비정방형 시스템을 위한 L1 적응형 출력 피드백 제어, 임의 상대 차수 대응
본 논문은 입력·출력 차원이 서로 다른(M > p) 다중입출력 시스템에 대해, 임의의 상대 차수를 갖는 경우에도 적용 가능한 L1 적응형 출력 피드백 제어기를 설계한다. 오른쪽 인터랙터 행렬과 투영 행렬을 이용해 상태‑출력 예측기를 구성하고, 저역통과 필터와 적응 법칙을 결합해 원하는 출력 궤적을 추적한다. 제어기는 폐루프 안정성을 보장하고, 초기 상태 오차가 존재해도 수렴 속도가 감소 함수 형태로 정량화된다.
저자: Hanmin Lee, Venanzio Cichella, Naira Hovakimyan
본 논문은 비정방형(M > p) 다중입출력 시스템에 대해 임의의 상대 차수를 갖는 경우에도 적용 가능한 L1 적응형 출력 피드백 제어기를 제안한다. 서론에서는 기존 적응 제어가 주로 상태 피드백에 의존하거나, 정방형 시스템에만 적용 가능한 한계를 지적하고, 특히 언더액추에이션(입력보다 출력이 많은) 시스템에서 스퀘어‑다운/스퀘어‑업 방법이 불필요한 측정 손실이나 비최소상태(비최소위상) 문제를 야기함을 강조한다.
문제 정의에서는 시스템 모델을 ˙x = A_m x + B_m(ω u + f(x,t)), y = C_m x 로 설정하고, ω는 미지의 양의 상수, f(x,t)는 매치된 불확실성으로 가정한다. 주요 가정은 (1) 전송 영점이 불안정하지 않음, (2) ω가 알려진 구간 C_ω에 포함, (3) f는 국소 리프시츠 연속이며, 작은 영역에서는 선형 성장 및 유계 시간 미분을 만족한다는 것이다.
수학적 사전 지식으로는 전송 행렬 M₀(s)의 오른쪽 인터랙터 Z⁻¹₀(s) 정의와 존재 정리를 제시한다. Theorem 1에 따라 M₀(s) 가 정상 열랭크를 갖고 (A,B), (A,C) 가 각각 제어가능·관측가능하면, Z⁻¹₀(s) 를 통해 새로운 최소 실현 (A_z,B_z,C_z,D_z) 를 얻을 수 있다. Corollary 1·2는 이 인터랙터를 이용해 원 시스템을 가상 시스템(7) 형태로 분해하고, 원 상태와 가상 상태 사이의 선형 관계 x = x_v + T_z x_z 를 도출한다. 이는 이후 제어 설계에서 상태 추정과 제어 입력을 분리하는 핵심이다.
제어기 설계 섹션에서는 다음과 같은 구조를 만든다. 첫째, 오른쪽 인터랙터 Z⁻¹(s) 를 이용해 입력 u 를 두 부분 u_z와 u_f 로 분리하고, 각각 (10)·(11) 식에 따라 내부 상태 x_u, x_f 를 생성한다. 둘째, 가상 시스템 (12) 에서는 보정된 입력 ω u_z와 추정된 불확실성 η_t = \bar f(X,t) 를 포함한다. Lemma 3을 통해 η_t 를 θ(t)·‖x_g‖ + σ(t) 형태로 파라미터화하고, θ,σ 의 유계는 인터랙터와 시스템 파라미터에 의해 계산 가능하도록 제시한다.
L1 적응 제어 핵심은 저역통과 필터 C(s)와 D(s) 로 구성된 전송 C(s) = ω C₀(s) 를 정의하고, C₀(s) = D(s)(I+ω D(s))⁻¹ 로 설계한다. 이때 D(s)는 C(s)·Z⁻¹(s) 가 엄격히 정상(Strictly Proper)하도록 선택한다. 필터 대역폭을 충분히 크게 잡으면 고주파 적응 신호가 억제되어 로버스트성을 확보한다.
안정성 분석에서는 Lyapunov 함수 V = eᵀP_v e + \tildeθᵀΓ⁻¹\tildeθ + \tildeσᵀΓ_σ⁻¹\tildeσ 를 정의하고, 적응 법칙 \dot{\hatθ}=−Γ proj(·)·... 형태를 사용한다. Lemma 1을 통해 존재하는 K_v 로 A_v = A_H + K_v C_m 을 안정화시키고, P_v, P_y 로 Lyapunov 방정식 (20) 을 만족시킨다. 결과적으로 \dot V ≤ −α‖e‖² + β‖Δ‖² 형태의 부등식을 얻어, 초기 오차가 존재해도 e(t) 가 감소 함수 ρ(t) 로 상한이 제한됨을 증명한다. 또한, 필터 대역폭을 무한히 크게 하면 steady‑state 오차 ‖y−y_m‖ → 0 로 만들 수 있다.
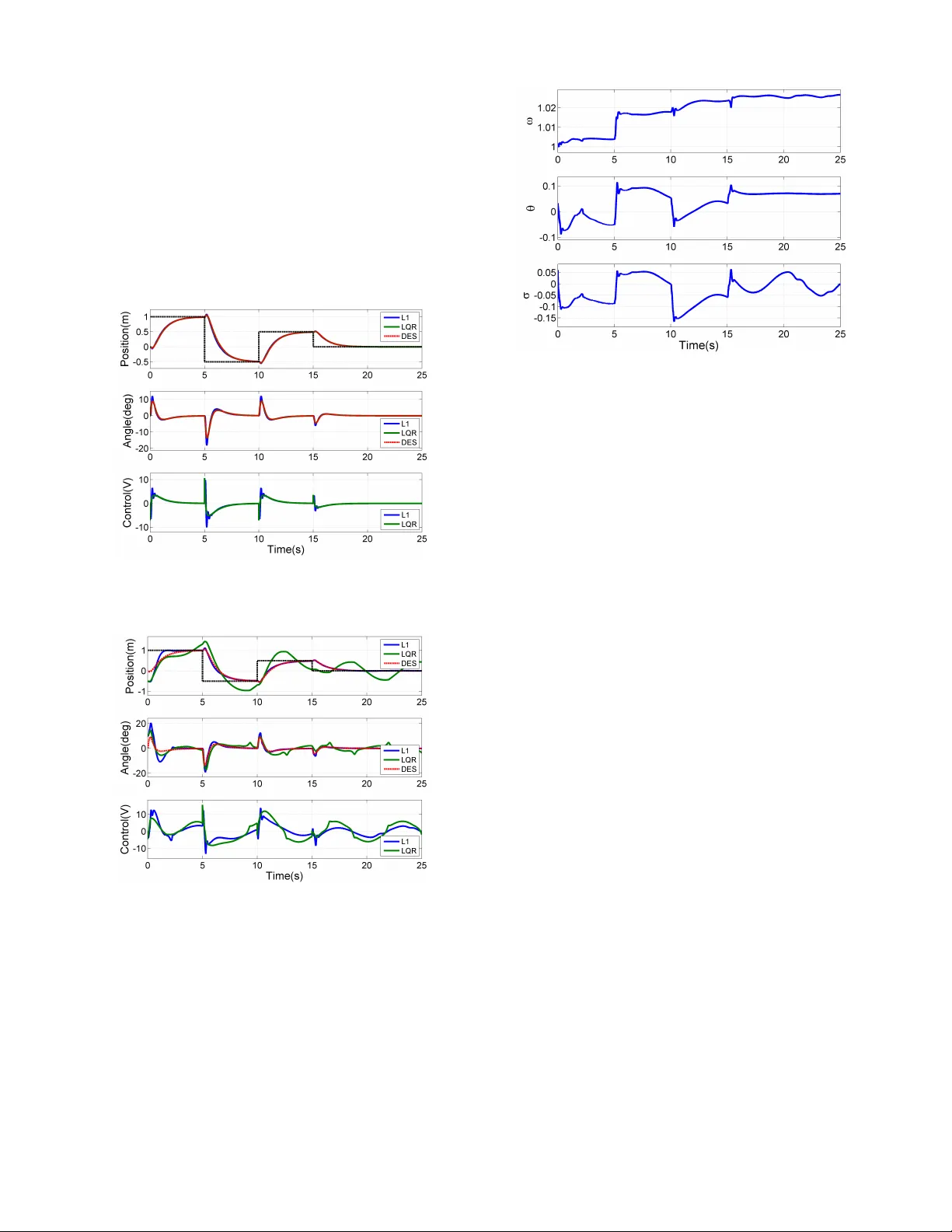
시뮬레이션에서는 (i) 상대 차수가
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기