Driving-Over Detection in the Railway Environment
To enable fully automated driving of trains, numerous new technological components must be introduced into the railway system. Tasks that are nowadays carried out by the operating stuff, need to be taken over by automatic systems. Therefore, equipmen…
Authors: Tobias Herrmann, Nikolay Chenkov, Florian Stark
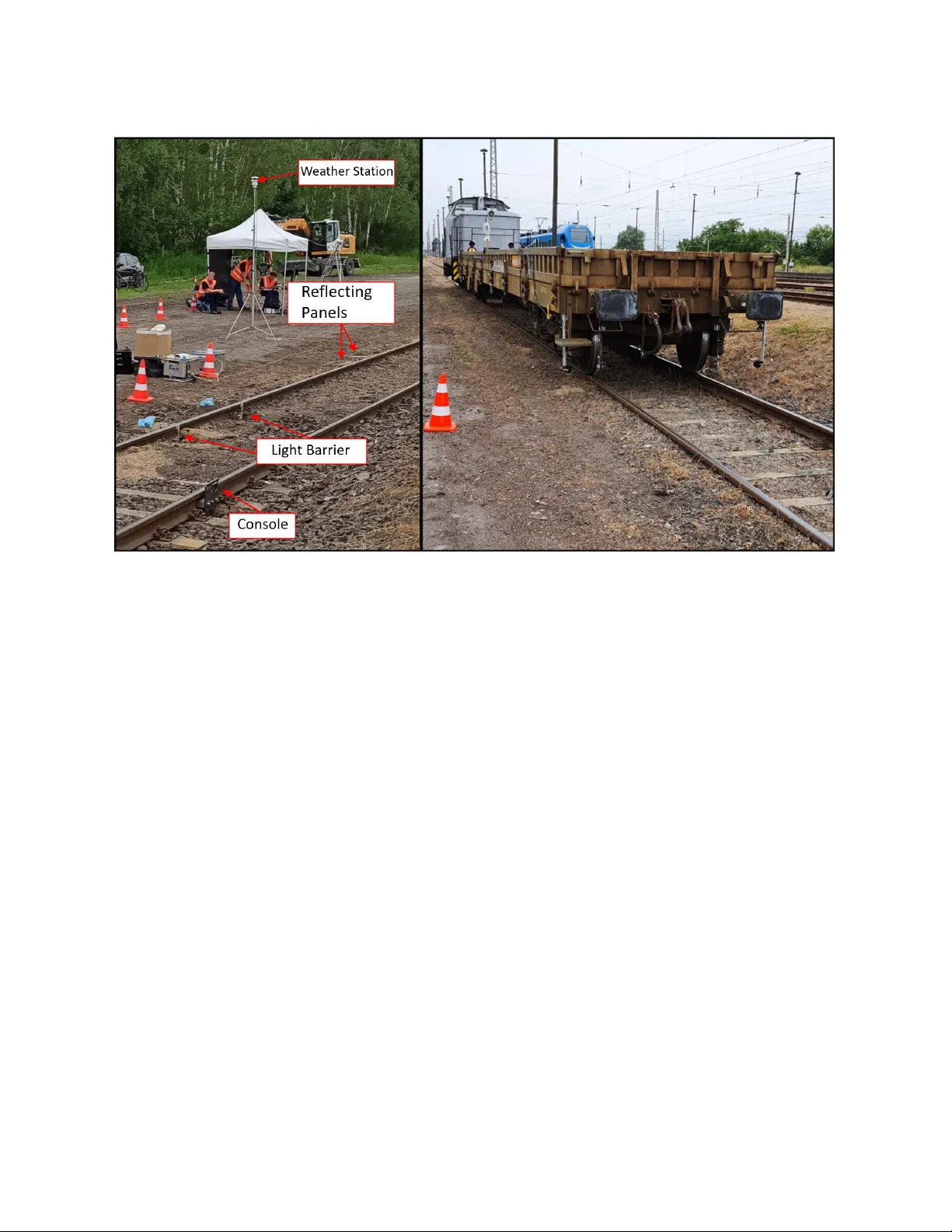
Driving-Ov er Detection in the Railway En vir onment T obias Herrmann, 1 , a) Nikolay Chenk ov, 2 , b) Florian Stark, 2 , c) Matthias Härter, 3 , d) and Martin Köppel 3 , e) 1) Institut für Bahntec hnik (IFB), Berlin, Germany . 2) Industrial Analytics GmbH, Berlin, Germany . 3) DB InfraGO A G, Berlin, Germany . (Dated: 23 February 2026) Abstract. T o enable fully automated driving of trains, numerous new technological components must be introduced into the railway system. T asks that are no wadays carried out by the operating stuf f, need to be taken ov er by automatic systems. Therefore, equipment for automatic train operation and observing the en vironment is needed. Here, an important task is the detection of collisions, including both (1) collisions with the front of the train as well as (2) collisions with the wheel, corresponding to an driving-o ver e vent. T echnologies for detecting the dri ving-ov er ev ents are barely in vestigated now adays. Therefore, detailed driving-o ver e xperiments were performed to gather knowledge for fully automated rail operations, using a variety of objects made from steel, wood, stone and bones. Based on the captured test data, three methods were dev eloped to detect driving-ov er ev ents automatically . The first method is based on con volutional neural networks and the other two methods are classical threshold-based approaches. The neural network based approach provides an mean accuracy of 99.6% while the classical approaches sho w 85% and 88.6%, respectiv ely . INTR ODUCTION Less road traf fic, fe wer traffic jams, less en vironmental pollution - and more people and more goods on the rails. The rail sector in Europe is on the ver ge of a technological leap into the digital future. The "Digital Rail Germany" sector initiati ve is seizing this opportunity and bringing future technologies to the rail system. The foundation for this is being laid with the fundamental modernization and digitization of the infrastructure through the consistent introduction of digital control and safety technology . Sev eral technological challenges are associated with the goal of having trains on mainline railroads run in a highly automated manner in the future. In automatic train operation (A TO) [1], technical systems take over tasks that had previously been performed by the operating staff. A TO includes different Grades of Automation (GoA)(i.e. T ab . I), up to GoA4 in which the train is fully automated with no staff on board. One of the challenges is to detect possible collisions and driving-o ver objects e vents and to derive appropriate responses for the driving operations. The variety of objects in the track area is manifold and ranges from natural objects to metal parts and living beings. Based on the expected e vents in re gular rail operations, initial requirements for an impact and dri ving-over detection system were formulated. In order to be able to detail the requirements, a feasibility study was carried out. Based on the findings of the feasibility study , test runs were planned to (1) record driving-ov er e vents and (2) develop approaches for detecting dri ving-ov er ev ents. The following article outlines the driving-o ver experiments and proposes three methods to detect such ev ents automatically . a) Electronic mail: he@bahntechnik.de. b) Electronic mail: nikolay .chenkov@industrial-analytics.io. c) Electronic mail: florian.stark@industrial-analytics.io. d) Electronic mail: matthias.haerter@deutschebahn.com. e) Corresponding author: martin.koeppel@deutschebahn.com. T ABLE I: Simplified description of GoA from DIN EN 62290-1. GoA T rain operation 0 On-sight with no automation 1 Non-automated according to signals and with safeguarding in case of o verlooked signals 2 Semi-automatic with acceleration and deceleration controlled by a technical system 3 Driv er-less with a train attendant 4 Unattended without crew on board ST A TE-OF-THE-AR T Fully automated rail operations [2] hav e been used so far primarily in closed (metro) systems and are not yet state-of- the-art in mainline rail operations. Closed systems hav e no interfaces to the en vironment (forest adjacent to the tracks, crossing roads, etc.) and therefore other safety requirements. A comprehensive ov erview of v arious projects on digiti- zation and automation in rail operations in Germany is provided by the 2019 EBA research report [3]. It summarizes projects from the areas of digital dri ver assistance systems, digitization, and automation. At the international level, the "W orld Report on Metro Automation" [4] from the International Association of Public Transport (UITP) provides a comprehensi ve global ov erview of automated rail operations (metros). Automatically operated metro systems are in operation in 15 cities [5]. Globally , a total of 64 fully automated metro lines were operating in 42 cities as of March 2018 [6]. The grade of automation (GoA) in this context has been defined by UITP [6], as shown in T ab . I. Inter- nationally , the fully automated train operation of the mining company Rio T into receiv ed much attention [5], [6]. A 2.4 km long freight trains in Australia was fully automated, driving without a train driv er . This system is of particular interest because it is a retrofitted system that operates on the regular network and is not a closed metro system. The lev el of automation here can be giv en as GoA 4. In Germany , the Skytrain (people mo ver) and the U2 and U3 subway lines of the Nuremberg subway system [7], which hav e been in operation for sev eral years, are particularly worth of mention with regard to automated traf fic. Since the topic of fully automated rail v ehicles is becoming more and more important, there are se veral industrial and research projects in which automated operation according to GoA 2 to GoA 4 or the way to it is being tested [7]. All of these systems hav e the common feature that objects and obstacles in the path are detected via v arious camera, radar and/or lidar systems and, on the basis of this object detection, emergenc y braking is or could be initiated to stop the vehicle [8], [9] [10]. A disadvantage of this setup with camera, radar and/or lidar systems is that it is not known whether a collision has actually occurred between the vehicle and the object in the form of an impact on the front structure, an driving-o ver e vent or a combination of both. This requires sensors that can detect the direct collision with positional accurac y and, optionally , possible damage. First collision detection systems ha ve been introduced in [11], [12] and in the subway system Nuremberg. In [11], [12] an acceleration sensor is mounted on the front of the train. This sensor is able to detect collisions on the train front. Due to the limited sensor setup, it is dif ficult to estimate damage to the train. Moreov er , dri ving-ov er e vents can hardly be detected. An human interaction is also required when an event hav e been detected by the system. Then, images are transmitted to a control station, where a person e v aluates the collision. The subway in Nurember g uses a mechanical de vice to detect driving-ov er e vents [13], [14]. A bracket is installed on the train, just abov e the track. In the event of a collision, an object on the track causes this bracket to fold back mechanically , thus signaling a collision. The disadv antage of this system is that it is only possible to determine in binary terms whether an ev ent has occurred or not. In case of an collision or driving-o ver e vents, responsible authorities hav e to be informed and the operational procedure may hav e to be changed significantly (e.g. immediate stop of the v ehicle). Therefore, detection systems for such ev ents are absolutely necessary in a fully automated railroad system with interfaces to the en vironment. Currently , there are no datasets a vailable for the detection of collisions in the rail vehicle sector . Therefore, this project was initialized to test technologies for detecting dri ving-over e vents. The results from the project are presented in the following sections. O VER VIEW In this publication a prototypical system for detecting driving-o ver e vents is described. T o the best knowledge of the authors, the proposed approach is the first non-mechanically operating driving-ov er detection method system for railway v ehicles. In Sec. , the test setup and the test procedure are outlined in and Sec. . For the tests a freight wagon was equipped with 42 sensors using four dif ferent measuring modalities. The wagon drov e with three velocities, i.e. 5 km/h, 10 km/h and 15 km/h, over objects types that can appear in regular operation. Based on the captured signals, three detection approaches have been developed (cf. Sec. ). One is based on Conv olutional Neural Network (CNN) and the others are classical threshold methods. Finally , the results are described in Sec. TEST SETUP In this section the test setup is outlined. First, the general setup is explained and then measurment setup is outlined General T est Setup The variety of objects that can be crossed by rail v ehicles is manifold and ranges from living beings of dif ferent sizes to natural objects (e.g. fallen trees) and man-made objects (e.g. forgotten construction equipment, roof tiles). T o account for this diversity , the possible object classes must be abstracted. Thus, the drive-o ver tests can took place within a controlled experimental frame work. Animal bones of various sizes, roof tiles, birch sticks (approximately 50 mm in diameter), laminated wood (20 mm x 55 mm), and various steel elements (flat steel and steel wedge 6 mm to 30 mm in height) were identified and procured or fabricated as possible abstractions (cf. Fig. 5. Another important factor w as the selection of the test vehicle. Its selection was based on the decision that it should first be inv estigated in principle, whether detection of driving-o ver events is possible. Hence, a type Res freight wagon (unladen mass: 24.5 t), equipped with type Y25 bogies, was selected as the test vehicle and fitted with sensor technology . Reasons for selecting this vehicle for the test operation include its good av ailability , easy transport to the test track, and limited financial damage in the ev ent of a possible accident in the controlled test en vironment. Measurement T est Setup Different sensor types were considered for the detection of the driving-ov er events. During the tests, the use of the following sensor types w as considered: • uniaxial and triaxial capaciti ve accelerometers (with different measurement ranges) on dif ferent components of the wagon, • microphones (including wind screen) each positioned close to and aligned with the direction of the leading wheel set, • laser distance sensors directed from the trolley tow ards the rail. • wire draw , i.e. displacement, sensors at sev eral positions at the wagon. The first tw o types of sensors detect the result of the dri ving-ov er event e vent, while the laser distance sensor should detect the object on the rail a few moments before the dri ving-over . Capaciti ve accelerometers were used to calculate the wheelset lift as a result of passing ov er objects, which allow static accelerations (e.g., gravity) to be detected. As a consequence of the change of the wheel-rail contact to a wheel-object-rail contact, noise emissions are to be e xpected. These can be recorded with the microphones. The laser distance sensors enable measurement of the distance between the carriage and the rail and can thus detect objects located on the rail. For the validation of possible later simulations, draw wire, i.e. displacement, sensors were attached at various positions on the wagon. These were primarily not considered for dri ving-over detection due to their inertia. A GNSS FIGURE 1: Left side view of the leading bogie with applied sensors. sensor and an encoder were used for position and speed measurement. Furthermore, a laser light barrier was attached to the wagon body , which enabled precise local synchronization with reference to the object to be crossed with the aid of reflectiv e train closure panels positioned in the track area (Fig. 3). Fig. 1 and 2 sho w the sensor types and their positions on the leading bogie schematically . The sensors were applied on the right side analogous to the left s ide. Both the microphones and the laser distance sensors were installed in front of the leading bogie using brackets. The acceleration sensors were positioned as follows: • at the wheelset bearing, • on the bogie frame directly above the primary spring step, • centrally on the front and rear (not shown) endcarriages of the bogie frame, • on the wagon body in the center of the front-loading area in the direction of trav el. T wo sensors each with dif ferent measuring ranges or sensiti vities in the v ertical direction and one sensor each in the longitudinal direction were used on the wheelset bearing. The vertical and longitudinal directions are the directions in which the strongest reactions are to be expected as a result of an driving-o ver event. The dif ferent measurement ranges were chosen to determine e vents with dif ferent resulting acceleration amplitudes as accurately as possible. The relev ant frequency range of the acceleration signals was estimated to be 0 Hz to 1 kHz. For this purpose, the sampling frequency was set to 5 kHz and a low-pass filter with a cutoff frequency of 1 kHz was applied. The microphone signals were captured with a sampling frequency of 50 kHz and an anti-aliasing filter with a cutof f frequency of 20 kHz. FIGURE 2: Front view of the leading bogie with applied sensors. In addition to the freight car , the track was also equipped with sensors (see Fig. 3). A weather station recorded the wind speeds, the air temperature, the humidity and the air pressure. The recording was triggered when the first wheel-set passed through the installed light barriers a fe w moments before hitting the object to be passed over . These objects were mounted in a specially designed and built console to prev ent the test objects from rolling aw ay or f alling down (cf. Fig. 5). A total of two light barriers were positioned at a defined distance from each other , from the console and from the reflectiv e train closure panels. This allo wed local and temporal synchronization between the vehicle and the obstacle, and the current velocity could be determined for each passing wheel-set. The temporal synchronization between the measurement system on the track and that on the vehicle was achie ved via the GPS time signal. TEST PROCEDURE The tests were carried out on four consecutiv e days. Beforehand, both the track and the vehicle were prepared. On the first day of the trials, comparative runs at different speeds were carried out in the marshalling yard. By means of these comparativ e runs at different speeds over sev eral switches, measurement data for regular operation could be generated. These measured data is used for comparison against the measured data from the driving-o ver events. In this w ay , it can be checked whether the dri ving-over e vents can be distinguished from signals appearing in regular rail operations caused by switches, rail faults, etc. Before starting the test runs with objects, test runs were performed at different speeds and without passing objects on the prepared track. For each of the tested objects, two test runs were then performed at speeds of 5 km/h, 10 km/h FIGURE 3: T est setup on the track side. and 15 km/h respectively . The test vehicle was first accelerated to the target speed by a pushing shunting locomoti ve and then pushed off. The test vehicle then rolled over the test section with the attached objects. After passing through the test section, the wagon was stopped with braking shoes. The complete process was recorded via the sensors and additionally installed cameras. While Fig. 1, 1 and 1 show an ov ervie w of the general test setup on the infrastructure and the test vehicle, Fig. 5 shows examples of how the objects were positioned on the rail using a console constructed for the tests. DETECTION METHODS Three methods where de veloped, for detecting dri ving-ov er ev ents. One method is based on deep learning and the other two methods are classical threshold approaches. In the following, the methods are outlined in more detail. Deep Learning Appr oach The first method is based on Con v olutional Neural Network (CNN) [15]. The concept of con volution is commonly used in machine learning for data preprocessing, but also in neural networks models, i.e. CNNs. The advantage of CNNs is that temporal or spatial relations between neighbouring points in training data can be captured and learned by a kernel. In modeling, multiple kernels are normally applied in parallel to the same signal input, and each kernel could be fit to represent a statistical feature of the training dataset. The computed signal then shows high values when (a part of) the signal matches the kernel, zero when signal and kernel are uncorrelated, and low negati ve v alue when the kernel and the signal are anti-correlated. The proposed network (dl-1) as outlined in Fig 4 is applied to the signals of each accelerometer . First, the high- frequency vibration data (100kHz) is preprocessed to a lower temporal resolution of 10Hz. The follo wing quantities are computed based on the ra w acceleration signal: (1) V elocity peak to peak, (2) V elocity root mean square, (3) Acceleration peak to peak, (4) Acceleration root mean square and (5) Acceleration octa ve spectrum (10 frequency V el Pk2Pk V el RMS Acc Pk2Pk Acc RMS Acc O c tave . . . . . . . Tr a i n S p e e d . 1D Conv 2D Conv . . . . . . . Maxpool . . . . . FF Network Classes FIGURE 4: Con volutional netw ork as classificator . (a) Birch stick (b) Birch stick (c) Small animal bones (d) Small animal bones (e) Large animal bones (f) Large animal bones (g) Steel wedge (h) Steel wedge FIGURE 5: Subset of the objects used for the driving-o ver e xperiments. Fig. (a), (c), (e), (g) show the objects before the driving-o ver e vent. Fig. (b), (d), (f), (h) show the objects after the dri ving-ov er ev ent. bands between 100Hz and 1200Hz), one value per 100ms. These signals are then used as inputs to the network model. First, each time series is con volv ed with 3 kernels of width 11. The outputs of the first layer are then forwarded to an aggregator two-dimensional conv olutional layer and con volv ed with 7 kernels with size 11x11. In the next step, a maxpool layer ef fecti vely compresses the time-series vector into a single point vector by taking the largest value in the time dimension. As the train speed is relati vely constant, it’ s value bypasses the con volutional layers and is piped as direct input to the last stage: a feedforward netw ork. The feedforward network consist of 2 hidden layers with SELU activ ation functions, except in the last layer , where softmax function is used. The number of outputs is fiv e, equal the number of classes to be classified. The loss function is based on the cross-entropy calculation between the model output and the actual object using on-hot encoding. (a) Birch stick (b) Animal bones FIGURE 6: Acceleration signals in z-direction captured from sensors mounted on the wheel-set bearings at a velocity of 5 km/h. (a) Signal caused by the driving-ov er e vent of a birch stick. (b) Signal caused by the driving-ov er ev ent of small animal bones. Classical Appr oach In this section the classical approaches (classical-1 and classical-vel) are outlined in more detail. The pre-processing steps are similar to the deep learning approach. F or each acceleration sensor , multiple outputs are calculated within a 100ms window , i.e. (1) acceleration peak to peak (2) acceleration root mean square (3) velocity peak to peak (4) velocity root mean square and (5) acceleration octave spectrum. Then a threshold classifier for each of these fi ve quantities is fit to minimize the classification error between events and non-ev ents. T o minimize the number of false positiv es during training, an additional weight is added to the loss function for each non-e vent classified as ev ent. The threshold values are selected during a training phase, using an optimization method, i.e., simulated annealing [16]. If a measured v alue in a time interv al is greater than the predefined threshold, then the ev ent is considered as a driv e-ov er ev ent. This is done for each of the five quantities. Finally , a majority voting over all quantities is carried out. Hence, if most of the quantifier signal an driving-o ver e vent, then a driving-o ver e vent is detected. The second classical (classical-vel) approach also takes the velocity of the train into consideration. Here, the quantities calculated from the input signal are normalized by dividing the measured values by the train velocity . The subsequent process is similar to the first classical approach. EXPERIMENT AL RESUL TS During the test procedure the wagon drov e ov er 60 objects. Fig. 5 show some of the objects before and after the test. In a first step the sensors outcomes were manually ev aluated regarding the signal plausibility . Based on these ev aluations, some sensor modalities have been e xcluded: 1. The microphones sho w in the time domain a similar beha vior as the accelerometers. Nev ertheless, in some cases high v alues in some single frequencies could be seen and the influence of other external impacts (trains on another track, motor sound etc.) were visible and disturbed the measurement or lead to false positi ve. Due to the positiv e results of other sensors, it was decided, to e xclude the microphones. 2. Due to the inertia behavior of the draw wire sensors they show non distincti ve or rele vant pattern. Therefore, these sensors were excluded from the test. 3. The laser sensors at the car body , that were directed to the rail surface were to prone to disturbances. In various cases the sensors show higher amplitudes for no e vent than for driving-o ver e vents. Hence, the ev aluation concentrated on the accelerations sensors. For this purpose, the accelerations of the reference runs were first ev aluated and the e vents were assigned to the known track ev ents (switches, tracks, etc.) to the extent T ABLE II: Detection Results dl-1 classical-1 classical-vel Max Accuracy 100% 92.3% 97.2% Min Accuracy 98.7% 77.5% 77.6% Mean Accuracy 99.6% 85.3% 88.6% required for the ev aluation. These measurement signals are referred to as accelerations in regular rail operations. In this way , a reference data set has been created which contains the maximum accelerations to be expected in regular operation. The aim of the dev eloped algorithms is to differentiate driving-ov er ev ents from ev ents during regular operation. Here, the switches leaded to the highest acceleration values. Therefore, the driving-o ver events were tested against data from regular operation. During the test 96 ev ents were utilized for regular operations. The training was done on a random sample on 40% of the data. W e ha ve used the same train/v alidation/test split 40%/30%/30% for all models. The accuracy of the models was calculated for each acceleration sensor individually . In T ab . II the highest, lowest and mean accuracy’ s from all acceleration sensors are depicted. The lowest accuracy was measured with the sensors mounted on the car body . This is due to the fact that the vehicle body is additionally damped and events appear with lower intensity . On the other hand, the highest accurac y could be reached with the sensors directly mounted at the wheel-set bearings, where no damping appears. Fig 6 shows signals from the acceleration sensors mounted on the wheel-set bearings. The vehicle had a velocity of approximately 5 km/h. Fig 6 (a) shows the results for the birch stick and Fig 6 (a) shows the results from the small animal bones. The objects on the track caused strong acceleration signals in z-direction, that can be clearly differentiated from normal operation scenarios. LIMIT A TIONS During the test week, 60 driving-ov er ev ents where captured, resulting in a limited number of ground truth data. Especially for neural networks this number of e vents is quite small. Hence, the models may show ov erfitting. Furthermore, the driving-o ver test where performed at low velocities. Hence, for higher velocities the signals may behav e dif ferently . Objects that ha ve not been dri ven o ver b ut ha ve been pushed a way continue to represent a challenge for the detection of driv e-over events. Because the latter can also represent, for example, a collision with a li ving being, which is harder to detected due to the non-driving-o ver . CONCLUSIONS Driving-o ver detection in the railway en vironment is an important subsystem for fully automatic dri ving, since this task is currently done by the train dri ver . In a future railway system, this task has to be tak en over by a automatic system, providing a similar or better performance. In this publication the first non-mechanically operating driving- ov er detection system for railway v ehicles was proposed. For ev aluating the approach, detailed experiments have been carried out. Based on the captured sensor data, three algorithms were dev eloped for detecting driving-ov er ev ents. The ev aluation have shown that it is possible to detect driving-o ver e vents up to the maximal velocity tested, i.e. 15 km/h. Furthermore, the driving-o ver ev ents can also be distinguish from regular e vents in rail operations, such as switches and skidding points. It could be determined which sensors modalities and the associated positions are suitable for the subsequent detec- tion routine. Hereby , the acceleration sensors show the best results, while microphones, draw wire sensors and laser distance sensors where withdrawn. For future work sev eral open tasks have been identified. In order to be able to establish a general validity of the results, further tests should take place especially in the higher velocity range. The tests were done, with one type of test vehicle. Hence, further test vehicles should be included in tests, considering also operational maneuv ers as shunting or pushing operations. A CKNO WLEDGMENTS W e would like to thank Hav elländische Eisenbahn (HVLE) for providing the test track. Furthermore, we would like to thank Ben Noethlichs, Max Schischkoff, Thilo Hanisch, and Daniela Lauer for the support during the tests and the project. This work was supported by the Federal Ministry for Economic Af fairs and Climat Action. REFERENCES 1. O. Gebauer , W . Pree, and B. Stadlmann, “Autonomously driving trains on open tracks—concepts, system architecture and implementation aspects, ” Information T echnology (2012). 2. P . Singh, M. A. Dulebenets, J. Pasha, G. Ernesto D.R. S., Y .-Y . Lau, and R. Kampmann, “Deployment of autonomous trains in rail transporta- tion: Current trends and existing challenges, ” IEEEAccess (2021). 3. F . Stoll, N. Nießen, J. Nelles, C. Brandl, A. Mertens, and V . Nitsch, “Auswirkungen der digitalisierung auf den eisenbahnbetrieb - ableitung möglicher veränderungen für den triebfahrzeugführer , ” T ech. Rep. (Eisenbahn-Bundesamt, 2019). 4. UITP, “W orld report on metro automation, ” (2018). 5. Allianz pro Schiene, “Selbstfahrende Metros in Europa: Eine Milliarde Fahrgäste jedes Jahr, ” (2019). 6. UITP - Union Internationale des T ransports Publics, “The benefits of full metro automation, ” (2020). 7. D. Spiegel, A. Fiak, and C. Hauswald, “Digitale schiene deutschland testet erstmals sensorbasierte wahrnehmungssysteme im bahnbetrieb, ” Deine Bahn (2022). 8. E. H. Assaf, C. v on Einem, C. Cadena, R. Sie gwart, and F . Tschopp, “High-Precision Lo w-Cost Gimballing Platform for Long-Range Railw ay Obstacle Detection, ” Sensors 22 , 474 (2022). 9. W . Zhangyu, Y . Guizhen, W . Xinkai, L. Haoran, and L. Da, “A camera and LiD AR data fusion method for railway object detection, ” Sensors 21 , 13442–13454 (2021). 10. A. D. Petrovi ´ c, M. Bani ´ c, M. Simonovi ´ c, D. Stamenkovi ´ c, A. Miltenovi ´ c, G. Adamovi ´ c, and D. Rangelov , “Integration of Computer V ision and Con volutional Neural Netw orks in the System for Detection of Rail T rack and Signals on the Railw ay, ” Applied Sciences 12 , 6045 (2022). 11. D. C. et al., “Impact detection system, ” (2021), u.S. Patent: US 11,052,852 B2. 12. M. Carter , “Rio tinto gains accreditation for autonomous train operations, ” (2018). 13. A. K oller , “Device for detecting obstacles for rail vehicles, ” (2015), patent: WO2015135752A1. 14. Online, “Nuremberg automatic u-bahn, ” https://www.railway- technology.com/projects/neuremburgautobahn/ , ac- cessed: 2023-09-15. 15. S. Kiranyaz, O. A vci, O. Abdeljaber, T . Ince, M. Gabbouj, and D. J. Inman, “1d conv olutional neural networks and applications: A survey , ” Mechanical Systems and Signal Processing 151 , 107398 (2021). 16. S. Kirkpatrick, C. D. Gelatt Jr , and M. P . V ecchi, “Optimization by simulated annealing, ” Science 220 , 671–680 (1983).
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment