Wireless bioelectronics for untethered biohybrid robots
Biohybrid robots integrate living tissues with engineered artificial structures to achieve organism-inspired actuation and behavior. A persistent challenge is delivering stimulation and control signals without relying on tethered wiring or bulky hard…
Authors: Hiroyuki Tetsuka, Minoru Hirano
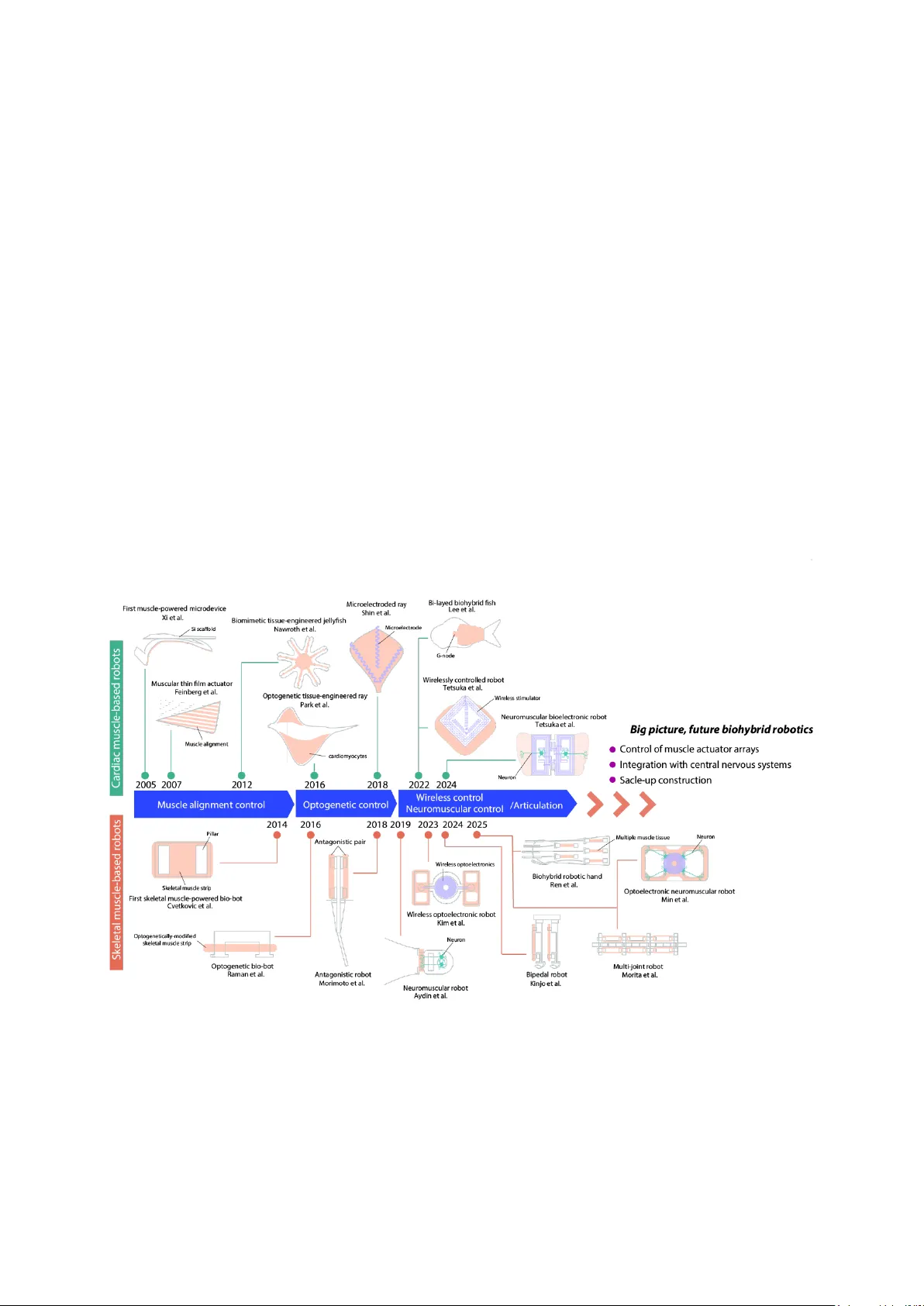
1 Wireles s bio electro nics for un tethered bi ohyb rid robo ts Hiroyu ki Tets uka* and Minoru Hirano Frontier M anag ement O ffi ce, Toyo ta Cent ral R&D Lab s ., Inc., 41-1 Yokomichi, Nagakute, Aichi 480-1192, Japan E- mail: h-tetsuka@mosk.tytlabs.co.jp Keywords: Biohybrid robots, Wireless bioelectronics, Soft Robots Abstract . Biohybrid robots integrate living tissues with enginee red artificial structures to achieve organism - inspired actuation and behavior. A persistent chall enge is delivering stimulation and control signals without relying on tethered wiring or bulky hardware i mmersed in cell - culture media. W ireless bioele ctronics addre sses this limitation by ena bling the re mote transfer of control signals, typically via radio - frequenc y magnetic fie lds, to locally stimula te muscle tissue s at tissue – electrode interf aces . In parallel , wi reless opt oel ectroni cs en ables remote control of optogenetically modified, muscle - base d robots by embedding li ght emitters that initiate muscle ac tuation thro ugh light - gated ion cha nnels. Further advances incorporate neuromuscular junctions, leveraging biological signal transduction to enable selective control of multiple actuators through wireless frequency - and time - division multiplexing. This perspecti ve art icle summarizes recent advances in control strategies for biohybrid robots — wirele ss electrica l stimulation, wir eless optic al stimulation, and neur omuscular integration — then des crib es cross - cutting design principles and highlights a future direction: co -integration of neural organoid–bioelectronics toward autonomous, closed-loop biohybrid robots. 1. Introduction Biohybrid robots embed living muscles — typi cally card iac o r skelet al m uscle t issu es —into highly pliable structures to create living machines capable of soft, adaptive behaviors like a living organism. These robots can mimic biological be haviors and function s such as a life - like stimulus – response dynamics; howe ver, achieving reliable control remains challenging. Conventional electrical pac ing generally relies on tethere d wiring or bulky electrodes immersed 2 in culture media, which limits applicability in enclosed or constrained environments, such as in vivo environments. Histo rical p erspecti ve. Over the past two decades, the field has adva nced from early proof -of- concept demonstrations of living muscle – powere d microdevices and thin - film a ctuator s to increasingly sophisticated biomimetic robots capable of swimming and walking (Fig. 1). The timelin e in F ig. 1 deline ates two para llel linea ges — car diac - and sk eletal - muscle - based systems — and trace s their evolution toward greater controllability and functional complexity. Control strategies have also evolved through different stage s. Early studies focused on controlling muscle alignment to enhance anis otropic force generation. Subsequent work introduced optogenetic approaches to enable programmable muscle activation. More recent systems integrate wireless control and neuromuscular int erfac es. Thi s eli mi nates t he need for tethers, allows operation in closed systems . Also, this enables s electi ve actuati on vi a multiplexed stimulation and neuron- mediated path ways. Figu re 1. Historica l timeline of cardiac - and skeletal - muscle - based biohybrid robots, highlighting key milestones and the evolution of control strategies from muscle alignment control to optogenetic control and, more recently, wireless and neuromuscular control. Recent advanc es a re org anized into th ree c ategor ies bas ed o n thi s tr ajecto ry: (i ) wi reless bioelectronics, (ii) wireless optoelectronics, and (iii) neuromuscular integration, each of which 3 reflects broader trends discussed on biohybrid robotics (27). We then distill practical co - des ign principles across these stra tegies and outline a future route towa rd autonomous systems based on neural organoid– wirel ess bio electron ic int egrat io n. Milesto ne - by - mil estone. To contextualize the trajectory summarized in Fig. 1, key milestones can be i nterpr eted as s uccessi ve ad vances in con trol and syst em int egrat ion. The ea rlies t muscle - powered micro dev ices dem onstrat ed th at con tractil e tis sues c an int egrate wi th microd evices and work at the microscale (1). Subsequent thi n - film muscle actuators estab lished scalable bioactuation architectures suitable for engineered locomotion (2). Biomimetic, tissue - engineer ed jel lyfis h - inspired swimmers t ranslated rhythmic contraction of cardiac muscle into efficient propulsion (3). Optogenetic, ra y - inspired systems then introduced c ontactless, spatially programmable muscle activation, enabling gait control of robots (4). Microe lectrode - integrated ray platforms further emphasized an embedded integra tion of cell stimulation electrodes and the role of distributed stim ulation interfaces in controlling locomoti on (5). Subsequent studies introduced fish - like body de signs that improved robustness and func tional integration, yielding more maneuverable biohybrid swimmers (6). Wireless stimulation then replaced tethered wiring and increased compatibility with closed environments (7). Neuromuscular bioelectronic robots further enable selective actuation through mul tiplexed wireless control and ne uron - mediated transduction, allowing steering - like control (8, 9, 10, 11). Skelet al - muscle - based robots, meanwhile, have progressed a long a distinct yet complementary route. The firs t sk eletal m uscle - powered bio -bots d emonst rated el ectric all y paced, walking - like locomotion (12). Subsequent optogenetic bio - bots introduced optical programmability (13). Antagonistic muscle architectures then expanded functionality from simple locomotion to manipulatable motions (14), while neuromuscular robots mimicked neura l innervation system of biol ogical muscl es (1 5). Wirel ess sk elet al - mu scle bas ed robot s lat er ac hieved b attery - free, remote control of multifunctional tasks (16). M ore recent bipedal and hand - like platf orms outline a path toward higher - order me chani cs, s calabl e ass embly, and com plex biomimetic behaviors (14 , 17, 18). An optoelectronic neuromuscular robot further co mbined micro -light- emitting diode (μLE D) - based wireless optoelectronics with neuromuscular pathways, illustrating a strategy for selectiv e, multi - site a ctivation (19) . 2. Wireles s contro l st rateg ies Table 1 summar izes the major direc tions , namely , wirel ess bio electro nics (wireles s elect rical stimulation), w ireless o ptoelectr onics (wirele ss opt ical stimulatio n), neur omuscular integration , 4 and a futu re co -integration concept of neural organoid – wireless bio electro nics. Wirel ess bioelect ronics offer s th e most direct and effi ci ent hardw are rout e to untet hered mu scle stimulation. However, its selec tivity is often limited b ecause stimula tion is typically governed by global fields. On the other hand, w ireless optoele ctronic s improves spatial add ressability through μLED placement and patterned illumination . But it sti ll ha s s everal pract ical ch allen ges, including the need for optogenetic modification, l oss of light intensity i n tissue, and heat generation. Neuromuscular integration further expands controllability by exploiting bi ological signal transduction, enabling selective multi - actuator control through multiplexed neur al stimulation . Howe ver, their performance becomes more dependent on tissue maturation, synapse modality, and system - level complexity. I n this sense, progression across these directions can be understood as a trade - off from simplicity and robust pacing toward higher selectiv ity, richer control, and u ltimately comp atibility with clo sed -loop autonomy. The future concept of neural org anoid – MEA integration should be viewed as a forward - looking extension of current organoid electrophysiology and biocomputing studies, rather than as a capab ilit y already est ablis hed in current technologies . R elevant preceden ts in clude cl osed - loop learning and control in i n vitro neuronal sy stems interfaced through MEAs (20 ), high - density organoid electrophysiology (21), cer ebral organoid and assembloid interfaces enabled by kirigami electronics (22), and organoid - intelligenc e frameworks for biocomputing (23). In addition, interface platforms that provide broader access to organoid activity, including 360° size - adju stabl e MEA a rchi tectures with m ulti channel coverag e, may o ffer a more su itabl e basis for organoid - based information processing than limited - contact planar configurations (24) . Nevertheless, most existing demonstrations remain wire d, and achieving stable wirele ss, high - density, stable , bidirectional organoid – MEA in terfaci ng r emains a maj or en gin eering ch all enge. Table 1. Comparative overview of wireless control strategies for untethered biohybrid robots and a future direction toward neural organoid MEA autonomy. Direct ion Signal p ath Selectivity / addres sabili ty Scale - up pa th I/O Closed - loop capabil ity Typi c al stabil ity Bottlenecks / Ref s. (1) Wirel ess bioelect roni cs (electric al stimulati on) RF field - > receiver - > rectific ation/ pul sing - > di rect electric al pacing Low - mode rate; usually 1 global field or 1 loc al paci ng sit e per recei ver; field uniform ity s ets selectivity Usually 1 receiver :1 outpu t; scaling limited by coil co verag e, standof f dist ance, and fiel d nonunif ormity Usually stimulation - only; sensing/t elem et ry add ed separa tely Open - l oop in represent ativ e systems; closed - loop ne eds a dded sensing + co ntrol ~days - we eks i n aqueous medi a Media - appropri ate electrom agne tic and circ uit c o - design is essential ; av oid overstim ulati on and electroc hemic al limits (7) (2) Wirel ess optoele ctronic s (wireles s optical stimulati on) Wireles s powe r - > micro - LED/uLE D emissi on - > Moderate - high; 1 - several emitt er sit es defined by em itter placem ent Add emitters /addr essi ng; limi ted by power bud get, heat dissi pa tion, Mainly stimulati on; communi cation / telemet ry possibl e Program mabl e open - loo p; closed- loop only when tel emetr y is added Acute to s ho rt - term / mul ti - day; lon ger us e limit ed by he at, encaps ulati on, O ptical l oss, waveleng th, irradia nce duty cycle , emitte r topolog y is a (4) (13) (16) (19) 5 optoge netic activati on and encaps ulati on and ops in stability primary lever for selectivity (3) Neurom uscula r integra tion Wireles s power/c omm an ds - > selective neural stimulati on - > biologic al transd uction t o muscle High; 2 a ctuat or arrays indepe ndently addres sed at 6.78 and 13.5 6 MH z 2 chan nels demons trate d; more vi a FDM/TDM, wi th higher spectral/ cont rol complexi ty Mainly stimulati on; recordi ng can be added; biologic al tran sducti on at the NMJ High potenti al; steerin g/spee d control s how n, but inte grate d sensing i s stil l limited >150 s sustaine d pacing i n one represent ativ e system; multi - week functi onal retenti on reported Synapse m odal ity and tissu e maturati on m atter; multipl exing strateg y shap es gait an d stee ring (8) (9) (10) (11) (15) (19) (4) Futu re: Organoi d + wireless MEA Bidirec tional MEA: stimulati on input + recordi ng output, ideall y wireless in sealed sy stem s Very high ; mul ti - site stimulation + recordi ng; MEA systems c an s pan tens - th ousan ds of electro des/cha nnel s Limited by channel count, data b andwidt h, decodin g complexi ty, a nd chronic i nterf ace stability Bidirec tional by design: m ulti - channel recordi ng + multi - site stimulation Intrinsic fi t for closed- loop control; in vit ro closed- loop learnin g/contr ol shown, b ut wireless organoi d - MEA remains prospe ctive Weeks - m onths in wired/ chr onic organoi d - MEA interfac es; long - te rm wireless stabilit y not y et shown Synaps e moda lity and tissue m aturati on matter , pl astic ity drift As shown in Fig. 2, these dire ctions can be expre ssed within a common systems - level architect ure, where the k ey di fferent iator s are (i) where t he sti mulu s is g enerated, elect rodes versus light emitters, (ii) whethe r biological transduction is levera ged, mu scle - only versus neuromuscular pathways, and (iii) whether bidirectional I/O is available to s upport closed -loop control, such as microelectrode array (MEA)-based recording and stimulation. Figu re 2. Sys tem - level architectures of wireless biohybrid robot control across three streams and a future organoid and MEA direction. (A) W ireless electrical stimulation: inductive radio 6 frequen cy powe r trans fer drives a receiv er and recti fier that gener ate pul sed el ectric al ou tput delivered through tissue - facing elect rodes t o direct ly pace m uscle t issu es. (B) Wi reless optoelec tronics: wire less power drives mic ro light - emitting diode (μLED ) emitte rs to delive r light for optogenetic activation of muscle or neurons, enabling s patial selectivity through emitter pla cement. (C) Ne uromuscular inte gration with selec tive wire less control: wir eless addressing, such as multiplexed excitation, targets neural tissues coupl ed to muscle via neuromuscular or neurocardiac junctions, leveraging biological transduction to shape actuation and enabling independent control of mul tiple actuators. (D) Future direction: organoid and wireless MEA autonomy. A bidirectional interface will re cord organoid activity and deliver stimulation patterns. This will enable the decoding and encoding of pathways for closed -loop control of muscle- based actuati on in cl osed envir onments. 2.1 Wi reless b ioelect ron ics Wireless elect rical s timu latio n is a co re approac h in wi reless bioelect ronics because i t preserves the direct control of electrical pacing without relying on wired connections, and it remains one of the most established control routes in tissue - based biohybrid robotics (26, 27). Its adv antag e is hardware simplic ity and reliable pacing i n closed and aqueous environments. Main limitations are signal selectivity, electric field nonuniformity, and electrochemical safety constra ints at the tissue – elect rode int er face. One platform has shown that wirelessly powere d, stretchable, lightweight bioelectronics c an be embedded directly into a hydrogel - based muscle tissue construct. T he system delivers controlled monophasic pulses up to ~9 V and has been used to remotely trigger locomotion in robots (7). A recent study furthe r suggests that w ireless bioelectronic dev ices can be m iniat urized wit hin a footprint of ~23 mm² while prese rving effecti ve electr ical stimulation . T he syst em generat ed d istan ce - dependent output voltag e pulse s of ~2 – 6 V, enabling wireless pacing of robot. Th is miniaturization serves as a pract ical route toward compact and media- compatib le clos ed -system biohybrid robotics (2 5). A central design consideration is the co - design of the electric field distri bution , circuit, and m uscle tissue alignment in aqueous environments. The output volt age in culture media depends strongly on the surrounding dielectric environment, ele ctrode impedance, and transmitter – r eceiver distance. The perfor mance o f wireless bioelectronic platform drops rapidly with standoff distanc e (7). E lectrica l stimulation in conduc tive media is also sen sitive to field nonuniformity and local current density. Electrode size, spacing, and placement should therefore be selected not only to exceed the stimulation threshold but also to avoid locali zed 7 hotspots, overstimulation, or unstable pacing. This matters bec ause the usable operating range is limited by stimula tion thre sholds, electrochemica l safety constr aints, and the me chanical bandwidth of the scaffold – tissue ac tuator, all of which ha ve been id entif ied as co nstraints in biohybrid robot design (26, 27). Validation should be done in the intended operating environment. Radio - frequ ency coupling efficiency and the re sulting output waveforms can differ markedly between a ir and liquid. Coil geometry and drive conditions therefore need to be optim ized together, with explicit safety mar gins, so that stimulation thr esholds are met acr oss the workspace wh ile minimizing localized hotspots that could cause ove rstimulation. Even wh en adequate electri cal p acing is achievable, controllability at the robot level is ofte n limited by muscle re laxation dy namics an d the viscoelastic response of hydrogel or scaffold composites. As a res ult, mech anical b andwi dth sets the practical upper limit on actuation frequency and should be tre ated as a primary de sign constraint. 2.2 Wi reless o ptoelec tro nics Wireless optical stimulation can be achieved using wireless optoele ctronics by integrating light sources t hat acti vate op togenet icall y modi fied m uscle t issu e. Wireles s opto electron ics ext ends remote control beyond direct electrical pacing by introducing sp atia lly progra mmable optic al stimulation. I ts major strength is improve d addr essability, be cause stimulation sites ca n be defined by µLED placement and illumination patt erns rather than by electr ic - field distr ibution alone. At the same time, t his advantage introduces additional constraints, inc luding the need for optogenetic modification, optical attenuation i n tissue and media, thermal mana gement, encapsulation reliability, and long-term opsin stability (28, 29). Previous studie s have reported that optoelectronic robots incorporating battery - free µLEDs support wir eless control and real - time communic ation (1 6). Optical stimulation offers spatia l selectivity through e mitter placement and d ecoupl es act uatio n from d irect elect rode - ti ssue con tact . From a design perspective, ef fective optoelectronic control requires co - design between the biophysical prop ertie s of light - sensitive opsins and device hardware, including appropriate choices of wavelength, irradiance, and illumination strategy for the target tiss ue (28). Light w avelengt h, ir radian ce intensity , and duty cycle directly affect activation thresholds, temporal fidelity, and optical penetration depth. In practical operation, optic al attenuation in the culture medium and th e tissue itse lf changes the d elivered light dose . Thus , the effectiv e intensity a t the actuat or may d iffer si gni ficant ly. Th ermal man agement is als o essent ial, because su stain ed illumination can produce biologically relevant he ating that perturbs tissue function and limi ts 8 long- term operational stability (29). In addition, potential phototoxic and photoche mical effects associated with prolonged high - intensity illumination should be considered when designing long- term stab le systems (28, 29). 2.3 Neural integration An integration of nervous system can m ove beyond biologically mediated control to enable selectiv e control of multiple a ctuators and mimic bio logical signal pathway . The major strength of this approach is enhanced selectivity through multiplexed neural pathways. However, the main cha llenges lie in tissue matur ation, syna ptic relia bility, and the increased complexity of maintaining stable neuromuscular function. One n otabl e appr oach u ses wireless frequ ency multiplexing to se lectively stimula te neura l tissue connected to muscle ac tuators. In the representative system, two modulation s ignals were induc ed in separate resonant coils to generat e volt age pul ses that stimulate the neural tissues. This conf iguration enabled the independent modulation of two actuator arrays, providing control over t he robots' speed and steering (8). This work also demonstrates the robustness of their signal transduction. Controlled pacing m ediate d t hrough electrical synapses was sustained longer than chemical synapses. More recently, neuromuscular junction – based biohybrid crawling robots int egrated optogenetically- modified motor neurons and sk eletal muscle with onboard wireless μLED optoelectronics, enabling optical stimulation of ne ural tissue to modula te neuromuscular actuation (19). By shifting the site o f stimulation from muscle to n eurons, optoelectronic control expands the avail able a ctuati on repert oire and red uces rel ianc e on direct muscl e pacing . This may be bene ficial w hen repeat ed di rect s timu latio n of mu scl e is und esira ble bec ause it m ay affect mus cle integr ity and limit long -term oper ation. 3. Co- desig n principle s The design of remote - controlled biohybrid robots should be guided by coupled fac tors such as signal/power transfer, selectivity, and mechanics across the control strategies described above. A central t rade - of f li es be tween si gnal/ power tran sfer an d sele ctiv ity. Wirel ess elect rical pacing prioritize s efficient transfer of signals and powe r to tissue - electrod e in terfaces . Wir eless optoel ectroni cs dis tribu te d eliver ed po wer acro ss sp atiall y arr anged emi tters t o achiev e addressability. Neuromuscular integration enhances selectivity further by exploiting biological transduction and timing control, particularly whe n combined with multiplexing schemes. In parallel, packaging and interface stability in aqueous environments often dominate system performan ce. Encaps ulation and ele ctrode performance integrity be come espec ially limiting 9 under motion, and electrical excitation conditions must also be tuned to avoid localized overstimulation. Finally, actuation and locomotion remain constra ined by tissue and structure, as scaf fold – tissue composites often limit a chievable amplitude a nd actua tion frequency through relaxation dynamics and viscoelastic properties. As such, system performance emerges from the coupled design of fields and circuits, interfaces in media, and th e mechanical properties of scaffold s. To control actuator arrays, multiple muscle actuators or multiple regions of a single actuator must be independently activated. This requires sca lable addressing schemes such as frequency multiplexing, time - division strategies, and/or spatial optic al addressing. As illustrated in Fig. 3, control of scalable actuator arrays relies on addressing approaches that trade off selectivity, powe r efficiency, and hardware complexity. Frequency multiplexing provides selectivity by matching excitation bands to multiple res onant receiv ers, wher eas ti me - division multiplexing and coded stimul ation increase channel count without additional physical interconnects. Spatial addressing , impleme nted for optically through μLED placement or electromagnetically through field shaping , of fers an alternativ e path to selec tivity but often introduces added constraints on packaging and integration. Figu re 3. Control str ategies for scalable multiple actuator arrays. Fre quency multiplexing i n which res on ant re ceiver s with differ ent cent er f requ encies en able s elect iv e drive o f mu ltip le stimulation ele ctrodes. Time - division multiple xing in which temporal scheduling or programmed waveforms offer addressability within a share d carrier band. Spatial addressing i n which selectivity activation through e mitter pl acement, such a s μLED arrays, or through electrod e arrays . 4. Chall enges and oppo rtunities These co - design constraints give rise to several challenges and opportunities. Miniaturization reduces the coupling area and consequently the energy delivered at the interf ace. This motivates the development of higher - efficien cy reso nant receiv ers, impro ve d electromagnetic field uniformity du ring exc itation, a nd interface s trategies tha t effective ly lower stimu lation 10 thresholds. One way to achie ve this may be to move stimulation up stream within the neuromuscular system. For long - term use, th e electronic s must remain relia ble while tissu e health is maintained, making chronic pac kaging integrity, biological integration, and long - term biocompatibility central design requirements (27, 30). In addition, most current platforms operate in open loop with preset stimulation sche dules. Reaching autonomous operation will therefore require integrated sensing and feedback, along with ad aptive encoding and decoding that take advantage of biological dynamics, consistent with the broader architecture of electronic neural interfaces that combine tissue inte rfacing, sensing, and signal processing (31). Togeth er, these cap abili ties en able closed -loop control. As illustrated in Fig. 4, the historical e volution summarized in Fig. 1 points to a clear roadmap from ea rly muscle - powered prototypes toward neural orga noid – enabled autonomous systems with multip le muscle a rrays. A co mpelling next step is th e emer gence of autonomous biohybrid robots in which a biological neural construct functions as an information-processing core that interacts bidirectionally via wireless bioelectronics. By incorporating the central nervous system, autonomy arises from closed - loop interaction rather than pr eprogrammed open- loop interaction. In this fra mework, wireless bioelectr onics serve as bidir e ctional interfaces, linking stimulation, rec ording, and downstream signal processing within a unified neural - interfa cing architecture (31). Environmental cues are encoded into biological neural acti vity and decoded into motor commands. A brain orga noid or neural network provides adaptiv e dynam ics and p lasti city. Meanwhi le, wi reless b ioelect ronics , such as a wireles s MEA, establish pr ogrammable in put/output (I/O) pathways. Stimulation patterns ac t as sensory surrogates, and recorded neural activity is decoded to genera te motor commands. Conceptually, the robot becomes a closed loop. This direction is motivated by several converging advances: (i) demonstrations of closed- loop learning and control using in vitro neuronal systems int erfaced via MEAs; (ii) high -density, MEA - based electrophysiological recordings of organoids sustained over weeks; (iii) chron ic recordings from organoids and assembloids enabled by kirigami electronics over months; and (iv) organoid intelligence frameworks for biocomputing. In neural organoid – wireless MEA autonomy, bidirectional input/output (I/O) is the core re quirement. However, the realization of fully wireless MEA systems capable of stable, high - density, and chronic bidirectional interfaci ng remains a si gni ficant engine ering ch alleng e, p articul arly with r espect to po wer delivery, data bandwidth, encapsulation, and long - te rm biocompatibility (30, 31). Moreover, current demonstrations of organoid – MEA integration largely rely on wired platfor ms, and translatio n to wirele ss architec tures will require careful co - o ptimization of electr onics, 11 packaging, and tissue stability. Beyond hardware considerations, meaningful closed -loop autonom y cannot be assumed to arise from simple physi cal integration of neural organoids with muscle actuators. Spontaneous orga noid activity does not inherently guarantee struc tured or task - specific motor output . N aive coupling may result in unstructured or unstable actuation. Achieving functional control will therefore depend critically on engine ered encoding –decoding strategies and adaptive c ontrol frameworks that shape and interpr et neural population dynamics rather than relying on intrinsic organization alone, especially if organoids are to be used as computational substrates rather than merely a s spontaneously active tissues (32). Thes e considerations highlight the need to move beyond simple integration and toward clearly defined, measurabl e syst em - l evel performan ce criteria. The refor e, chron ic reco rdi ng qual ity, sti mulation safety, and long - term stability should be considered p rimary perfor mance metrics. Early - stage demonstra tions will likely b enefit from low - dimensional control, such as regulating r ate and locomotion speed according to environment. Designs must explicitly ac count for nonstationarity: organoid maturation, plasticity, and drift will shift baselines ov er time , so controllers and encoding/decoding strategies should be adaptive rather than assuming fixed neural dynamics, particularly in organoid - based computing systems in which stimula tion - dependent reshaping of network dynamics is expected (32). Figu re 4. Conceptual illustration of an autonomous biohybrid robot integrating a brain organoid and a wirel ess mi croel ectro de array (MEA). B idir ectional wireles s sti mulat ion an d recordi ng of the brain organoid enables closed - loop control of movements in a muscle tis sue- based body. 5. Conclusion 12 Biohybrid robotics has progre ssed through identifiable phases of increasing controllability, from alignment - based strategie s to optogenetic control, and more recently, to wireless and neuromusc ular control layers (Fig. 1) . Wirele ss electrica l stimulation e nables robust untethered pacing, delivering monophasic pulses in aqueous environments (7). Wireless optoelectronics adds optical control channels via battery - free μLEDs, and m ore recently, onboard wireless μLED systems have enabled optogenetic neuromuscula r ac tuation (16) (19). Neuromuscular integration combined with frequency multiplexing supports selective multi - actuator control and maintains robust signal pathways ca pable of sustaining controlled actuation over long - time (8). Across t hes e appro aches , th e cent ral tr ade - off is between simplicity an d controllability: dir ect wirele ss electr ical pacing is the mo st straightforwa rd to impleme nt, optoel ectron ics improve s spatial selectivity, and neur omuscular integration offers the ric hest route to selecti ve and adaptive actuation at the cost of greater biological and system complexity. This progression motivates the future transition toward bidire ctional organoid – MEA systems for close d - loop autonomy. At present, however, most biohybrid robotic systems remain experimental in vitro platforms, opera ting in culture environments with limited for ce output, scalability, and environmental robustness. As such, they are not yet sui ted for stand -alone deployment or long - rang e autonomous exploration . T h eir n ear - term impact is more likely to lie in serving as controlled experimental testbeds for studying n euromuscular integration, embodied control, and bioelectronic interfacing. Looking forward, the realization of stable wireless MEA platforms capable of long - ter m bidirectional interfacing remains a key engineering challenge. If achieved, integra ting wireless MEA platforms with brain or ganoids offers a pathwa y to closed - loop autonomy, where biological computation and engineered bioelectronics jointly shape behavior. Together, these converging streams outline a roadmap from untethered pacing, to selective actuator addressing, and ultimately to autonomous biohybrid robots ca pable of adapti n g to their environment through embodied neural feedback. Referen ces 1. J. Xi, J. J. Schmidt, C. D. Montemagno, Self-assembled microdevices driven by muscle. Nat Mater 4, 180-184 (2005). 2. A. W. Feinberg et al., Muscular thin films for building actuators and powering devices. Science 317, 1366-1370 (2007). 13 3. J. C. Nawroth et al., A tissue-engineered jellyfish with biomimetic propulsion. Nat Biotechnol 30, 792-797 (2012). 4. S. J. Park et al., Phototactic guidance of a tissue-engineered soft-robotic ray. Science 353, 158-162 (2016). 5. S. R. Shin et al., Electrically driven microengineered bioinspired soft robots. Adv Mater 30, (2018). 6. K. Y. Lee et al., An autonomously swimming biohybrid fish designed with human cardiac biophysics. Science 375, 639-647 (2022). 7. H. Tetsuka et al. , Wirelessl y powered 3D printed hierarchical biohybrid robots with multiscale mechanical properties. Adv Funct Mater 32, (2022). 8. H. Tetsuka et al. , Wirelessl y steerable bioelectronic neuromuscular robots adapting neurocardiac junctions. Sci Robot 9, eado0051 (2024). 9. M. Bawa an d R. Raman, Taking control: Steering the future of biohybrid robots. Sci Robot 9, eadr9299 (2024). 10. C. Beyer, Biohybrid neuromuscular robots. Nat Rev Bioeng 2, 990-990 (2024). 11. N. W. Xu, Float like a butterfly, swim like a biohybrid neuromuscular robot. Sci Robot 9, eads4127 (2024). 12. C. Cvetkovic et al., Three-dimensionally printed biological machines powered by skeletal muscle. Proc Natl Acad Sci U S A 111, 10125-10130 (2014). 13. R. Ram an et al. , Opto genet ic skel etal m uscle -po wered adaptive biological machines. Proc Natl Acad Sci U S A 113, 3497-3502 (2016). 14. R. Kinjo et al. , Biohybrid bipedal robot powered by skeletal muscle tissue. Matter 7, 948-962 (2024). 15. O. Aydin et al., Neuromuscular actuation of biohybrid motile bots. Proc Natl Acad Sci U S A 116, 19841-19847 (2019). 16. Y. Kim et a l., Remote c ontrol of muscle - driven miniature robots with battery- free wireless optoelectronics. Sci Robot 8, eadd1053 (2023). 17. X. Ren et al. , Biohybrid hand actuated by multiple human muscle tissues. Sci Robot 10, eadr5512 (2025). 18. T. Morita et al. , Tetanus- driven biohybrid multijoint robots powered by muscle rings with enhanced contractile force. Sci Adv 11, eadu9962 (2025). 19. H. Min et al., Optogenetic neuromuscular actuation of a miniature electronic biohybrid robot. Sci Robot 10, eadu5830 (2025). 14 20. B. J. Kagan et al., In vitro neurons learn and exhibit sentience when embodied in a simulated ga me -world. Neuron 110, 3952-3969 e3958 (2022). 21. M. Schroter et al., Functional imaging of brain organoids using high-density microelectrode arrays. MRS Bull 47, 530-544 (2022). 22. X. Yang et al., Kirigami electronics for long-term electrophysiological recording of human neural organoids and assembloids. Nat Biotechnol 42, 1836-1843 (2024). 23. L. Smirnova, Biocomputing with organoid intelligence. Nat Rev Bioeng 2, 633-634 (2024). 24. T . Ozaki et al . , 360° size-adjustable mic roel ectrode array syst em fo r electrophysiological monitoring of cereb ral organ oids. Front Bioeng Biotechnol 13, 1596009 (2025 ). 25. H. Tetsuka et al. , Miniaturized wirele ss bioelectronics for electrica lly driven biohybrid robots. bioRxiv 2026.03.09.710657 (2026). 26. L . Gao et al . , Recent progress in engineering functional biohybrid robots actuated by living cells. Acta Biomater 121, 29-40 (2021). 27. V. A Webste r -Wood et al. , Biohybrid robots: recent progress, challenges, and perspectives. Bioinspir Biomim 18, 015001 (2023). 28. V. Emiliani e t al., Optoge netics for light con trol of biologica l systems. Nat Re v Methods Primers 2, 55 (2022). 29. S. F. Owen et al. , Thermal constraints on in vivo optogenetic manipulations. Nat Neurosci 22, 1061- 1065 (2019). 30. M. Boulingre et al. , Bi ohybrid neural interfaces: improving the biological integration of neural implants. Chem Commun 59, 14745-14758 (2023). 31. M. Zhang et al. , Electron ic neural interfaces. Nat Electron 3, 191-200 (2020). 32. H. Cai et al., Brain organoid reservoir computing for artificial intelligence. Nat Electron 6, 1032-1039 (2023).
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment