Improved GNSS Positioning in Urban Environments Using a Logistic Error Model
A Gaussian error assumption is commonly adopted in the pseudorange measurement model for global navigation satellite system (GNSS) positioning, which leads to the conventional least squares (LS) estimator. In urban environments, however, multipath an…
Authors: Zhengdao Li, Penggao Yan, Baoshan Song
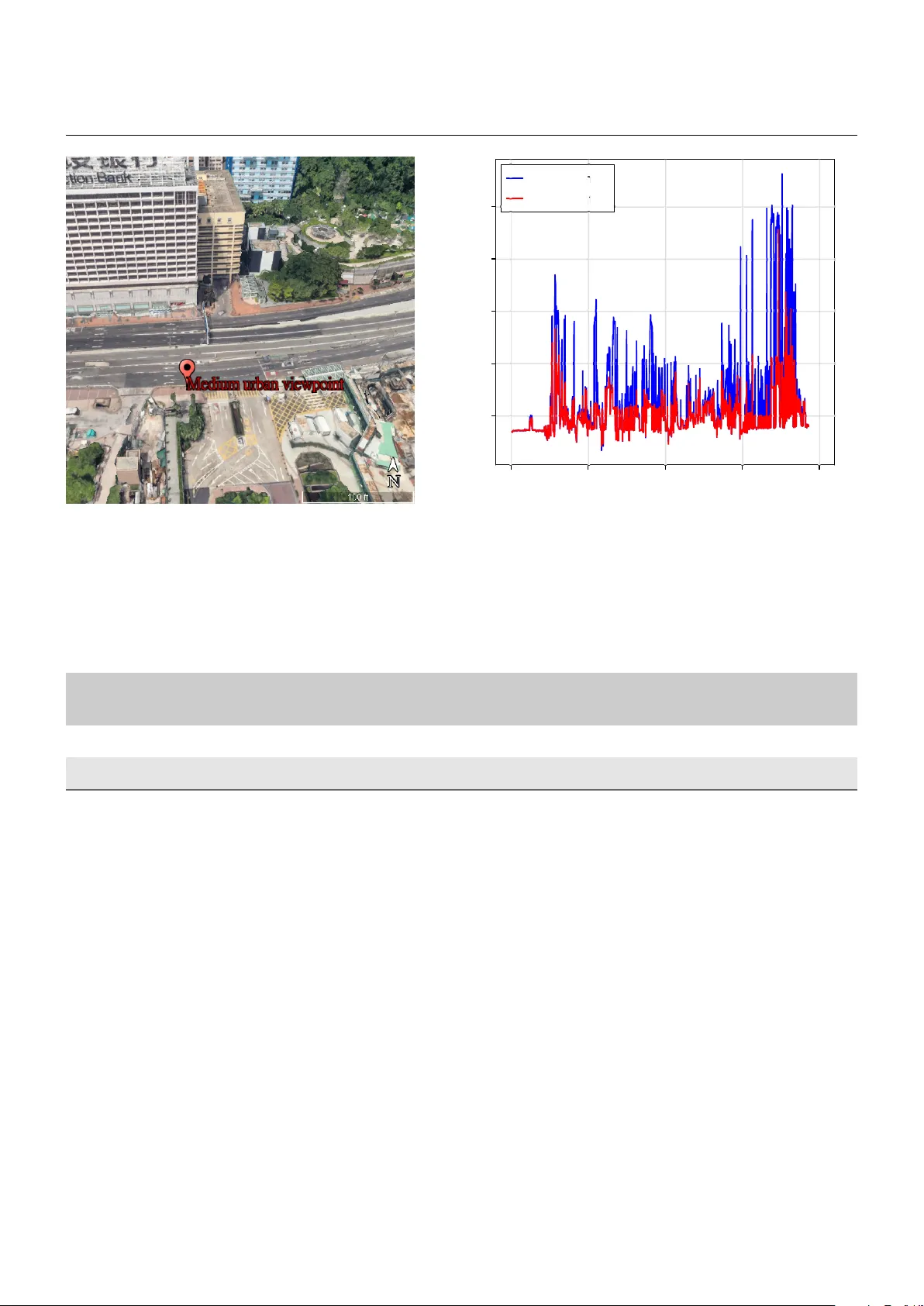
Impro v ed GNSS P ositioning in Urban En vironmen ts Using a Logistic Error Mo del Zhengdao LI, P enggao Y an, Baoshan Song and Li-T a Hsu 18th Marc h 2026 Abstract A Gaussian error assumption is commonly adopted in the pseudorange measuremen t model for global na vigation satellite system (GNSS) p ositioning, whic h leads to the conv entional least squares (LS) estimator. In urban en vironmen ts, how ever, m ultipath and non-line-of-sigh t (NLOS) receptions pro- duce hea vy-tailed pseudorange errors that are not w ell represen ted b y the Gaussian mo del. This study mo dels urban GNSS pseudorange errors using a logistic distribution and deriv es the corres- p onding maxim um lik eliho o d estimator, termed the Least Quasi-Log-Cosh (LQLC) estimator. The resulting estimation problem is solv ed efficien tly using an iteratively rew eight ed least squares (IRLS) algorithm. Exp erimen ts in light, medium, and deep urban environmen ts sho w that LQLC con- sisten tly outperforms LS, reducing the three-dimensional (3D) ro ot mean square error (RMSE) b y appro ximately 11%–31% and the 3D error standard deviation (STD) by appro ximately 27%–61%. A con trolled scale-mismatc h analysis further shows that LQLC is more sensitiv e to sev ere underestim- ation than to o v erestimation of the logistic scale, indicating that the practical tuning requiremen t is to a void ov erly small scale v alues rather than to achiev e exact scale matc hing. In addition, the com- putational cost remains compatible with real-time p ositioning. These results indicate that logistic mo deling pro vides a simple and practical alternative to Gaussian-based urban GNSS positioning. 1 In tro duction Global navigation satellite system (GNSS) p ositioning is widely used in transp ortation and lo cation- based services. F or pseudorange-based p ositioning, the conv entional formulation assumes Gaussian measuremen t errors, under whic h the maximum lik eliho o d estimator (MLE) reduces to the w ell- kno wn least squares (LS) estimator (Kaplan & Hegarty, 2006 ). Ho wev er, this assumption b ecomes questionable in urban environmen ts, where high-rise buildings and dense infrastructure frequently blo c k, reflect, and diffract satellite signals (Gro ves, 2011 ; Hsu, 2017 ; Lee & Park, 2022 ). The result- ing m ultipath and non-line-of-sigh t (NLOS) receptions can pro duce large pseudorange errors more frequen tly than the Gaussian mo del predicts and can lead to heavy-tailed error b eha vior (Crespillo 1 Zhengdao LI, P enggao Y an, Baoshan Song and Li-T a Hsu page 2 of 18 et al., 2020 ; P eretic et al., 2025 ; W eng et al., 2023 ). Consequen tly , the statistical basis of Gaussian- based p ositioning is w eakened in urban scenarios, and this issue can affect b oth p osition estimation and in tegrit y monitoring (Medina et al., 2019 ; Y an, Jin et al., 2025 ; Zhu et al., 2018 ). T o tackle this issue, urban GNSS p ositioning researc h has explored a broad range of mitigation routes. Represen tativ e directions include shadow or sidewalk matc hing with en vironmen tal con text (Gro v es, 2011 ; W eng et al., 2025 ), 3D-building-, light detection and ranging (LiDAR)-, or vision-aided NLOS mitigation (Hsu, 2017 ; W en & Hsu, 2022 ; W en et al., 2023 ), tightly coupled inertial or precise p oin t p ositioning (PPP) in tegration for challenging urban conditions (F u & Gao, 2026 ; V ana & Bisnath, 2023 ; Y o der & Humphreys, 2023 ), and pseudorange-bias estimation or m ultipath prediction (Khanaf- seh et al., 2018 ; Lee & P ark, 2022 ; Marais et al., 2013 ). In tegrit y- or optimization-oriented urban p ositioning form ulations ha ve also b een inv estigated (Gupta & Gao, 2024 ; W en & Hsu, 2021 ; Xia et al., 2024 ; Y an, Hu et al., 2025 ). Although these approac hes can impro ve p ositioning p erformance, man y of them rely on additional environmen tal information, dedicated auxiliary sensing, or more elab orate pro cessing pip elines. F rom a statistical-modeling p ersp ective, previous studies ha v e also considered replacing the Gaussian error mo del itself. Gaussian mixture mo dels (GMMs) ha ve b een used to represen t multimodal or fault-con taminated GNSS error b ehavior (Blanch et al., 2008 ; Gupta & Gao, 2024 ; Y an, Zhong & Hsu, 2025 ) and the Studen t’s-t (Dhital et al., 2013 ; T ao et al., 2025 ) and Cauch y distributions (Li et al., 2025 ), ha ve b een adopted to accommo date hea vier tails within GNSS estimation. Although these mo dels can offer improv ed empirical fit, they are less attractive when the ob jectiv e is to obtain a p ositioning estimator that is b oth statistically b etter matched and straigh tforward to implemen t. The logistic distribution is a promising candidate in this con text. Lik e the Gaussian model, it is c haracterized b y a lo cation parameter and a scale parameter, but it has heavier tails and therefore assigns higher probabilit y to large residuals (Johnson et al., 1995 ). Existing studies hav e rep orted encouraging empirical results for logistic mo deling in c hallenging GNSS environmen ts. El-Mo w afy sho w ed that the logistic distribution provided a b etter fit than the Gaussian mo del for a large sample of urban position errors (El-Mo wafy, 2020 ). The Europ ean Space Agency’s INSPIRe pro ject similarly found the logistic distribution to b e the b est o v erall fit among several commonly used statistical mo dels for pseudorange errors in cro wd-sourced GNSS datasets (Europ ean Space Agency, 2024 ). How ever, the potential of a logistic error assumption for GNSS p osition estimation remains insufficien tly explored. In this work, w e address this gap b y deriving a logistic-based MLE for the linearized pseudorange mo del. The resulting estimator, termed the Least Quasi-Log-Cosh (LQLC) estimator, belongs to the class of M-estimators (Hub er, 1981 ). Owing to the explicit form of the logistic probabilit y densit y function, the asso ciated ob jective function can b e written in closed form and solv ed efficien tly using iterativ ely reweigh ted least squares (IRLS) (Hub er, 1964 ; Maronna et al., 2019 ). The prop osed metho d is ev aluated using real GNSS data collected in light, medium, and deep urban environmen ts in Hong Kong with Global Positioning System (GPS) and Beidou L1 observ ations from a u-blox F9P receiv er. A controlled scale-mismatch analysis is further conducted to clarify the practical effect of logistic-scale mismatc h. The con tributions of this study are threefold: • A logistic-based MLE, the LQLC estimator, is deriv ed for urban GNSS p ositioning, along with an efficien t IRLS implemen tation. • The prop osed estimator is v alidated exp erimen tally in represen tative urban en vironments using Zhengdao LI, P enggao Y an, Baoshan Song and Li-T a Hsu page 3 of 18 real GNSS observ ations. • A con trolled scale-mismatc h analysis is in tro duced to examine the practical sensitivit y of LQLC to imp erfect logistic-scale fitting. The remainder of this pap er is organized as follo ws. Section 2 examines the distributional prop erties of urban pseudorange errors. Section 3 presents the LQLC estimator and its IRLS solution. Section 4 rep orts the real-data ev aluation, the computation-efficiency analysis, and the con trolled scale- mismatc h study . Finally , Section 5 concludes the paper. 2 Distributional prop erties of urban pseudorange errors This section examines the distributional c haracteristics of pseudorange errors in three represen tativ e urban environmen ts, namely light, medium, and deep urban scenarios. The purp ose is to assess whether the Gaussian mo del commonly adopted in GNSS p ositioning remains adequate under these conditions and, if not, to iden tify a simple alternative that better reflects the observed error behavior. T o this end, the empirical error distributions are compared with four candidate statistical mo dels: Gaussian, logistic, bimodal Gaussian mixture mo del (BGMM), and Studen t’s t. The data used here were collected in Hong Kong and are the same datasets later used for the urban p ositioning ev aluation. At this stage, they are in tro duced only for distribution fitting; the full data- acquisition procedure, positioning setup, and ev aluation details are pro vided in Section 4 . Within eac h urban dataset, the pseudorange measurements from all visible satellites are p o oled into a single sample and fitted using the candidate distributions. After p o oling, the ligh t, medium, and deep urban datasets contain 51,837, 57,682, and 50,517 pseudorange error samples, resp ectively . F or the BGMM, the mo del parameters are estimated using the Exp ectation-Maximization (EM) algorithm. F or the Gaussian, logistic, and Student’s t distributions, parameters are obtained through standard maxim um likelihoo d estimation. As a result, each dataset is represented by one fitted parameter set for eac h candidate mo del. Although fitting by satellite elev ation interv al is common in larger datasets, it w as not adopted here b ecause the a v ailable urban data w ould b ecome to o sparse within eac h bin to supp ort stable and reliable fitting. Pooling all measurements within eac h dataset therefore provides a more defensible basis for distribution comparison in the present study . The fitted parameters for the three urban datasets are summarized join tly in T able 1 , and the corresp onding fitted curv es are sho wn together in Figure 1 . Error [m] − 100 0 1 00 PDF 0.00 0.01 0.02 Histogram Student's T Fit BGM M Fit Gaussian Fit Lo g istic Fit (a) E rror [ m ] − 200 0 200 PDF 0.000 0.005 0.010 0.015 Histogram Student's T Fit BGMM Fit Gaussian Fit Logistic Fit (b) E rror [ m ] − 500 0 50 0 PDF 0.000 0.002 0.004 0.006 0.008 Histogram Student's T Fit BGMM Fit Gaussian Fit Logistic Fit (c) Figure 1: Fitted distributions for the urban pseudorange error datasets: (a) light urban; (b) medium urban; and (c) deep urban. Figure 1 sho ws that the Gaussian mo del already departs visibly from the empirical tails in the ligh t urban dataset, whereas the logistic, BGMM, and Student’s t mo dels provide more plausible fits. Zhengdao LI, P enggao Y an, Baoshan Song and Li-T a Hsu page 4 of 18 T able 1: Fitted distribution parameters for the ligh t, medium, and deep urban datasets. Fitted distribution Ligh t urban Medium urban Deep urban Gaussian ( µ, σ ) (0 . 33m , 18 . 49m) ( µ, σ ) ( − 12 . 95m , 45 . 47m) ( µ, σ ) ( − 56 . 91m , 71 . 36m) BGMM p 1 = 0 . 93 µ 1 = 0 . 82m σ 1 = 13 . 97m µ 2 = − 6 . 25m σ 2 = 47 . 72m p 1 = 0 . 14 µ 1 = − 30 . 00m σ 1 = 103 . 51m µ 2 = − 10 . 27m σ 2 = 25 . 58m p 1 = 0 . 79 µ 1 = − 60 . 83m σ 1 = 46 . 08m µ 2 = − 41 . 71m σ 2 = 127 . 68m Studen t’s t ( c, λ, ν ) (0 . 46m , 13 . 58m , 4 . 68) ( c, λ, ν ) ( − 10 . 64m , 24 . 40m , 2 . 50) ( c, λ, ν ) ( − 59 . 00m , 46 . 74m , 3 . 18) Logistic ( m, s ) (0 . 42m , 9 . 52m) ( m, s ) ( − 11 . 66m , 21 . 28m) ( m, s ) ( − 58 . 54m , 36 . 33m) This discrepancy b ecomes more evident in the medium urban dataset and is most pronounced in the deep urban dataset, where the Gaussian model is clearly inadequate for represen ting the observ ed error distribution. Across all three scenarios, the urban pseudorange errors therefore exhibit clear hea vy-tailed c haracteristics. Among the candidate mo dels, BGMM and Studen t’s t provide flexible descriptions of the empirical distributions, particularly in the tails. Ho w ever, this flexibility comes at the expense of increased mo del complexity or a less con venien t estimation structure for p ositioning. The logistic distribution offers a more practical compromise. It captures the hea vy-tailed behavior more faithfully than the Gaussian mo del while retaining a simple lo cation-scale parameterization similar to the Gaussian case. F or the purp ose of estimator design, this com bination of empirical adequacy and model simplicity mak es the logistic distribution the most suitable c hoice in the presen t study . These observ ations motiv ate the estimator developed in the next section. Since the logistic distribu- tion pro vides a more realistic y et still tractable description of urban pseudorange errors, it is natural to derive the GNSS p ositioning estimator directly from a logistic error assumption rather than from the con v en tional Gaussian mo del. 3 Least Quasi-Log-Cosh (LQLC) Estimator 3.1 Basis of M-estimator for GNSS p ositioning F or n satellites in view, the linearized GNSS pseudorange measuremen t mo del is written as y = Hx + ε , (1) where y is the v ector of differences b et ween the measured and predicted pseudoranges, H is the geometry matrix, x is the state vector con taining the user p osition and clo ck bias, and ε is the measuremen t error v ector. Zhengdao LI, P enggao Y an, Baoshan Song and Li-T a Hsu page 5 of 18 Under a sp ecified probabilistic mo del for the measuremen t errors, the unknown state v ector x can be estimated b y maxim um lik eliho o d estimation (MLE). The resulting estimator b elongs to the general class of M-estimators (Hub er, 1964 ), which can b e written as ˆ x = argmin n X i =1 J i y ( i ) − H ( i, :) x ν i = argmin n X i =1 J i ( ¯ r i ) , (2) where J i is the loss function, ν i is the scale parameter asso ciated with the i th observ ation, and ¯ r i is the normalized residual (Crespillo et al., 2020 ). The subscript ( i ) denotes the i th element of a v ector, whereas ( i, :) denotes the i th ro w of a matrix. This notation is used throughout the pap er. 3.2 Construction of LQLC estimator Motiv ated b y the heavy-tailed empirical b ehavior shown in the previous section, each measuremen t error is mo deled using the logistic distribution. Its probability density function (PDF) f L and cum ulativ e distribution function (CDF) F L , with location parameter m and scale parameter s , are giv en b y f L ( x ; m, s ) = e − x − m s s 1 + e − x − m s 2 = 1 s e x − m s + e − x − m s + 2 , (3) F L ( x ; c, s ) = 1 1 + e − x − m s . (4) If the individual measurement errors are assumed to follo w a zero-mean logistic distribution, ε ( i ) ∼ L(0 , s i ) , ∀ i ∈ [1 , n ] , (5) then maximizing the likelihoo d is equiv alent to minimizing the negativ e log-lik eliho o d, whic h yields ˆ x = argmin n X i =1 ln cosh y ( i ) − H ( i, :) x s i + 1 = argmin n X i =1 J QLC,i , (6) where J QLC,i denotes the quasi-log-cosh (QLC) loss for the i th observ ation. W e refer to the resulting estimator as the Least Quasi-Log-Cosh (LQLC) estimator. The corresp onding MLE deriv ation is summarized in Appendix A . 3.3 Numerical solution for LQLC estimator 3.3.1 Comparison b et ween the LS and LQLC estimators T able 2 and Figure 2 summarize the M-estimator forms induced by the Gaussian and logistic error assumptions. Under the Gaussian mo del, the cost function is quadratic, the influence function increases linearly with the residual, and the induced w eighting function remains constan t. This leads Zhengdao LI, P enggao Y an, Baoshan Song and Li-T a Hsu page 6 of 18 to the con v entional LS estimator. Under the logistic mo del, ho wev er, the cost function b ecomes quasi- log-cosh, the influence function is b ounded by the hyperb olic tangen t term, and the corresponding w eigh t decreases with increasing residual magnitude. Therefore, the difference b et ween LS and LQLC is not only a c hange of likelihoo d mo del, but also a c hange in how large residuals are treated during estimation. This comparison also explains wh y LQLC can still b e solved within an iterativ ely rew eigh ted least squares framew ork, whic h is described next. Figure 2: Visual comparison of the cost, influence, and weigh ting functions induced by the Gaussian and logistic error mo dels. The LQLC estimator retains a smo oth con vex cost, while its influence and w eigh ting functions b ecome progressiv ely b ounded for large normalized residuals. T able 2: Cost, influence, and weigh ting functions of the M-estimators induced b y Gaussian and logistic error assumptions. Assumed error mo del Estimator given b y MLE Cost function ( ρ ( r ) ) Influence function ( ψ ( r ) ) W eighting function ( w ( r ) ) Gaussian LS 1 2 r 2 r 1 Logistic LQLC ln (cosh( r ) + 1) tanh r 2 tanh ( r 2 ) r 3.3.2 IRLS solver for LQLC estimator As indicated b y the residual-dep enden t w eighting structure in Figure 2 and T able 2 , the prop osed LQLC estimator can b e solv ed efficien tly b y iterativ e rew eighted least squares (IRLS) (Maronna et al., 2019 ). The k ey deriv ation is summarized b elow. Starting from Equation ( 2 ), a necessary optimalit y condition is obtained b y setting the first deriv ative with resp ect to x equal to zero: n X i =1 ∂ J i ( ¯ r i ) ∂ x = n X i =1 ∂ ¯ r i ∂ x ⊤ ∂ J i ( ¯ r i ) ∂ ¯ r i = 0 . (7) By in tro ducing the influence function ψ i ( ¯ r i ) = ∂ J i ( ¯ r i ) ∂ ¯ r i , Equation ( 7 ) can b e rewritten as n X i =1 ∂ ¯ r i ∂ x ⊤ ¯ r i · ψ i ( ¯ r i ) ¯ r i = 0 . (8) Zhengdao LI, P enggao Y an, Baoshan Song and Li-T a Hsu page 7 of 18 If the ratio ψ i ( ¯ r i ) ¯ r i is treated as a constan t computed from the residuals of the previous iteration, then the problem is conv erted into a w eighted least-squares form. Defining w i = ψ i ( ¯ r i ) ¯ r i , (9) the corresp onding iterativ e subproblem becomes ˆ x = argmin n X i =1 w i ( ¯ r i ( x )) 2 . (10) F or the normalized residual ¯ r i = y ( i ) − H ( i, :) x ν i , Equation ( 10 ) yields the weigh ted normal equation H ⊤ W ( y − Hx ) = 0 , (11) where W is diagonal with entries W ( i,i ) = w i ν 2 i . Therefore, each IRLS iteration up dates the state estimate according to ˆ x = H ⊤ WH − 1 H ⊤ Wy . (12) F or the LQLC estimator, the loss function is J QLC ( r ) = ln(cosh( r ) + 1), and the corresp onding influence and weigh ting functions are ψ QLC ( r ) = tanh r 2 , w QLC ( r ) = tanh r 2 r . (13) Hence, large normalized residuals are assigned smaller weigh ts automatically , whic h giv es the estim- ator its robustness to multipath-con taminated observ ations. Because the QLC loss is con vex, the IRLS pro cedure conv erges to the unique minimizer of the ob jectiv e. The corresp onding implement- ation is summarized in Algorithm 1 . Algorithm 1 LQLC estimation using IRLS 1: Initialize W=I 2: while no con vergence is reac hed do 3: Compute the v ector of delta pseudorange y , and observ ation matrix H 4: Compute w eigh ted least-squares (WLS) solution ˆ x = H ⊤ WH − 1 H ⊤ Wy 5: Compute eac h residual r i = y ( i ) − H ( i, :) ˆ x s i 6: W ( i,i ) ← tanh r ( i ) 2 s 2 i r ( i ) 7: end while 4 Exp erimen t and results 4.1 Exp erimen t setting The prop osed metho d was ev aluated using the same three Hong Kong urban datasets in Section 2 . The datasets were collected in light, medium, and deep urban scenarios, which represent increasing Zhengdao LI, P enggao Y an, Baoshan Song and Li-T a Hsu page 8 of 18 lev els of signal obstruction and m ultipath con tamination. F or eac h dataset, a u-blo x F9P receiv er w as used to track GPS and Beidou L1 signals, and a high-precision SP AN-CPT reference system pro vides the ground truth. F or eac h dataset, the Gaussian and logistic parameter sets obtained from the po oled distribution fitting in Section 2 were used in the corresp onding LS and LQLC based single p oint p ositioning (SPP) solutions. The resulting positioning performance was compared using the three-dimensional ro ot mean square error (RMSE) and the three-dimensional error standard deviation (STD). All p ositioning algorithms were implemen ted and tested on a PC equipped with an Intel Core i7-1355U pro cessor. 4.2 P ositioning results comparison 4.2.1 Ligh t urban Figure 3 a shows that the ligh t urban test site is lo cated on a w aterfron t promenade, with op en sky on one side and tall buildings and construction works on the other. This geometry creates a mixed propagation en vironment in whic h direct and reflected signals co exist, pro ducing a representativ e but comparativ ely mo derate urban positioning challenge. (a) Time [Epoch] 0 1000 2000 3000 3D Error [m] 25 50 75 100 LS solution LQLC solution (b) Figure 3: Analysis of the ligh t urban dataset collected at the latitude, longitude, and height (LLH) p osition of (22.293079, 114.17489, 3.0m): (a) Go ogle Earth snapshot of the receiver’s surroundings; (b) 3D positioning errors given by LS and LQLC estimators Figure 3 b shows the 3D p ositioning errors of LS and LQLC o v er the observ ation p eriod. The LS solution exhibits clear instability , with rep eated error spikes b etw een appro ximately 60 m and 120 m, esp ecially b etw een ep o chs 1200 and 2700. By contrast, the LQLC solution v aries more moderately and suppresses the largest excursions, with a maxim um error b elo w 55 m. Zhengdao LI, P enggao Y an, Baoshan Song and Li-T a Hsu page 9 of 18 T able 3: Comparison b etw een LS and LQLC p ositioning solutions in the light urban environmen t. Metric LS solutions LQLC solutions P ercen tage of reduction 3D RMSE 34.82m 30.96m 11.06% 3D STD 11.13m 4.45m 59.99% In single-p oint p ositioning, suc h spik es are t ypically asso ciated with m ultipath-contaminated pseu- dorange measurements. Because LS is derived under a Gaussian error mo del, it remains sensitive to large residuals that are assigned very low probabilit y under that assumption. The LQLC estimator is less affected b y these observ ations b ecause the logistic mo del tolerates large residuals more naturally and the IRLS solution down-w eights them according to their magnitudes. The quan titative results in T able 3 confirm this pattern. LQLC reduces the 3D RMSE from 34.82 m to 30.96 m, corresp onding to an 11.06% improv ement, and reduces the 3D STD from 11.13 m to 4.45 m, corresp onding to a 59.99% improv ement. The ligh t urban dataset therefore establishes the practical feasibilit y of the logistic-based estimator and already indicates a mark ed gain in p ositioning stabilit y . It is also w orth noting that LS p erforms competitively during a small p ortion of the dataset, par- ticularly in short in terv als where the observ ations app ear to b e less affected by m ultipath. This b eha vior is consisten t with the Gaussian mo del remaining suitable when line-of-sight measurements dominate. Even in suc h in terv als, ho wev er, the ov erall performance of LQLC remains comparable, indicating that the logistic formulation impro ves robustness without imp osing a substantial p enalty under relativ ely b enign urban conditions. 4.2.2 Medium urban Figure 4 a shows that the medium urban site is lo cated b eside a high-rise building and dense v egeta- tion. Relative to the light urban case, this environmen t forms a partial urban can y on and pro duces more p ersistent diffraction and reflection effects. Figure 4 b sho ws that the contrast b etw een LS and LQLC b ecomes more pronounced in this setting. LS now exhibits frequent error spik es ab ov e 200 m, with a peak close to 280 m near ep o c h 3500. The LQLC solution remains more stable and limits most spik es to b elo w 150 m. The stronger separation b et ween the tw o estimators is consisten t with the exp ectation that the b enefit of a hea vier-tailed error mo del b ecomes more visible as con taminated measuremen ts o ccur more frequen tly . T able 4 sho ws that these qualitative differences translate into substan tial metric impro veme nts. The 3D RMSE is reduced from 74.71 m to 51.84 m, a 30.61% reduction, while the 3D STD decreases from 42.12 m to 16.49 m, a 60.84% reduction. Compared with the ligh t urban case, the medium urban results more clearly demonstrate the adv an tage of the logistic-based estimator as the level of environmen tal degradation increases. Notably , the STD reduction remains close to 60% in b oth the ligh t and medium urban datasets, suggesting that the main adv antage of LQLC lies not only in reducing av erage error, but also in suppressing the large and irregular excursions that mak e urban p ositioning unreliable in practice. Zhengdao LI, P enggao Y an, Baoshan Song and Li-T a Hsu page 10 of 18 (a) Time [Epoch] 0 1000 2000 3000 4000 3D Error [m] 50 100 150 200 250 LS solution LQLC solution (b) Figure 4: Analysis of the medium urban dataset collected at the LLH p osition of (22.294614, 114.173417, 3.0m): (a) Go ogle Earth snapshot of the receiver’s surroundings; (b) 3D p ositioning errors giv en b y LS and LQLC estimators T able 4: Comparison b etw een LS and LQLC p ositioning solutions in the medium urban en vironment. Metric LS solutions LQLC solutions P ercen tage of reduction 3D RMSE 74.71m 51.84m 30.61% 3D STD 42.12m 16.49m 60.84% 4.2.3 Deep urban Figure 5 a sho ws that the deep urban site is surrounded by high-rise buildings and represents the most c hallenging en vironmen t among the three datasets. Sev ere signal blo c k age, NLOS reception, and strong m ultipath con tamination are all prev alent in this scenario. Figure 5 b sho ws that b oth estimators degrade substantially under these conditions, with frequent error spik es exceeding 200 m. The LS solution o ccasionally exceeds 400 m, whereas the LQLC solution generally remains low er and limits the largest excursions to ab out 300 m. The b enefit of LQLC is therefore still visible, although the margin betw een the tw o metho ds narro ws compared with the light and medium urban cases. The quantitativ e comparison in T able 5 confirms this interpretation. LQLC reduces the 3D RMSE from 131.92 m to 112.85 m, corresp onding to a 14.46% impro vemen t, and reduces the 3D STD from 62.16 m to 45.32 m, corresp onding to a 27.10% impro v ement. These gains are smaller than those in the light and medium urban datasets, indicating that very severe urban error pro cesses c hallenge b oth Gaussian and logistic mo dels. Nev ertheless, LQLC contin ues to outp erform LS in b oth accuracy and precision across all three urban scenarios. A p ossible reason for the reduced p erformance is that, in a deep urban cany on, the frequency and Zhengdao LI, P enggao Y an, Baoshan Song and Li-T a Hsu page 11 of 18 sev erit y of corrupted measuremen ts can exceed the tail b eha vior anticipated b y b oth the Gaussian and logistic mo dels. Under such conditions, no simple single-distribution mo del can fully absorb the underlying propagation complexit y . The deep urban results therefore suggest both the practical v alue of LQLC and the remaining difficulty of urban GNSS p ositioning under extreme signal degradation. (a) Time [Epoch] 0 1000 2000 3000 3D Error [m] 0 200 400 LS solution LQLC solution (b) Figure 5: Analysis of the deep urban dataset collected at the LLH p osition of (22.296989, 114.17230, 3.0m): (a) Go ogle Earth snapshot of the receiv er’s surroundings; (b) 3D p ositioning errors giv en b y LS and LQLC estimators T able 5: Comparison b etw een LS and LQLC p ositioning solutions in the deep urban environmen t. Metric LS solutions LQLC solutions P ercen tage of reduction 3D RMSE 131.92m 112.85m 14.46% 3D STD 62.16m 45.32m 27.10% 4.3 Computation efficiency analysis The computational cost of the proposed LQLC estimator was compared with that of LS on an In tel Core i7-1355U pro cessor. F or eac h urban dataset, one fixed p ositioning instance w as rep eatedly pro cessed in 1000 Mon te-Carlo runs so that b oth the conv ergence iterations and the execution times could b e examined under the same op erating condition. Figure 6 shows the iteration coun ts required for conv ergence of eac h estimator. The LS estimator con v erges more rapidly in terms of iteration coun t. Across the three urban datasets, the LS solution t ypically conv erges at approximately 10 0 . 7 iterations, whereas LQLC generally requires ab out 10 1 . 5 iterations. Since both estimators use the IRLS solver, this difference is attributed to the error-mo del- induced weigh ting behavior. F or LS, the Gaussian error mo del leads to a constan t w eighting function, Zhengdao LI, P enggao Y an, Baoshan Song and Li-T a Hsu page 12 of 18 so the iterativ e update remains comparativ ely simple once the linearized model is formed. F or LQLC, ho w ever, the logistic error model leads to residual-dep enden t weigh ts that must b e adjusted as the curren t residuals change. As a result, the solver needs more iterations to settle to a stable con vergence p oin t. Ev en so, the increase remains moderate rather than excessiv e. Ev en in the deep urban dataset, the required n umber of iterations stays within a limited range, indicating that the conv ex QLC loss preserv es stable con v ergence b ehavior despite the more inv olved weigh ting pro cess. Iteration Number 10 0.0 10 0.5 10 1.0 10 1.5 3D Posit i o n Fix [m] 10 − 10 10 − 5 10 0 10 5 (a) Iteration Number 10 0.0 10 0.5 10 1.0 10 1.5 10 2.0 3D Posit i o n Fix [m] 10 − 10 10 − 5 10 0 10 5 (b) Iteration Number 10 0.0 10 0.5 10 1.0 10 1.5 3D Posit i o n Fix [m] 10 − 10 10 − 5 10 0 10 5 (c) Figure 6: Iteration coun ts required for conv ergence o ver 1000 rep eated runs of one fixed p ositioning instance, comparing LS (blue) and LQLC (red) in the (a) light, (b) medium, and (c) deep urban datasets. The practical consequence of this iteration gap is shown in Figure 7 , whic h plots the av erage com- putational time of each estimator. As expected, the mean runtime of LQLC is consistently higher than that of LS in all three urban datasets. Ho wev er, the difference remains small in absolute terms. The av erage computational time of b oth estimators stays b elo w 2 . 5 × 10 − 4 s p er ep o ch, which is fully compatible with real-time single-ep o ch p ositioning. Therefore, although the logistic-based estimator requires more iterations, the resulting computational burden remains mo dest from an operational p ersp ective. Figure 7 also rev eals a difference b etw een the t wo estimators in the disp ersion of the runtime statistics. The boxplots show that the standard deviation of the LQLC execution time is slightly smaller than that of LS. A plausible explanation is that, although LQLC requires more iterations on a verage, its residual-dep enden t w eighting suppresses the influence of extreme observ ations and mak es the iterative tra jectory more rep eatable ov er the 1000 runs. By contrast, the constan t weigh ting function used b y LS do es not atten uate large residuals in the same w ay . When the fixed p ositioning instance con tains stronger outlying effects, the corresp onding up dates can b e p erturb ed more noticeably , whic h increases the spread of the LS runtime distribution. This behavior suggests that LQLC not only remains computationally feasible on av erage, but also exhibits relatively stable computational p erformance in c hallenging urban en vironments. 4.4 Con trolled scale-mismatc h sensitivit y analysis The real-data exp eriments ab o ve show that LQLC impro ves urban p ositioning p erformance in ligh t, medium, and deep urban conditions. T o complemen t that evidence, a controlled Monte Carlo analysis Zhengdao LI, P enggao Y an, Baoshan Song and Li-T a Hsu page 13 of 18 Estimator LS LQLC Ave r age computational time [ s] 10 − 4.75 10 − 4.50 10 − 4.25 10 − 4.00 (a) Estimator LS LQLC Avera ge computational time [ s ] 10 − 4.6 10 − 4.4 10 − 4.2 10 − 4.0 10 − 3.8 (b) Estimator LS LQLC Ave r age computational time [ s] 10 − 4.75 10 − 4.50 10 − 4.25 10 − 4.00 10 − 3.75 (c) Figure 7: Boxplots of the av erage computational time o ver 1000 repeated runs of one fixed positioning instance, comparing LS and LQLC in the (a) light, (b) medium, and (c) deep urban datasets. The whisk ers extend to 1 . 5 × IQR. w as conducted to examine the sensitivit y of LQLC to mismatch b et w een the true logistic scale and the scale used in estimation. A fixed satellite geometry extracted from one real ep o ch in the medium urban dataset was used in this sim ulation, with only the GPS and Beidou observ ations retained to matc h the real-data exp erimen t setting. The geometry matrix w as formed by linearizing the pseudorange mo del at the known receiver reference p osition of that dataset. The pseudorange errors w ere generated from a zero-mean logistic distribution with a fixed true scale, and the assumed scale s assumed in LQLC w as v aried through the mismatc h ratio α = s assumed /s true from 0.1 to 10. (a) (b) Figure 8: Controlled scale-mismatc h sensitivity analysis for LQLC under a fixed GPS-and-Beidou geometry extracted from one medium-urban real-data ep och. P anel (a) shows 3D RMSE and panel (b) shows 3D STD as the assumed logistic scale is v aried through the mismatc h ratio α = s assumed /s true . Figure 8 sho ws a clear asymmetry in the scale-mismatch sensitivit y of LQLC. When the assumed scale is sev erely underestimated, the p ositioning p erformance deteriorates rapidly . The 3D RMSE decreases from 15.41 m at α = 0 . 1 to ab out 13.50–13.51 m near α = 1 . 6–1 . 8, while the 3D STD Zhengdao LI, P enggao Y an, Baoshan Song and Li-T a Hsu page 14 of 18 decreases from 7.05 m to ab out 6.27 m ov er the same range. By con trast, once the assumed scale b ecomes moderately large, the p erformance c hanges only gradually . Ev en when α is increased to 10, the 3D RMSE and 3D STD remain at 13.59 m and 6.29 m, resp ectively . This figure therefore sho ws that LQLC is muc h more sensitive to severe underestimation of the logistic scale than to o v erestimation. This b eha vior can b e explained through the normalized residual ¯ r = r /s and the induced weigh ting function of LQLC. When the assumed scale is to o small, the normalized residual b ecomes excessively large even for measuremen ts with only mo derate ra w residuals. As a result, man y observ ations enter the saturated down weigh ting regime to o early , and useful measurement information is suppressed more aggressiv ely than intended. This is why small scale v alues lead to b oth larger p ositioning errors and substantially more IRLS iterations. When the assumed scale b ecomes larger, ho wev er, the w eighting function v aries more gradually with the residual, so further scale enlargemen t changes the estimator more mildly . The practical issue is therefore not exact scale matc hing, but a voiding sev ere underestimation of the logistic scale. This analysis indicates that the adv antage of LQLC do es not rely on an unrealistically precise estimate of the fitted logistic scale, but it do es dep end on not c ho osing an o v erly small scale that o ver-penalizes the residuals. 5 Conclusion and future w ork This study presen ted a logistic-based form ulation for urban GNSS p ositioning. Motiv ated b y the hea vy-tailed behavior of urban pseudorange errors, the corresponding maxim um lik eliho od estimator, the LQLC estimator, w as derived and shown to be solv able efficiently using IRLS. The resulting framew ork pro vides a principled alternativ e to the conv entional Gaussian-based LS estimator under urban p ositioning conditions. Exp erimen ts in ligh t, medium, and deep urban en vironmen ts sho wed that LQLC consisten tly im- pro v es p ositioning p erformance relativ e to LS. Across the three ev aluated scenarios, the 3D RMSE reduction ranged from appro ximately 11% to 31%, while the 3D STD reduction ranged from approx- imately 27% to 61%. The computation-efficiency analysis show ed that the prop osed metho d remains compatible with real-time p ositioning requirements. The con trolled scale-mismatc h analysis further sho w ed that the sensitivit y of LQLC to scale mismatch is asymmetric: severe underestimation is clearly more harmful than ov erestimation, whereas the estimator remains effective ov er a fairly wide range on the larger-scale side. This result strengthens the practical case for logistic error mo deling in urban GNSS p ositioning, where the fitted scale parameter is estimated from finite data and cannot b e exp ected to b e exact. F uture w ork will fo cus on t wo directions. First, the logistic mo del ma y support the developmen t of reliable and computationally efficient test statistics to complement con v entional Gaussian-based receiv er autonomous in tegrit y monitoring (RAIM). Second, the same mo deling framew ork ma y b e extended to other GNSS state-estimation problems, including differen tial p ositioning and multi- sensor fusion. Zhengdao LI, P enggao Y an, Baoshan Song and Li-T a Hsu page 15 of 18 App endix A MLE Deriv ations with a Logistic Error As- sumption ˆ x = argmax n Y i =1 f L ( ε i ; 0 , s i ) (14) = argmax n Y i =1 1 s i ! n Y i =1 1 exp y ( i ) − H ( i, :) x s i + exp − y ( i ) − H ( i, :) x s i + 2 (15) = argmin n X i =1 ln ( s i ) + n X i =1 ln 2 cosh y ( i ) − H ( i, :) x s i + 2 (16) = argmin n X i =1 ln cosh y ( i ) − H ( i, :) x s i + 1 (17) App endix B MLE Deriv ations with a Gaussian Error As- sumption Based on Gaussian error assumptions, where eac h error source follo ws N (0 , σ i ), the likelihoo d func- tion is given b y the pro duct of individual Gaussian PDFs. The MLE seeks to maximize this lik eliho o d, whic h is equiv alent to minimizing the negativ e log-lik eliho o d: ˆ x = argmin n X i =1 − ln 1 √ 2 π σ i e − 1 2 y ( i ) − H ( i, :) x σ i 2 ! (18) Ignoring constan t terms, this simplifies to the least squares estimator: ˆ x = argmin n X i =1 1 2 y ( i ) − H ( i, :) x σ i 2 = argmin n X i =1 J LS,i . (19) The solution to the LS estimator is in the form of weigh ted least squares (WLS): ˆ x = H ⊤ WH − 1 H ⊤ Wy , (20) where the w eighting matrix W is a diagonal matrix with W ( i,i ) = 1 σ 2 i . App endix C F orm ulation of BGMM and studen t’s t distri- bution BGMM is a w eigh ted mixture of t wo Gaussian comp onents and its probability densit y function (PDF) giv es that f B GM M ( x ; p 1 , µ 1 , σ 1 , µ 2 , σ 2 ) = p 1 f N ( x ; µ 1 , σ 1 ) + (1 − p 1 ) f N ( x ; µ 2 , σ 2 ) . (21) Zhengdao LI, P enggao Y an, Baoshan Song and Li-T a Hsu page 16 of 18 In this expression, p 1 , µ 1 , and σ 1 are the w eigh ting, lo cation, and scale parameters for the first Gaussian comp onen t, while µ 2 and σ 2 are the lo cation and scale parameter for the second comp onent. The PDF of a generalized Student’s t distribution is giv en by f t ( x ; µ, λ, ν ) = 1 λ · Γ ν +1 2 √ ν π Γ ν 2 · 1 + x − µ λ 2 ν ! − ν +1 2 , (22) where µ and λ are the lo cation and scale parameter, while ν denotes the degree of freedom. References Blanc h, J., W alter, T., & Enge, P . (2008). P osition error bound calculation for GNSS using meas- uremen t residuals. IEEE T r ansactions on A er osp ac e and Ele ctr onic Systems , 44 (3), 977–984. h ttps://doi.org/10.1109/T AES.2008.4655357 Crespillo, O. G., Andreetti, A., & Grosch, A. (2020). Design and ev aluation of robust M-estimators for GNSS positioning in urban en vironments. 2020 International T e chnic al Me eting of The Institute of Navigation , 750–762. h ttps://doi.org/10.33012/2020.17211 Dhital, A., Bancroft, J. B., & Lachapelle, G. (2013). A new approach for impro ving reliabilit y of p ersonal navigation devices under harsh GNSS signal conditions. Sensors , 13 (11), 15221– 15241. h ttps://doi.org/10.3390/s131115221 El-Mo w afy, A. (2020). F ault detection and in tegrity monitoring of GNSS p ositioning in in telligent transp ort systems. IET Intel ligent T r ansp ort Systems , 14 (3), 164–171. h ttps : / / doi . org / 10 . 1049/iet- its.2019.0248 Europ ean Space Agency. (2024). Assess the fe asibility of using opp ortunistic sour c es of data to aid DFMC inte grity (tech. rep.). Europ ean Space Agency. https : / / iuk - business - connect . org . uk/wp - con ten t/ uploads/ 2024/ 04/D8 .1 Crowd- sourced sourced inputs in to DFMC integrit y F easibility rep ort V2.p df F u, M., & Gao, G. X. (2026). Robust Android GNSS p ositioning using single-differenced tigh tly coupled GNSS/INS EKF. NA VIGA TION: Journal of the Institute of Navigation , 73 , na vi.748. h ttps://doi.org/10.33012/na vi.748 Gro v es, P . D. (2011). Shado w matching: A new GNSS p ositioning tec hnique for urban cany ons. Journal of Navigation , 64 (3), 417–430. https://doi.org/10.1017/S0373463311000087 Gupta, S., & Gao, G. X. (2024). Reliable urban vehicle lo calization under fault y satellite na vigation signals. EURASIP Journal on A dvanc es in Signal Pr o c essing , 2024 (53). h ttps : / / doi . org / 10 . 1186/s13634- 024- 01150- 2 Hsu, L.-T. (2017). Analysis and mo deling GPS NLOS effect in highly urbanized area. GPS Solutions , 22 (7). https://doi.org/10.1007/s10291- 017- 0667- 9 Hub er, P . J. (1981). R obust statistics . John Wiley & Sons. Hub er, P . J. (1964). Robust estimation of a lo cation parameter. The Annals of Mathematic al Stat- istics , 35 (1). https://doi.org/10.1214/aoms/1177703732 Johnson, N. L., Kotz, S., & Balakrishnan, N. (1995). Continuous univariate distributions, volume 2 (V ol. 2). John Wiley & Sons. Kaplan, E. D., & Hegarty, C. J. (Eds.). (2006). Understanding GPS: Principles and applic ations (Second edition). Artech House. Zhengdao LI, P enggao Y an, Baoshan Song and Li-T a Hsu page 17 of 18 Khanafseh, S., Kujur, B., Jo erger, M., W alter, T., Pullen, S., Blanc h, J., Doherty , K., Norman, L., de Gro ot, L., & Perv an, B. (2018). GNSS m ultipath error modeling for automotive applica- tions. Pr o c e e dings of the 31st International T e chnic al Me eting of the Satel lite Division of The Institute of Navigation (ION GNSS+ 2018) , 1573–1589. h ttps://doi.org/10.33012/2018.16107 Lee, Y., & Park, B. (2022). Nonlinear regression-based GNSS multipath mo delling in deep urban area. Mathematics , 10 (3), 412. h ttps://doi.org/10.3390/math10030412 Li, Z., Y an, P ., W en, W., & Hsu, L.-T. (2025). Paired Cauch y-Gaussian o v erb ound for not symmet- ric unimo dal hea vy-tailed distributions. 2025 IEEE/ION Position, L o c ation and Navigation Symp osium (PLANS) , 214–225. https://doi.org/10.1109/PLANS61210.2025.11028215 Marais, J., Nahimana, D.-F., Viandier, N., & Duflos, E. (2013). GNSS accuracy enhancemen t based on pseudo range error estimation in an urban propagation en vironment. Exp ert Systems with Applic ations , 40 (15), 5956–5964. https://doi.o rg/10.1016/j.eswa.2013.05.026 Maronna, R. A., Martin, R. D., Y ohai, V. J., & Salibi´ an-Barrera, M. (2019). R obust statistics: The ory and metho ds (with R) . John Wiley & Sons. Medina, D., Li, H., Vil` a-V alls, J., & Closas, P . (2019). Robust statistics for GNSS positioning under harsh conditions: A useful to ol? Sensors , 19 (24), 5402. https://doi.org/10.3390/s19245402 P eretic, M., Gilab ert, R., Carroll, J., Gutierrez, J., Mo ore, A., Christie, J., & Dill, E. T. (2025). Statistical analysis of GNSS multipath errors in urban can yons. 2025 IEEE/ION Position, L o c ation and Navigation Symp osium (PLANS) , 1216–1225. h ttps : / / doi . org / 10 . 1109 / PLANS61210.2025.11028411 T ao, Z., Li, Z., W ang, G., Chen, Z., Chen, W., & Zhao, Z. (2025). An impro ved studen t’s t mo del- based v ariational robust filter for GNSS/INS tightly coupled integration. A dvanc es in Sp ac e R ese ar ch , 76 (6), 3220–3238. https://doi.org/10.1016/j.asr.2025.06.073 V ana, S., & Bisnath, S. (2023). Low-cost, triple-frequency , multi-GNSS PPP and MEMS IMU integ- ration for con tin uous navigation in simulated urban en vironmen ts. NA VIGA TION: Journal of the Institute of Navigation , 70 (2), navi.578. https://doi.org/10.33012/na vi.578 W en, W., Bai, X., & Hsu, L.-T. (2023). 3D vision aided GNSS real-time kinematic p ositioning for autonomous systems in urban can y ons. NA VIGA TION: Journal of the Institute of Navigation , 70 (3), navi.590. https://doi.org/10.33012/na vi.590 W en, W., & Hsu, L.-T. (2021). T ow ards robust GNSS p ositioning and real-time kinematic using factor graph optimization. 2021 IEEE International Confer enc e on R ob otics and Automation (ICRA) , 5884–5890. https://doi.org/10.1109/ICRA48506.2021.9562037 W en, W., & Hsu, L.-T. (2022). 3D LiDAR aided GNSS NLOS mitigation in urban can y ons. IEEE T r ansactions on Intel ligent T r ansp ortation Systems , 23 (10), 18224–18236. h ttps : / / doi . org / 10.1109/TITS.2022.3167710 W eng, D., Chen, W., Ding, M., Liu, S., & W ang, J. (2025). Sidewalk matching: A smartphone- based GNSS p ositioning technique for p edestrians in urban cany ons. Satel lite Navigation , 6 (4). https://doi.org/10.1186/s43020- 025- 00159- 8 W eng, D., Hou, Z., Meng, Y., Cai, M., & Chan, Y. (2023). Characterization and mitigation of urban GNSS m ultipath effects on smartphones. Me asur ement , 223 , 113766. h ttps://doi.org/10.1016/ j.measuremen t.2023.113766 Xia, X., W en, W., & Hsu, L.-T. (2024). Integrit y-constrained factor graph optimization for GNSS p ositioning in urban cany ons. NA VIGA TION: Journal of the Institute of Navigation , 71 (3), na vi.660. h ttps://doi.org/10.33012/na vi.660 Y an, P ., Hu, Y., W en, W., & Hsu, L.-T. (2025). Multiple faults isolation for m ulticonstellation GNSS p ositioning through incremental expansion of consisten t measurements. IEEE Sensors Journal , 25 (4), 6967–6981. h ttps://doi.org/10.1109/JSEN.2024.3524434 Zhengdao LI, P enggao Y an, Baoshan Song and Li-T a Hsu page 18 of 18 Y an, P ., Jin, R., Zhang, J., W ang, C.-W., & Hsu, L.-T. (2025). Jac kknife ARAIM: Efficien t GNSS in tegrit y monitoring for simultaneous faults under non-Gaussian errors. https : / / doi . org / 10 . 48550/arXiv.2507.04284 Y an, P ., Zhong, Y., & Hsu, L.-T. (2025). Principal Gaussian ov erb ound for hea vy-tailed error b ound- ing. IEEE T r ansactions on A er osp ac e and Ele ctr onic Systems , 61 (1), 829–852. h ttps : / / doi . org/10.1109/T AES.2024.3448405 Y o der, J. E., & Humphreys, T. E. (2023). Lo w-cost inertial aiding for deep-urban tigh tly coupled m ulti-an tenna precise GNSS. NA VIGA TION: Journal of the Institute of Navigation , 70 (1), na vi.561. h ttps://doi.org/10.33012/na vi.561 Zh u, N., Marais, J., B´ etaille, D., & Berbineau, M. (2018). GNSS p osition integrit y in urban envir- onmen ts: A review of literature. IEEE T r ansactions on Intel ligent T r ansp ortation Systems , 19 (9), 2762–2778. https://doi.org/10.1109/TITS.2017.2766768
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment