불안정 무한 차원 시스템의 샘플링 데이터 출력 조절: 상수 기준 및 교란 신호에 대한 해법
본 논문은 불안정한 웰포즈드(infinite‑dimensional) 시스템에 대해, 상수 기준 및 교란 신호를 정확히 추적·제거하는 샘플링 데이터 디지털 컨트롤러 설계 방법을 제시한다. 연속‑시간 시스템을 샘플링‑홀드와 일반화 샘플러로 연결한 뒤, 이산‑시간 형태로 변환한 뒤 내부 모델 원리를 이용해 유한 차원의 디지털 제어기를 설계한다. 핵심은 Nevanlinna‑Pick 보간 문제를 내부·경계 조건과 함께 푸는 것이며, 이를 통해 충분조건을…
저자: Masashi Wakaiki, Hideki Sano
본 논문은 “불안정 웰포즈드 무한 차원 시스템의 샘플링 데이터 출력 조절”이라는 문제를 다루며, 상수 기준(reference) 및 교란(disturbance) 신호를 정확히 추적·제거하는 유한 차원의 디지털 컨트롤러 설계 방법을 제시한다.
**1. 연구 배경 및 목적**
디지털 컨트롤러는 연속‑시간 플랜트를 샘플링‑홀드와 샘플러를 통해 샘플링 데이터 시스템으로 구현된다. 무한 차원 시스템(예: PDE, 지연 미분 방정식)은 제어와 관측 연산자가 비유한(unbounded)일 수 있어 웰포즈드(Well‑posed) 프레임워크가 필요하다. 기존 연구는 주로 안정 시스템에 초점을 맞추었으며, 불안정 시스템에 대해서는 저이득 설계가 불가능하고, 기존 내부 모델 기반 설계가 복잡했다. 따라서 저자는 불안정 웰포즈드 시스템에 대해 샘플링 데이터 형태로 출력 조절을 수행할 수 있는 충분조건을 찾고, 실제 설계 절차를 제공한다.
**2. 시스템 모델링**
연속‑시간 웰포즈드 시스템 Σ는 (A,B,C)와 전이함수 G(s)로 정의된다. A는 강연속 반감소 반감소 반감도(semigroup) T_t의 생성자이며, B와 C는 각각 입력·출력 연산자이다. 입력 u와 출력 y는 각각 제로‑오더 홀드 H_τ와 가중 평균 샘플러 S_τ( weight w∈L²(0,τ) )를 통해 디지털 컨트롤러 Σ_d와 연결된다. 샘플링 주기 τ>0이며, w는 ∫₀^τ w(t)dt=1을 만족한다.
**3. 목표 정의**
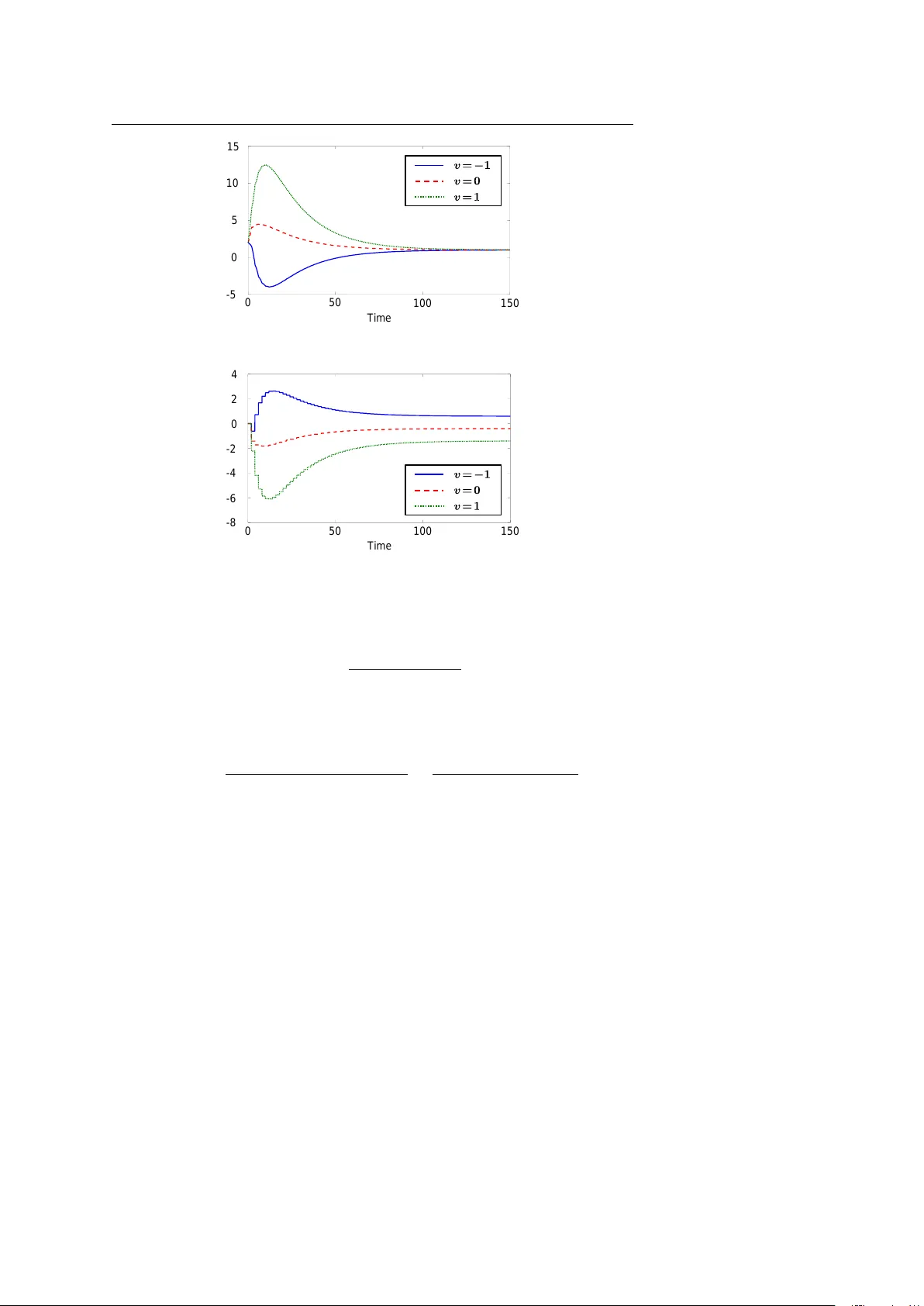
목표는 두 가지이다. (i) 폐루프 시스템이 지수적으로 안정(즉, L²_α‑norm에서 에너지 수렴)하도록 설계하고, (ii) 상수 기준 y_ref와 교란 v에 대해 출력 y(t)−y_ref가 L²_α‑norm에서 0으로 수렴하도록 한다. 여기서 L²_α는 e^{−αt} 가중을 적용한 L² 공간이며, α<0을 선택한다.
**4. 이산‑시간 변환 및 내부 모델 원리**
연속‑시간 시스템을 샘플링‑홀드와 샘플러를 통해 이산‑시간 시스템 (A_d,B_d,C_d,D_d) 로 변환한다. 이후 내부 모델 원리를 적용한다. 외부 신호는 상수이므로, 외부 시스템 S=diag(e^{iθ₁},…,e^{iθ_n})는 θ_ℓ=0인 경우만 포함한다. 내부 모델은 디지털 컨트롤러 상태 행렬 P에 “p‑copy” 형태로 삽입되며, 이는 “ker(e^{iθ_ℓ}I−P) 차원 ≥ p” 조건으로 표현된다.
**5. 설계 절차**
설계는 두 단계로 나뉜다.
① **안정화 설계**: H∞ 공간에서 자유 파라미터 Q(z)∈H∞(E₁,ℂ^{p×p})를 도입하고, 코프라이트 분해와 함께 (A_d+B_dQ(z)R(z), …) 형태의 폐루프 시스템을 안정화한다. 이 단계는 기존 연구
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기