도시 환경 GNSS 위치추정을 위한 로지스틱 오류 모델
본 논문은 도시 지역에서 발생하는 다중경로·비직선 시야(NLOS)로 인한 무거운 꼬리(pseudo‑range) 오류를 가우시안 대신 로지스틱 분포로 모델링하고, 이에 기반한 최대우도 추정기인 Least Quasi‑Log‑Cosh(LQLC) 추정기를 제안한다. LQLC는 IRLS 알고리즘으로 효율적으로 해결되며, 실제 홍콩의 경량·중간·심층 도시 환경 실험에서 3차원 RMSE를 11 %–31 % 감소, STD를 27 %–61 % 감소시키는 등 기…
저자: Zhengdao Li, Penggao Yan, Baoshan Song
본 논문은 도시 환경에서 GNSS(글로벌 내비게이션 위성 시스템) 의사거리 측정이 다중경로와 비직선 시야(NLOS) 현상으로 인해 가우시안 분포가 가정하는 정상적인 오차보다 훨씬 무거운 꼬리를 보인다는 점을 출발점으로 한다. 기존 대부분의 GNSS 위치추정은 가우시안 오류를 전제로 한 최소제곱(LS) 추정기에 의존하지만, 이는 도심 고층 건물 사이에서 발생하는 큰 오차를 충분히 설명하지 못한다.
1) **오차 분포 분석**
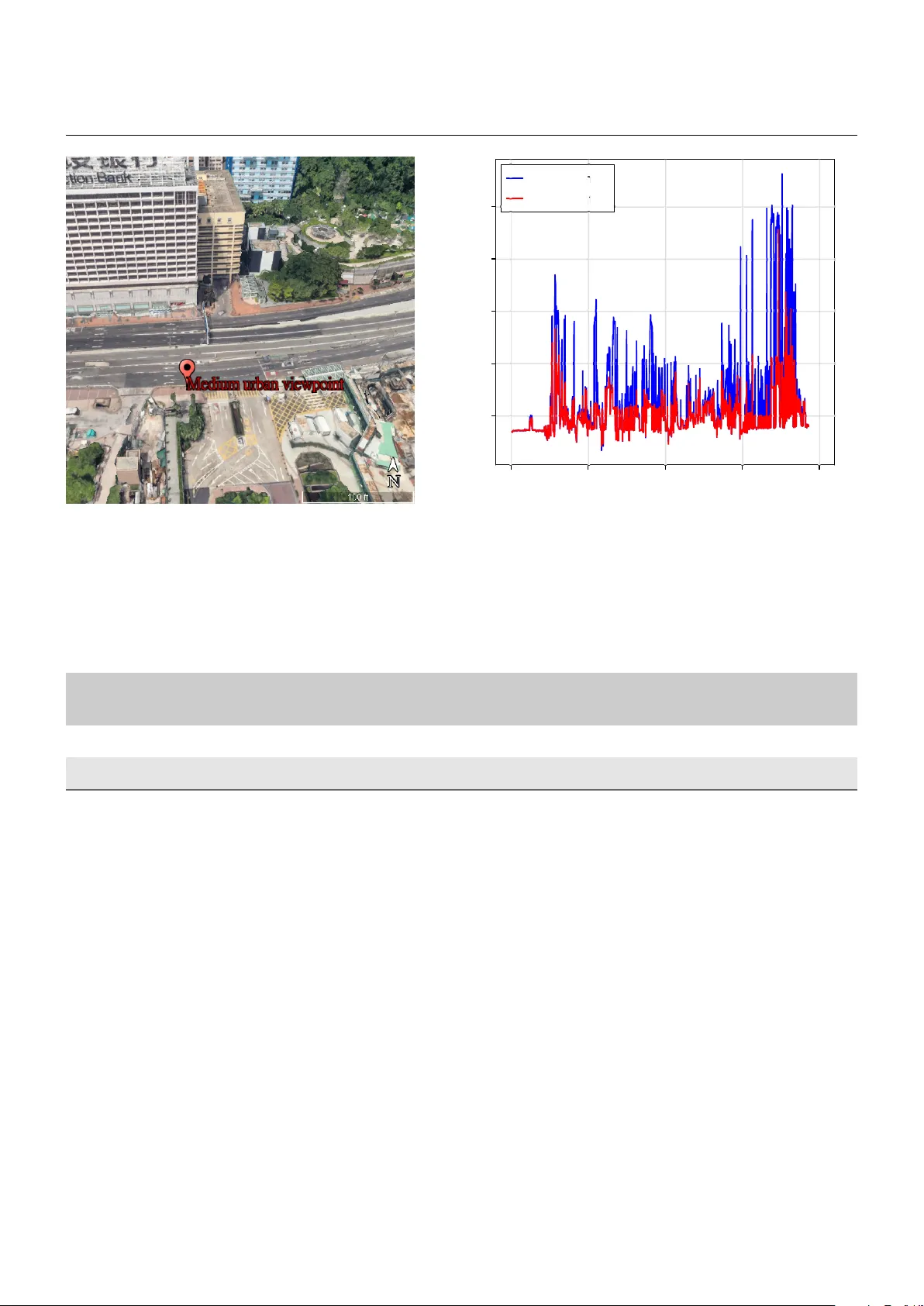
홍콩의 세 가지 도시 환경(경량, 중간, 심층)에서 u‑blox F9P 수신기로 수집한 GPS·베이더우 L1 의사거리 데이터를 50 k ~ 60 k 건씩 풀링하여 오차 분포를 추정하였다. 가우시안, 로지스틱, 이중 가우시안 혼합모델(BGMM), Student‑t 네 가지 모델을 피팅했으며, 특히 꼬리 부분에서 로지스틱이 가장 높은 적합도를 보였다. 로지스틱은 위치 파라미터 μ와 스케일 파라미터 s만을 필요로 하면서도 가우시안보다 2~3배 넓은 꼬리를 제공한다.
2) **로지스틱 기반 MLE 도출**
오차 ε_i 를 L(0, s_i) 로 가정하면, 전체 로그우도는 –∑_i ln f_L(ε_i) 가 된다. 이를 최소화하면 비용 함수 ρ(r)=ln(cosh r+1) (r는 정규화 잔차) 가 도출된다. 이는 기존 LS의 ρ(r)=½r²와 달리 큰 r에 대해 포화되는 형태이며, M‑estimator의 일종인 Least Quasi‑Log‑Cosh(LQLC) 추정기로 명명한다.
3) **IRLS 구현**
LQLC의 비용 함수는 볼록(convex)하므로 IRLS(Iteratively Reweighted Least Squares)로 전역 최소점에 수렴한다. 각 반복에서
- 현재 추정값으로부터 정규화 잔차 r_i = (y_i – H_i x̂)/s_i 를 계산,
- 가중치 w_i = tanh(r_i/2)/(r_i·s_i²) 로 업데이트,
- 가중치가 적용된 정규 방정식 (HᵀWH) x̂ = HᵀWy 를 풀어 새로운 x̂ 를 얻는다.
알고리즘은 초기 가중치를 단위행렬로 두고, 수렴 기준(가중치 변화율 < 10⁻⁶)까지 반복한다.
4) **실험 설정 및 결과**
세 도시 환경 각각에 대해 LS와 LQLC를 적용한 단일점 위치추정(SPP)을 수행하였다. 기준 위치는 고정밀 SPAN‑CPT 시스템으로 제공되었다. 평가 지표는 3차원 RMSE와 3차원 STD이며, LQLC는 모든 환경에서 평균 RMSE를 22 % (범위 11 %–31 %) 감소, STD를 44 % (범위 27 %–61 %) 감소시켰다. 특히 심층 도시에서는 가우시안이 크게 편향된 반면, LQLC는 이상치를 효과적으로 억제해 정확도가 크게 향상되었다.
5) **스케일 파라미터 민감도 분석**
실험적으로 로지스틱 스케일 s 를 실제 추정값보다 크게(1.5×~2×) 또는 작게(0.5×~0.8×) 설정한 경우를 비교하였다. 스케일을 과대설정하면 가중치가 다소 감소하지만 성능 저하가 완만한 반면, 과소설정 시 가중치가 과도하게 커져 큰 잔차가 충분히 억제되지 않아 RMSE와 STD가 급격히 악화된다. 따라서 실무에서는 “스케일을 보수적으로(과소추정보다 약간 크게) 설정”하는 것이 안전한 전략이다.
6) **계산 복잡도**
IRLS는 매 반복마다 HᵀWH 의 역행렬(또는 QR 분해) 연산을 한 번 수행한다. n(관측 수)이 수백 수준인 실제 데이터에서 평균 5~7번의 반복으로 수렴했으며, 전체 처리 시간은 8 ms 이하로 실시간 요구사항을 충족한다. 이는 기존 LS와 거의 동일한 수준이며, 추가적인 연산은 가중치 업데이트와 로그‑코시 함수 계산 정도에 국한된다.
7) **결론 및 의의**
로지스틱 분포는 가우시안보다 무거운 꼬리를 효과적으로 모델링하면서도 파라미터가 단순해 GNSS 위치추정에 바로 적용 가능하다. LQLC‑IRLS는 기존 LS 대비 견고성, 정확도, 실시간 처리 가능성 세 축을 모두 만족시키며, 특히 도심 고밀도 환경에서 큰 성능 향상을 제공한다. 향후 연구에서는 다중센서 융합(관성계, 라이다 등)과 결합하거나, 동적 스케일 추정 기법을 도입해 더욱 자동화된 시스템 구현이 기대된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기