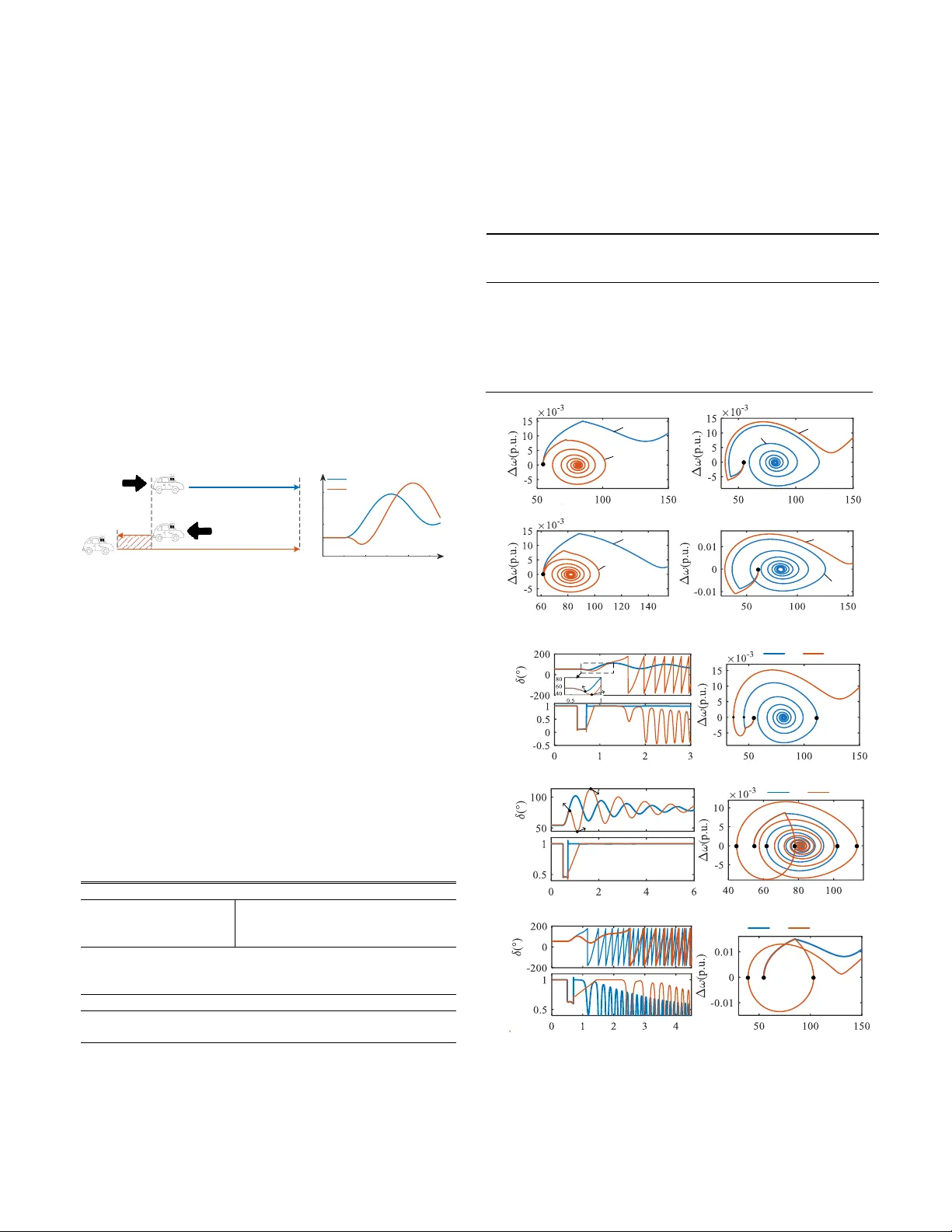
5) **스프링 효과 비유**: 저자는 이 메커니즘을 ‘스프링 효과’에 비유한다. 스프링을 뒤로 당겨 저장된 위치 에너지가 방출될 때와 같이, LVRT·복구 과정에서 IBR가 제공하는 부정적 감쇠가 저장된 감속 에너지를 방출해 추가적인 가속을 일으킨다.
6) **시뮬레이션 검증**: DIgSILENT 기반의 간소화 모델을 사용해 7가지 시나리오를 실험하였다. 주요 변수는 IBR 출력 전류 보유율(σ)과 복구 속도이다.
- **Case 1·3**: σ가 높아 ΔPw 감소폭이 작을 때, 가속 구간에서 양성 감쇠가 강화돼 첫 번째 스윙에서 안정성이 향상된다.
- **Case 2·4**: σ가 낮아 ΔPw 감소가 크게 되면 감속 구간에서 부정적 감쇠가 확대돼 두 번째 스윙부터 불안정이 급격히 악화된다.
- **Case 5·6·7**: 복구 속도가 느린 경우(0.5 p.u./s 이하)에는 감속 구간에서 에너지 누적이 크게 발생해 세 번째 스윙까지 안정성이 유지되다 급격히 전이되는 현상이 관찰되었다.
7) **논의**: 현상 발생 여부는 IBR와 SG 사이의 전기적 거리, IBR 비중, 고장 위치·형태, 전이 저항, SG 물리적 감쇠 등에 크게 좌우된다. 특히 IBR 비중이 높고 전기적 거리가 짧을수록 ΔPw 변동이 크게 나타나 다중진동 위험이 증가한다. SG의 물리적 감쇠를 강화하면 복구 단계에서 부정적 감쇠를 상쇄해 다중진동 안정성을 개선할 수 있다.
8) **결론 및 향후 과제**: LVRT·복구 제어가 SG에 제공하는 시간‑가변, 비균일 감쇠 토크는 전통적인 1차 진동 분석만으로는 포착하기 어려운 다중진동 불안정을 야기한다. 이를 완화하기 위해서는 IBR의 LVRT/복구 전략을 재설계하고, SG 감쇠를 보강하며, 시스템 설계 단계에서 IBR‑SG 배치를 최적화하는 방안이 필요하다. 향후 연구에서는 부정적 감쇠를 최소화하는 제어 알고리즘 개발과, 대규모 실제 전력망 적용을 통한 검증을 목표로 한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기