철도 차량 주행위험 감지를 위한 AI와 전통 방식의 비교 연구
본 논문은 철도 차량이 레일 위에 놓인 다양한 물체를 주행할 때 발생하는 “주행위험(Driving‑Over)” 이벤트를 자동으로 감지하기 위한 실험과 3가지 탐지 알고리즘을 제시한다. 42개의 가속도·마이크·레이저 센서를 장착한 화물 차량을 이용해 강·목·석·뼈 등 8종류의 물체를 5·10·15 km/h 속도로 통과시켰으며, 수집된 데이터로 CNN 기반 딥러닝 모델과 두 개의 임계값 기반 방법을 개발하였다. 딥러닝 모델은 99.6 %의 평균 정…
저자: Tobias Herrmann, Nikolay Chenkov, Florian Stark
본 논문은 철도 차량이 레일 위에 놓인 물체를 주행할 때 발생하는 ‘주행위험(Driving‑Over)’ 이벤트를 자동으로 탐지하기 위한 실험적 연구와 알고리즘 개발을 다룬다. 서론에서는 완전 자동화 열차(GoA 4) 구현을 위한 핵심 과제로 충돌·주행위험 감지를 제시하고, 기존의 카메라·레이더·라이다 기반 시스템은 충돌 여부와 손상 정도를 판단하기 어렵다는 한계를 지적한다. 특히, 앞바퀴와 차체가 물체 위를 통과할 때 발생하는 가속·진동·음향 신호를 직접 측정하는 센서 기반 접근이 필요함을 강조한다.
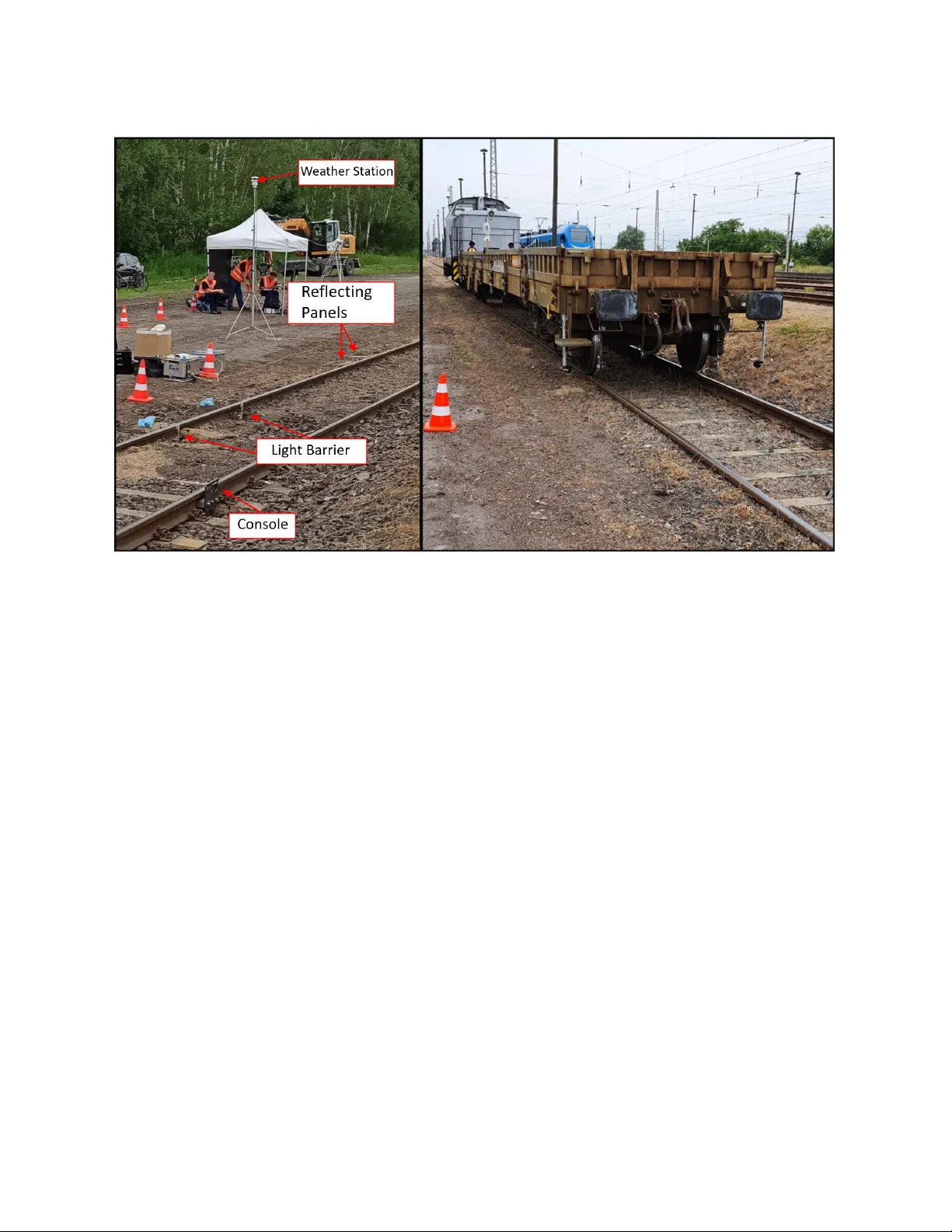
실험 설계에서는 24.5 t 무게의 Type Res 화물 차량을 선택하고, 앞바퀴와 차체에 총 42개의 센서를 장착했다. 사용된 센서는 수직·종방향 가속도계(단축·삼축), 마이크(풍막 포함), 레이저 거리계, 변위선(와이어드로) 등이며, 가속도는 5 kHz, 마이크는 50 kHz로 고주파 데이터를 수집한다. 레이저 거리계는 물체 접근을 사전 감지하고, 가속도와 음향은 실제 주행위험 발생 시의 물리적 반응을 포착한다. 실험 물체는 강철 플랫·웨지, 라임 목재, 자작나무 스틱, 동물 뼈 등 8종류이며, 각각 5 km/h, 10 km/h, 15 km/h 세 속도로 통과시켰다. 각 물체당 두 차례의 반복 실험을 수행해 데이터의 재현성을 확보하였다.
데이터 전처리 단계에서는 100 ms 윈도우를 기준으로 피크‑투‑피크, RMS, 옥타브 스펙트럼 등 5가지 특징을 추출하고, 가속도 신호는 10 Hz로 다운샘플링한다. 이를 바탕으로 세 가지 탐지 방법을 개발하였다. 첫 번째는 Convolutional Neural Network(CNN) 기반 딥러닝 모델이다. 모델은 1‑D 컨볼루션(커널 폭 11) → 2‑D 컨볼루션(7×11×11) → Max‑Pooling → Feed‑Forward 네트워크 구조로 이루어져 있으며, 열차 속도 정보를 별도 입력으로 결합한다. 출력은 5개의 클래스(물체 종류) 중 하나를 선택하는 소프트맥스 레이어이다. 손실 함수는 교차 엔트로피이며, 학습은 전체 데이터의 80 %를 훈련, 20 %를 검증에 사용하였다.
두 번째와 세 번째 방법은 전통적인 임계값 기반 접근이다. ‘classical‑1’은 가속도 피크와 RMS 값이 사전에 정의된 임계값을 초과하면 주행위험으로 판단한다. ‘classical‑vel’은 속도 파형에서 급격한 변화(예: 속도 감소) 를 감지해 이벤트를 식별한다. 두 방법 모두 동일한 전처리 과정을 거치며, 임계값은 실험 데이터의 통계적 특성을 기반으로 설정하였다.
성능 평가 결과, CNN 모델은 평균 정확도 99.6 %를 기록했으며, 특히 강철 웨지와 목재 스틱을 구분하는 데 높은 신뢰성을 보였다. 전통 방식은 각각 85 %와 88.6 %의 정확도를 보였으며, 특히 작은 뼈 조각이나 얇은 목재와 같은 저강도 물체를 구분하는 데 한계가 있었다. 또한, 전통 방식은 레일 스위치나 결함에 의한 신호와 혼동될 위험이 있었으며, 노이즈에 민감한 단점이 드러났다.
논문은 다음과 같은 기여점을 강조한다. 첫째, 철도 분야에서 최초로 비기계식 주행위험 감지 시스템을 구현하고, 다중 센서와 딥러닝 결합이 기존 방법을 크게 능가함을 실증하였다. 둘째, 다양한 물체와 속도 조건을 포괄하는 실험 데이터셋을 공개함으로써 향후 연구에 기반을 제공한다. 셋째, 센서 배치와 데이터 전처리 방법을 상세히 기술해 실무 적용 가능성을 높였다.
한계점으로는 데이터셋 규모가 제한적이며, 실제 운행 환경에서 발생할 수 있는 복합적인 장애물(동물, 낙엽, 눈 등)과 기상 변화에 대한 일반화 검증이 부족하다는 점을 들었다. 또한, 실시간 처리 요구와 센서 고장 시 대체 메커니즘에 대한 논의가 미흡하다.
향후 연구 방향은 (1) 데이터셋을 확대해 다양한 비정형 장애물을 포함하고, (2) 실시간 임베디드 구현을 통해 열차 제어 시스템에 직접 연동, (3) 라이다·레이다와 같은 기존 감지 기술과 융합해 다중 모달 센서 융합 알고리즘을 개발하는 것이다. 이를 통해 완전 자동화 열차의 안전성을 한층 강화하고, 운영 효율성을 높일 수 있을 것으로 기대한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기