무선 바이오일렉트로닉스 기반 자율 바이오하이브리드 로봇
이 논문은 살아있는 근육 조직과 인공 구조를 결합한 바이오하이브리드 로봇에 무선 전기·광 자극 및 신경‑근 접합을 이용한 제어 전략을 정리한다. 무선 전기 자극, 무선 광 자극, 그리고 신경‑근 통합 세 가지 접근법의 원리와 한계를 비교하고, 향후 신경 오가노이드와 무선 MEA를 결합한 폐쇄‑루프 자율 로봇 구현 방향을 제시한다.
저자: Hiroyuki Tetsuka, Minoru Hirano
본 논문은 살아있는 근육 조직을 인공 구조와 결합한 바이오하이브리드 로봇의 제어 기술을 전반적으로 조망한다. 서론에서는 바이오하이브리드 로봇이 심장·골격근 조직을 이용해 연성·적응형 움직임을 구현하지만, 기존 전기 펑킹이 와이어링이나 부피가 큰 전극에 의존해 폐쇄된 환경에서의 적용이 제한된다고 지적한다. 이를 극복하기 위한 무선 제어 기술의 필요성을 강조한다.
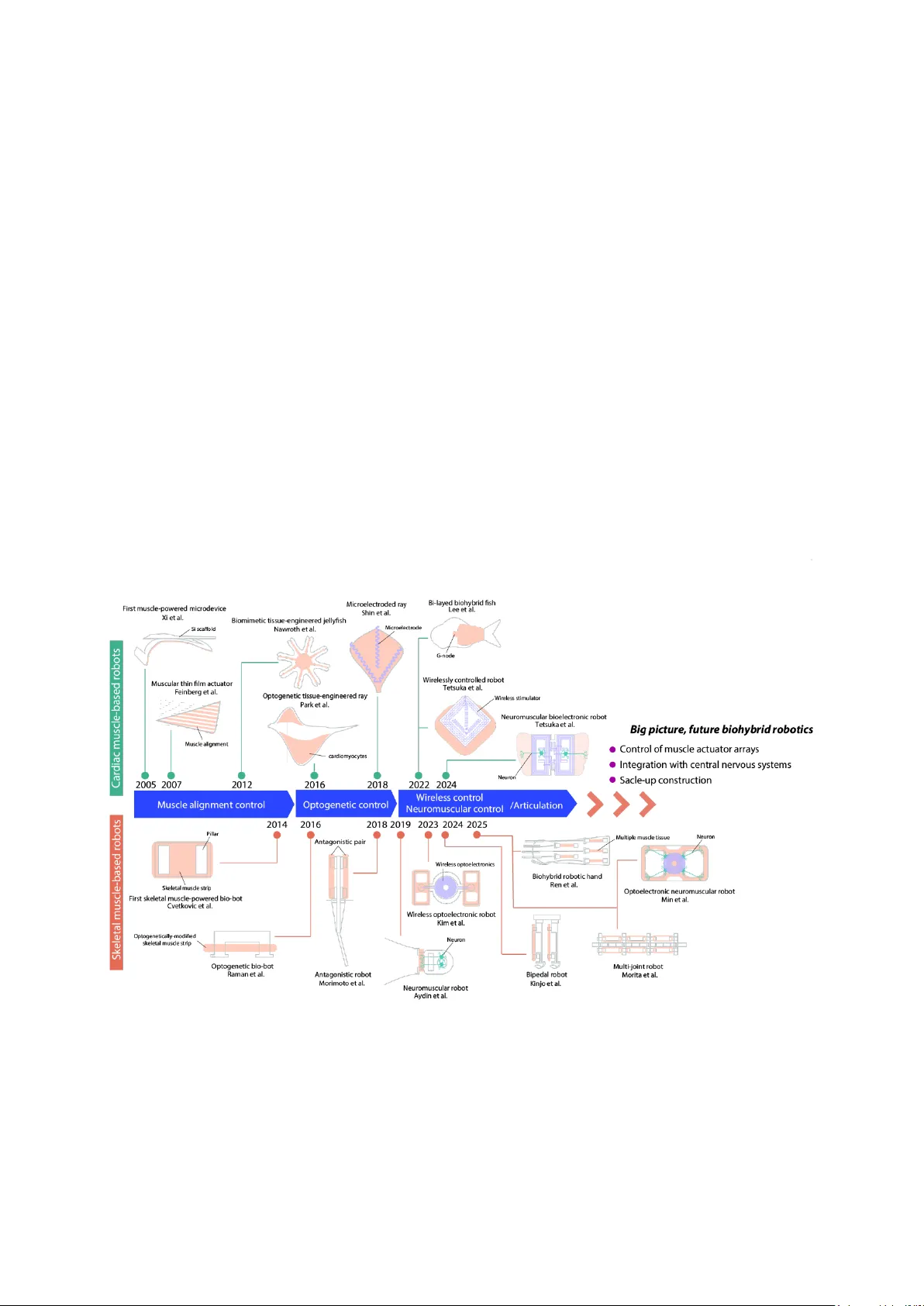
역사적 타임라인(그림 1)을 통해 초기 근육‑구동 마이크로디바이스에서 시작해 얇은 필름 액추에이터, 젤리피시형 수영 로봇, 광유전자를 이용한 광학 제어, 그리고 무선 전기·광·신경 통합까지의 발전 과정을 정리한다. 심장‑근육과 골격근 기반 로봇이 각각 독립적인 진화 경로를 가지면서도, 제어 전략에서는 공통적으로 근육 정렬, 광유전자 도입, 무선 전력 전송, 신경‑근 접합 형성이라는 단계가 반복된다.
표 1은 무선 전기 자극, 무선 광 자극, 신경‑근 통합, 그리고 미래의 오가노이드‑MEA 통합을 비교한다. 무선 전기 자극은 RF 필드 → 수신기 → 정류 → 전극 순으로 전압 펄스를 전달한다. 선택성은 전역 필드에 의존해 낮으며, 스케일업은 코일 커버리지와 거리 제한에 의해 제약된다. 폐쇄‑루프는 별도 센싱 회로가 필요하다. 무선 광 자극은 무선 전력 → μLED → 빛 순으로 진행되며, μLED 배치에 따라 다중 위치 자극이 가능하지만, 광 손실·열 관리·광유전자 필요성이 단점이다. 신경‑근 통합은 무선 명령 → 선택적 신경 자극 → 생물학적 전도 → 근육 수축으로 흐르며, 주파수·시간 분할 다중화를 통해 다중 액추에이터를 독립 제어한다. 그러나 시냅스 성숙도와 조직 유지가 핵심 과제다. 미래 오가노이드‑MEA는 양방향 전기 인터페이스를 무선화해 신경 오가노이드의 활동을 기록·자극하고, 이를 근육 구동에 피드백으로 활용한다.
시스템 수준 아키텍처(그림 2)는 네 가지 흐름을 시각화한다. (A) 무선 전기 자극은 코일 → 수신기 → 전극으로 근육을 직접 펴싱한다. (B) 무선 옵토일렉트로닉스는 코일 → μLED → 빛으로 광유전자를 활성화한다. (C) 신경‑근 통합은 무선 명령 → 신경 자극 → NMJ → 근육으로 전이한다. (D) 미래 방향은 무선 MEA와 오가노이드를 결합해 양방향 기록·자극을 수행한다.
각 제어 전략에 대한 상세 설계 고려사항을 제시한다. 무선 전기 자극에서는 전자기장 분포, 전극 임피던스, 전압·전류 한계, 그리고 조직‑스캐폴드의 기계적 대역폭을 공동 설계해야 한다. 무선 광 자극에서는 파장 선택, 광 강도·펄스 폭, 조직 내 광 감쇠, 열 방출 관리, 그리고 opsin의 발현 수준을 최적화한다. 신경‑근 통합에서는 다중 주파수 코일 설계, 신경 조직의 성숙도, 시냅스 가소성, 그리고 장기 배양 조건을 고려한다.
마지막으로, 저자는 현재 대부분의 무선 인터페이스가 일방향(자극 전용)이며, 장기간 안정적인 양방향 무선 MEA 구현이 가장 큰 기술적 난관이라고 강조한다. 이를 해결하기 위해 고밀도 360° MEA, kirigami 전자 구조, 그리고 오가노이드 기반 생물학적 연산 플랫폼을 도입하는 방안을 제시한다. 이러한 통합이 실현되면, 바이오하이브리드 로봇은 외부 센서 없이 자체적인 감각·판단·구동을 수행하는 진정한 자율 시스템으로 진화할 수 있다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기