L1 Adaptive Output Feedback for Non-square Systems with Arbitrary Relative Degree
This paper considers the problem of output feedback control for non-square multi-input multi-output systems with arbitrary relative degree. The proposed controller, based on the L1 adaptive control architecture, is designed using the right interactor…
Authors: Hanmin Lee, Venanzio Cichella, Naira Hovakimyan
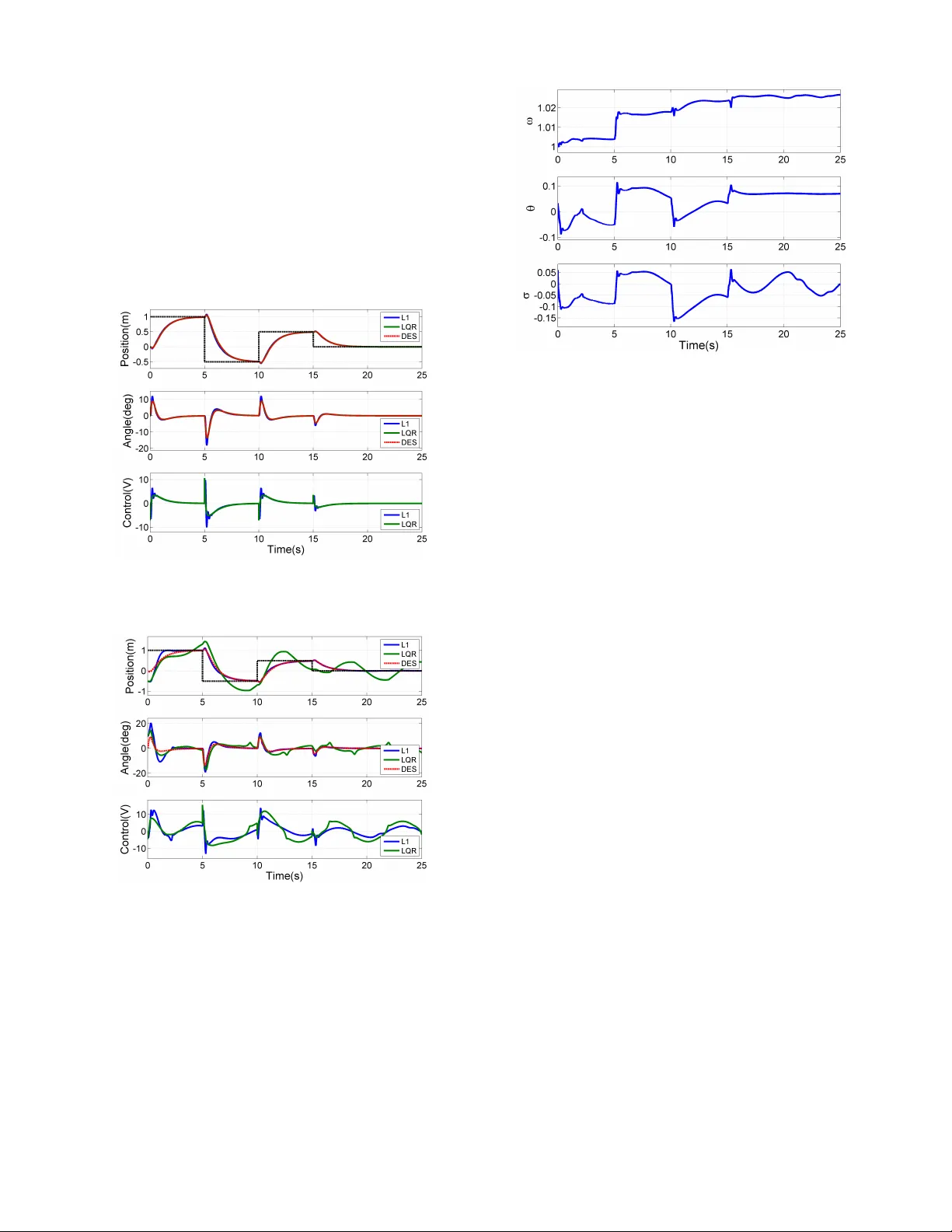
1 L 1 Adapti v e Output Feedback for Non-square Systems with Arbitrary Relati ve Degree Hanmin Lee, V enanzio Cichella, Naira Hov akimyan Abstract —This paper considers the problem of output- feedback control for non-square multi-input multi-output systems with arbitrary relati ve degr ee. The proposed contr oller , based on the L 1 adaptive contr ol architectur e, is designed using the right interactor matrix and a suitably defined projection matrix. A state-output pr edictor , a low-pass filter , and adaptive laws are introduced that achieve output tracking of a desired reference signal. It is sho wn that the proposed control strategy guarantees closed-loop stability with arbitrarily small steady-state errors. The transient performance in the presence of non-zero initial- ization errors is quantified in terms of decreasing functions. Rigorous mathematical analysis and illustrative examples are pro vided to validate the theor etical claims. Index T erms —Adaptive systems, nonlinear systems, adaptiv e control, non-square systems. I . I N T RO D U C T I O N Adaptiv e control has been an active research topic in the past few decades, and it has been recognized as an effecti ve approach to deal with systems that hav e uncertainties and disturbances [1]–[5]. Most of the success stories known to date hav e used state feedback approaches [6]–[11]. Howe ver , such approaches require that the state of the system is measurable, which is not always possible in practice. For this reason, there has been a significant ef fort to dev elop output feedback extensions. The literature concerned with adaptive output feedback con- trol is mainly focused on SISO systems or MIMO systems with strict structural requirements. References [12], [13] extend the results for SISO SPR systems to square MIMO systems. A modified interactor is introduced in order to relax the SPR assumption, thus increasing the applicability of the result to square MIMO systems with high relative degree. Similarly , [14] borrows concepts and tools from [15], [16] to address square MIMO systems with arbitrary relati ve degree. One salient dra wback in [14] is the complicated structure of the controller , which makes it dif ficult to implement, especially as the relativ e degree increases. Nev ertheless, the scope of these approaches is limited to square systems. When dealing with non-squar e MIMO systems, one com- mon approach is to employ solutions for square systems in This work was supported by AFOSR and NASA. Hanmin Lee is a senior researcher at the Agency of Defense Dev elopment (ADD), Daejeon, Republic of Korea, (e-mail: orangeus170@gmail.com). V enanzio Cichella is a professor at the Department of Mechanical En- gineering, Uni versity of Iow a, Iowa City , IA 52242 (e-mail: venanzio- cichella@uiow a.edu). Naira Hov akimyan is a professor at the Department of Mechanical Science and Engineering, University of Illinois at Urbana-Champaign, Urbana, IL 61801 (e-mail: nhovakim@illinois.edu). combination with squaring (-do wn or -up) methods. Squaring- down methods can be applied to overactuated systems [17] by reducing the excessiv e number of inputs. Ho we ver , when dealing with underactuated systems, these methods discard some av ailable measurements, thus limiting the use of out- put information. The disadvantage of squaring-down methods becomes even more evident when the system under consider- ation becomes non-minimum phase after squaring-down (e.g. missiles, inv erted pendulums, etc.). Recent work on adaptiv e output feedback control of under- actuated systems can be found in [18]–[21]. In particular , in [18], [19] solutions for square systems and their extensions to non-square systems are presented. These solutions are based on the use of the square-up method introduced in [22]. These papers focus on systems in which the product between the input and output matrices is full rank. This assumption intrinsically implies that the system must hav e vector relativ e degree equal to [1 , . . . , 1] , thus limiting the applicability of the approach. In [21], the authors augment the control law introduced in [18], [19] with a first order filter , thus extending the results to underactuated systems with arbitrary relati ve degree. Howe ver , this approach assumes that the reference dynamics have vector relative degree [1 , . . . , 1] . Moreover , the solution considers ideal parameterization of uncertainties by an unknown constant matrix and known regressor functions. Thus, the work in [21] does not lend itself to more general classes of non-square systems with time-varying uncertainties and unknown regressor functions, commonly found in many real-world systems. Finally , in [20] the authors tackle non- square MIMO systems by designing an adaptiv e controller with multi-rate inputs . Nevertheless, the approach requires the lifted system to be ASPR, and thus may not be applicable to systems with arbitrary relativ e degree. In this paper , we propose an output feedback adaptiv e controller that deals with a general class of underactuated systems with arbitrary relativ e degree and with matched uncertainties. The main contrib utions of this paper are: (1) the controller handles underactuated MIMO systems with arbitrary relativ e degree and with time-varying uncertainties; (2) uncertainties are not necessarily parameterized by known regressor functions, which broadens the applicability of the solution when compared to e xisting results; (3) the approach is based on the right interactor matrix and a suitably defined state decomposition, providing semi-global stabilization for uncer- tain systems; (4) the solution exhibits guaranteed performance during the transient and steady state under mild assumptions on the uncertainties and unknown initialization error . The approach is based on L 1 adaptiv e control theory , 2 which introduces a filtering structure providing a trade-off between robustness and performance. W ith this architecture, the filtering structure decouples the estimation loop from the control loop, thus allowing high-adaptation gains. While L 1 adaptiv e state-feedback controllers (e.g. [23], [24]) hav e been successfully employed in real applications [11], [25]–[30], the literature directly concerned with output-feedback problems is less extensi ve. L 1 output-feedback solutions for Single-Input Single-Output (SISO) systems can be found in [31]–[33], and can be easily extended to square MIMO systems [34]. An adaptiv e control solution for underactuated MIMO sys- tems is presented in [35], where a suitably defined state de- composition is introduced, which enables standard L 1 adaptiv e output feedback controllers to tackle underactuated systems. Nev ertheless, the approach is limited to systems with relativ e degree one. The present article builds on and extends the work reported in [35] to a more general class of systems with arbitrary relati ve degree by introducing modified L 1 adaptiv e control laws based on the right interactor matrix. This paper is org anized as follo ws: in Section II we in- troduce mathematical results used in the paper; in Section III a formal definition of the problem at hand is gi ven; in Section IV the main result of the paper is presented; Section V deri ves transient and steady-state performance of the system; in Section VI illustrative examples are provided to validate the theoretical findings; finally , the paper ends with concluding remarks in Section VII. I I . M A T H E M AT I C A L P R E L I M I NA R I E S In this section we introduce few theoretical results that will be used in the paper . Throughout the paper we use k · k to denote the vector or matrix ∞ -norm. Giv en a signal x ( t ) , k x k L ∞ and k x k L ∞ [ a,b ] denote the L ∞ norms ov er [0 , ∞ ) and [ a, b ] , respectively . Finally , k x τ k L ∞ denotes the truncated norm k x k L ∞ [0 ,τ ] . Definition 1. Let M 0 ( s ) be a p × m transfer matrix with m ≤ p , and S M 0 ( s ) be the Smith-McMillan form of M 0 ( s ) . Suppose the normal rank of M 0 ( s ) is m . Let the polynomial p i ( s ) be the i -th diagonal element of S M 0 ( s ) , i ∈ [1 , · · · , m ] . Then, the vector r elative degr ee of M 0 ( s ) is defined as [ r 1 , · · · , r m ] ∈ R m , where r i is the relative de gree of p i ( s ) . Definition 2. Let M 0 ( s ) be be a p × m transfer matrix with m ≤ p . Suppose M 0 ( s ) has the full normal column rank m . Then, Z − 1 0 ( s ) is called a right interactor of M 0 ( s ) if lim s →∞ ( M 0 ( s ) Z − 1 0 ( s )) is full rank. The following theorem is deriv ed from [36]. Theorem 1. Let M 0 ( s ) = C ( s I n − A ) − 1 B + D , where A ∈ R n × n , B ∈ R n × m , C ∈ R p × n , and D ∈ R p × m . Assume that ( A, C ) and ( A, B ) are observable and contr ollable pairs, r espectively . Suppose M 0 ( s ) has full normal column rank m with p ≥ m . Then, there exists a right interactor Z − 1 0 ( s ) such that Z 0 ( s ) = C z ( s I n z − A z ) − 1 B z + D z , with − s I n z + A z B z C z D z 6 = 0 , ∀ s ∈ C , (1) wher e A z ∈ R n z × n z is Hurwitz, B z ∈ R n z × m , C z ∈ R m × n z , and D z ∈ R m × m . Mor eover , ther e exist T z ∈ R n × n z , ¯ B ∈ R n × m , and ¯ D ∈ R p × m such that − s I n + A B C D T z 0 0 I m = T z ¯ B 0 ¯ D − s I n z + A z B z C z D z , ∀ s ∈ C , (2) wher e T z , ¯ D ar e full (column) rank, and ( A, ¯ B ) is a contr ol- lable pair satisfying ¯ M 0 ( s ) = C ( s I n − A ) − 1 ¯ B + ¯ D = M 0 ( s ) Z − 1 0 ( s ) . (3) Pr oof. See [36]. Remark 1. The right interactor Z − 1 0 ( s ) is not unique. In fact, the zer os of Z − 1 0 ( s ) ar e the eigen values of A z , which can be arbitrarily chosen. As long as the intersection of eig ( A z ) and eig ( A ) is an empty set, the contr ollability of ( A, ¯ B ) is guaranteed. The r eader is referr ed to [36], [37] for additional details on how to compute the interactor and the associated matrices ( T z , ¯ B , and ¯ D ). Now , let M ( s ) be the stable transfer matrix such as: M ( s ) = C m ( s I n − A m ) − 1 B m , (4) where A m ∈ R n × n , B m ∈ R n × m , and C m ∈ R p × n are a minimal realization of M ( s ) with m ≤ p ≤ n . Corollary 1. Consider the transfer matrix given in (4) . Sup- pose ( C m B m ) is rank deficient. Then, ther e exist a stable transfer matrix Z ( s ) , and matrices, ¯ B ∈ R n × m , T z ∈ R n × n z such that Z ( s ) = C z ( s I n z − A z ) − 1 B z + D z , ¯ M ( s ) = C m ( s I n − A m ) − 1 ¯ B = M ( s ) Z − 1 ( s ) , (5) and A m T z = T z A z + ¯ B C z , C m A m T z = C m ¯ B C z , B m = T z B z + ¯ B D z , C m B m = C m ¯ B D z , (6) wher e A z ∈ R n z × n z , B z ∈ R n z × m , C z ∈ R n z × m , and D z ∈ R n z × m satisfy (1) and T z is of full column rank. Mor eover , the following hold: • ( A m , ¯ B ) is contr ollable, and ( C m ¯ B ) is full rank. • If M ( s ) has no unstable zer os, then ¯ M ( s ) does not possess unstable zer os. Pr oof. The proof of Corollary 1 is giv en in the Appendix. Remark 2. If ( C m B m ) is full rank, then Z ( s ) = I m . Mor eover , the rank condition on ( C m B m ) is associated with the vector relative degr ee of MIMO systems. It can be easily shown that ( C m B m ) is full rank, if and only if the vector r elative degr ee is 1 m = [1 , . . . , 1] ∈ R m . F or systems with high relative de gr ees, ( C m B m ) has rank deficiency . 3 Corollary 2. Consider the state-space r epr esentation of the system (4) : ˙ x ( t ) = A m x ( t ) + B m u x ( t ) , y ( t ) = C m x ( t ) , x (0) = x 0 , wher e x ( t ) ∈ R n , u x ( t ) ∈ R m , y ( t ) ∈ R p ar e the state, input, and output vectors, respectively; x 0 ∈ R n is an initial condition. Let x v ( t ) ∈ R n and x z ( t ) ∈ R n z be the states of the following cascaded system: ˙ x z ( t ) = A z x z ( t ) + B z u x ( t ) , u v ( t ) = C z x z ( t ) + D z u x ( t ) , ˙ x v ( t ) = A m x v ( t ) + ¯ B u v ( t ) , y v ( t ) = C m x v ( t ) , x v (0) = x 0 , x z (0) = 0 , (7) wher e y v ( t ) ∈ R p is the output vector , and A z ∈ R n z × n z , B z ∈ R n z × m , C z ∈ R m × n z , D z ∈ R m × m , ¯ B ∈ R n × m ar e defined in Cor ollary 1. Then, for all t ≥ 0 x ( t ) = x v ( t ) + T z x z ( t ) , y v ( t ) = y ( t ) , (8) wher e T z ∈ R n × n z is full column rank satisfying (6) . Pr oof. The proof of Corollary 2 is in the Appendix. Remark 3. Cor ollary 2 pro vides a relationship between the states of the original system and the states of its cascaded r epresentation. Lemma 1. Consider the system M ( s ) given in (4) . Suppose M ( s ) has no unstable transmission zer os. F r om Cor ollary 1, let ¯ M ( s ) = C m ( s I n − A m ) − 1 ¯ B satisfying (5) . Define H = ¯ B C m ¯ B † , and A H = ( I n − H C ) A m , where ( C m ¯ B ) † is the generalized left in verse of C m ¯ B . Then, ( I n − H C m ) ¯ B = 0 , and there exists a gain K v ∈ R n × p such that A v = ( A H + K v C m ) is Hurwitz. Pr oof. The proof of Lemma 1 is in the Appendix. The following remark will be used later in the L yapunov analysis of the proposed adaptiv e controller . Remark 4. Let v ( t ) = ( I n − H C m ) x v ( t ) , wher e x v ( t ) ∈ R n is the state of the cascaded system (7) . Then, x v ( t ) = v ( t ) + H y ( t ) gives a state decomposition, wher e y ( t ) ∈ R p is the output. Since ( I n − H C m ) ¯ B = 0 , the dynamics of v ( t ) are not affected by the matched uncertainties. I I I . P RO B L E M F O R M U L A T I O N A. Pr oblem statement Consider the following MIMO system ˙ x ( t ) = A m x ( t ) + B m ( ω u ( t ) + f ( x, t )) , y ( t ) = C m x ( t ) , x (0) = x 0 , (9) where x ( t ) ∈ R n , u ( t ) ∈ R m , y ( t ) ∈ R p are state, input and measurable output vectors, respectively , with p ≥ m , and x 0 ∈ R n is an initial value. Moreov er , A m ∈ R n × n is a known Hurwitz matrix, B m ∈ R n × m and C m ∈ R p × n are kno wn matrices. Let ( A m , B m , C m ) be the minimal realization of M ( s ) = C m ( s I n − A m ) − 1 B m , which describes the desired dynamics of the closed-loop system; suppose M ( s ) has full column rank m . Finally , ω > 0 is an unknown constant input gain, and f : R × R n → R m is an unknown function representing matched uncertainties. Assumption 1. M ( s ) does not have unstable transmission zer os. Assumption 2. The unknown constant input gain satisfies ω ∈ C ω , wher e C ω = [ ω l , ω u ] is a known compact set with 0 < ω l < ω u . Assumption 3. Ther e exists b 0 > 0 such that k f (0 , t ) k < b 0 , ∀ t ≥ 0 , wher e b 0 is a known constant. Mor eover , for any δ > 0 ther e exist d δ > 0 , and b δ > 0 such that ∂ f ( x, t ) ∂ x ≤ d δ , ∂ f ( x, t ) ∂ t ≤ b δ , ∀k x k < δ, wher e d δ and b δ ar e known constants. Problem 1. Consider the system described by Equation (9) satisfying Assumptions 1-3. Design a feedback contr ol law for u ( t ) such that y ( t ) tracks the desir ed r esponse y m ( t ) both in transient and steady state, wher e y m ( t ) is the signal with the Laplace transform of y m ( s ) = M ( s ) K g r ( s ) with K g ∈ R m × m r being a feed-forwar d gain, and r ( t ) ∈ R m r being a r eference signal. B. P arametrization of uncertain function Lemma 2. Let τ > 0 , and let X ( t ) = [ X > 1 ( t ) , X > 2 ( t )] > be a continuous and (piecewise) differ entiable function, wher e X 1 ( t ) ∈ R n 1 , X 2 ( t ) ∈ R n 2 . Suppose that ˙ X τ L ∞ is finite. Consider a nonlinear function f ( X , t ) satisfying Assumption 3 and k f ( X, t ) k < ¯ d X k X 1 ( t ) k + ¯ b X , k X τ k L ∞ ≤ ρ X , 0 ≤ t ≤ τ , for some ρ X > 0 , ¯ d X > 0 and ¯ b X > 0 , Then, ther e e xist continuous and (piecewise) differ entiable θ ( t ) and σ ( t ) , such that f ( X, t ) = θ ( t ) k X 1 ( t ) k + σ ( t ) , ∀ t ∈ [0 , τ ] , and k θ ( t ) k ≤ ¯ d X , k ˙ θ ( t ) k ≤ ¯ l θ , k σ ( t ) k ≤ ¯ b X , k ˙ σ ( t ) k ≤ ¯ l σ , wher e ¯ l θ , ¯ l σ ar e computable finite bounds. Pr oof. See [5, Lemma A.9, Lemma A.10]. From Corollary 1, let { A z , B z , C z , D z } be the set of system matrices of Z ( s ) defined for M ( s ) , and T z ∈ R n × n z , ¯ B ∈ R n × m be matrices satisfying (6). Consider the following systems: ˙ x u ( t ) = A z x u ( t ) + B z u ( t ) , u z ( t ) = C z x u ( t ) + D z u ( t ) , x u (0) = 0 , (10) and ˙ x f ( t ) = A z x f ( t ) + B z f ( T g x g + T z x f , t ) , x f (0) = 0 , (11) 4 where x g ( t ) = [ x > v ( t ) , x > u ( t )] > , T g = [ I n , ω T z ] , and f ( · , t ) satisfies Assumption 3. The state x v ( t ) ∈ R n is governed by the following virtual system: ˙ x v ( t ) = A m x v ( t ) + ¯ B ( ω u z ( t ) + ¯ f ( X, t )) , y v ( t ) = C m x v ( t ) , x v (0) = x 0 , (12) where ¯ f ( X, t ) = C z x f ( t ) + D z f ( T g x g + T z x f , t ) , (13) with X = [ x > g ( t ) , x > f ( t )] > . By letting x z ( t ) = x f ( t ) + ω x u ( t ) , from Corollary 2 and Equations (10) - (13) it follo ws that x ( t ) = T g x g ( t ) + T z x f ( t ) , and y v ( t ) = y ( t ) for any t ≥ 0 , where x ( t ) , y ( t ) are solutions of (9). The following lemma gi ves a parameterization of the un- known function ¯ f ( X, t ) . Lemma 3. Consider the systems given by Equations (10) - (13) . Let τ > 0 , ρ x > 0 , and ρ u > 0 . Suppose k x τ k L ∞ ≤ ρ x , and k u τ k L ∞ ≤ ρ u , where x ( t ) = T g x g ( t ) + T z x f ( t ) . The function ¯ f ( X, t ) in (13) can be parameterized as follows ¯ f ( X, t ) = θ ( t ) k x g ( t ) k + σ ( t ) , 0 ≤ t ≤ τ , (14) and k θ ( t ) k ≤ ¯ d ρ x k ˙ θ ( t ) k ≤ ¯ l θ , k σ ( t ) k ≤ ¯ b ρ x , k ˙ σ ( t ) k ≤ ¯ l σ , (15) wher e ¯ l θ , ¯ l σ ar e computable finite bounds, and ¯ d ρ x , ¯ b ρ x ar e given by ¯ d ρ x = max ω ∈C ω ( k C z T † z T g k + k D z kk T g k d ρ x ) , ¯ b ρ x = k C z T † z k ρ x + k D z k k T ( s ) k L 1 d 2 ρ x ρ x + k D z k ( k T ( s ) k L 1 d ρ x + 1) b 0 , (16) with T ( s ) = T z ( s I n z − A z ) − 1 B z , and b 0 , d ρ x defined in Assumption 3. Pr oof. The proof of Lemma 3 is giv en in the Appendix. Remark 5. Let η t ( t ) = ¯ f ( X, t ) . The signal η t ( t ) can be viewed as the lumped matched uncertainty of the virtual system (see (12) ). F r om Lemma 3 the unknown signal η t ( t ) is r epresented by time-varying uncertain signals θ ( t ) and σ ( t ) . The conservative bounds of θ ( t ) and σ ( t ) ar e estimated by (15) , depending on the choice of the right interactor Z ( s ) . Notice that fr om (11) and (13) η t ( t ) can be seen as the uncertainty filter ed by Z ( s ) , since x ( t ) = T g x g ( t ) + T z x f ( t ) holds. I V . L 1 A DA P T I V E C O N T R O L L ER D E S I G N Let ρ 0 > 0 be a given constant satisfying k x 0 k ≤ ρ 0 with x 0 ∈ R n being an initial condition, and let ¯ γ > 0 be an arbitrarily small constant. For a giv en δ > 0 let L δ = ¯ δ ( δ ) δ d ¯ δ ( δ ) , ¯ δ ( δ ) = δ + ¯ γ , (17) where d ¯ δ ( δ ) is introduced in Assumption 3. Let Z − 1 ( s ) be a right interactor of sM ( s ) such that Z ( s ) = C z ( s I n z − A z ) − 1 B z + D z , where { A z ∈ R n z × n z , B z ∈ R n z × m , C z ∈ R m × n z } is a minimal realization of Z ( s ) . Notice that the existence of Z ( s ) is guaranteed by Corollary 1. Let T z ∈ R n × n z and ¯ B ∈ R n × m be matrices that satisfy (6). Let K v ∈ R n × p be a stabilizing gain so that A v = A H + K v C m (18) is Hurwitz (from Lemma 1 such K v exists), where A H = ( I n − H C m ) A m , H = ¯ B ( C m ¯ B ) † , (19) with ( C m ¯ B ) † being the generalized in verse of ( C m ¯ B ) . Let P y ∈ R p × p be a gi ven positi ve definite matrix, and P v ∈ R n × n be the positive definite matrix, which solves A > v P v + P v A v = − Q (20) for a positive definite Q ∈ R n × n with q < λ min ( Q ) . Define κ m = sup t ≥ 0 k e A m t k , κ y = q n λ max ( ¯ P v ) λ min ( P v ) , κ v = q n λ max ( ¯ P v ) λ min ( P y ) , (21) where ¯ P v = ( I n − H C m ) > P v ( I n − H C m ) . Let D ( s ) be a m × m transfer matrix such that for all ω ∈ C ω C ( s ) = ω C 0 ( s ) is stable with C (0) = I m , and C ( s ) Z − 1 ( s ) is strictly proper , where C 0 ( s ) = D ( s )( I m + ωD ( s )) − 1 . (22) Moreov er , it is assumed that D ( s ) ensures that there exists ρ r > 0 such that k G ( s ) k L 1 < ρ r − ρ ext − ρ int L ρ r ρ r , ω ∈ C ω , (23) where ρ ext = k H r ( s ) k L 1 k r k L ∞ + k G ( s ) k L 1 b 0 , ρ int =( κ m + κ x ) ρ 0 , κ x = k H 1 ( s ) k L 1 κ y + k H 2 ( s ) k L 1 κ v , (24) with κ m , κ y , and κ v being given in (21). Moreover , H r ( s ) = H 0 ( s ) C ( s ) K g , H 0 ( s ) = ( s I n − A m ) − 1 B m , H 1 ( s ) = ω H 0 ( s ) C 1 ( s ) , H 2 ( s ) = ω H 0 ( s ) C 2 ( s ) , (25) G ( s ) = H 0 ( s ) ( I m − C ( s )) , and C 1 ( s ) =( s + α ) C 0 ( s ) Z − 1 ( s )( C m ¯ B ) † , C 2 ( s ) = C 0 ( s ) Z − 1 ( s )( C m ¯ B ) † C m A m , (26) where α > 0 will be defined later . Notice that L ρ r satisfies (17) with d ρ x and ρ x = ρ r + ¯ γ . (27) Finally , let α > 0 be chosen to satisfy α y = 2 α − α φ > 0 , α φ = m ¯ d 2 ρ x q p P y C m ¯ B 2 2 , (28) where ¯ d ρ x is given in (16), and p P y ∈ R p × p is the upper triangular matrix satisfying the Cholesk y decomposition; P y = p P y > p P y . 5 Remark 6. Clearly , for small ¯ γ > 0 we have ρ x ≈ ρ r ; ρ r is used to char acterize the conservative bounds on the positively in variant set for the states of the closed-loop system. Consider the following control law u ( s ) = − D ( s ) Z − 1 ( s )( ˆ η t ( s ) − r z ( s )) , (29) where r z ( s ) = Z ( s ) K g r ( s ) , and ˆ η t ( s ) is the Laplace trans- form of ˆ η t ( t ) = ˆ ω ( t ) u z ( t ) + ˆ θ ( t ) k ˆ x g ( t ) k + ˆ σ ( t ) , (30) and ˆ ω ( t ) , ˆ θ ( t ) , ˆ σ ( t ) are the adaptiv e estimates, u z ( t ) is giv en in (10), x g ( t ) = [ ˆ x > v ( t ) , x > u ( t )] > , x u ( t ) is defined in (10), and ˆ x v ( t ) = ˆ v ( t ) + H y ( t ) with ˆ v ( t ) being given by the follo wing predictor: ˙ ˆ v ( t ) = A v ˆ x v ( t ) − K v y ( t ) − P − 1 v A > m C > m P y ˜ y ( t ) , ˙ ˆ y ( t ) = − α ˜ y ( t ) + C m A m ˆ x v ( t ) + C m ¯ B ˆ η t ( t ) , ˆ v (0) =0 , ˆ y ( t ) = y 0 , (31) where y 0 = C m x 0 is assumed to be known, ˜ y ( t ) = ˆ y ( t ) − y ( t ) , and A v is giv en in (18). Consider the following adaptive laws: ˙ ˆ ω ( t ) =Γ ω Pro j( ˆ ω ( t ) , − u > z ( t ) e y ( t )) , ˆ ω (0) = 1 , ˙ ˆ θ ( t ) =Γ θ Pro j( ˆ θ ( t ) , −k ˆ x g ( t ) k e y ( t )) , ˆ θ (0) = 0 , ˙ ˆ σ ( t ) =Γ σ Pro j( ˆ σ ( t ) , − e y ( t )) , ˆ σ (0) = 0 , (32) where Γ ω > 0 , Γ θ > 0 , Γ σ > 0 are adaptation gains, and e y ( t ) = ¯ B > C > m P y ˜ y ( t ) . Pro j( · , · ) denotes the projection operator which is widely used in adaptive control; the operator provides smooth transition of the estimates on the apriori known boundary of uncertainties (see [38]). V . S TA B I L I T Y A N A L Y S I S Consider the following closed-loop reference system ˙ x ref ( t ) = A m x ref ( t ) + B m ( ω u ref ( t ) + f ( x ref , t )) , y ref ( t ) = C m x ref ( t ) , x ref (0) = 0 , (33) with u ref ( s ) = C 0 ( s ) ( K g r ( s ) − η ref ( s )) , (34) where x ref ( t ) ∈ R n , y ref ( t ) ∈ R p are the reference system states and outputs, respecti vely , r ( s ) is the Laplace transform of the reference command r ( t ) ∈ R m r , K g ∈ R m × m r is a feed-forward gain, and C 0 ( s ) is giv en in (22). Moreov er , η ref ( s ) is the Laplace transform of f ( x ref , t ) . The closed-loop reference system in (33) and (34) represents the best achievable performance of the L 1 adaptiv e archi- tecture [5]. It is not implementable since it depends on the unknowns; it is used only for analysis purposes. Lemma 4. Consider the closed-loop refer ence system given in (33) and (34) and design constraints defined via (17) - (27) . Then, for each ω ∈ C ω and τ > 0 the following bound holds x ref τ L ∞ ≤ ρ rx , (35) wher e ρ rx = ρ r − ρ int 1 − k G ( s ) k L 1 L ρ r > 0 , (36) with ρ int , G ( s ) given in (24) and (25) , r espectively . Moreover , u ref τ L ∞ ≤ ρ ru , (37) wher e ρ ru = k C 0 ( s ) k L 1 ( L ρ r ρ rx + b 0 ) + k C 0 ( s ) K g k L 1 k r k L ∞ , (38) with C 0 ( s ) defined in (22) . Pr oof. Notice that from (23) and (36) one has ρ rx > ρ ext ≥ 0 , (39) where ρ ext is defined in (24). Substituting the control law giv en by Equation (34) into (33), it follo ws that x ref ( s ) = H r ( s ) r ( s ) + G ( s ) η ref ( s ) u ref ( s ) = C 0 ( s )( K g r ( s ) − η ref ( s )) , y ref ( s ) = C m x ref ( s ) , (40) where η ref ( s ) is the Laplace transform of f ( x ref , t ) , and C 0 ( s ) , { H r ( s ) , G ( s ) } are given in (22) and (25), respectively . The resulting closed-loop reference system giv en by Equation (40) is equiv alent to the one in [5, Chapter 2]. Therefore, the rest of the proof follows from [5, Chapter 2], and is omitted for the sake of brevity . Notice that the stability of the reference system can be guaranteed by designing a filter with high-bandwidth (see Equation (23)). Howe ver , a high bandwidth filter may lead to loss of robustness to time delay [5]. The choice of a filter defines the trade-off between performance and robustness. Differently from existing L 1 adaptiv e state-feedback solu- tions, the present approach additionally requires a minimum order filter (i.e., C ( s ) Z − 1 ( s ) is proper). Such condition is typ- ical for output-feedback approaches. For e xample, the methods of [31], [32] require choosing a low-pass filter dependent upon the system’ s relative degree. Since the L 1 reference system is identical to that of the existing L 1 state-feedback, the problem of designing an appropriate filter can be tackled by existing optimal filter design techniques (e.g., see [39]). Remark 7. Notice that the condition given in (23) depends on the upper bound of the partial derivative of f ( x, t ) which, in turn, depends on the unknown initial condition. Thus, the stability r esult in Lemma 4 is semi-global. However , in the case wher e the uncertain function f ( x, t ) has globally bounded partial derivatives (e.g. d δ ≡ L for some constant L > 0 ), the stability r esults become global (see the details in [5, Chapter 3]). Now , the closed-loop system stability is analyzed and the transient and steady-state performance bounds are deriv ed. T o demonstrate the stability of the closed-loop system with the proposed L 1 control laws (29)-(32), we show that the difference between the closed-loop system and the ideal reference system is semi-globally bounded with arbitrarily small steady-state bounds. Moreover , we demonstrate that the transient performance errors due to non-zero initial conditions 6 are bounded by strictly decreasing functions. Before stating the main results, we introduce a fe w variables of interest. Let γ u 0 = k C 0 ( s ) k L 1 L ρ r γ x 0 + ( k C 1 ( s ) k L 1 κ y + k C 2 ( s ) k L 1 κ v ) , γ x 0 = κ x + κ m 1 − k G ( s ) k L 1 L ρ r , γ u = k C 0 ( s ) k L 1 L ρ r γ x + k C 1 ( s ) k L 1 p λ min ( P y ) + k C 2 ( s ) k L 1 p λ min ( P v ) , γ x = λ min ( P y ) − 1 2 k H 1 ( s ) k L 1 + λ min ( P v ) − 1 2 k H 2 ( s ) k L 1 1 − k G ( s ) k L 1 L ρ r , (41) where { κ m , κ y , κ v } , κ x , { H 1 ( s ) , H 2 ( s ) } , and { C 1 ( s ) , C 2 ( s ) } are giv en in (21), (24), (25), and (26), respectiv ely . Let γ > 0 be a small constant that verifies γ x γ < ¯ γ , γ u γ < ¯ γ , ∀ ω ∈ C ω . (42) Finally , let ρ u , ρ dx , and ρ du be ρ u = ρ ru + ρ du , ρ dx = γ x 0 ρ 0 + ¯ γ , ρ du = γ u 0 ρ 0 + ¯ γ , (43) respectiv ely , where ρ ru is defined in (38). Lemma 5. Consider the system given by Equation (9) with contr ol law defined in (29) - (32) . Let τ > 0 be a positive constant. If k x τ k L ∞ ≤ ρ x and k u τ k L ∞ ≤ ρ u , then for all t ∈ [0 , τ ] the output-estimation error verifies k ˜ y ( t ) k ≤ κ y e − λ 1 2 t k x 0 k + s θ 1 λ min ( P y ) 1 √ Γ , (44) wher e κ y is defined in (21) , and λ 1 = min λ min ( Q v ) λ max ( P v ) , α y , θ 1 = θ 0 + 4 m ¯ d ρ x ¯ l θ + ¯ b ρ x ¯ l σ λ 1 , θ 0 = 4 ω 2 u + m ¯ d 2 ρ x + m ¯ b 2 ρ x , Γ = min (Γ ω , Γ θ , Γ σ ) , (45) with Q v = Q − q I n 0 , α y > 0 given in (28) , and ¯ d ρ x , ¯ l θ , ¯ b ρ x , ¯ l σ satisfying (15) . Pr oof. The proof of Lemma 5 is giv en in the Appendix. Lemma 5 states that the output estimation errors are expo- nentially conv ergent to a set, whose bound depends on both the upper bound of θ 1 and the adaptation gain Γ . Equation (44) implies that high values of adaptation gains achieve arbitrarily small estimation errors. Theorem 2. Consider the closed-loop system with L 1 adaptive output feedback contr oller defined via (29) - (32) , subject to the design constraints in (17) - (28) . Suppose the adaptation gains ar e chosen sufficiently high to satisfy Γ > θ 1 γ 2 , (46) wher e Γ , θ 1 ar e defined in (45) , and γ satisfies (42) . Then, the following upper bounds hold: k x ref − x k L ∞ ≤ ρ dx , k u ref − u k L ∞ ≤ ρ du , (47) and k y ref − y k L ∞ ≤ k C m k ρ dx , k x k L ∞ ≤ ρ x , k u k L ∞ ≤ ρ u . (48) Mor eover , for each ω ∈ C ω ther e exist positive constants of γ dx and γ dy , and strictly decreasing functions of υ dx ( t ) and υ dy ( t ) , such that for all t ≥ 0 k x ref ( t ) − x ( t ) k ≤ υ dx ( t ) k x 0 k + γ dx √ Γ , k y ref ( t ) − y ( t ) k ≤ υ dy ( t ) k x 0 k + γ dy √ Γ . (49) Pr oof. The proof of Theorem 2 is shown in the Appendix. Theorem 2 implies that tracking errors asymptotically con- ver ge to an in variant set that can be made sufficiently small via high adaptation gains. Notice that υ dx ( t ) and υ dy ( t ) in (49) are independent of the adaptation gain, which is subject to the lower bound in (46). Therefore, the transient performance due to non-zero initial conditions is quantified by strictly decreasing functions, and the steady-state errors can be arbitrarily reduced by increasing the adaptation gain. Remark 8. In the pr esent section the closed-loop stability is analyzed under the assumption that y 0 is known. In the case when y 0 is not pr ecisely measur ed due to sensor noise, one can easily derive similar stability r esults following the same pr oof, setting ˆ y (0) = 0 and ¯ P v = P v . V I . I L L U S T R A T I V E E X A M P L E S In this section, two examples are illustrated to validate our claims. A. Academic example Consider the nonlinear system (9) with A m = − 2 0 1 1 − 5 2 1 0 − 5 . 5 , B m = 2 2 . 5 − 3 , C m = − 5 10 5 1 . 25 − 1 0 , where the unknown input gain is Ω = 0 . 8 ∈ [0 . 7 , 1 . 2] , and the nonlinear uncertainty is set to be f ( x, t ) = f 1 ( x, t ) with f 1 ( x, t ) =0 . 11 k x k 2 2 + 0 . 23 x 1 tanh(0 . 5 x 1 ) x 1 + 1 . 24 x 2 x 3 + 0 . 8(1 − e − 0 . 7 t ) + 2 . 0 . For the L 1 adaptiv e controller D ( s ) and Z ( s ) are selected as D ( s ) = 5 s ( s/ 11+1) , and Z ( s ) = 1 s/ 4+1 . In simulations, we let r ( t ) = 2 + 2 sin 3 t and x 0 = [ − 0 . 6 , 0 . 6 , − 0 . 9] > . Figure 1 illustrates the output trajectories and control inputs of the reference system and the closed- loop system for the adaptation gain Γ = 500 ; the time- delay margin is numerically in vestig ated and is 0 . 45 s . Figure 2 demonstrates time histories of the tracking errors (i.e., 7 k x ref − x k ) and estimation errors (i.e., k ˆ y − y k ) for different choices of adaptation gains. The steady-state tracking errors are reduced with high adaptation gain, and the transient errors are decreasing ov er time for the non-zero initial condition, as expected per analysis in Section V. Finally , we consider a different uncertainty by letting f ( x, t ) = f 2 ( x, t ) with f 2 ( x, t ) =0 . 15 k x k 2 2 + 0 . 22 x 1 tanh(0 . 2 x 1 ) x 1 + 1 . 34 x 2 x 3 + 0 . 5(1 − e − 1 . 1 t ) + 1 . 8 , and apply the same controller . The system outputs and the control signal are plotted in Figure 3; asymptotic tracking of the reference outputs is achieved without any retuning of the controller . Fig. 1: System responses with Γ = 500 and f 1 ( x, t ) Fig. 2: Tracking and estimation errors Fig. 3: System responses with Γ = 500 and f 2 ( x, t ) B. Inverted pendulum on a cart In this section, we demonstrate the proposed method by designing the adaptiv e controller for an in verted pendulum on a cart. The control input is designed for the purpose of tracking a reference position, while maintaining the inv erted pendulum balanced upright. The nonlinear model of the in verted pendu- lum is given by ¨ p ( t ) − ω u ( t ) − ν ˙ p ( t ) + F f ric ( t ) + d ( t ) M + m = − ml cos θ ( t ) ¨ θ ( t ) − ml sin θ ( t ) ˙ θ 2 ( t ) M + m , ml cos θ ¨ p ( t ) − mg l sin θ ( t ) + ( I + ml 2 ) ¨ θ ( t ) = 0 , (50) where p ( t ) ∈ R , θ ( t ) ∈ R are the cart position and pendulum angle (measurable outputs), respecti vely; u ( t ) is the control input, d ( t ) is the input disturbance, and ω > 0 , ν > 0 are the motor constants. F f ric ( t ) is the nonlinear dynamic friction computed as [40]: F f ric ( t ) = − 73 ˙ p ( t ) − 121 z ( t ) 1 − 70 k ˙ p ( t ) k h ( ˙ p ( t )) , ˙ z ( t ) = ˙ p ( t ) − 121 k ˙ p ( t ) k h ( ˙ p ( t )) z ( t ) , (51) with h ( ˙ p ( t )) = − (0 . 04287 + 0 . 0432 e − ( ˙ p ( t ) 0 . 105 ) 2 )( m + M ) g . The nominal system parameters are selected as [40]: M 0 = 0 . 815 , m 0 = 0 . 210 , l 0 = 0 . 305 , ω 0 = 1 . 719 , and ν 0 = 7 . 682 . More- ov er , it is assumed that the system has parameter v ariations from the nominal values, and therefore M = 1 . 2 M 0 , m = 0 . 8 m 0 , l = 1 . 2 l 0 , ω = 1 . 2 ω 0 , ν = 1 . 5 ν 0 . (52) For the purposes of comparison, we first consider a standard LQR controller for the system (50) [41]. By letting F f ric ( t ) ≡ 0 and d ( t ) ≡ 0 , the controller is obtained by linearizing the nonlinear model at ( p e , θ e ) = (0 , 0) , together with cos θ ( t ) ≈ 1 . The LQR gain K lq r is given by K lq r = [ − 7 . 0711 , − 14 . 4505 , − 43 . 7667 , − 7 . 6739] . For the L 1 controller , the desired model is chosen identical to the nominal (linearized) closed-loop system obtained by the LQR controller: A m = 0 1 0 0 14 . 62 20 . 64 88 . 23 15 . 87 0 0 0 1 − 44 . 26 − 62 . 47 − 237 . 34 − 48 . 04 , B m = 0 2 . 07 0 − 6 . 26 > , C m = 1 0 0 0 0 0 1 0 , with the state vector x ( t ) = [ p ( t ) , ˙ p ( t ) , θ ( t ) , ˙ θ ( t )] > , and the reference position command r ( t ) . Since the desired model is obtained from the linearization, the uncertain function f ( x, t ) in (9) includes the linearization errors, parameter v ariations, non-linear friction F f ric ( t ) , and input disturbance d ( t ) . Notice that ( C m B m ) = 0 . Therefore, we define the right interactor as Z ( s ) = 0 . 47 / ( s + 30) , and choose D ( s ) = 30 s ( s/ 70+1)( s/ 100+1) . The set of parameters of the L 1 adaptiv e controller is given by Q v = 10 I 4 , P y = I 2 , α = 25 , Γ = 500 , and K g = − 7 . 07 ; the predictor gain K v is given by K v = − 4 . 51 − 22 . 087 − 1 . 56 36 . 98 − 1 . 56 − 22 . 91 − 2 . 87 40 . 55 > . W e present simulation results for two cases. The first case considers the nominal nonlinear dynamics, with F f ric ( t ) ≡ 0 , d ( t ) ≡ 0 , and zero initialization errors. Figure 4 illustrates and compares the system responses and control inputs for the LQR controller and the L 1 controller . From the plots it can be noted that there is no significant difference in the performance of the solutions; this is not surprising, since the only uncertainties 8 that affect the performance of the controllers are the lin- earization errors. The second scenario considers the nonlinear system giv en by (50) with parametric variations given in (52), with the nonlinear friction gi ven by (51), input disturbance d ( t ) = 3 sin ( t ) , and non-zero initial conditions (the state is initialized as follows: x 0 = [ − 0 . 5 , − 1 , 0 . 1745 , 0] > ). The results are illustrated in Figures 5 and 6. As expected, the L 1 controller ensures close tracking of the position, and boundedness of the angle within a neighborhood of zero, in spite of the uncertainties and non-zero initial errors, thus validating the theoretical claims. Fig. 4: Inv erted pendulum: position, angle, and control input for scenario 1. Fig. 5: Inv erted pendulum: position, angle, and control input for scenario 2. V I I . C O N C L U S I O N S This paper presents an L 1 adaptiv e output feedback con- troller for non-square under-actuated MIMO systems with matched uncertainties. The controller design is based on the right interactor matrix, which is used to handle the non-square structure of the system through appropriate reparameterization of the system’ s equations. The control algorithm exhibits guaranteed performance in the transient and steady state under mild assumptions on the uncertainties and unknown initial error . Rigorous theoretical analysis and simulation results validate the performance of the proposed controller . Fig. 6: In verted pendulum: adapti ve gain dynamics for scenario 2. R E F E R E N C E S [1] S. Sastry and M. Bodson, Adaptive Contr ol: Stability , Con ver gence and Robustness . Advanced Reference, Englew ood Cliffs, NJ: Prentice Hall, 1989. [2] K. S. Narendra and A. M. Annaswamy , Stable Adaptive Systems . Information and System Sciences, Englew ood Cliffs, NJ: Prentice Hall, 1989. [3] M. Krsti ´ c, I. Kanellakopoulos, and P . V . K okotovi ´ c, Nonlinear and Adaptive Contr ol Design . New Y ork, NY : John Wiley & Sons, 1995. [4] K. J. ˚ Astr ¨ om and B. W ittenmark, Adaptive contr ol . Boston, MA: Addison-W esley Longman Publishing Co., Inc., 1994. [5] N. Hovakimyan and C. Cao, L 1 Adaptive Contr ol Theory . Philadelphia, P A: Society for Industrial and Applied Mathematics, 2010. [6] A. J. Calise, M. Sharma, and J. E. Corban, “ Adaptiv e autopilot design for guided munitions, ” Journal of Guidance, Control, and Dynamics , vol. 23, pp. 837–843, September 2000. [7] J. S. Brinker and K. A. Wise, “Flight testing of reconfigurable control law on the x-36 tailless aircraft, ” Journal of Guidance, Control and Dynamics , vol. 24, pp. 903–909, September 2001. [8] K. W ise, E. Lavretsk y , J. Zimmerman, J. Francis, D. Dixon, and B. Whitehead, “ Adaptive flight control of a sensor guided munition, ” in AIAA Guidance, Navigation, and Contr ol Conference and Exhibit , American Institute of Aeronautics and Astronautics (AIAA), August 2005. [9] I. M. Gregory , E. Xargay , C. Cao, and N. Hovakimyan, “Flight test of L 1 adaptiv e control law: Offset landings and large flight env elope modeling work, ” in AIAA Guidance, Navigation and Contr ol Confer ence , (Portland, OR), August 2011. AIAA–2011–6608. [10] K. Ackerman, E. Xargay , R. Choe, N. Hovakimyan, M. C. Cotting, R. B. Jeffrey , M. P . Blackstun, T . P . Fulkerson, T . R. Lau, and S. S. Stephens, “ L 1 stability augmentation system for calspan’ s variable- stability learjet, ” in AIAA Guidance, Navigation and Contr ol Confer ence , (San Diego, CA), January 2016. [11] H. Lee, S. Snyder , and N. Hovakimyan, “ L 1 adaptiv e control within a flight en velope protection system, ” Journal of Guidance, Control and Dynamics , pp. 1–14, January 2017. [12] P . A. Ioannou and J. Sun, Robust Adaptive Control . Upper Saddle Riv er , NJ: Prentice Hall, 1996. [13] G. T ao and P . A. Ioannou, “Robust model reference adaptive control for multiv ariable plants, ” International Journal of Adaptive Contr ol and Signal Pr ocessing , vol. 2, pp. 217–248, September 1988. [14] R. Costa, L. Hsu, A. Imai, and G. T ao, “ Adaptive backstepping control design for MIMO plants using factorization, ” in American Control Confer ence , (Anchorage, AK), IEEE, May 2002. [15] P . Kokotovic, M. Krstic, and I. Kanellakopoulos, “Backstepping to passivity: recursive design of adaptive systems, ” in IEEE Confer ence on Decision and Control , Institute of Electrical and Electronics Engineers (IEEE), December 1992. [16] M. Jankovic, “ Adaptiv e nonlinear output feedback tracking with a partial high-gain observer and backstepping, ” IEEE T ransactions on Automatic Contr ol , vol. 42, no. 1, pp. 106–113, 1997. 9 [17] P . Sannuti and A. Saberi, “Special coordinate basis for multiv ariable linear systems—finite and infinite zero structure, squaring down and decoupling, ” International Journal of Control , vol. 45, pp. 1655–1704, May 1987. [18] E. Lavretsky , “ Adaptive output feedback design using asymptotic proper- ties of LQG/L TR controllers, ” IEEE T ransactions on A utomatic Control , vol. 57, pp. 1587–1591, June 2012. [19] T . E. Gibson, Z. Qu, A. M. Annaswamy , and E. Lavretsky , “ Adaptiv e output feedback based on closed-loop reference models, ” IEEE T rans- actions on Automatic Control , vol. 60, no. 10, pp. 2728–2733, 2015. [20] I. Mizumoto, T . Chen, S. Ohdaira, M. Kumon, and Z. Iwai, “ Adaptiv e output feedback control of general MIMO systems using multirate sampling and its application to a cart–crane system, ” Automatica , vol. 43, pp. 2077–2085, December 2007. [21] E. Lavretsk y , “Robust and adaptive output feedback control for non- minimum phase systems with arbitrary relative degree, ” in AIAA Guid- ance, Navigation, and Control Conference , American Institute of Aero- nautics and Astronautics, Jan 2017. [22] P . Misra, “Numerical algorithms for squaring-up non-square systems, part ii: General case, ” in 1998 American Contr ol Conference , (San Francisco, CA), June 1998. [23] C. Cao and N. Hov akimyan, “Design and analysis of a novel L 1 adap- tiv e control architecture with guaranteed transient performance, ” IEEE T ransactions on Automatic Control , vol. 53, pp. 586–591, March 2008. [24] E. Xargay , N. Hov akimyan, and C. Cao, “ L 1 adaptiv e controller for multi-input multi-output systems in the presence of nonlinear unmatched uncertainties, ” in American Control Conference , Institute of Electrical and Electronics Engineers (IEEE), June 2010. [25] J. W ang, V . V . Patel, C. Cao, N. Hov akimyan, and E. Lavretsky , “Novel L 1 adaptiv e control methodology for aerial refueling with guaranteed transient performance, ” Journal of Guidance, Contr ol and Dynamics , vol. 31, pp. 182–193, January–February 2008. [26] B. Griffin, J. Burken, and E. Xargay , “ L 1 adaptiv e control augmentation system with application to the x-29 lateral/directional dynamics: A multi-input multi-output approach, ” in AIAA Guidance, Navigation and Contr ol Conference , American Institute of Aeronautics and Astronautics, August 2010. [27] I. Kaminer, A. Pascoal, E. Xargay , N. Hovakimyan, C. Cao, and V . Dobrokhodov , “Path following for unmanned aerial vehicles using L 1 adaptiv e augmentation of commercial autopilots, ” Journal of Guid- ance, Control and Dynamics , vol. 33, pp. 550–564, March–April 2010. [28] N. Hov akimyan, C. Cao, E. Kharisov , E. Xargay , and I. M. Gregory , “ L 1 adaptiv e control for safety-critical systems, ” IEEE Contr ol Systems Magazine , vol. 31, pp. 54–104, October 2011. [29] M. Bichlmeier, F . Holzapfel, E. Xargay , and N. Hov akimyan, “ L 1 adaptiv e augmentation of a helicopter baseline controller , ” in AIAA Guidance, Navigation and Control Conference , American Institute of Aeronautics and Astronautics, August 2013. [30] K. A. Ackerman, E. Xargay , R. Choe, N. Hovakimyan, M. C. Cotting, R. B. Jeffrey , M. P . Blackstun, T . P . Fulkerson, T . R. Lau, and S. S. Stephens, “Evaluation of an L 1 adaptiv e flight control law on calspan’s variable-stability learjet, ” Journal of Guidance, Control and Dynamics , vol. 40, pp. 1051–1060, April 2017. [31] C. Cao and N. Hov akimyan, “ L 1 adaptiv e output-feedback controller for non-stricly-positiv e-real reference systems: Missile longitudinal autopi- lot design, ” AIAA J ournal of Guidance, Contr ol, and Dynamics , vol. 32, pp. 717–726, May-June 2009. [32] E. Kharisov and N. Hov akimyan, “ L 1 adaptiv e output feedback con- troller for minimum phase systems, ” in American Contr ol Conference , (San Francisco, CA), June–July 2011. [33] H. Lee, V . Cichella, and N. Hovakimyan, “ L 1 adaptiv e output feed- back augmentation of model reference control, ” in American Control Confer ence , (Portland, OR), June 2014. [34] H. Mahdianfar, N. Hovakimyan, A. Pavlov , and O. M. Aamo, “ L 1 adaptiv e output regulator design with application to managed pressure drilling, ” Journal of Process Control , vol. 42, pp. 1–13, June 2016. [35] H. Lee, S. Snyder, and N. Hovakimyan, “ L 1 adaptiv e output feedback augmentation for missile systems, ” IEEE T ransactions on Aer ospace and Electr onic Systems , vol. 54, pp. 680–692, April 2018. [36] X. Xin and T . Mita, “ A simple state-space design of an interactor for a non-square system via system matrix pencil approach, ” Linear Algebra and its Applications , vol. 351-352, pp. 809–823, August 2002. [37] X. Xin and T . Mita, “Inner-outer factorization for non-square proper functions with infinite and finite j omega -axis zeros, ” International Journal of Contr ol , vol. 71, pp. 145–161, January 1998. [38] J.-B. Pomet and L. Praly , “ Adaptive nonlinear regulation: Estimation from the Lyapunov equation, ” IEEE T ransactions on A utomatic Control , vol. 37, pp. 729–740, June 1992. [39] K.-K. K. Kim and N. Ho vakimyan, “Multi-criteria optimization for filter design of L 1 adaptiv e control, ” Journal of Optimization Theory and Applications , vol. 161, pp. 557–581, September 2013. [40] S. A. Campbell, S. Crawford, and K. Morris, “Friction and the in verted pendulum stabilization problem, ” Journal of Dynamic Systems, Mea- sur ement, and Control , vol. 130, no. 5, p. 054502, 2008. [41] P . J. Antsaklis and A. N. Michel, Linear systems . Englewood Cliffs, NJ: McGraw-Hill, 1997. [42] E. Davison and S. W ang, “Properties and calculation of transmission zeros of linear multiv ariable systems, ” Automatica , vol. 10, pp. 643– 658, December 1974. A P P E N D I X Proof of Corollary 1 . Notice that ( C m B m ) = lim s →∞ ( sM ( s )) . Let M 0 ( s ) = sM ( s ) , and M 0 ( s ) = C ( s I n − A ) − 1 B + D with A = A m , B = B m , C = C m A m , and D = C m B m . Since { A m , B m , C m } is controllable-observable, and A m is Hurwitz, the triple { A, B , C } is also controllable-observable. Therefore, from Theorem 1 it follows that there exists a right interactor Z − 1 ( s ) which satisfies (2) with T z ∈ R n × n z , ¯ B ∈ R n × m , and ¯ D ∈ R p × m ; ( A m , ¯ B ) is controllable. Since Equation (2) holds, one has ( ¯ D − C m ¯ B ) C z A − 1 z = C m T z , ( ¯ D − C m ¯ B ) D z = C m T z B z , which further leads to ( ¯ D − C m ¯ B )( D z − C z A − 1 z B z ) = 0 . (53) Notice that both ( D z − C z A − 1 z B z ) and ¯ D are full rank (see Theorem 1). From (53) it follo ws that ¯ D = C m ¯ B holds. Therefore, ( C m ¯ B ) is full rank, and Equation (6) follows from (2). Finally , suppose that M ( s ) has no unstable transmission zeros. Notice that pole-zero cancellations in ¯ M ( s ) Z ( s ) only happen in C − , since A z is Hurwitz, and therefore, ¯ M ( s ) cannot have any unstable transmission zeros. This completes the proof. Proof of Corollary 2 . Notice that Equation (7) can be rewrit- ten as ˙ x v ( t ) ˙ x z ( t ) = A m ¯ B C z 0 A z x v ( t ) x z ( t ) + ¯ B D z B z u x ( t ) , y v ( t ) = C m 0 x v ( t ) x z ( t ) . (54) Now , let [ x > t ( t ) , x > z ( t )] > = T t [ x > v ( t ) , x > z ( t )] > with T t = I n T z 0 I n z . By applying a similarity transform with T t , from (54) it follows, together with (6), that ˙ x z ( t ) = A z x t ( t ) + B z u x ( t ) , ˙ x t ( t ) = A m x t ( t ) + B m u x ( t ) , y v ( t ) = C m x t ( t ) , with x t (0) = x 0 , and x z (0) = 0 . This implies that x ( t ) = x t ( t ) for all t ≥ 0 . Therefore, Equation (8) holds, which completes the proof. Proof of Lemma 1 . Since M ( s ) does not have any transmis- sion zeros by hypothesis, from Corollary 1 it follo ws that ¯ M ( s ) has no unstable transmission zeros, and ( C m ¯ B ) is 10 full rank. Notice that ( C m ¯ B ) † ( C m ¯ B ) = I m , and therefore H = B m ( C m ¯ B ) † satisfies ( I n − H C m ) ¯ B = 0 . Next we show that ( A H , C m ) is a detectable pair , which ensures the existence of a stabilizing gain K v such that A v is Hurwitz. Suppose that z i ∈ C is an unobservable mode of ( A H , C m ) . By Popov-Belevitch-Hautus observ ability test [41, Chapter 3], there exists a non-zero vector ξ i ∈ R n such that A H ξ i = z i ξ i , C m ξ i = 0 , (55) which yields ( z i I n − A m ) ξ i + H C m A m ξ i = 0 . Let ς i = ( C m ¯ B ) † C m A m ξ i ∈ R m . Then, it follows that ¯ B ς i = ¯ B ( C m ¯ B ) † C m A m ξ i = H C m A m ξ i . (56) Combining (55) - (56), one has R ( z i ) ξ i ς i = 0 0 , R ( z i ) = z i I n − A m ¯ B − C m 0 , where [ ξ > i , ς > i ] 6 = 0 . Since { A m , ¯ B , C m } is a minimal realiza- tion, from rank ( R ( z i )) < n + m it follows that z i must be the transmission zero of M ( s ) [42]. Finally , since ¯ M ( s ) does not possess unstable transmission zeros, z i ∈ C − holds. Therefore, ( A H , C m ) is detectable, which completes the proof. Proof of Lemma 3 . Since k x τ k L ∞ ≤ ρ x , from (11) it follows that k T z x z k L ∞ [0 ,τ ] ≤ k T ( s ) k L 1 d ρ x ρ x + k T ( s ) k L 1 b 0 , (57) which yields k X τ k L ∞ ≤ ρ X for some ρ X > 0 , where d ρ x , b 0 are given in Assumption 3, and T ( s ) = T z ( s I n z − A z ) − 1 B z . Moreov er , notice that x z ( t ) = T † z T g x g ( t ) + T † z x ( t ) , where T † z is the generalized in verse of T z . From (13), one has ¯ f ( X, t ) = C z T † z T g x g ( t ) + C z T † z x ( t ) + D z f ( T g x g + T z x f , t ) . (58) Notice that using Assumption 3 on f ( x, t ) it is easy to show that the partial deri v ati ves of ¯ f ( X, t ) are (semi- globally) bounded. Moreov er , by using the fact that k T g x g + T z x f k L ∞ [0 ,τ ] ≤ ρ x , from (57) and (58) it follows that k ¯ f ( X, t ) k < ¯ d ρ x k x g ( t ) k + ¯ b ρ x , 0 ≤ t ≤ τ , where ¯ d ρ x , ¯ b ρ x are giv en in (16). Notice that k x τ k L ∞ ≤ ρ x and k u τ k L ∞ ≤ ρ u , along with (10) - (12), imply that k ˙ X ( t ) k is finite for all 0 ≤ t ≤ τ . Therefore, from Lemma 2 the main result of Lemma 3 follows, which completes the proof. Proof of Lemma 5 . Since k x τ k L ∞ ≤ ρ x and k u τ k L ∞ ≤ ρ u by assumption, Lemma 3 holds. Combining (12) and (14) yields ˙ x v ( t ) = A m x v ( t ) + ¯ B ( ω u z ( t ) + θ ( t ) k x g ( t ) k + σ ( t )) , y ( t ) = C m x v ( t ) , x v (0) = x 0 , (59) where x g ( t ) = [ x > v ( t ) , x > u ( t )] , and x u ( t ) , u z ( t ) are given in (10). Notice that from Corollary 2 and Equations (10) - (13) it follows that x ( t ) = x v ( t ) + T z ( ω x u ( t ) + x f ( t )) holds, where x f ( t ) is defined in (11), and T z ∈ R n × n f satisfies (6). Let v ( t ) = ( I n − H C m ) x v ( t ) . By pre-multiplying both sides of (59) by ( I n − H C m ) and taking the deri v ati ve of y ( t ) , it follows that ˙ v ( t ) = A H v ( t ) + A H H y ( t ) , v (0) = v 0 , ˙ y ( t ) = C m A m v ( t ) + C m A m H y ( t ) (60) + C m ¯ B ( ω u z ( t ) + θ ( t ) k x g ( t ) k + σ ( t )) , y (0) = y 0 , where v 0 = ( I n − H C m ) x 0 , and { A H , H } is giv en in (19). Let ˜ η t ( t ) = ˜ ω ( t ) u z ( t ) + ˜ θ ( t ) k ˆ x g ( t ) k + ˜ σ ( t ) , (61) and φ ( t ) = θ ( t )( k ˆ x g ( t ) k − k x g ( t ) k ) , (62) where ˜ ω ( t ) = ˆ ω ( t ) − ω , ˜ θ ( t ) = ˆ θ ( t ) − θ ( t ) , and ˜ σ ( t ) = ˆ σ ( t ) − σ ( t ) . Let ˜ v ( t ) = ˆ v ( t ) − v ( t ) , ˜ y ( t ) = ˆ y ( t ) − y ( t ) . (63) Then, subtracting (60) from (31) yields ˙ ˜ v ( t ) = A v ˜ v ( t ) − P − 1 v A > m C > m P y ˜ y ( t ) , ˙ ˜ y ( t ) = − α ˜ y ( t ) + C m A m ˜ v ( t ) + C m ¯ B ( ˜ η t ( t ) + φ ( t )) , ˜ v (0) = − v 0 , ˜ y (0) = 0 , (64) where A v is Hurwitz (see (18)), and ˜ η t ( t ) , φ ( t ) are gi ven in (61), and (62), respectiv ely . Consider the L yapunov function: V ( t ) =˜ v > ( t ) P v ˜ v ( t ) + ˜ y > ( t ) P y ˜ y ( t ) + ˜ ω 2 ( t ) Γ ω + ˜ θ > ( t ) ˜ θ ( t ) Γ θ + ˜ σ > ( t ) ˜ σ ( t ) Γ σ . (65) T aking the deriv ativ e of (65), and substituting (32) and (64), one has ˙ V ( t ) ≤ − ˜ v > ( t ) Q ˜ v ( t ) − 2 α ˜ y > ( t ) P y ˜ y ( t ) − 2 ˜ θ > ( t ) ˙ θ ( t ) Γ θ − 2 ˜ σ > ( t ) ˙ σ ( t ) Γ σ + 2 ˜ y > ( t ) P y C m ¯ B φ ( t ) , (66) where Q q I n is positiv e definite matrix satisfying (20). Notice that kk ˆ x g ( t ) k − k x g ( t ) kk ≤ k ˜ v ( t ) k holds. Then, from (15) and (62) it follows that 2 ˜ y > ( t ) P y C m ¯ B φ ( t ) ≤ α φ ˜ y > ( t ) P y ˜ y ( t ) + m ¯ d 2 ρ x k p P y C m ¯ B k 2 2 α φ k ˜ v ( t ) k 2 2 , (67) where ¯ d ρ x , α φ are giv en in (16) and (28), respectiv ely . Further , from (66) and (67) one has ˙ V ( t ) ≤ − ˜ v > ( t ) Q v ˜ v ( t ) − α y ˜ y > ( t ) P y ˜ y ( t ) − 2 ˜ θ > ( t ) ˙ θ ( t ) Γ θ − 2 ˜ σ > ( t ) ˙ σ ( t ) Γ σ , (68) where Q v = Q − q I n 0 and α y > 0 (see (28)). Notice that from Lemma 3 it follows that for 0 ≤ t ≤ τ 2 ˜ θ > ( t ) ˙ θ ( t ) Γ θ + 2 ˜ σ > ( t ) ˙ σ ( t ) Γ σ ≤ θ 1 − θ 0 Γ λ 1 , 11 and the projection operator in (32) ensures ˜ ω 2 ( t ) Γ ω + ˜ θ > ( t ) ˜ θ ( t ) Γ θ + ˜ σ > ( t ) ˜ σ ( t ) Γ σ ≤ θ 0 Γ , (69) where Γ , θ 0 , θ 1 , λ 1 are given in (45). Since − ˜ v > ( t ) Q v ˜ v ( t ) − α y ˜ y > ( t ) P y ˜ y ( t ) ≤ − λ 1 ( ˜ v > ( t ) P v ˜ v ( t ) + ˜ y > ( t ) P y ˜ y ( t )) , combining (68) - (69), along with (65), leads to ˙ V ( t ) ≤ − λ 1 V ( t ) − θ 1 Γ . Choose t 0 ∈ R to be 0 ≤ t 0 ≤ t ≤ τ . Then, Gronwell-Bellman inequality yields p V ( t ) ≤ υ v ( t, t 0 ) , 0 ≤ t 0 ≤ t ≤ τ , (70) which gives k ˜ v ( t ) k ≤ υ v ( t, t 0 ) p λ min ( P v ) , k ˜ y ( t ) k ≤ υ v ( t, t 0 ) p λ min ( P y ) , (71) where υ v ( t, t 0 ) = s V ( t 0 ) − θ 1 Γ e − λ 1 ( t − t 0 ) + θ 1 Γ . (72) Finally , since V (0) ≤ x > 0 ¯ P v x 0 + θ 0 Γ with ¯ P v = ( I n − H C m ) > P v ( I n − H C m ) , from letting t 0 = 0 it follows that k ˜ y ( t ) k ≤ κ y e − λ 1 2 t k x 0 k + s θ 1 λ min ( P y ) 1 √ Γ , k ˜ v ( t ) k ≤ κ v e − λ 1 2 t k x 0 k + s θ 1 λ min ( P v ) 1 √ Γ , (73) where κ v , κ y are giv en in (21). This completes the proof. Proof of Theorem 2 . Let ˜ x ref ( t ) = x ref ( t ) − x ( t ) , ˜ u ref ( t ) = u ref ( t ) − u ( t ) , ˜ y ref ( t ) = y ref ( t ) − y ( t ) , and ˜ η ref ( t ) = f ( x ref , t ) − f ( x, t ) . First, it will be shown that Equation (47) holds by a contradiction argument. Suppose it is not true. Notice that since κ m ≥ 1 in (21), it follows that γ x 0 > 1 , which leads to ρ dx > ρ 0 , and k ˜ x ref (0) k = ρ 0 < ρ dx , where γ x 0 , ρ dx are giv en in (41), and (43), respectiv ely . Moreov er , since k ˜ u ref (0) k = 0 < ρ du with ρ du being giv en in (43), from the continuity of the solutions it follows that there exists τ 0 > 0 such that k ˜ x ref ( τ 0 ) k = ρ dx or k ˜ u ref ( τ 0 ) k = ρ du , while k ˜ x ref ( t ) k < ρ dx and k ˜ u ref ( t ) k < ρ du for 0 ≤ t < τ 0 . This implies that the following must hold: ˜ x ref τ 0 L ∞ ≤ ρ dx , ˜ u ref τ 0 L ∞ ≤ ρ du . (74) Notice that from (27), (36), and (43) it follows that ρ dx = ρ x − ρ rx , ρ du = ρ u − ρ ru . Then, the triangular inequalities on (74), together with (35) and (37), yield k x τ 0 k L ∞ ≤ ρ x , k u τ 0 k L ∞ ≤ ρ u , (75) which, together with Assumption 3 and the fact that d ρ x ≤ L ρ r , lead to k ˜ η ref ( t ) k ≤ L ρ r k ˜ x ref ( t ) k , 0 ≤ t ≤ τ 0 . (76) Since Equation (75) holds, from Lemma 3, Equation (30) can be rewritten as ˆ η t ( t ) = ω u z ( t ) + ¯ f ( X, t ) + ˜ η t ( t ) + φ ( t ) , (77) where u z ( t ) , ¯ f ( X, t ) , ˜ η t ( t ) , φ ( t ) are given in (10), (13), (61), and (62), respecti vely . Notice that x ( t ) = T g x g ( t ) + T z x f ( t ) , and therefore from (10) and (11) it follows that ω u z ( t ) + ¯ η ( s ) = Z ( s )( ω u ( s ) + η ( s )) , (78) where ¯ η ( s ) , η ( s ) are the Laplace transforms of ¯ f ( X, t ) and f ( x, t ) , respecti vely . Now , substituting (77) and (78) into (29) leads to u ( s ) = C 0 ( s )( K g r ( s ) − η ( s )) − φ c ( s ) , φ c ( s ) = C 0 ( s ) Z − 1 ( s )( ˜ η t ( s ) + φ ( s )) , (79) where C 0 ( s ) is given in (22); C 0 ( s ) Z − 1 ( s ) is a stable and strictly proper transfer matrix. Combining the Laplace trans- form of (9) with (79) yields x ( s ) = H r ( s ) r ( s ) + G ( s ) η ( s ) − ωH 0 ( s ) φ c ( s ) + x in ( s ) , y ( s ) = C m x ( s ) , (80) where H r ( s ) , H 0 ( s ) , G ( s ) are gi ven in (25), and x in ( s ) = ( s I n − A m ) − 1 x 0 . By subtracting (79) and (80) from (40), it follows that ˜ x ref ( s ) = G ( s ) ˜ η ref ( s ) + ω H 0 ( s ) φ c ( s ) − x in ( s ) , ˜ y ref ( s ) = C m ˜ x ref ( s ) , (81) and ˜ u ref ( s ) = − C 0 ( s ) ˜ η ref ( s ) + φ c ( s ) . (82) Since ( C m B m ) † ( C m B m ) = I m , from (64) one has φ c ( s ) = C 1 ( s ) ˜ y ( s ) − C 2 ( s ) ˜ v ( s ) , (83) where { C 1 ( s ) , C 2 ( s ) } , and { ˜ y ( t ) , ˜ v ( t ) } are defined in (26), and (63), respectiv ely; C 1 ( s ) , C 2 ( s ) are all stable and proper transfer function matrices. From (23) it can be shown that k G ( s ) k L 1 L ρ r < 1 . Therefore, combining (76), and (81)-(83) yields ˜ x ref τ 0 L ∞ ≤ k H 1 ( s ) k L 1 k ˜ y τ 0 k L ∞ + k H 2 ( s ) k L 1 k ˜ v τ 0 k L ∞ 1 − k G ( s ) k L 1 L ρ r + κ m ρ 0 1 − k G ( s ) k L 1 L ρ r , ˜ u ref τ 0 L ∞ ≤ k C 1 ( s ) k L 1 k ˜ y τ 0 k L ∞ + k C 2 ( s ) k L 1 k ˜ v τ 0 k L ∞ + k C 0 ( s ) k L 1 L ρ r ˜ x ref τ 0 L ∞ , where κ m , { H 1 ( s ) , H 2 ( s ) } , { C 1 ( s ) , C 2 ( s ) } are given in (21), (25), and (26), respectiv ely . Since Equation (73) holds for 0 ≤ t ≤ τ 0 , one has ˜ u ref τ 0 L ∞ ≤ γ u 0 ρ 0 + γ u r θ 1 Γ , ˜ x ref τ 0 L ∞ ≤ γ x 0 ρ 0 + γ x r θ 1 Γ , (84) 12 where γ u 0 , γ x 0 , γ u , γ x are giv en in (41), and θ 1 is defined in (45). Since Γ > 0 is chosen so that γ x q θ 1 Γ < ¯ γ and γ u q θ 1 Γ < ¯ γ , from (84) it follows that ˜ u ref τ 0 L ∞ < ρ dx , ˜ x ref τ 0 L ∞ < ρ du , which contradict (74), thus proving (47). Moreover , Equation (48) is obtained from applying the triangular inequality on k ˜ x ref k and k ˜ u ref k . Nest we prove Equation (49). Let A b ∈ R n b × n b , B b ∈ R n b × m , and C b ∈ R m × m be a minimal realization of C ( s ) with the appropriate dimension n b . Then, the system giv en in (81) and (82) can be represented as ˙ ˜ x c ( t ) = A c ˜ x c ( t ) + B c ˜ η ref ( t ) + ¯ B c ω φ c ( t ) , ˜ x ref ( t ) = C c ˜ x c ( t ) , ˜ x c (0) = [ − x > 0 , 0] > , (85) with A c = A m B m C b 0 A b , B c = B m − B b , ¯ B c = B m 0 , C c = I n 0 , where ˜ x c ( t ) = [ ˜ x > ref ( t ) , ˜ x > b ( t )] > ∈ R n c × n c is the state vector with n c = n + n b . Let t m ≥ 0 . Then, from (85) it follows that for t ≥ t m ˜ x c ( t ) = e A c ( t − t m ) ˜ x c ( t m ) + Z t t m e A c ( t − τ ) ¯ B c ω φ c ( τ ) dτ + Z t t m e A c ( t − τ ) B c ˜ η ref ( τ ) dτ . (86) Notice that it can be sho wn that G ( s ) = C c ( s I n c − A c ) − 1 B c = H 0 ( s )( I m − C ( s )) . Since k G ( s ) k L 1 L ρ r < 1 holds from (23), from the continuity of the L 1 -norm, one may take a suf ficiently small λ 0 > 0 such that β 1 = k G ( s − λ 0 ) k L 1 < 1 /L ρ r . Let A λ 0 = A c + λ 0 I n c , and define ¯ x c ( t ) = e λ 0 ( t − t m ) ˜ x c ( t ) , ¯ φ c ( t ) = ω e λ 0 ( t − t m ) φ c ( t ) , ¯ x ref ( t ) = e λ 0 ( t − t m ) ˜ x ref ( t ) , and ¯ η ref ( t ) = e λ 0 ( t − t m ) ˜ η ref ( t ) . Since Assumption 3 implies that k ¯ η ref ( t ) k ≤ L ρ r k ¯ x ref ( t ) k , (87) multiplying both sides of (86) by e λ 0 ( t − t m ) C c leads to k ¯ x ref k L ∞ [ t m ,t ] ≤ β 0 1 − β 1 L ρ r k ˜ x c ( t m ) k + β 2 1 − β 1 L ρ r ¯ φ c L ∞ [ t m ,t ] , (88) where β 0 = sup 0 ≤ τ k e A λ 0 τ k , β 1 = k G ( s − λ 0 ) k L 1 , and β 2 = ( s I n c − A λ 0 ) − 1 ¯ B c L 1 . By combining (86) - (88), it can be shown that k ¯ x c ( t ) k ≤ κ 0 k ˜ x c ( t m ) k + κ 1 ¯ φ c L ∞ [ t m ,t ] , which further gives k ˜ x c ( t ) k ≤ κ 0 e − λ 0 ( t − t m ) k ˜ x c ( t m ) k + ω u κ 1 k φ c k L ∞ [ t m ,t ] , (89) where ω u > 0 is the upper bound of ω , and κ 0 = β 0 (1 + L ρ r β 3 1 − β 1 L ρ r ) , κ 1 = β 2 (1 + L ρ r β 3 1 − β 1 L ρ r ) , (90) with β 3 = ( s I n c − A λ 0 ) − 1 B c L 1 . Substituting (83), together with (70) - (72), into (89) leads to k ˜ x c ( t ) k ≤ κ 0 e − λ 0 ( t − t m ) k ˜ x c ( t m ) k + γ 1 υ v ( t m , 0) + r θ 1 Γ ! , (91) where υ v ( · , · ) , θ 1 are defined in (72), and (45), respectiv ely , and γ 1 = ω u κ 1 k C 1 ( s ) k L 1 p λ min ( P y ) + k C 2 ( s ) k L 1 p λ min ( P v ) ! . Notice that from (45) and (72) it follows that υ ( t m , 0) ≤ q nλ max ( ¯ P v ) k x 0 k + r θ 1 Γ , which, together with (91), results in k ˜ x c ( t m ) k ≤ κ 0 e − λ 0 t m k x 0 k + γ 1 q nλ max ( ¯ P v ) k x 0 k + γ 1 r θ 1 Γ , (92) where ¯ P v = ( I n − H C m ) > P v ( I n − H C m ) . Let t m = t/ 2 . Then, substituting (92) into (91), and using (72), one has k ˜ x ref ( t ) k ≤ k ˜ x c ( t ) k ≤ υ dx ( t ) k x 0 k + γ dx √ Γ , t ≥ 0 , where υ dx ( t ) = κ 2 0 e − λ 0 t + κ 0 γ 1 q nλ max ( ¯ P v ) e − λ 0 2 t + γ 1 q nλ max ( ¯ P v ) e − λ 1 4 t , γ dx =( κ 0 + 2) γ 1 p θ 1 , with λ 1 being given in (45). Finally , letting γ dy = k C m k γ dx , υ dy ( t ) = k C m k υ dx ( t ) reduces to (49). This completes the proof.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment