차량‑조작기 시스템의 포트‑해밀토니안 구조와 에너지 흐름 분석
** 본 논문은 차량‑조작기(VMS) 시스템을 포트‑해밀토니안 형태로 재구성하여, 에너지 흐름과 보존 구조를 명시적으로 드러낸다. 첫 번째 원리와 해밀토니안 축소 이론을 이용해 표준 형태와 관성‑분리 형태 두 가지 모델을 유도하고, 기존 라그랑지안·볼츠만‑함멜 방정식과의 수학적 동등성을 증명한다. **
저자: Ramy Rashad
**
본 논문은 차량‑조작기 시스템(VMS)을 포트‑해밀토니안(framework)으로 재구성함으로써, 복합 로봇 시스템의 에너지 구조를 명시적으로 드러내고 제어·시뮬레이션에 활용 가능한 두 가지 모델을 제시한다.
1. **연구 배경 및 필요성**
VMS는 베이스(플로팅, 수중, 우주, 혹은 전방향 모바일)와 매니퓰레이터(다관절 시리얼 체인)로 구성된 복합 시스템이다. 기존 연구는 주로 라그랑지안 기반으로 뉴턴‑오일러 재귀식이나 변분 원리를 이용해 동역학을 유도했으며, 이는 관절 좌표와 속도에 의존하고 에너지 보존 구조를 명시적으로 보여주지 못한다. 특히, 포트‑기반 모델링이 도입된 포트‑해밀토니안은 개방형 시스템으로서 외부와의 에너지 교환을 포트(power ports)로 표현할 수 있어, 임피던스·에너지‑쉐이핑 제어 등 에너지 기반 제어 기법과 자연스럽게 연결된다.
2. **수학적 사전 지식**
- **SE(3)와 Lie‑algebra 𝔰𝔢(3)**: 베이스의 위치·방향을 동차 변환 행렬으로 표현하고, 트위스트와 와인드를 각각 𝔰𝔢(3)와 그 공액공간에 매핑한다.
- **관절 서브그룹**: 각 관절은 𝔤ᵢ ⊂ SE(3) 로 모델링되며, 관절 구성 변수 qᵢ와 속도 vᵢ는 Lie‑algebra 원소와 동형사상 𝛥ᵢ를 통해 트위스트와 연결된다.
- **Principal Bundle 구조**: 전체 구성 공간 Q = G_b × Π_i G_i 로서, 베이스와 관절이 각각 기본(base)과 섬유(fiber) 역할을 하는 주다발(principal bundle) 구조를 가진다.
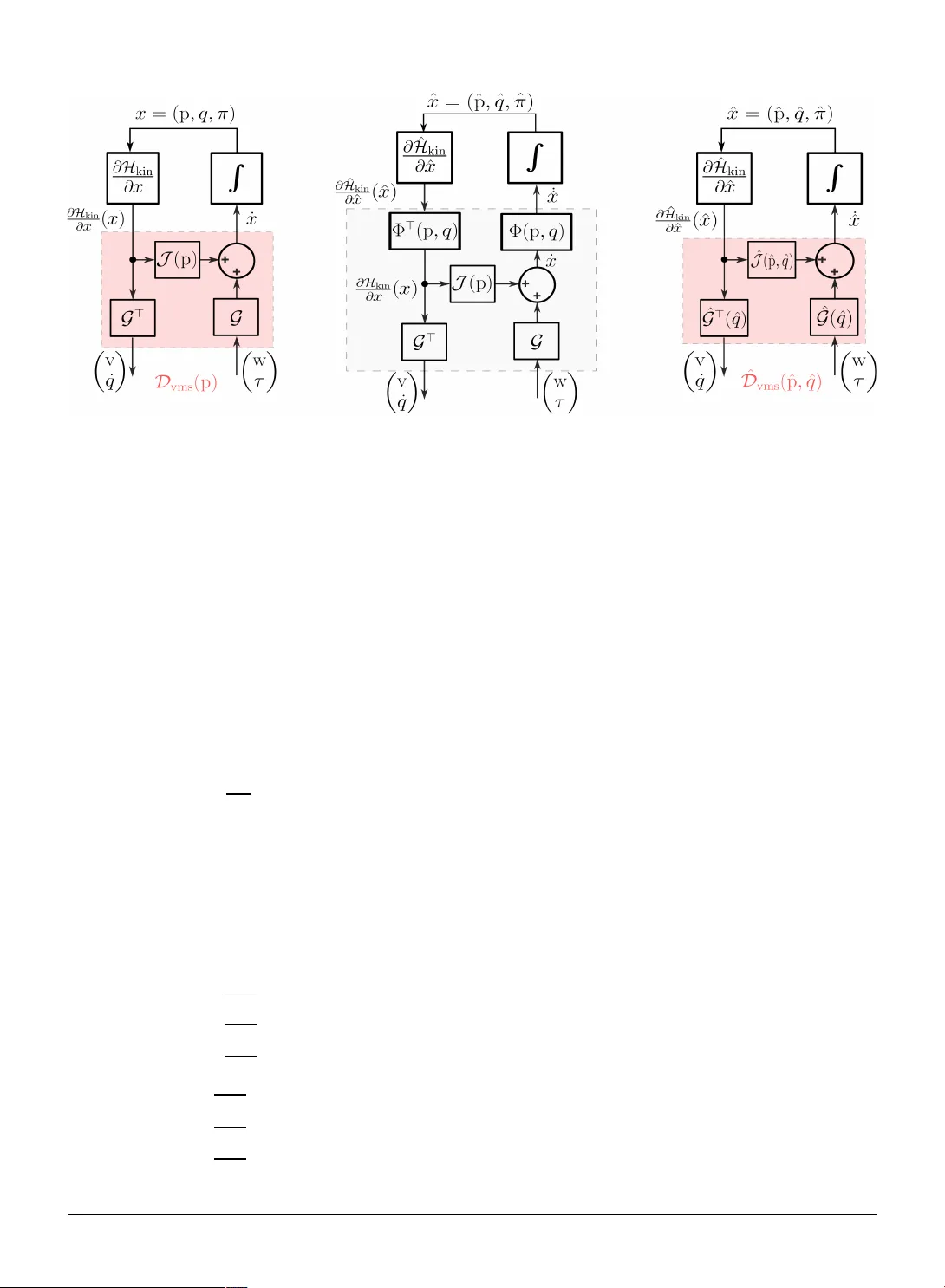
3. **포트‑해밀토니안 모델 유도**
- **Hamiltonian 정의**: 전체 운동에너지를 H = ½ ξᵀ M(q) ξ 로 정의, 여기서 ξ = (v, ẋ_q) 은 베이스 트위스트와 관절 속도의 결합 벡터, M(q)는 q‑의존 질량(관성) 매트릭스이다.
- **축소 과정**: 베이스와 관절의 대칭성을 이용해 해밀토니안 축소를 수행, 결과적으로 베이스와 관절의 관성 매트릭스가 “locked”, “coupling”, “manipulator” 세 부분으로 분리된다.
- **표준 포트‑해밀토니안 형태**: 상태 x = (ξ)와 공액 p = ∂H/∂ξ 로 정의하고,
\
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기