데이터 동화 기반 모델 오류 순간 추정
본 논문은 동적 모델의 시간 단계별 오류(모델 오류)의 평균과 공분산을, 관측과 사전 정보를 결합한 데이터 동화(analysis) 결과를 이용해 추정하는 방법을 제시한다. 모델 전이 함수가 Lipschitz 연속이라는 가정 하에, 분석 상태와 실제 상태 사이의 오차가 작을수록 추정된 오류 평균(μ)과 공분산(Q)의 오차가 ε 이하가 되는 명시적 경계식을 도출한다. 이를 통해 오류 추정 정확도를 보장하기 위해 필요한 분석 정확도와 관측 설계 기준…
저자: P.A. Browne
본 논문은 동적 시스템을 수치 모델 f 으로 기술하고, 실제 시스템(진실) xₖᵗ 와 모델이 예측한 상태 사이에 존재하는 모델 오류 βₖ 를 확률 과정으로 가정한다. 목표는 관측 yₖ 과 사전 정보(배경 xᵇ, B) 를 결합한 데이터 동화(analysis) xₖᵃ 를 이용해 βₖ의 평균 μ와 공분산 Q를 추정하는 것이다.
1. **문제 설정 및 기존 방법 비판**
- 전통적인 강제 제약 4D‑Var(SC‑4DVar)에서는 분석이 모델 궤적을 완전히 강제하기 때문에 βₖ가 0이 되어 모델 오류를 전혀 추정하지 못한다.
- 약제약 4D‑Var(WC‑4DVar)에서는 βₖ를 최적화 변수로 포함하지만, Q에 대한 사전 정보가 없으면 실용적으로 적용하기 어렵다.
- 입자 필터에서도 Q는 제안 분포와 가중치 계산에 필수적이며, Q가 부정확하면 대규모 시스템에 적용이 제한된다.
2. **수학적 기초**
- 모델 f 이 Lipschitz 연속(L)이라는 가정 하에, 분석 상태와 진실 상태 사이의 차이가 ε/(L+1) 이하이면 βₖ와 eβₖ(분석 기반 추정)의 차이가 ε 이하임을 정리 2 로 증명한다.
- 평균 μ와 추정 평균 eμ 의 차이는 동일한 ε 한계 내에 있음을 코롤러리 3 로 도출한다.
3. **공분산 추정 경계**
- 공분산은 2차 모멘트이므로 βₖ와 μ의 곱, 차곱 등을 포함한다. 레마 4와 5를 이용해 각 성분 i, j 에 대해 |Q_{ij}‑eQ_{ij}| < ε 가 되도록 필요한 분석 오차를 구체적으로 제시한다.
- 핵심 결과는 정리 6 으로, 평균 추정에 비해 공분산 추정은 약 8배 더 정밀한 분석이 필요함을 보여준다. 이는 평균값이 클수록 더 큰 분석 정확도가 요구된다는 직관적인 해석을 제공한다.
4. **수치 실험**
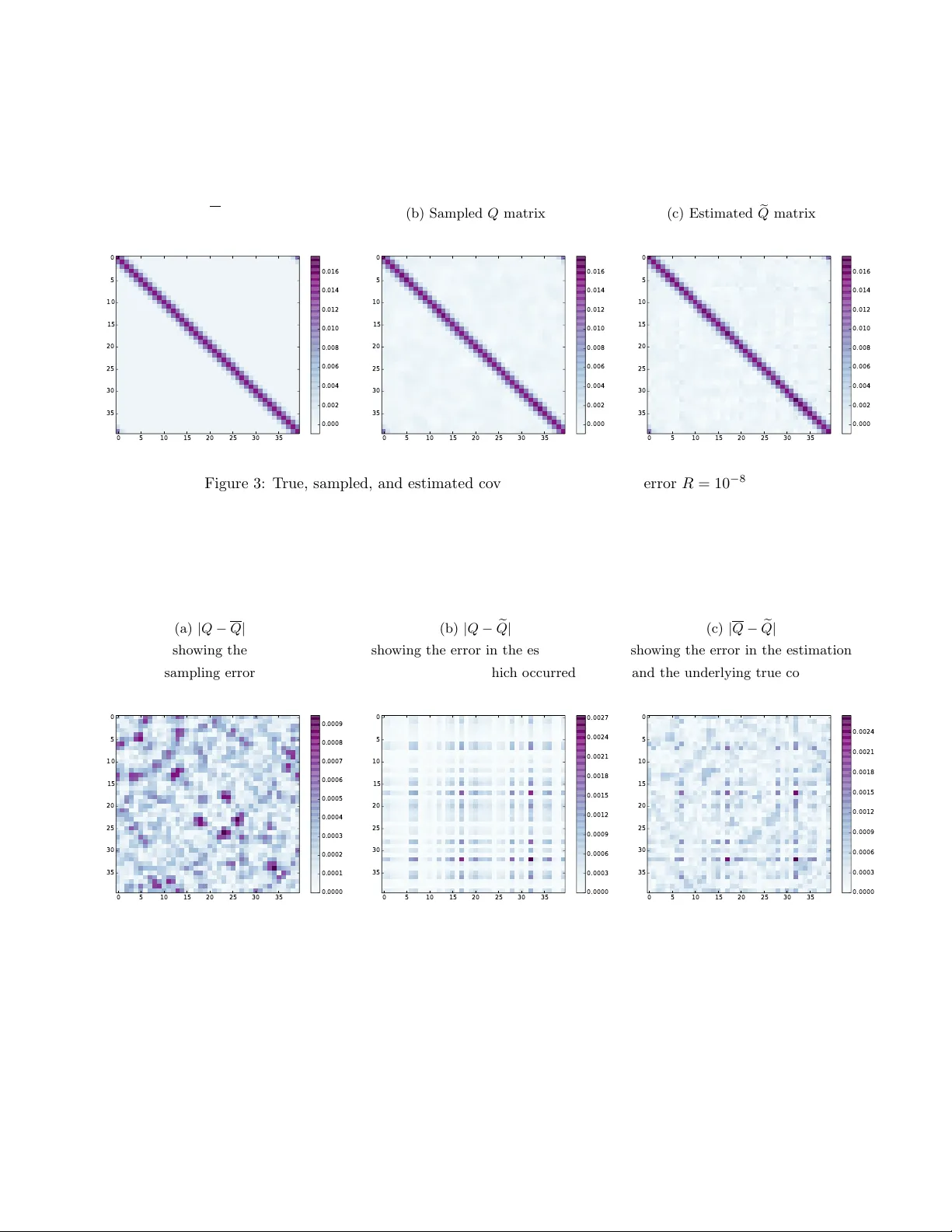
- Lorenz‑96 모델(N=40)에서 인위적으로 정의한 μ와 Q를 사용한다. βₖ는 N(μ, Q) 로 생성하고, 관측은 H=I 로 매 시간마다 수행한다.
- 두 실험: (a) 고정밀 관측(R=10⁻⁸I) → 분석 오차가 매우 작아 μ와 Q가 ε 수준으로 정확히 복원됨. (b) 저정밀 관측(R=10⁻³I) → 분석 오차가 커져 공분산 추정 오차가 크게 증가한다.
- 3D‑Var(단순 3‑Var) 분석을 사용했으며, 실험 결과는 정리와 코롤러리에서 제시한 오차 경계가 실제 수치 실험에서도 잘 맞는다는 것을 확인한다.
5. **의의 및 활용**
- 본 연구는 “분석 정확도가 어느 정도면 모델 오류 평균·공분산을 원하는 정확도로 추정할 수 있는가”라는 질문에 명시적 해답을 제공한다.
- 실험 설계 단계에서 관측 네트워크(관측 빈도·정밀도)와 데이터 동화 알고리즘(배경·관측 오류 공분산) 선택에 대한 정량적 가이드라인을 제시한다.
- 특히, 약제약 4D‑Var와 입자 필터와 같은 고급 데이터 동화 기법에서 Q를 사전 추정하거나 순차적으로 업데이트하는 절차에 직접 적용 가능하다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기