Multi-Swing Transient Stability of Synchronous Generators and IBR Combined Generation Systems
In traditional views, the build-up of accelerating energy during faults can cause the well-known first-swing angle instability in synchronous generators (SGs). Interestingly, this letter presents a new insight that the accumulation of decelerating en…
Authors: Songhao Yang, Bingfang Li, Zhiguo Hao
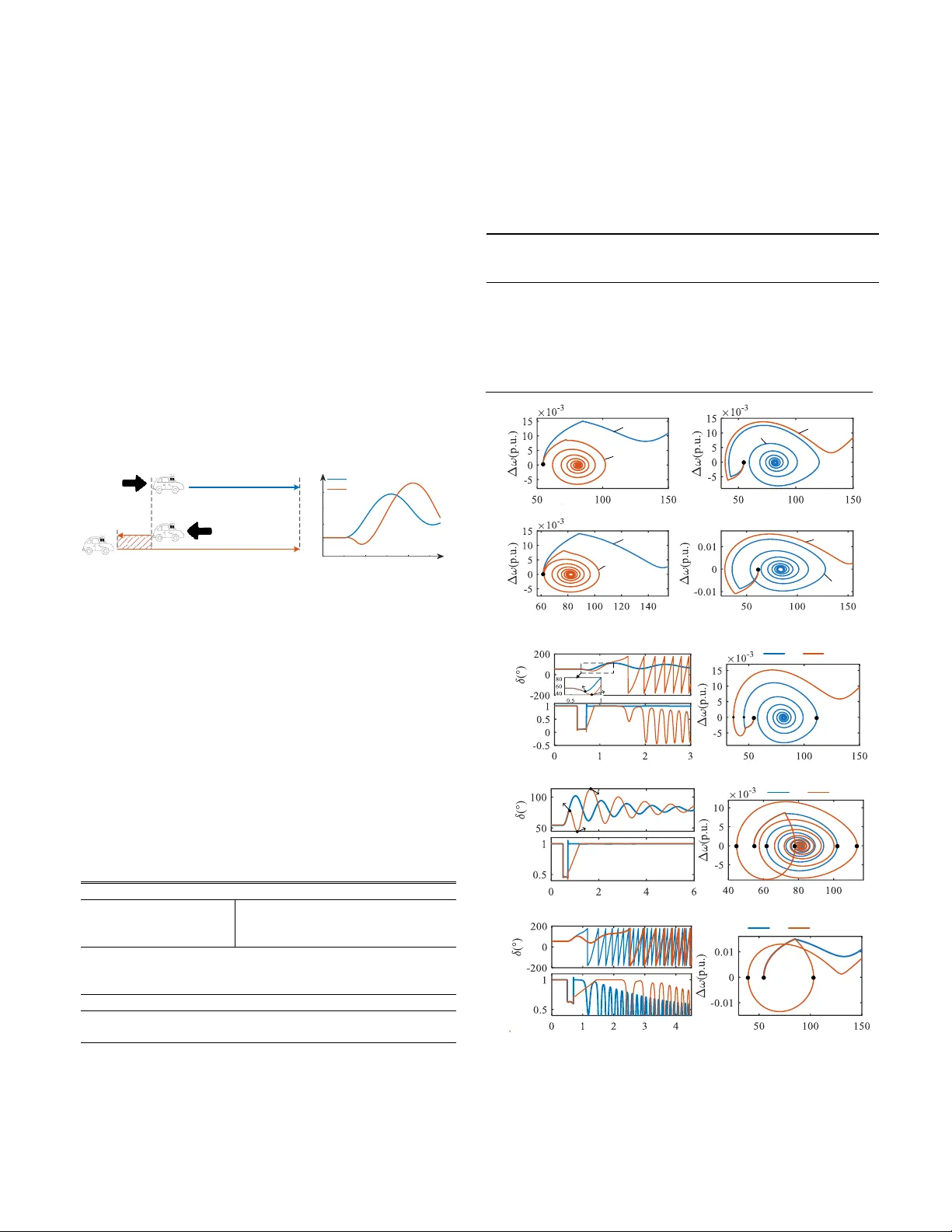
1 > REPLACE THIS LINE WI TH YOUR MANUSCRIPT I D NUMBER (DOUBLE-CLICK HERE TO EDI T) < Multi-Swing T ransient Stability of Synchronous Generators and IBR Combined Generation Systems Songhao Yang , Member , IEEE , Bingfang Li, Student Member , IEE E , Zhiguo Hao, Senior Member , IEEE , Yiwen Hu, Huan Xie, Tianqi Zhao, and Baoh ui Zhang , Fellow, IEEE Abstract — In traditional views, the build- up of accelerating energy during faults can cause the well-known first-swing angle instability in synchronous generators (SGs). Interestingly, this letter presents a new insight that the accumulation of decelerating energy due to the low voltage ri de-through (LVRT) and recovery control of grid-following inverter-based resources ( GFL -IBRs), might also result in transient angle instability in SGs. The transient energy accumulat ed during angle-decreasing swing transforms in to the accelerati on energy of the subsequent swing , hence such phenomena often manifest as multi-swing instability. Both theoretical analysis and simulation support these findings . Index Terms — synchronous generators , g rid-follow inverter-based resources , transient rotor angle stability, multi-swing, low voltage ride-through I. I NTRODUCTION ombining GFL-IBRs and SGs for centralized, long - distance transmission enhances resource flexibility and network strength. However, IBRs exhibit complex effects on the transient stability of such combined systems. Re f. [1] introduces a transient stability criterion to identify operational areas impacting system stability, while ref . [2] notes that IBRs' gradual active current restoratio n post-LVRT can enhance the first-swing stability of nearby SGs. Additionally, r ef . [3] explores the transie nt interaction of t he GFL-IBRs and virtual synchronous generators (VS G) combined systems. The existing st ud ies mainly focus on the first-swing stability. However, IB R’s time -varying output during LVRT and recovery control can c hange the un balanced power of nearby SGs, thus affecting their multi-swing dynamics. Inspired by such an idea, this letter explores the multi-swing transient instability of SGs affected by adjace nt GFL-IBR s. Utilizing the transient energ y function method, this instability phenomenon is explained by the 'Spring Eff ect', and these findings are verified by simulations. II. S YSTEM M ODELING Fig. 1 showcases a typical topology of t he IBR- SG combined system, and Fig. 2 presents the rotating vectors of the coordinate system. In Fig. 2 , the d s - q s and x-y reference frames are counterclockwise rotating with the angular speed of 𝜔 s and 𝜔 g respectively. The d s -axis leads the x -axis by an angle δ , representing SG ’s rotor angle, while the d-axis leads by an angle θ , as provide d by the PLL. Reference [1], [4] suggest that the dynamics of PLL (tens of Hz) can be ignored on the rotor motion timescale (0.1~2 Hz). Thus, the dynamic equation of the SG can be written as ( ) 1 E g s g J M PD T P = − = = − − , (1) where P M , P E , T J , and D are the mechanical power, electrical power, time constant inertia, and damping coefficient of SG , respectively. As per the definit ion P E =Re( E s ∠ δ ∙ I s ∠ s ), ( ) sin cos E s g s g s w w w sg P P P E U Y E I = − − , (2) where α= Y s / ( Y s +Y g ), Y sg =Y s Y g / ( Y s +Y g ) . P w represents the power coupling term between SG and IBR. Define I ds w = I w cos( δ - 𝜑 w ) as the project ion o f IBR’s output current vector I w ∠ w on the d s - axis, which determines the value of P w . Changes in P w further influence P E , thereby affecting the roto r dynamics of the SG. In the steady state with unity power factor contr ol, 𝜑 w = θ . During transients, if the IBR generates react ive power, 𝜑 w adjusts to θ - η as shown in Fig. 2, where η is defined as ( ) a rc ta n qd ww ii = . (3) In (3), i d w and i q w are the active and reactive output current of the IBR . SG GFL-IBR PCC s Y g Y Filter PLL Current Control GSC s E ss I gg I PQ Control s LVRT Outer-l oop Contro l Infin i te bus pp U ww I g w Y (Steady state) (During fault) gf f U 0 g U Fig. 1. Typical topology of SG -IBR combined g eneration systems. x y d q d s q s g s ww I s d w I w Fig. 2. Relationships of different frames in the vector space. III. M ULTI -S WING T RANSIENT S TABILITY A NALYSIS A . Multi-Swing Instabili ty C au sed by IBR’s LVRT Control The energy function of the syst em (1) can be formulated as ( ) ( ) 2 1 , 2 s J g sg w M V P T P P d + − − = , (4) where δ s is denoted as the sta ble equ ilibrium po int (SEP) of SG : ( ) ( ) a rc sin / s g sg M s w P EY P U =+ . (5) Assuming a grid fault shifts U g ∠ 0° to U gf ∠ f while triggers the IBR’s LVRT control, both components P sg and P w within P E would change, labelled as P sg f and P wf . C This work was supported by Science and Techno logy Project of State Grid Jib ei Electric Power Co., Ltd "Research on the coordinated control technology of grid- forming renewable energy station with new syn chronous condenser” (B3018K240005) S. Yang, B. Li, Z. Hao, Y. Hu, and B. Zhang are with Xi’an Jiaotong University, Xi'an, China (e-mail: {so nghaoyang, zhg hao, bhzhang}@xjtu.edu.cn, {libingfang, huyiwen}@stu. xjtu.edu.cn). H. Xie and T. Zhao are with Stat e Grid Hebei Electric Power Co. 2 > REPLACE THIS LINE WI TH YOUR MANUSCRIPT I D NUMBER (DOUBLE-CLICK HERE TO EDI T) < ( ) sin sg f s gf sg f P E U Y =+ , s d wf s wf P E I = . (6) As shown in Fig. 3, the intersection of curve s P e ( δ ) and P M + P w , i.e. Point A, represents the Stable Equilibrium Point (SEP). Once a fault occurs, P sg ( δ ) shifts to P sg f ( δ ). Since δ cannot change abruptly, the operating po int moves from Point A to B . After LVRT control activation, due to an increase in i q w and usually a decrease in i d w , the projection of the IBR output current vector on the d s axis, I ds wf , decreases from its steady state value I ds w , resulting in P wf < P w . According to (1)-(2), if P sg f ( δ ) < P M + P wf during the fault, then ∆ 𝜔 >0 , causi ng the SG’s rotor to accelerate; otherwise, ∆ 𝜔 <0 , causing it to decelerate. Fig. 3. Power-angle plane of the SG during IBR ’s LVRT . Define Δ P sg f =P sg f - P sg and Δ P wf =P wf - P w , generally Δ P wf <0 . The derivation of V in (4) during fault could be derived as ( ) ( ) 2 d, dd d d d g wf sgf V VV t t t P P D =+ = − − . (7) Eq.(7) indicates that the effects of Δ P wf vary with ∆ 𝜔 . Specifically, i f ∆ 𝜔 >0 , then Δ P wf ∆ 𝜔 <0, thus Δ P wf exhibits a positive damping effect, reducing V as a result . In contrast , if ∆ 𝜔 <0 , the damping effect of Δ P wf turns negative since Δ P wf ∆ 𝜔 >0 , thereby contributing to t he increase of V . (a) ∆ 𝜔 >0 during LVRT (b) ∆ 𝜔 <0 during LVRT Fig. 4. Phase trajectories of SG during IBR’s LVRT control. Fig. 5. IBR’s output under the LVRT and recovery control. Assum ing a sign change in ∆ 𝜔 marks the end of a rotor swing. Fig. 4 illustrates these s wing-dependent damping e ff ects of IBR , where the magnitude of Δ P wf is characterized by C 1 to C 4 . Fig. 4(a) shows t hat during faults, if S G accelerates, the accele rating energy is mitigate d by the positive damping effect of Δ P wf , reducing the risk of first-swing instability. Conversely, as shown in Fig. 4(b), if the SG decelerates in the first swing , the negative damping effect of Δ P wf exacerbates the risk of acceleration instability in the subsequent swing by increasing the transient (decelerating) e nergy during faults. B . Multi-Swing Instability Cau sed by IBR ’s Recovery C ontrol After the fault is cleared , P sg f reverts to P sg and IBR’s output gradually recovers under the LVRT recovery control (such as ramp recover y control in Fig. 5 ). During this stage , the power coupling term , marked as P wr , satisfie s P wf < P wr < P w . T hus, d V /d t in (7) is updated to ( ) 2 , wr g g V P D = − . (8) Define the change in transient energy over one cycle T as Δ V : ( ) ( ) 0 2 00 D V T T w r g g V w VV V d V P dt D dt = = − (9) where V 0 denotes the transie nt energy at the start of th is cycle (marked as point A in Fig. 6) . By the end of the cycle (marked as point C in Fig. 6) , V can be expres sed as ( ) ( ) 0 BC AB D g w g w V V V P t d P t d = − + + ( 10 ) Define Δ P wr ( t )= P wr ( t ) -P w . It is a time-increasing function and remains negative during the recovery phase. Besides, it’s al so a monotonic fun ction of δ resp ectively in the intervals A → B and B → C. According to the Mean Value Theorem for Integrals, ( ) ( ) 1 = B A wr wr B A P t d P − , ( 11 ) ( ) ( ) 2 = C B wr wr C B P t d P − , ( 12 ) where 1 wr P and 2 wr P are both constants and satisfies 12 0 wr wr PP . According to (7) , similar to the LVRT stage , 1 wr P exerts a negative damping effect during A → B because 1 wr P ∆ 𝜔 >0 , leading V to increase . In contrast, 2 wr P ∆ 𝜔 <0 during B → C, resulting in a reduction of V . Fig. 6. Phase trajectories of SG during IBR’s LVRT recovery. Substitute ( 10 )-( 12 ) into (9), we can obtain: ( ) ( ) ( ) 2 1 2 w r w r A B w r C A D w V V P P P V = − − + − − ( 13 ) According to ( 13 ) , the cyclic energy change ∆ V is determined by the sum of the energy change ∆ V w from IBR’s damping effects an d the energy dissipation ∆ V D from SG’s physical damping . If δ A - δ C < 0, then ∆ V > 0. Since ∆ V D >0, it follows that ∆ V w >0. If δ A - δ C > 0, ∆ V w >0 also holds because 12 0 wr wr PP and δ A - δ B > 0. This indicates that IBR’s negative dam ping effect is predominant when ∆ 𝜔 <0 , contributing to the increase in ∆ V . If ∆ V w > ∆ V D within one cycle, the multi-swing stability of SGs will deteriorate, as shown in Fig. 6. Negative 1 wr P lead to an increase in V during A → B , compared to 1 0 wr P = . Despite a decrease in V during B → C , the increase in V is more significant within one cycle. Thus, the time-varying damping effects of the IBR during the recovery 0 P M + P wf P M + P w P sgf P sg A B δ s ω <0 ω >0 ( ω >0) P M + P wf ( ω < 0) P sg 0 o Positiv e Damping Effe ct of IBR Δ P wf =C 1 Δ P wf =C 2 0 o s s Negative Damping Effect of IBR Isoen e rge t ic curve Increase of V Fault Clear ance Δ P wf =C 3 Δ P wf =C 4 (C 2 REPLACE THIS LINE WI TH YOUR MANUSCRIPT I D NUMBER (DOUBLE-CLICK HERE TO EDI T) < process increase transient (decelerating) energy during angle- decreasing swings and pote ntially lead to instability in the subsequent swing. C . In stability Mechanism Analogous t o the “ Spring Effect ” The m echanisms behind the first-swing instabili ty induc ed by excessive mechanical power (Mode 1) and the mu lti-swing instability caused by LVRT and recovery control of IBRs (M ode 2) are markedly different. This can be analogized to the “Spring Effect” seen in a pull-back toy car, as depicted in Fig. 7 . The finish line ( δ uep in Fig. 7 (a)) repres ents SG’s unstable equilibrium point (UEP). One way of play involves propelling the toy car directly to cross the finish line, where the forward thrust represents the accelerati ng energy of SGs accumulated during a large disturbance (corresponding to the scenario in Fig. 4(a)) . The othe r way is to first pull the car back and then release it . When the car is retracted, the internal spring stores potential energy, which then converts to kinetic ene rgy upon release. This backward thrust mirrors the decelerating energy in the angle-decreasing direction of SGs , resulting from the negative damping effect of IBR’s LVRT and slow recovery control, as illustrated in Fig. 4(b) and Fig. 6. (a) motion trajectories (b) δ - t curves Fig. 7. Pull-back toy car analogy for SG’s mu lti -swing instab ility. I V. N UMERICAL R ESULTS A simplified IBR-SG system test model is established in DIgSILENT, with system parameters provided in TABLE I. At t= 0.5s, a three-phase permanent short circui t occurs on one of the double circuit lines , cleared by protection at t= 0.7s. To verify the impact of GFL- IBR’s LVRT and recovery on rotor dynamics of nearby SGs, th e cases in TABL E II. are discussed . As shown in Fig. 5, during LVRT, IBR’s grid -side converter (GSC) generates reactive current based on voltage droop control [6] , while the active output is limited . In the recovery stage , reactive support is withdrawn immediately, and active current is restored using a ramp-up strategy. Different active current and recovery rates are discusse d in TABLE II. TABLE I S YSTEM P ARAMETERS Component Item (Symbol) Value GSC Proportional and integral gain PLL 50,900 Inner loop controller 1,10 Outer loop controller 0.5,10 SG Capacity 600MVA Transient reactance ( , q d XX ) 0.15,0.25 D , T J 10,8s Admittance Y s , Y w , Y g -j2.18, -j10, -j1.08 Grid Fundamental frequency ( f g ) 50Hz Base capacity 1000MVA Case 1- 4 are designed to validate the impacts of IBR’s LVRT control on the r otor dynamics and tra ns ient stability of SG, with results prese nted in Fig. 8 . In TABLE II , 𝜎 represents the retention level of active current. As 𝜎 decreases, Δ P wf also decreases. Results of Cases 1 and 3 i n Fig. 8(a) and (c) confirm the scenario described in Fi g. 4 (a): If ∆ 𝜔 >0 during the fau lt , reducing Δ P wf (or σ) introduc es positive damping, enhanci ng SG’s transient sta bility by lowering transient ener gy. Conversely, Case 2 and 4 (Fig. 8(b) a nd (d)) correspond to Fig. 4 (b): If ∆ 𝜔 <0 during the fault, a decrease in Δ P wf (or σ) results in a ne gative dampin g effect, making the SG more prone to l ose stability in the second swi ng. TABLE II S TUDY C ASES Case IBR output (MW) SG output (MW) Transition resistance (Ω) Active current reserve ( σ ) (p.u.) Recovery rate (p.u./s) 1 650 50 0 0.5,0.7 ∞ 2 650 50 0 0,0.1 ∞ 3 450 250 5 0.7,1.2 ∞ 4 450 250 25 0,0.5 ∞ 5 650 50 0 0.7 ∞ ,5 6 650 50 0 0.5 ∞ ,1 7 650 50 0 0.2 ∞ ,0.4 0.7 = 0.5 = 0.1 = 0 = 0 = 0.5 = 1.2 = 0.7 = O O O O ( ) ( ) (a) Case 1 (b ) Case 2 0.7 = 0.5 = 0.1 = 0 = 0 = 0.5 = 1.2 = 0.7 = O O O O ( ) ( ) (c) Case 3 (d) Case 4 Fig. 8. Results of IBR’s damping effect during LVRT. i w d (p.u.) time(s) ( ) 5 p.u./s B B O B B C (a) Case 5 i w d (p.u.) time(s) ( ) 1 p.u./s C B A O B A C B C (b) Case 6 i w d (p.u.) time(s) ( ) 0.4 p.u./s B O A (c) Case 7 Fig. 9. Results of IBR’s damping effect during LVRT recovery. Cases 5- 7 concentrate on examining how IBR’s LVRT recovery c ontrol impacts the ro tor dynamics of SG. Fig. 9 presents SG’s rotor angle, phase trajectory, and IBR’s active current. As depicted in Fig. 9(a) and (b), regardless of wh ether Spring Effec t t Mode 1 Mode 2 s s uep 4 > REPLACE THIS LINE WI TH YOUR MANUSCRIPT I D NUMBER (DOUBLE-CLICK HERE TO EDI T) < SG accelerates or decelerates during fa ults , a slower restoratio n of P w in the angle-decreasing swings post-fault leads to a greater accumulation of transient energy compared to immediate recovery. This is evident from the reduced minimum rotor angle of SG (from B’ to B), indicating a closer proximity to the stability boundary. In the subsequent swing with ∆ 𝜔 >0 , due to the nearly complete recovery of IBR's active current, the decrease of energy caused by IBR’s positive damping effect in this swing is less than its increase in the last swing. Therefore, the transient energy increases at the end of one cycle, pushing the SG t ow ards a potential multi-swing acce leration instabi lity. Specifically, Case 7 (Fig. 9(c)) demonst rates that the SG's instability swing is delayed from the first swing to the thir d swing under the slow recovery control. These results validate the previous analysis. V. D ISCUSSION The above analysis reveals the mechanism of IBR's LVRT and recovery control on the tr ansient e nergy of SGs and verifies the existence of multi-swing instability through simulations. However, the manifestation of this phenomenon depend s on various factors , includ ing but not limited to the electrical distance between IBR and SG , the output of IBR and SG, the type of fault, and the physical damping of SG . Firstly, a higher proportion of IBR output and closer electrical proximity between t he IBR an d SG makes the rotor dynamics of SG more sensitive to changes in 𝑃 𝑤 during the transients , th us increasing the likelihood of multi-swing instability. Additionally, different fault locations and types significantly affect SG dynamics during LVRT . In the presence of transition resistance, SGs are more likely to decelerate during a fault. Finally, the impact of SG's physical damping is pronounced during the LVRT recovery process. Increas ing SG damping not only benefits its first-swing stability but also can improve the multi-swing stability if it offsets the negative damping effect of IBR. VI. C ONCLUSION This letter offers an analytical perspective on how G FL - IBRs ’ LVRT and recovery control affect the transient stability of nearby SG s. Notably, IBR introduces a time-varying, non- uniform damping tor qu e, altering the unbalanced power during different rotor swing stages of nearby SGs and potentially leading to multi-swing instability. Mitigating these negative effects of IBRs and enhancing the overall stability of the system will be the focus of our futur e work. R EFERENCES [1] X. Ge, J. Qian, Y. Fu, W.- J. Lee, and Y. Mi, “Transient Stability Evaluation Criterion of Multi- Wind Farms Integrated Power System,” IEEE Trans. Power Syst. , vol. 37, no. 4, pp. 3137 – 3140 , Jul. 2022. [2] E. Munkhchuluun, L. Meegah apola, and A. Vahidnia, “Impact of active power recovery rate of DFIG wind farms on first swi ng rotor angle stability,” IET Gener. Transm. Distrib. , vol. 14, no. 25, pp. 6041 – 6048, 2020. [3] S. P. Me , M. H. Ravanji, M. Z. Mansou r, S. Zabihi, and B. Bahrani, “Transient Stability of Paralleled Virtual Synchronou s Generator and Grid- Following Inverter,” IEEE Trans. S mart Grid , v ol. 14, no. 6, pp. 4451 – 4466, Nov. 2023. [4] X. He and H. Geng, “Transien t Stab ility o f Power Systems Integrated With Inverter- Based Gen eration,” IEEE Trans. Power Syst. , vol. 36, no. 1, pp. 553 – 556, Jan. 2021. [5] W. Tang, J. Hu, Y. Chang, and F. Liu, “Modeling of DFIG -Based Wind Turbine for Power System Trans ient Respo nse Analysi s in Roto r Speed Control Timesc ale,” I EEE Tra ns. Po wer Syst. , vo l. 33, no. 6, p p. 6795 – 6805, Nov. 2018. [6] X. Liu, H. Xin, D. Zheng, D. Ch en, and J. Tu, “T ransient Stability of Synchronous Condenser Co- located with Ren ewable Power Plants,” IEEE Trans. Power Syst. , vol .39, no.1, pp. 203 0-2041, Jan. 2024 . Songhao Yang (Senior Member, IEEE) was born in Shandong, China, in 1989. He recei ved the B.S. and Ph.D. degrees in electrical engineering from Xi’an Jiaotong U niv ersity, Xi’an, China, in 2012 and 2019, respec-tively, and the Ph.D. degree in electrical and electronic engineering from Tokushima University, Tokushima, Japan, in 2019. He is currently an Asso ciate Professor with Xi’an Jiaotong University. His research focuse s on power system stability ana lysis and control. Bingfang Li (Student M ember, IEEE), , received the B.S. degree from North China Electric Power Universit y, Baoding, C hina, in 2022, and is currently working toward the Ph.D. degree with Xi’an Jiaotong University. Her main fields of interest include Power system stability analysis and control. Zhiguo Hao (Senior Member, IEEE), was born in Ordos, China, in 1976. He received the B.Sc. and Ph.D. degrees in electrical engi neer ing from Xi’an Jiaotong University, Xi’an, China, in 1998 and 2007, respectively . He is currently a Professor with t he Electrical Engineering Department, Xi’an Jiaotong University. His research focuses on power system protection and cont ro l. Yiwen Hu , received the B.S. degree from North China Electric Power University, Baoding, China, in 2023, and is currently working toward the M.S. degree with Xi’an Jiaotong University. Her main fields of interest include Power system stability analysis and con trol. Huan Xie , is working as an electrical engineer at State Grid Jibei Electric P ower Research Instit ute, Beijing, China. He received the B.Sc. and M .Sc. in Electrical Engineering and Automation from Hohai University in 2001 and 2014, and received Ph.D. degree in Electrical Engineering and Au tomation from Xi'an Jiao Tong University, Xi'an .China in 2008. His areas of interest include power system stabili ty and control. Tianqi Zhao , is working as an electrical engineer at State Grid Jibei Electric Power Research Instit ute, Beijing, China. He received the B.Sc., M.Sc. an d Ph.D. degree in Electrical Engineering and Automation from Tianjin University, Tianjin .China, in 2012, 2014 and 2018 respectively. His areas of interest incl ude power system stability and c on trol, renewable energy integration a nd analytical met hods for pla nning and operations.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment