Sampled-data Output Regulation of Unstable Well-posed Infinite-dimensional Systems with Constant Reference and Disturbance Signals
We study the sample-data control problem of output tracking and disturbance rejection for unstable well-posed linear infinite-dimensional systems with constant reference and disturbance signals. We obtain a sufficient condition for the existence of f…
Authors: Masashi Wakaiki, Hideki Sano
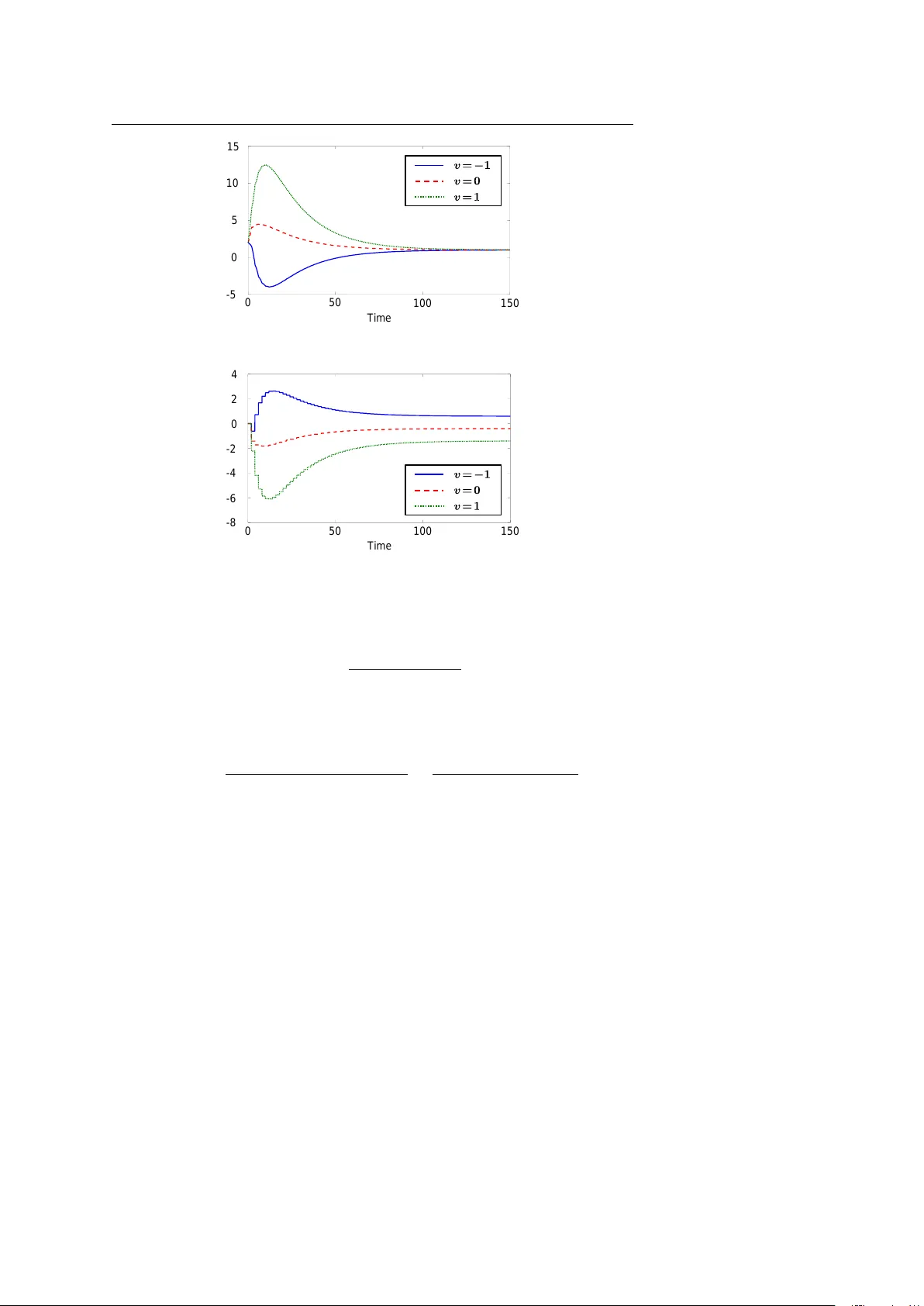
Noname man uscript No. (will b e inserted b y the editor) Sampled-data Output Regulation of Unstable W ell-p osed Infinite-dimensional Systems with Constan t Reference and Disturbance Signals Masashi W ak aiki · Hideki Sano Received: date / Accepted: date Abstract W e study the sample-data control problem of output tracking and disturbance rejection for unstable w ell-p osed linear infinite-dimensional sys- tems with constant reference and disturbance signals. W e obtain a sufficient condition for the existence of finite-dimensional sampled-data controllers that are solutions of this control problem. T o this end, w e study the problem of output tracking and disturbance rejection for infinite-dimensional discrete- time systems and propose a design metho d of finite-dimensional controllers b y using a solution of the Nev anlinna-Pic k interpolation problem with b oth in terior and b oundary conditions. W e apply our results to systems with state and output dela ys. Keyw ords F requency-domain metho ds · Output regulation · Sampled-data con trol · State-space metho ds · W ell-p osed infinite-dimensional systems Mathematics Sub ject Classification (2010) 93B52 · 93C05 · 93C25 · 93C35 · 93C57 · 93D15 This w ork w as supported b y JSPS KAKENHI Grant Num bers JP17K14699. M. W ak aiki Graduate School of System Informatics, Kob e University , Nada, Kob e, Hy ogo 657-8501, Japan T el.: +8178-803-6232 F ax: +8178-803-6392 E-mail: wak aiki@ruby .kobe-u.ac.jp H. Sano Graduate School of System Informatics, Kob e University , Nada, Kob e, Hy ogo 657-8501, Japan T el.: +8178-803-6380 F ax: +8178-803-6392 E-mail: sano@crystal.kobe-u.ac.jp 2 Masashi W ak aiki, Hideki Sano 1 Introduction Due to the developmen t of computer technology , digital con trollers are com- monly implemented for con tinuous-time plants. W e call such closed-lo op sys- tems sample d-data systems . In addition to their practical motiv ation, sampled- data systems yield theoretically in teresting problems related to the com bina- tion of b oth contin uous-time and discrete-time dynamics, and v arious tech- niques such as the lifting approac h [ 5 , 52 , 54 ] and the frequency resp onse op er- ator approac h [ 1 , 15 ] ha ve been also dev elop ed for the analysis and syn thesis of sampled-data finite-dimensional systems. Sampled-data con trol theory for infinite-dimensional systems has b een dev elop ed, e.g., in [ 18 – 20 , 25 – 28 , 37 – 39 , 43 ]. Sev eral specifically relev an t studies will be cited b elow again. In this pap er, we study the problem of sampled-data output regulation for unsta- ble w ell-p osed systems. The main ob jective in our con trol problem is to find finite-dimensional digital controllers achieving the output tracking of given constan t reference signals in the presence of external constant disturbances. A theory for well-posed systems has b een extensively developed; see, e.g., the surv ey [ 45 , 50 ] and the b o ok [ 44 ]. W ell-posed systems allow un b ounded con trol and observ ation op erators and pro vide a framework to form ulate control prob- lems for systems gov erned by partial differential equations with p oint control and observ ation and by functional differential equations with delays in the state, input, and output v ariables. Our output regulation metho d is based on the internal mo del principle, whic h was originally developed for finite-dimensional systems in [ 12 ] and was later generalized for infinite-dimensional systems with finite-dimensional and infinite-dimensional exosystems in [ 33 – 36 , 53 ] and references therein. In par- ticular, output regulation of nonsmooth p erio dic signals has b een extensively studied as r ep etitive c ontr ol [ 17 ]. F or regular systems, which is a sub class of w ell-p osed systems, the authors of [ 7 , 31 , 33 , 51 ] hav e provided design metho ds of contin uous-time controllers for robust output regulation. F or stable well- p osed systems with finite-dimensional exosystems, low-gain controllers sug- gested b y the internal mo del principle hav e b een constructed for the contin uous- time setup in [ 29 , 40 ] and for the sampled-data setup in [ 18 – 20 , 28 ]. The dif- ficult y of the problem we consider arises from the instability of well-posed systems. If the system is unstable, then low-gain con trollers cannot achiev e closed-lo op stability . Uk ai and Iwazumi [ 46 ] ha ve dev elop ed a state-space- based design metho d of finite-dimensional con trollers for output regulation of unstable contin uous-time infinite-dimensional systems, by using residue mo de filters prop osed in [ 42 ]. On the other hand, we employ a frequency-domain tec hnique based on coprime factorizations as in [ 16 , 22 , 23 , 28 , 29 ]. In particu- lar, we extend a design metho d of stabilizing sampled-data controllers in [ 25 ] to output regulation. Let ( A, B , C ) and G b e generating op erators and a transfer function of a w ell-p osed system Σ , resp ectiv ely . The op erator A is the generator of a strongly con tinuous semigroup T , which go verns the dynamics of the system without con trol. The op erators B and C are con trol and observ ation op erators, Sampled-data Output Regulation of Unstable W ell-p osed Systems 3 resp ectiv ely . W e consider only infinite-dimensional systems that has finite- dimensional input and output spaces with the same dimension. In other w ords, the transfer function G is a square-matrix-v alued function. The w ell-p osed system is connected with a discrete-time linear time-in v ariant controller Σ d through a zero-order hold H τ and a generalized sampler S τ , where τ > 0 is a sampling p erio d. Let u, y be the input and output of the well-posed system Σ and u d , y d b e the input and output of the digital con troller Σ d , respectively . The generalized sampler S τ is written as ( S τ y )( k ) = Z τ 0 w ( t ) y ( k τ + t ) dt ∀ k ∈ Z + , where the s calar weigh ting function w b elongs to L 2 (0 , τ ) and satisfies R τ 0 w ( t ) dt = 1. In w ell-p osed systems, the output y is in L 2 loc , and hence the ideal sampling, i.e., p oint ev aluation does not mak e sense. The weigh ting function w should b e c hosen so that the sampled-data system is detectable. Using the zero-order hold H τ and the generalized sampler S τ , we consider the sampled-data feedbac k of the form u = H τ y d + v 1 R + u d = y ref 1 Z + − S τ y , where v 1 R + and y ref 1 Z + are constant external reference and disturbance sig- nals, respectively . Fig. 1 illustrates the sampled-data system w e study . Since the output y of w ell-p osed systems b elongs to L 2 loc , the output y is not guar- an teed to con verge to y ref as t → ∞ . In this pap er, w e therefore consider the con vergence of the output in the “energy” sense, i.e., there exist constan ts Γ ref > 0 and α < 0 such that k y − y ref 1 R + k L 2 α ≤ Γ ref x (0) x d (0) X × X d + k v k C p + k y ref k C p ! for all initial states x (0) ∈ X of Σ and x d (0) ∈ X d of Σ d and all v , y ref ∈ C p , where L 2 α is the L 2 -space w eighted by the exp onential function e − αt . The ab o ve condition means that as t → ∞ , the “energy” of the restricted tracking error ( y − y ref ) | [ t, ∞ ) exp onen tially conv erges to zero. If we embed a smo othing precomp ensator betw een the plan t and the zero-order hold as proposed in [ 25 ], then the output y exp onentially conv erges to y ref in the usual sense under a certain regularit y assumption on initial states. Before studying the sampled-data output regulation problem, w e inv esti- gate an output regulation problem for infinite-dimensional discrete-time sys- tems. In the discrete-time setup, we prop ose a design metho d of finite-dimensional con trollers that achiev e output regulation. Although in the sampled-data setup, w e consider only constant reference and disturbance signals, the prop osed metho d in the discrete-time setup allows reference and disturbance signals that are finite sup erp ositions of sinusoids. The construction of regulating con- trollers consists of t wo steps: First we design stabilizing controllers with a free parameter in H ∞ , using the tec hniques developed in [ 24 , 25 ]. Next we c ho ose 4 Masashi W ak aiki, Hideki Sano - Fig. 1 Sampled-data system. the free parameter so that the controller incorp orates an internal mo del for out- put regulation. The design problem of regulating con trollers is reduced to the Nev anlinna-Pick interpolation problem with b oth interior and boundary con- ditions. In the reduced interpolation problem, interior conditions are required for stabilization, whereas b oundary conditions arise from output trac king and disturbance rejection. Our main result, Theorem 3.10 , states that there exists a finite-dimensional digital con troller that achiev es output regulation for constant reference and disturbance signals if the follo wing conditions are satisfied: (i) The resolven t set of A contains 0. (ii) det G (0) 6 = 0. (iii) The unstable part of the sp ectrum of A consists of finitely man y eigen v alues with finite m ultiplicities. (iv) The semigroup generated by the stable part of A is exp onentially stable. (v) The unstable part of ( A, B , C ) is controllable and observ able. (vi) F or every nonzero integer ` , 2 `π i/τ do es not b elong to the sp ectrum of A . (vii) F or ev ery unstable eigenv alues λ of A , R τ 0 w ( t ) e λt dt 6 = 0. (viii) F or every unstable eigenv alues λ, µ of A and nonzero integer ` , τ ( λ − µ ) 6 = 2 `π i . (ix) The multiplicities of all unstable eigenv alues of A are one. The assumptions (iii)– (viii) are used for sampled-data stabilization in [ 25 ]. In fact, (iii)–(vii) are sufficien t for the existence of sampled-data stabilizing con trollers, and further, (iii)–(viii) are necessary and sufficient in the single- input and single-output case. In particular, (v)–(viii) is used to guaran tee that the unstable part of the sampled-data system is con trollable and observ able. W e place the assumptions (i) and (ii) for output regulation. The remaining assumption (ix) is used to reduce the design problem of stabilizing controllers to an interpolation problem of functions in the H ∞ -space. In the multi-input and multi-output case, the assumption (ix) makes it easy to obtain the as- so ciated interpolation conditions. W e can remo ve (ix) in the single-input and single-output case. The pap er is structured as follows. In Section 2, we study an output regu- lation problem for infinite-dimensional discrete-time systems. In Section 3, w e obtain a sufficient condition for the existence of finite-dimensional sampled- data regulating con trollers for unstable well-posed systems with constan t refer- Sampled-data Output Regulation of Unstable W ell-p osed Systems 5 ence and disturbance signals. In Section 4, w e illustrate our results by applying them to systems with state and output delays. Notation and terminolo gy W e denote by Z + and R + the set of nonnegative integers and the set of nonnegativ e real num b ers, resp ectively . F or α ∈ R , w e define C α := { s ∈ C : Re s > α } , and for η > 0, E η := { z ∈ C : | z | > η } . W e also define D := { z ∈ C : | z | < 1 } and T := { z ∈ C : | z | = 1 } . F or a set Ω ⊂ C , its closure is denoted b y cl( Ω ). F or an arbitrary set Ω 0 , the indicator function of Ω ⊂ Ω 0 is denoted b y 1 Ω . F or a matrix M ∈ C p × m , let us denote by M ∗ , M , and M adj the conjugate transp ose, the matrix with complex conjugate entries, and the adjugate matrix of M , resp ectively . Let X and Y b e Banach spaces. Let L ( X , Y ) denote the space of all b ounded linear op erators from X to Y . W e set L ( X ) := L ( X , X ). An op- erator T ∈ L ( X ) is said to b e p ower stable if there exist Γ ≥ 1 and ρ ∈ (0 , 1) suc h that k T k k L ( X ) ≤ Γ ρ k for ev ery k ∈ Z + . Let T = ( T t ) t ≥ 0 b e a strongly con tinuous semigroup on X . The exp onential gro wth bound of T is denoted by ω ( T ), that is, ω ( T ) := lim t →∞ ln k T t k /t . W e say that the strongly contin uous semigroup T is exp onential ly stable if ω ( T ) < 0. F or a linear op erator A from X to Y , let dom( A ) denote the domain of A . The sp ectrum and resolven t set of a linear op erator A : dom( A ) ⊂ X → X are denoted b y σ ( A ) and % ( A ), resp ectiv ely . F or α ∈ R , w e define the w eigh ted L 2 -space L 2 α ( R + , X ) by L 2 α ( R + , X ) := { f : R + → X : e − α f ∈ L 2 ( R + , X ) } , where e − α ( t ) := e − αt for t ∈ R + , with the norm k f k L 2 α := k e − α f k L 2 . The space of all functions from Z + to X is denoted b y F ( Z + , X ). Set f 5 ( k ) := f ( k + 1) for every k ∈ Z + and ev ery f ∈ F ( Z + , X ). Let Ω = C α , Ω = E η , or Ω = D . Let H ∞ ( Ω , C p × m ) denote the space of all b ounded holomorphic functions from Ω to C p × m . The norm of H ∞ ( Ω , C p × m ) is giv en by k Φ k ∞ := sup s ∈ Ω k Φ ( s ) k . W e write H ∞ ( Ω ) for H ∞ ( Ω , C ). 2 Discrete-time output regulation In this section, we construct finite-dimensional controllers for the robust out- put regulation of infinite-dimensional discrete-time systems. Before proceeding to technical details, we describ e the ov erview of this section. A fundamen- tal assumption throughout this pap er is that an infinite-dimensional plant can b e decomp osed into a finite-dimensional unstable part and an infinite- dimensional stable part. T o av oid spill-o ver effects [ 3 ], w e cannot ignore the infinite-dimensional stable part completely in the design of stabilizing con- trollers. How ever, it has b een shown in [ 24 , 25 ] that if the infinite-dimensional stable part is appropriately approximated b y a finite-dimensional stable sys- tem, then we can design finite-dimensional stabilizing con trollers. Now one ma y ask the following question for the problem of output regulation: 6 Masashi W ak aiki, Hideki Sano By such an appr oximation-b ase d metho d, c an we always c onstruct sta- bilizing c ontr ol lers that inc orp or ate an internal mo del? T o stabilize the plan t, the appro ximation error should be small. How ever, it is p ossible that if the approximation error is smaller than a certain threshold, then w e cannot design stabilizing con trollers with in ternal models by using the finite-dimensional appro ximating system. W e will sho w that such a situation do es not o ccur under certain assumptions on the plant. The pro of is based on t wo k ey facts: First, con trollers incorp orate internal mo dels if and only if their free parameters in H ∞ ( E 1 , C p × p ) satisfy certain interpolation conditions on the boundary T . Second, the boundary Nev anlinna-Pick interpolation problem (see Problem A.7 in the app endix for details) is alwa ys solv able. In Section 2.1 , we formulate the problem of robust output regulation and recall the concept of p -copy in ternal models. In Section 2.2 , we introduce as- sumptions of the plan t and provide the main result of this section, Theorem 2.5 . W e pro vide the proof of this theorem in Sections 2.3 and 2.4 . In particular, Sections 2.3 is dev oted to preliminary lemmas for the multi-input and the m ulti-output case. Section 2.3 ma y be skipped by the readers interested only in the single-input and single-output case. 2.1 Con trol ob jective In this section, w e consider the follo wing infinite-dimensional discrete-time system: x 5 ( k ) = Ax ( k ) + B u ( k ) , x (0) = x 0 ∈ X (2.1a) y ( k ) = C x ( k ) + D u ( k ) , (2.1b) where the state space X is a separable complex Hilb ert space, A ∈ L ( X ), B ∈ L ( C p , X ), C ∈ L ( X , C p ), and D ∈ C p × p . W e use a strictly causal controller x 5 d ( k ) = P x d ( k ) + Qu d ( k ) , x d (0) = x 0 d ∈ X d (2.2a) y d ( k ) = Rx d ( k ) , (2.2b) where the state space X d is a complex Hilbert space, P ∈ L ( X d ), Q ∈ L ( C p , X d ), and R ∈ L ( X d , C p ). The control ob jective is that the output y trac ks a giv en reference signal y ref in the presence of an external disturbance signal v . The reference and disturbance signals y ref and v are assumed to b e generated b y an exosystem of the form ξ 5 ( k ) = S ξ ( k ) , ξ (0) = ξ 0 ∈ C n (2.3a) v ( k ) = E ξ ( k ) (2.3b) y ref ( k ) = F ξ ( k ) , (2.3c) where E ∈ C p × n , F ∈ C p × n , and S := diag e iθ 1 , . . . , e iθ n with θ 1 , . . . , θ n ∈ [0 , 2 π ) distinct . Sampled-data Output Regulation of Unstable W ell-p osed Systems 7 The input u of the plan t and the input u d of the con troller are given by u ( k ) = y d ( k ) + v ( k ) , u d ( k ) = y ref ( k ) − y ( k ) =: e ( k ) . W e can write the dynamics of the closed-lo op system as x 5 e ( k ) = A e x e ( k ) + B e ξ ( k ) , x e (0) = x 0 e (2.4a) e ( k ) = C e x e ( k ) + D e ξ ( k ) , (2.4b) where x e ( k ) = x ( k ) x d ( k ) , x 0 e = x 0 x 0 d , and A e := A B R − QC P − QD R , B e := B E Q ( F − D E ) (2.5a) C e := − C D R , D e := F − D E . (2.5b) F or the con troller in ( 2.2 ) represented by the op erators ( P , Q, R ), we con- sider a set of perturb ed plants and exosystems O ( P , Q, R ) defined as follo ws. Definition 2.1 (Set of p erturb ed plan ts and exosystems) F or given op er ators P ∈ L ( X d ) , Q ∈ L ( C p , X d ) , and R ∈ L ( X d , C p ) , O ( P , Q, R ) is the set of al l ( e A, e B , e C , e D , e E , e F ) satisfying the fol lowing two c onditions: 1. e A ∈ L ( X ) , e B ∈ L ( C p , X ) , e C ∈ L ( X , C p ) , e D ∈ C p × p , e E ∈ C p × n , and e F ∈ C p × n . 2. The p erturb e d op er ator e A e define d by e A e := " e A e B R − Q e C P − Q e D R # is p ower stable. If A e is p ow er stable, the conditions ab ov e are satisfied for any bounded p erturbations of sufficien tly small norms. In this section, w e study a robust output regulation problem. Problem 2.2 (Robust output regulation for discrete-time systems) Given the plant ( 2.1 ) and the exosystem ( 2.3 ) , find a c ontr ol ler ( 2.2 ) satisfying the fol lowing pr op erties: Stability: The op er ator A e is p ower stable. T r acking: Ther e exist M e > 0 and ρ e ∈ (0 , 1) such that for every initial state x 0 ∈ X , x 0 d ∈ X d , and ξ 0 ∈ C n , the tr acking err or e satisfies k e ( k ) k C p ≤ M e ρ k e x 0 x 0 d X × X d + k ξ 0 k C n ! ∀ k ∈ Z + . R obustness: If the op er ators ( A, B , C, D, E , F ) ar e change d to ( e A, e B , e C , e D , e E , e F ) ∈ O ( P , Q, R ) , then the ab ove tr acking c ondition stil l holds. 8 Masashi W ak aiki, Hideki Sano Before pro ceeding to the construction of finite-dimensional regulating con- trollers, we recall the internal model principle. In [ 35 ], a p -copy in ternal mo del has been in troduced for con tinuous-time systems. The discrete-time coun ter- part has app eared in Section IV.B of [ 34 ]. Definition 2.3 (Definition 6.1 in [ 35 ]) A c ontr ol ler ( 2.2 ) is said to inc or- p or ate a p -c opy internal mo del of the exosystem ( 2.3 ) if dim ker( e iθ ` I − P ) ≥ p ∀ ` ∈ { 1 , . . . , n } . (2.6) Theorem 2.4 (Theorem IV.5 in [ 34 ]) Supp ose that A e is p ower stable. The c ontr ol ler ( 2.2 ) inc orp or ates a p -c opy internal mo del of the exosystem ( 2.3 ) if and only if it is a solution of Pr oblem 2.2 . 2.2 Output regulation b y a finite-dimensional controller Throughout this section, w e imp ose the following assumptions: h a1 i e iθ ` ∈ % ( A ) for ev ery ` ∈ { 1 , . . . , n } . h a2 i det G ( e iθ ` ) 6 = 0 for ev ery ` ∈ { 1 , . . . , n } . h a3 i There exist subspaces X + and X − of X suc h that dim X + < ∞ and X = X + ⊕ X − . h a4 i AX + ⊂ X + and AX − ⊂ X − . Let us denote the pro jection op erator from X to X + b y Π , and defin e A + := A | X + , B + := Π B , C + := C | X + A − := A | X − , B − := ( I − Π ) B , C − := C | X − . W e place the remaining assumptions. h a5 i σ ( A ) ∩ cl( E 1 ) consists of finitely many eigenv alues with finite algebraic m ultiplicities, σ ( A + ) = σ ( A ) ∩ cl( E 1 ), and there exists η 0 ∈ (0 , 1) such that σ ( A − ) = σ ( A ) ∩ C \ cl( E η 0 ) . h a6 i ( A + , B + , C + ) is con trollable and observ able. h a7 i The zeros of det( z I − A + ) are simple. W e place the assumptions h a 1 i and h a 2 i for robust output regulation. The assumptions h a 3 i – h a 6 i are used for stabilization of infinite-dimensional discrete-time systems; see, e.g., [ 24 ]. W e will show in Lemma 2.7 below that the assumption h a 7 i guarantees that dim ker( λI − A + ) = 1 for ev ery λ ∈ C satisfy- ing det( λI − A + ) = 0. This allo ws us to reduce the design problem of stabilizing con trollers to the problem of finding functions in H ∞ ( E 1 , C p × p ) that satisfy el- emen tary interpolation conditions, which will be sho wn in Lemma 2.10 . In the single-input and single-output case p = 1, we can remo v e h a 7 i as mentioned at the end of this section. This is b ecause it is muc h easier to translate stabi- lization in to interpolation in the scalar-v alued case than in the matrix-v alued case. Sampled-data Output Regulation of Unstable W ell-p osed Systems 9 Under h a 4 i and h a 5 i , w e fix η ∈ ( η 0 , 1) and define the transfer function G of the plan t ( 2.1 ) by G ( z ) := C ( z I − A ) − 1 B + D ∀ z ∈ E η ∩ % ( A ) . W e can decomp ose G into G ( z ) = G + ( z ) + G − ( z ) ∀ z ∈ E η ∩ % ( A ) , where G + ( z ) := C + ( z I − A + ) − 1 B + , G − ( z ) := C − ( z I − A − ) − 1 B − + D (2.7) and G − ∈ H ∞ ( E η , C p × p ). By h a 6 i , the unstable part G + of the plant has no unstable p ole-zero cancellations. There exist N + , D + with rational entries in H ∞ ( E 1 , C p × p ) suc h that G + = D − 1 + N + and N + , D + are left coprime ov er the sets of rational functions in H ∞ ( E 1 , C p × p ). Cho ose such N + , D + arbitrarily , and let χ 1 , . . . , χ Υ b e the zeros of det D + in cl( E 1 ). T ogether with h a 6 i and h a 7 i , Lemma A.7.39 of [ 10 ] shows that these zeros are equal to the eigen v alues of A + and that the orders of the zeros are one. The ob jective of this section is to prov e the follo wing theorem construc- tiv ely: Theorem 2.5 Assume that h a 1 i – h a 7 i hold. Ther e exists a finite-dimensional c ontr ol ler ( 2.2 ) that is a solution of the r obust output r e gulation pr oblem, Pr ob- lem 2.2 . 2.3 Preliminary lemmas Before pro ceeding to the pro of of Theorem 2.5 , we show three preliminary results, all of which are used for the multi-input and multi-output case p > 1. Hence the readers who are interested only in the single-input and single-output case p = 1 can skip this subsection. The first lemma provides an upp er b ound on the norm of inv erse matrices. Lemma 2.6 L et V , W ∈ C p × p . If V is invertible and if k V − 1 k C p × p · k V − W k C p × p < 1 , then W is also invertible and k W − 1 k C p × p ≤ k V − 1 k C p × p 1 − k V − 1 k C p × p · k V − W k C p × p . (2.8) 10 Masashi W ak aiki, Hideki Sano Pr o of Since k I − V − 1 W k C p × p ≤ k V − 1 k C p × p · k V − W k C p × p < 1 , it follo ws that V − 1 W and hence W are inv ertible. Using the iden tity V − 1 − W − 1 = V − 1 ( W − V ) W − 1 , w e obtain k V − 1 − W − 1 k C p × p ≤ k V − 1 k C p × p · k V − W k C p × p · k W − 1 k C p × p . This yields k W − 1 k C p × p ≤ k V − 1 k C p × p + k V − 1 − W − 1 k C p × p ≤ k V − 1 k C p × p + k V − 1 k C p × p · k V − W k C p × p · k W − 1 k C p × p . Th us, we obtain the desired inequality ( 2.8 ). u t The second preliminary result c haracterizes adjugate matrices. Lemma 2.7 F or a r e gion Ω ⊂ C , c onsider a holomorphic function ∆ : Ω → C p × p . Supp ose that z 0 ∈ Ω is a simple zer o of det ∆ . Then dim k er ∆ ( z 0 ) = 1 . F urthermor e, if a nonzer o ve ctor ψ ∈ C p satisfies k er ∆ ( z 0 ) ∗ = { αψ : α ∈ C } , then ther e exist α 1 , . . . , α p ∈ C such that α ` 6 = 0 for some ` ∈ { 1 , . . . , p } and ∆ adj ( z 0 ) c an b e written as ∆ adj ( z 0 ) = α 1 ψ ∗ . . . α p ψ ∗ . (2.9) Pr o of Supp ose, to get a contradiction, that dim ker ∆ ( z 0 ) ≥ 2. There exist nonzero vectors ψ 1 , ψ 2 ∈ C p suc h that ψ 1 , ψ 2 are linearly indep endent and ∆ ( z 0 ) ψ 1 = 0, ∆ ( z 0 ) ψ 2 = 0. Let e 1 , . . . , e p b e the standard basis of the p - dimensional Euclidean space. There exists an inv ertible matrix U ∈ C p × p suc h that ψ 1 = U e 1 and ψ 2 = U e 2 . Let us denote by ∆ ` the ` th column v ector of the pro duct ∆U . Then ∆ ` ( z 0 ) = ∆ ( z 0 ) U e ` = ∆ ( z 0 ) ψ ` = 0 ∀ ` ∈ { 1 , 2 } . Since each element of ∆U is holomorphic, there exist v ector-v alued functions b ∆ 1 and b ∆ 2 with each entry holomorphic such that ∆ 1 ( z ) = ( z − z 0 ) b ∆ 1 ( z ) and ∆ 2 ( z ) = ( z − z 0 ) b ∆ 2 ( z ). Thus, det ∆ ( z ) = det( ∆ ( z ) U ) det U − 1 = ( z − z 0 ) 2 det h b ∆ 1 ( z ) b ∆ 2 ( z ) ∆ 3 ( z ) · · · ∆ p ( s ) i det U − 1 , whic h contradicts that z 0 is a simple zero. Sampled-data Output Regulation of Unstable W ell-p osed Systems 11 T o prov e the second assertion, we employ Cramer’s rule ∆∆ adj = ∆ adj ∆ = det ∆ · I . (2.10) W e obtain ∆ adj ( z 0 ) ∆ ( z 0 ) = det ∆ ( z 0 ) I = 0 . Since k er ∆ ( z 0 ) ∗ = { αψ : α ∈ C } , it follo ws that all the ro w v ectors of ∆ adj ( z 0 ) can b e written as αψ ∗ for some α ∈ C . Thus ( 2.9 ) holds. Finally , let us show the existence of a nonzero co efficien t α ` . By contradic- tion, assume that α ` = 0 in ( 2.9 ) for every ` ∈ { 1 , . . . , p } . Then ∆ adj ( z 0 ) = 0. Since ∆ adj and det ∆ are holomorphic, then there exist holomorphic functions F and f such that ∆ adj ( s ) = ( s − z 0 ) F , det ∆ ( s ) = ( s − z 0 ) f . (2.11) Since z 0 is a simple zero of det ∆ , it follo ws that f ( z 0 ) 6 = 0. Substituting ( 2.11 ) to Cramer’s rule ( 2.10 ), w e obtain ∆F = f I . It follo ws that 0 = ψ ∗ ∆ ( z 0 ) F ( z 0 ) = f ( z 0 ) ψ ∗ , whic h contradicts f ( z 0 ) 6 = 0 and ψ 6 = 0. u t The third preliminary lemma provides a stabilizable and detectable real- ization of the series in terconnection of tw o finite-dimensional systems. Lemma 2.8 F or ` ∈ { 1 , 2 } , c onsider the matrix p air ( P ` , Q ` , R ` , S ` ) with appr opriate dimensions and define the tr ansfer function K ` ( z ) := R ` ( z I − P ` ) − 1 Q ` + S ` . Assume that σ ( P 1 ) ∩ σ ( P 2 ) ∩ cl( E 1 ) = ∅ . Assume also that K 1 ( λ ) is ful l c olumn r ank for every λ ∈ σ ( P 2 ) ∩ cl( E 1 ) and that K 2 ( λ ) is ful l r ow r ank for every λ ∈ σ ( P 1 ) ∩ cl( E 1 ) . If ( P ` , Q ` , R ` , S ` ) is stabilizable and dete ctable for ` ∈ { 1 , 2 } , then the r e alization of K 1 K 2 given by P 1 Q 1 R 2 0 P 2 , Q 1 S 2 Q 2 , R 1 S 1 R 2 , S 1 S 2 (2.12) is stabilizable and dete ctable. Pr o of It is well kno wn that ( 2.12 ) is a realization of K 1 K 2 ; see, e.g., Section 3.6 of [ 56 ]. It suffices to show that the realization ( 2.12 ) is stabilizable and detectable. Assume, to reach a con tradiction, that the realization ( 2.12 ) is not stabi- lizable. Then there exist an eigenv alue λ ∈ σ ( P 1 ) ∪ σ ( P 2 ) with | λ | ≥ 1 and v ectors ψ 1 , ψ 2 suc h that ψ 1 ψ 2 6 = 0 , ψ ∗ 1 ψ ∗ 2 λI − P 1 − Q 1 R 2 0 λI − P 2 = 0 , ψ ∗ 1 ψ ∗ 2 Q 1 S 2 Q 2 = 0 . 12 Masashi W ak aiki, Hideki Sano F or the case λ ∈ σ ( P 2 ), we obtain λ ∈ % ( P 1 ) by the assumption σ ( P 1 ) ∩ σ ( P 2 ) ∩ cl( E 1 ) = ∅ , and hence ψ 1 = 0 from ψ ∗ 1 ( λI − P 1 ) = 0. Therefore, ψ ∗ 2 ( λI − P 2 ) = 0 , ψ ∗ 2 Q 2 = 0 . Using the stabilizabilit y of ( P 2 , Q 2 ), w e find ψ 2 = 0. This is a con tradiction. Supp ose next that λ ∈ σ ( P 1 ). Then λI − P 2 is in vertible b y the assumption σ ( P 1 ) ∩ σ ( P 2 ) ∩ cl( E 1 ) = ∅ . Therefore, ψ ∗ 2 = ψ ∗ 1 Q 1 R 2 ( λI − P 2 ) − 1 . (2.13) W e obtain ψ ∗ 1 Q 1 K 2 ( λ ) = ψ ∗ 1 Q 1 ( R 2 ( λI − P 2 ) − 1 Q 2 + S 2 ) = ψ ∗ 1 ψ ∗ 2 Q 1 S 2 Q 2 = 0 . Since K 2 ( λ ) is full ro w rank, it follo ws that ψ ∗ 1 Q 1 = 0. T ogether with ψ ∗ 1 ( λI − P 1 ) = 0, this implies ψ 1 = 0 b y the stabilizabilit y of ( P 1 , Q 1 ). Hence ψ 2 = 0 b y ( 2.13 ). This is a contradiction. Thus, the realization ( 2.12 ) is stabilizable. The detectabilit y of the realization ( 2.12 ) can b e obtained in a similar wa y . u t 2.4 Pro of of Theorem 2.5 Let us start to prov e Theorem 2.5 , by using Lemmas 2.6 – 2.8 . T o construct finite-dimensional regulating controllers, we approximate the infinite-dimensional stable part G − in ( 2.7 ) by a rational function. In the next result, the approx- imation error is used to characterize the norm of a certain matrix, which will app ear in in terp olation conditions on the b oundary T . Lemma 2.9 Assume that h a 1 i – h a 7 i hold. Define δ ∗ := max ( D + G ) − 1 ( e iθ ` ) C p × p : ` ∈ { 1 , . . . , n } . (2.14) F or every r ational function R ∈ H ∞ ( E 1 , C p × p ) satisfying k G − − R k H ∞ ( E 1 ) < 1 2 δ ∗ k D + k H ∞ ( E 1 ) , (2.15) we obtain ( N + + D + R ) − 1 ( e iθ ` ) C p × p < 2 δ ∗ ∀ ` ∈ { 1 , . . . , n } . (2.16) Pr o of The assumption h a 1 i yields det D + ( e iθ ` ) 6 = 0 for every ` ∈ { 1 , . . . , n } , whic h together with h a 2 i implies that δ ∗ is w ell defined. Since G = G + + G − = D − 1 + N + + G − , w e hav e from ( 2.14 ) that ( N + + D + G − ) − 1 ( e iθ ` ) C p × p = ( D + G ) − 1 ( e iθ ` ) C p × p ≤ δ ∗ Sampled-data Output Regulation of Unstable W ell-p osed Systems 13 for ev ery ` ∈ { 1 , . . . , n } . Moreov er, for every ` ∈ { 1 , . . . , n } , D + ( e iθ ` ) C p × p ≤ k D + k H ∞ ( E 1 ) G − ( e iθ ` ) − R ( e iθ ` ) C p × p ≤ k G − − R k H ∞ ( E 1 ) . Th us we conclude from Lemma 2.6 and ( 2.15 ) that for ev ery ` ∈ { 1 , . . . , n } , the matrix ( N + + D + R )( e iθ ` ) is in vertible and satisfies ( N + + D + R ) − 1 ( e iθ ` ) C p × p ≤ ( N + + D + G − ) − 1 ( e iθ ` ) C p × p 1 − k ( N + + D + G − ) − 1 ( e iθ ` ) k C p × p · k D + k H ∞ ( E 1 ) · k G − − R k H ∞ ( E 1 ) < 2 δ ∗ , whic h is the desired inequality . u t F or the rational functions N + , D + , which are left coprime ov er the sets of rational functions in H ∞ ( E 1 , C p × p ), there exists a strictly proper rational function Y + ∈ H ∞ ( E 1 , C p × p ) and a rational function Z + ∈ H ∞ ( E 1 , C p × p ) suc h that the B´ ezout iden tity N + Y + + D + Z + = I (2.17) holds; see, e.g., Lemma 5.2.9 of [ 47 ] and its proof. W e pro vide in terp olation conditions that such a rational function Y + ∈ H ∞ ( E 1 , C p × p ) satisfies, as in Theorem IV.3 of [ 49 ]. T o that purp ose, we see from Lemma 2.7 and h a 7 i that, for every r ∈ { 1 , . . . , Υ } , there exists a nonzero vector ψ r ∈ C p suc h that k er D + ( χ r ) ∗ = { αψ r : α ∈ C } . Lemma 2.10 Supp ose that h a 1 i – h a 7 i ar e satisfie d. A r ational function Y + ∈ H ∞ ( E 1 , C p × p ) is strictly pr op er and satisfies the B´ ezout identity ( 2.17 ) for some r ational function Z + ∈ H ∞ ( E 1 , C p × p ) if and only if the interp olation c onditions Y + ( ∞ ) = 0 , ψ ∗ r N + ( χ r ) Y + ( χ r ) = ψ ∗ r ∀ r ∈ { 1 , . . . , Υ } (2.18) hold. Mor e over, if the latter p art of the interp olation c onditions ( 2.18 ) holds, then a r ational function Z + := D adj + − D adj + N + Y + det D + (2.19) satisfies Z + ∈ H ∞ ( E 1 , C p × p ) and the B´ ezout idendity ( 2.17 ) . Pr o of It is clear that the strict properness of Y + is equiv alen t to Y + ( ∞ ) = 0. Supp ose that rational functions Y + , Z + ∈ H ∞ ( E 1 , C p × p ) satisfy the B´ ezout iden tity ( 2.17 ). Using Cramer’s rule for D + , w e obtain D adj + = D adj + ( N + Y + + D + Z + ) = D adj + N + Y + + det D + · Z + . (2.20) 14 Masashi W ak aiki, Hideki Sano F or every r ∈ { 1 , . . . , Υ } , we obtain det D + ( χ r ) = 0 and hence D adj + ( χ r ) = ( D adj + N + Y + )( χ r ) . The second statemen t of Lemma 2.7 sho ws that ψ ∗ r N + ( χ r ) Y + ( χ r ) = ψ ∗ r for ev ery r ∈ { 1 , . . . , Υ } . Con versely , suppose that a rational function Y + ∈ H ∞ ( E 1 , C p × p ) sat- isfies the interpolation conditions ( 2.18 ). T o show that the B ´ ezout identit y ( 2.17 ) holds for some rational function Z + ∈ H ∞ ( E 1 , C p × p ), it suffices to pro ve that Z + defined by ( 2.19 ) satisfies the B´ ezout identit y ( 2.17 ) and Z + ∈ H ∞ ( E 1 , C p × p ). Using Cramer’s rule for D + , we find that Z + satisfies the B´ ezout identit y ( 2.17 ). By wa y of contradiction, assume that Z + 6∈ H ∞ ( E 1 , C p × p ). Let the ( j, ` )th entry Z j,` + of Z + satisfy Z j,` + 6∈ H ∞ ( E 1 ). By definition, Z j,` + is rational. Using again Cramer’s rule for D + , w e derive det D + · Z + = D adj + ( I − N + Y + ) ∈ H ∞ ( E 1 , C p × p ) . Since a rational function det D + is not strictly proper by Theorem 4.3.12 of [ 47 ], it follows that Z j,` + is prop er. Therefore, there exists a p ole of the rational function Z j,` + in cl( E 1 ) that is equal to a zero χ r 0 of det D + . Since χ r 0 is a simple zero, it follo ws that det D + · Z j,` + ( χ r 0 ) 6 = 0 . (2.21) Ho wev er, by the latter part of the interpolation conditions ( 2.18 ) and Lemma 2.7 , w e obtain (det D + · Z + )( χ r 0 ) = D adj + ( χ r 0 )( I − N + Y + )( χ r 0 ) = 0 . This con tradicts ( 2.21 ). u t Set M > 0 as in M > inf k Y k H ∞ ( E 1 ) : Y + ∈ H ∞ ( E 1 , C p × p ) is rational and satisfies ( 2.18 ) . (2.22) Since there alwa ys exists a rational function Y + ∈ H ∞ ( E 1 , C p × p ) satisfying the in terp olation conditions ( 2.18 ), the right side of ( 2.22 ) b elongs to R + . The boundary interpolation conditions in Lemma 2.11 b elow is used for the incorp oration of a p -cop y internal mo del. Lemma 2.11 Assume that h a 1 i – h a 7 i hold, and define δ ∗ > 0 by ( 2.14 ) . F or every r ational function R ∈ H ∞ ( E 1 , C p × p ) satisfying ( 2.16 ) , ther e exist a strictly pr op er r ational function Y + ∈ H ∞ ( E 1 , C p × p ) and a r ational function Z + ∈ H ∞ ( E 1 , C p × p ) such that Y + satisfies the interp olation c onditions Y + ( e iθ ` ) = ( N + + D + R ) − 1 ( e iθ ` ) ∀ ` = { 1 , . . . , n } (2.23a) Y 0 + ( e iθ ` ) = − ( N + + D + R ) − 1 ( e iθ ` ) D + ( e iθ ` ) (2.23b) + ( N + + D + R ) 0 ( e iθ ` )( N + + D + R ) − 1 ( e iθ ` ) ∀ ` = { 1 , . . . , n } , Sampled-data Output Regulation of Unstable W ell-p osed Systems 15 the norm c ondition k Y + k H ∞ ( E 1 ) < max { 2 δ ∗ , M } , (2.24) and the B ´ ezout identity ( 2.17 ) hold. Pr o of Lemma 2.10 shows that a rational function Y + ∈ H ∞ ( E 1 , C p × p ) is strictly prop er and satisfies the B´ ezout identit y ( 2.17 ) for some rational func- tion Z + ∈ H ∞ ( E 1 , C p × p ) if and only if the interpolation conditions ( 2.18 ) hold. Hence the problem of finding the desired Y + , Z + ∈ H ∞ ( E 1 , C p × p ) is equiv- alen t to that of finding a rational function Y + ∈ H ∞ ( E 1 , C p × p ) satisfying the in terior interpolation conditions ( 2.18 ), the b oundary interpolation condi- tions ( 2.23 ), and the norm condition ( 2.24 ), which is called the Nevanlinna- Pick interp olation pr oblem with b oth interior and b oundary c onditions ; see App endix A for details. This interpolation problem is solv able if R satisfies ( 2.16 ). Once we obtain a solution Y + ∈ H ∞ ( E 1 , C p × p ) of the interpolation problem, Z + ∈ H ∞ ( E 1 , C p × p ) defined b y ( 2.19 ) satisfies the B ´ ezout identit y ( 2.17 ). u t Lemma 2.12 Assume that h a 1 i – h a 7 i hold. Supp ose that a r ational function R ∈ H ∞ ( E 1 , C p × p ) satisfies ( 2.16 ) . L et a strictly pr op er r ational function Y + ∈ H ∞ ( E 1 , C p × p ) and a pr op er r ational function Z + ∈ H ∞ ( E 1 , C p × p ) satisfy the interp olation c onditions ( 2.23 ) and the B´ ezout identity ( 2.17 ) . Then the fol lowing r esults hold: (a) Y + and Z + − R Y + ar e right c oprime over the set of r ational functions in H ∞ ( E 1 ) . (b) The r ational function define d by K := Y + ( Z + − R Y + ) − 1 (2.25) is strictly pr op er and satisfies K = Y + I − ( N + + D + R ) Y + − 1 D + . (2.26) (c) Ther e exists a r ational function b Z + ∈ H ∞ ( E 1 , C p × p ) such that ( Z + − R Y + )( z ) = n Y ` =1 ( z − e iθ ` ) · b Z + ( z ) (2.27a) det b Z + ( e iθ ` ) 6 = 0 . (2.27b) Pr o of (a) By the B´ ezout identit y ( 2.17 ), ( N + + D + R ) Y + + D + ( Z + − R Y + ) = I . Hence Y + and Z + − R Y + are right coprime o ver the sets of rational functions in H ∞ ( E 1 ). 16 Masashi W ak aiki, Hideki Sano (b) Since Y + ( ∞ ) = 0, it follows from the B´ ezout iden tity ( 2.17 ) that Z + ( ∞ ) is in vertible. Therefore, K ( ∞ ) = 0 and K is strictly prop er. The B ´ ezout identit y ( 2.17 ) also yields Z + − R Y + = D − 1 + ( I − N + Y + ) − R Y + = D − 1 + ( I − ( N + + D + R ) Y + ) . (2.28) Therefore, w e obtain ( 2.26 ). (c) T o sho w the existence of a rational function b Z + ∈ H ∞ ( E 1 , C p × p ) sat- isfying ( 2.27 ), it suffices to prov e ( Z + − R Y + )( e iθ ` ) = 0 ∀ ` ∈ { 1 , . . . , n } (2.29) and ( Z + − R Y + ) 0 ( e iθ ` ) is inv ertible for all ` ∈ { 1 , . . . , n } . W e immediately obtain ( 2.29 ) from ( 2.23a ) and ( 2.28 ). W e also hav e ( Z + − R Y + ) 0 ( e iθ ` ) = D − 1 + ( e iθ ` ) I − ( N + + D + R ) Y + 0 ( e iθ ` ) for ev ery ` ∈ { 1 , . . . , n } . The interpolation condition ( 2.23b ) yields I − ( N + + D + R ) Y + 0 ( e iθ ` ) = D + ( e iθ ` ) ∀ ` ∈ { 1 , . . . , n } . Th us, ( Z + − R Y + ) 0 ( e iθ ` ) = I for all ` ∈ { 1 , . . . , n } . This completes the pro of. u t F or δ ∗ in ( 2.14 ) and M in ( 2.22 ), define M 1 := max { 2 δ ∗ , M } . (2.30) The following lemma provides a sufficient condition for the robust output regulation problem to b e solv able. Lemma 2.13 Assume that h a 1 i – h a 7 i hold. Cho ose a r ational function R ∈ H ∞ ( E 1 , C p × p ) so that k G − − R k H ∞ ( E 1 ) < 1 M 1 k D + k H ∞ ( E 1 ) . (2.31) L et a strictly pr op er r ational function Y + ∈ H ∞ ( E 1 , C p × p ) and a pr op er r atio- nal function Z + ∈ H ∞ ( E 1 , C p × p ) satisfy the interp olation c onditions ( 2.23 ) , the norm c ondition ( 2.24 ) , and the B´ ezout identity ( 2.17 ) . Then ther e exists a r e alization ( P , Q, R ) of the r ational function K define d by ( 2.25 ) such that the c ontr ol ler ( 2.2 ) with this r e alization ( P, Q, R ) is a solution of Pr oblem 2.2 . Pr o of Let a rational function R ∈ H ∞ ( E 1 , C p × p ) satisfy ( 2.31 ). Since 1 M 1 k D + k H ∞ ( E 1 ) ≤ 1 2 δ ∗ k D + k H ∞ ( E 1 ) , Lemma 2.9 sho ws that R satisfies ( 2.16 ). Sampled-data Output Regulation of Unstable W ell-p osed Systems 17 Due to Theorem 2.4 , it is enough to pro ve that there exists a realization ( P , Q, R ) of the rational function K defined b y ( 2.25 ) such that A e defined b y ( 2.5 ) is p o wer stable and ( 2.6 ) holds. Let us first find a stabilizable and detectable realization ( P, Q, R ) of K sat- isfying ( 2.6 ). In the single-input and single-output case p = 1, Lemma A.7.39 of [ 10 ] directly shows that a minimal realization ( P , Q, R ) of K satisfies ( 2.6 ). F or the multi-input and multi-output case p > 1, we decomp ose K and then use Lemma 2.8 . Fix a ∈ ( − 1 , 1), and let a strictly prop er rational function Y + ∈ H ∞ ( E 1 , C p × p ) and a prop er rational function Z + ∈ H ∞ ( E 1 , C p × p ) sat- isfy the interpolation conditions ( 2.23 ), the norm condition ( 2.24 ), and the B ´ ezout identit y ( 2.17 ). Cho ose a rational function b Z + ∈ H ∞ ( E 1 , C p × p ) satis- fying ( 2.27 ). Define K 1 ( z ) := n Y ` =1 z − a z − e iθ ` I , K 2 ( z ) := Y + ( z ) ( z − a ) n b Z + ( z ) − 1 . (2.32) Then K = K 1 K 2 . F or ev ery ` ∈ { 1 , . . . , n } , let c ` ∈ C b e the residue of Q n j =1 z − a z − e iθ j at z = e iθ ` . Using the iden tity matrix I with dimension p , we define P 1 := diag e iθ 1 I , . . . , e iθ n I , Q 1 := I . . . I , R 1 := c 1 I · · · c n I , S 1 := I . (2.33) Then ( P 1 , Q 1 , R 1 , S 1 ) is a minimal realization of K 1 , and dim ker( e iθ ` I − P 1 ) ≥ p ∀ ` ∈ { 1 , . . . , n } . (2.34) Let ( P 2 , Q 2 , R 2 , S 2 ) b e a minimal realization of K 2 . Since K 2 is strictly proper, it follows that S 2 = 0. In addition, the realizations ( P 1 , Q 1 , R 1 , S 1 ) and ( P 2 , Q 2 , R 2 , S 2 ) satisfy the conditions in Lemma 2.8 . By (a) of Lemma 2.12 , Y + and ( z − a ) n b Z + are right coprime. Lemma A.7.39 of [ 10 ] shows that every ` ∈ { 1 , . . . , n } satis- fies e iθ ` 6∈ σ ( P 2 ) by ( 2.27b ). Hence σ ( P 1 ) ∩ σ ( P 2 ) ∩ cl( E 1 ) = ∅ . By definition, det K 1 ( λ ) 6 = 0 for every λ ∈ σ ( P 2 ) ∩ cl( E 1 ). Since the interpolation condition ( 2.23a ) implies that Y + ( e iθ ` ) is in vertible for ev ery ` ∈ { 1 , . . . , n } , it follows that det K 2 ( λ ) 6 = 0 for every λ ∈ σ ( P 1 ) ∩ cl( E 1 ) = { e iθ 1 , . . . , e iθ n } . Therefore, Lemma 2.8 shows that the realization ( P , Q, R ) of K = K 1 K 2 in the form ( 2.12 ) is stabilizable and detectable. By ( 2.34 ), ( 2.6 ) is satisfied. W e can see the p ow er stability of A e from the same argument as in the pro ofs of Theorem 7 in [ 24 ] and Theorem 9 in [ 25 ]. Using ( 2.31 ) and k Y + k H ∞ ( E 1 ) < M 1 , w e derive k D + ( G − − R ) Y + k H ∞ ( E 1 ) ≤ k D + k H ∞ ( E 1 ) · k G − − R k H ∞ ( E 1 ) · k Y + k H ∞ ( E 1 ) < 1 . Therefore U := ( D + G − + N + ) Y + + D + ( Z + − R Y + ) satisfies k U − I k H ∞ ( E 1 ) = k D + ( G − − R ) Y + k H ∞ ( E 1 ) < 1 , 18 Masashi W ak aiki, Hideki Sano whic h yields U , U − 1 ∈ H ∞ ( E 1 , C p × p ). Since ( I + GK ) − 1 = ( Z + − R Y + ) U − 1 D + , G = D − 1 + ( N + + D + G − ) , it follo ws that I − K G I − 1 = I − K ( I + GK ) − 1 G K ( I + GK ) − 1 − ( I + GK ) − 1 G ( I + GK ) − 1 = I − Y + U − 1 ( N + + D + G − ) Y + U − 1 D + − ( Z + − R Y + ) U − 1 ( N + + D + G − ) ( Z + − R Y + ) U − 1 D + ∈ H ∞ ( E 1 , C 2 p × 2 p ) . A routine calculation similar to that for the finite-dimensional case in Lemma 5.3 of [ 56 ] shows that for the transfer functions G of the plant ( 2.1 ) and K of the con troller ( 2.2 ), I 0 D I I − K G I − 1 I 0 D I is the transfer function of the system A e , B 0 0 Q , 0 R − C 0 , I 0 D I . Hence Theorem 2 of [ 24 ] sho ws that A e is p o wer stable if A e , B 0 0 Q , 0 R − C 0 , A e (2.35) is stabilizable and detectable, resp ectively , which is equiv alent to the sta- bilizablit y and detectablility of ( A, B , C ) and ( P , Q, R ). These prop erties of ( A, B , C ) follow from h a 6 i , and w e hav e already pro v ed that ( P , Q, R ) is sta- bilizable and detectable. This completes the pro of. u t W e are now in a p osition to prov e Theorem 2.5 . Pr o of (of The or em 2.5 ) Due to Lemma 2.13 , it remains to show the existence of a rational function R ∈ H ∞ ( E 1 , C p × p ) satisfying ( 2.31 ). Since G − ∈ H ∞ ( E η , C p × p ) for some η ∈ (0 , 1), it follo ws that the T a ylor expansion of G − at ∞ , G − ( z ) = ∞ X j =0 G j z − j , con verges uniformly in E 1 , i.e., lim N →∞ sup z ∈ E 1 G − ( z ) − N X j =0 G j z − j C p × p = 0 . Th us ( 2.31 ) holds with R − ( z ) := N X j =0 G j z − j for all sufficien tly large N ∈ N . u t Sampled-data Output Regulation of Unstable W ell-p osed Systems 19 W e summarize the prop osed metho d for the construction of finite-dimensional regulating con trollers. The problem of finding rational functions in the steps 2 and 5 of the pro cedure b elow is called the Nev anlinna-Pick interpolation problem; see App endix A for details. Design pro cedure of con trollers 1. Obtain a left-coprime factorization D − 1 + N + of a rational function G + o ver the set of rational functions in H ∞ ( E 1 ). 2. Find M > 0 satisfying ( 2.22 ). 3. Set M 1 > 0 as in ( 2.30 ). 4. Find a rational function R ∈ H ∞ ( E 1 , C p × p ) satisfying the norm condition ( 2.31 ). 5. Find a rational function Y + ∈ H ∞ ( E 1 , C p × p ) satisfying the interpolation conditions ( 2.18 ), ( 2.23 ) and the norm condition k Y + k H ∞ ( E 1 ) < M 1 . 6. Define a rational function Z + ∈ H ∞ ( E 1 , C p × p ) b y ( 2.19 ). 7. Calculate a rational function b Z + ∈ H ∞ ( E 1 , C p × p ) satisfying ( 2.27 ). 8. Define the minimal realization ( P 1 , Q 1 , R 1 , S 1 ) as in ( 2.33 ) and compute a minimal realization ( P 2 , Q 2 , R 2 ) of K 2 defined b y ( 2.32 ). 9. Calculate a realization ( 2.12 ), which is a realization of a regulating con- troller. In the single-input and single-output case p = 1, w e can remov e the as- sumption h a 7 i and the redundant steps 6–8 in the ab ov e design pro cedure. T o see this, let the multiplicit y of the zeros χ 1 , . . . , χ Υ in cl( E 1 ) of det( sI − A + ) b e J r ∈ N for r ∈ { 1 , . . . , Υ } . If M 1 > 0 is sufficien tly large, then there exists a rational function Y + ∈ H ∞ ( E 1 ) satisfying the in terp olation conditions Y + ( ∞ ) = 0 , Y + ( χ r ) = 1 N + ( χ r ) ( 2.18 0 a) Y ( j ) + ( χ r ) = − 1 N + ( χ r ) j − 1 X ` =0 j ! ` !( j − ` )! N ( j − ` ) ( χ r ) Y ( ` ) + ( χ r ) ( 2.18 0 b) for all r ∈ { 1 , . . . , Υ } , j ∈ { 1 , . . . , J r } and Y + ( e iθ ` ) = 1 N + ( e iθ ` ) + D + ( e iθ ` ) R ( e iθ ` ) ( 2.23 0 ) for all ` ∈ { 1 , . . . , n } and the norm condition k Y + k H ∞ ( E 1 ) < M 1 . See, e.g., [ 30 ] for an algorithm to compute a rational function Y + ∈ H ∞ ( E 1 ) satisfying these interpolation and norm conditions. F or a rational function R ∈ H ∞ ( E 1 ) satisfying ( 2.31 ), K := Y + D + 1 − ( N + + D + R ) Y + 20 Masashi W ak aiki, Hideki Sano is strictly prop er, has a p ole at z = e iθ ` for all ` ∈ { 1 , . . . , n } , and satisfies 1 − K G 1 − 1 ∈ H ∞ ( E 1 , C 2 × 2 ) . As commented in the pro of of Lemma 2.13 , we see from Lemma A.7.39 of [ 10 ] that a minimal realization ( P , Q, R ) of K satisfies ( 2.6 ). Thus, ( P , Q, R ) is a realization of a regulating controller. Since this result can b e obtained by a slight mo dification of the argument for the multi-inp ut multi-output case p > 1, w e omit the details for the sake of brevity . 3 Sampled-data output regulation for constant reference and disturbance signals In this section, w e in v estigate sampled-data robust output regulation for un- stable well-posed systems with constant reference and disturbance signals. T o this end, we employ the results for discrete-time systems developed in Sec- tion 2 . Ho wev er, there remains tw o issues to b e solved: – What c onditions ar e r e quir e d for the original c ontinuous-time system in or der to guar ante e the c onditions h a 1 i – h a 7 i of the discr etize d system? – Do es output r e gulation at sampling instants imply c ontinuous-time output r e gulation? The main difficulty of the first problem is to obtain the relationship b etw een the transfer function G ( s ) of the original contin uous-time system and the transfer function G τ ( z ) of the discretized system with sampling perio d τ > 0. W e here show that G τ (1) = G (0). This equality allows us to chec k the assumption h a 2 i , det G τ (1) 6 = 0, by using only G ( s ). F or exp onentially stable w ell-p osed systems, G τ (1) = G (0) has b een pro ved in Prop osition 4.3 of [ 28 ] and Proposition 3.1 of [ 20 ]. W e extend these results to systems whose unstable part is finite-dimensional. The p oin t of the proof is to decomp ose G ( s ) in to the unstable part G + ( s ) and the stable part G − ( s ). F or the second issue, we first prov e that the output has the limit as t → ∞ in the “energy” sense. Next, w e show that this limit coincides the v alue of the constan t reference signal if output regulation at sampling instan ts is achiev ed. W e further prov e that if a smo othing precomp ensator is embedded b etw een the zero-order hold and the plant, then the output exp onentially con v erges to the constan t reference signal in the usual sense under a certain regularity condition on the initial states. In Section 3.1 , we recall briefly some facts on well-posed contin uous-time systems. In Section 3.2 , we introduce sampled-data systems and formulate the problem of sampled-data robust output regulation for constan t reference and disturbance signals. W e place assumptions on the original contin uous-time systems in Section 3.3 and reduce them to the assumptions h a 1 i – h a 7 i on the discretized system in Section 3.4 . Finally , Section 3.5 is devoted to solving the sampled-data output regulation problem. Sampled-data Output Regulation of Unstable W ell-p osed Systems 21 3.1 Preliminaries on w ell-p osed systems W e provide brief preliminaries on w ell-p osed linear systems and refer the read- ers to the surveys [ 45 , 50 ] and the b o ok [ 44 ] for more details. As a plan t, we consider a well-posed system Σ with state space X , input space C p , and out- put space C p , generating op erators ( A, B , C ), transfer function G , and input- output op erator G . Here X is a separable complex Hilbert space with norm k · k and A is the generator of a strongly con tin uous semigroup T = ( T t ) t ≥ 0 on X . The spaces X 1 and X − 1 are the interpolation and extrap olation spaces as- so ciated with T , respectively . F or λ ∈ % ( A ), the space X 1 is defined as dom( A ) endo wed with the norm k ζ k 1 := k ( λI − A ) ζ k , and X − 1 is the completion of X with resp ect to the norm k ζ k − 1 := k ( λI − A ) − 1 ζ k . Different choices of λ lead to equiv alen t norms on X 1 and X − 1 . The semigroup T restricts to a strongly con tinuous semigroup on X 1 , and the generator of the restricted semigroup is the part of A in X 1 . Similarly , T can be uniquely extended to a strongly con tinuous semigroup on X − 1 , and the generator of the extended semigroup is an extension of A with domain X . The restriction and extension of T hav e the same exp onential gro wth b ound as the original semigroup T . W e denote the restrictions and extensions of T and A b y the same symbols. W e refer the reader to Sec tion II.5 of [ 11 ] and Section 2.10 of [ 45 ] for more details on the in terp olation and extrap olation spaces. W e place the follo wing conditions for the system no de ( A, B , C, G ) to b e w ell p osed: – The op erator B satisfies B ∈ L ( C p , X − 1 ) and is an admissible control op erator for T , that is, for ev ery t ≥ 0, there exists b t ≥ 0 suc h that Z t 0 T t − s B u ( s ) ds ≤ b t k u k L 2 (0 ,t ) ∀ u ∈ L 2 ([0 , t ] , C p ) . – The op erator C satisfies C ∈ L ( X 1 , C p ) and is an admissible observ ation op erator for T , that is, for ev ery t ≥ 0, there exists c t ≥ 0 suc h that Z t 0 k C T s ζ k 2 C p ds 1 / 2 ≤ c t k ζ k ∀ ζ ∈ X 1 . – The transfer function G : C ω ( T ) → C p × p satisfies G ( s ) − G ( λ ) = − ( s − λ ) C ( sI − A ) − 1 ( λI − A ) − 1 B ∀ s, λ ∈ C ω ( T ) (3.1) and G ∈ H ∞ ( C α , C p × p ) for ev ery α > ω ( T ). The transfer function G ma y ha v e an analytic extension to a half plane C α with α < ω ( T ). If it exists, w e sa y that G is holomorphic (meromorphic) on C α and use the same sym b ol G for an analytic extension to a larger righ t half plane. F or every α > ω ( T ), the input-output op erator G : L 2 loc ( R + , C p ) → L 2 loc ( R + , C p ) satisfies G ∈ L L 2 α ( R + , C p ) , L 2 α ( R + , C p ) and L ( Gu )( s ) = G ( s ) L ( u ) ( s ) ∀ s ∈ C α , ∀ u ∈ L 2 α ( R + , C p ) , 22 Masashi W ak aiki, Hideki Sano where L denotes the Laplace transform. The Λ -extension C Λ of C is defined by C Λ ζ := lim s →∞ , s ∈ R C s ( sI − A ) − 1 ζ with domain dom( C Λ ) consisting of those ζ ∈ X for which the limit exists. F or ev ery ζ ∈ X , we obtain T t ζ ∈ dom( C Λ ) for a.e. t ≥ 0. By the admissibility of C , for every t ≥ 0, there exists c t ≥ 0 suc h that Z t 0 k C Λ T s ζ k 2 C p ds 1 / 2 ≤ c t k ζ k ∀ ζ ∈ X . If w e define the op erator Ψ : X → L 2 loc ( R + , C p ) b y ( Ψ ζ )( t ) := C Λ T t ζ ∀ ζ ∈ X , a . e . t ≥ 0 , then Ψ satisfies Ψ ∈ L X, L 2 α ( R + , C p ) for ev ery α > ω ( T ). The Laplace transform of Φζ is given b y C ( sI − A ) − 1 ζ for ev ery ζ ∈ X and ev ery s ∈ C ω ( T ) . Fix λ ∈ C ω ( T ) arbitrarily . Let x and y denote, resp ectively , the state and output functions of the well-posed system Σ with the initial condition x (0) = x 0 ∈ X and the input function u ∈ L 2 loc ( R + , C p ). The state x and the output y satisfy x ( t ) = T t x 0 + Z t 0 T t − s B u ( s ) ds ∀ t ≥ 0 , (3.2) x ( t ) − ( λI − A ) − 1 B u ( t ) ∈ dom( C Λ ) for a.e. t ≥ 0, and ˙ x ( t ) = Ax ( t ) + B u ( t ) , x (0) = x 0 ∈ X a . e . t ≥ 0 (3.3a) y ( t ) = C Λ x ( t ) − ( λI − A ) − 1 B u ( t ) + G ( λ ) u ( t ) a . e . t ≥ 0 , (3.3b) where the differential equation ( 3.3a ) is interpreted on X − 1 . W e hav e from ( 3.2 ) and ( 3.3b ) that for ev ery u ∈ L 2 loc ( R + , C p ) and a.e. t ≥ 0, the input- output op erator G satisfies ( Gu )( t ) = C Λ Z t 0 T t − s B u ( s ) ds − ( λI − A ) − 1 B u ( t ) + G ( λ ) u ( t ) . (3.4) 3.2 Closed-lo op system and con trol ob jective Let τ > 0 denote the sampling p erio d. The zero-order hold op erator H τ : F ( Z + , C p ) → L 2 loc ( R + , C p ) is defined b y ( H τ f )( k τ + t ) := f ( k ) ∀ t ∈ [0 , τ ) , ∀ k ∈ Z + . The generalized sampling operator S τ : L 2 loc ( R + , C p ) → F ( Z + , C p ) is defined b y ( S τ g )( k ) := Z τ 0 w ( t ) g ( k τ + t ) dt ∀ k ∈ Z + , Sampled-data Output Regulation of Unstable W ell-p osed Systems 23 where the scalar w eighting function w satisfies w ∈ L 2 (0 , τ ) and Z τ 0 w ( t ) dt = 1 . The outputs of well-posed systems are in L 2 loc , and hence the abov e type of generalized sampling is reasonable. Note that con trollers connected to the sampler ab o ve need to b e strictly causal, i.e., hav e no feedforward term. W e connect the con tin uous-time system ( 3.3 ) and the discrete-time con- troller ( 2.2 ) via the follo wing sampled-data feedback law: u = H τ y d + v 1 R + , u d = y ref 1 Z + − S τ y , where y ref 1 Z + and v 1 R + with y ref ∈ C p and v ∈ C p are the constant reference and disturbance signals, respectively . These signals are constan t, but their v alues y ref and v are unknown when w e design controllers. The dynamics of the sampled-data system is giv en by ˙ x = Ax + B ( H τ y d + v 1 R + ) , x (0) = x 0 ∈ X (3.5a) y = C Λ x − ( λI − A ) − 1 B ( H τ y d + v 1 R + ) + G ( λ )( H τ y d + v 1 R + ) (3.5b) x 5 d = P x d + Q ( y ref 1 Z + − S τ y ) , x d (0) = x 0 d ∈ X d (3.5c) y d = Rx d . (3.5d) W e define the exp onential stability of this sampled-data system. Definition 3.1 (Exp onential stabilit y) The sample d-data system ( 3.5 ) is exp onential ly stable if ther e exist Γ ≥ 1 and γ > 0 such that x ( k τ + t ) x d ( k ) X × X d ≤ Γ e − γ ( k τ + t ) x 0 x 0 d X × X d + k y ref k C p + k v k C p ! (3.6) ∀ k ∈ Z + , ∀ t ∈ [0 , τ ) , ∀ x 0 ∈ X, ∀ x 0 d ∈ X d , ∀ y ref , v ∈ C p . W e consider a set of p erturb ed plants O s ( P , Q, R ) defined as follo ws. Definition 3.2 (Set of perturb ed plants) F or given op er ators P ∈ L ( X d ) , Q ∈ L ( C p , X d ) , and R ∈ L ( X d , C p ) , O s ( P , Q, R ) is the set of system no des ( e A, e B , e C , e G ) satisfying the fol lowing two c onditions: 1. The op er ators ( e A, e B , e C ) and the tr ansfer function e G gener ate a wel l-p ose d system with state sp ac e X , input sp ac e C p , and output sp ac e C p . 2. The p erturb e d sample d-data system, in which the system no de ( A, B , C , G ) is change d to ( e A, e B , e C , e G ) , is exp onential ly stable. In this section, w e study the following sampled-data robust output regula- tion problem. Problem 3.3 (Robust output regulation for sampled-data systems) Find a c ontr ol ler ( 2.2 ) such that the fol lowing thr e e pr op erties hold for the sample d-data system ( 3.5 ) : 24 Masashi W ak aiki, Hideki Sano Stability: The sample d-data system ( 3.5 ) is exp onential ly stable. T r acking: Ther e exist Γ ref > 0 and α < 0 such that k y − y ref 1 R + k L 2 α ≤ Γ ref x 0 x 0 d X × X d + k y ref k C p + k v k C p ! (3.7) ∀ x 0 ∈ X, ∀ x 0 d ∈ X d , ∀ y ref , v ∈ C p . R obustness: If the system no de ( A, B , C , G ) is change d to ( e A, e B , e C , e G ) ∈ O s ( P , Q, R ) , then the ab ove tr acking pr op erty stil l holds. 3.3 Assumptions on w ell-p osed systems In what follo ws, w e impose sev eral assumptions on the well-posed system ( 3.3 ). h b1 i 0 ∈ % ( A ). h b2 i det G (0) 6 = 0. h b3 i There exists ε > 0 such that σ ( A ) ∩ cl( C − ε ) consists of finitely many isolated eigen v alues of A with finite algebraic multiplicities. Under the assumption h b 3 i , w e obtain the follo wing spectral decomposition of X for A ; see, e.g., Lemma 2.5.7 of [ 10 ] or Prop osition IV.1.16 of [ 11 ]. There exists a rectifiable, closed, simple curve Φ in C enclosing an open set that con tains σ ( A ) ∩ cl( C 0 ) in its in terior and σ ( A ) ∩ C \ cl( C 0 ) in its exterior. The op erator Π := 1 2 π i Z Φ ( sI − A ) − 1 ds (3.8) is a pro jection on X . Define X + := Π X and X − := ( I − Π ) X . Then X = X + ⊕ X − , dim X + < ∞ , and X + ⊂ X 1 . The subspaces X + and X − are T t -in v ariant for all t ≥ 0. Define A + := A | X + , T + t := T t | X + , A − := A | X 1 ∩ X − , T − t := T t | X − . Then σ ( A + ) = σ ( A ) ∩ cl( C 0 ) , σ ( A − ) = σ ( A ) ∩ C \ cl( C 0 ) , and T + := ( T + t ) t ≥ 0 and T − := ( T − t ) t ≥ 0 are strongly contin uous semigroups on X + and X − with generators A + and A − , resp ectively . The pro jection op erator Π on X can b e extended to a pro jection Π − 1 on X − 1 , and Π − 1 X − 1 = Π X = X + . W e define B + := Π − 1 B , C + := C | X + , B − := ( I − Π − 1 ) B , C − := C | X 1 ∩ X − . W e can uniquely extend the semigroup T − t to a strongly con tinuous semigroup on ( X − ) − 1 , and the generator of the extended semigroup is an extension of A − . The same symbols T − t and A − will be used to denote the extensions. Note that w e can identit y ( X − ) − 1 and ( X − 1 ) − := ( I − Π − 1 ) X − 1 as men tioned in the fo otnote 2 on p. 1357 of [ 27 ]. W e are now in a p osition to formulate the remaining assumptions. Sampled-data Output Regulation of Unstable W ell-p osed Systems 25 h b4 i The strongly contin uous semigroup T − = ( T − t ) t ≥ 0 is exp onen tially stable. h b5 i ( A + , B + , C + ) is con trollable and observ able. h b6 i 2 `π i/τ 6∈ σ ( A + ) for ev ery ` ∈ Z \ { 0 } . h b7 i R τ 0 w ( t ) e λt dt 6 = 0 for ev ery λ ∈ σ ( A + ). h b8 i τ ( λ − µ ) 6 = 2 `π i for ev ery λ, µ ∈ σ ( A + ) and for ev ery ` ∈ Z \ { 0 } . h b9 i The zeros of det( sI − A + ) are simple. As in the discrete-time case, w e assume h b 1 i and h b 2 i for output regula- tion. F or the design of regulating controllers, we place the assumption h b 9 i but can remo ve it in the single-input and single-output case p = 1, as com- men ted in Section 2 . Prop osition 5 and Theorem 9 of [ 25 ] sho w that for the existence of stabilizing controllers, the conditions h b 3 i – h b 7 i are sufficient, and the conditions h b 3 i – h b 8 i are necessary and sufficien t in the case p = 1. Define the input-output op erator G + of the finite-dimensional system ( A + , B + , C + ) b y ( G + u )( t ) := Z t 0 C + e A + ( t − s ) B + u ( s ) ds ∀ t ≥ 0 , ∀ u ∈ L 2 loc ( R + , C p ) . and define G − := G − G + . W e use the following result on the decomposition of the output: Lemma 3.4 (Lemma 4.2 in [ 27 ]) Assume that h b 3 i holds. Ther e exists a wel l-p ose d system Σ − with gener ating op er ator ( A − , B − , C − ) and input-output op er ator G − . F or every x 0 ∈ X and every u ∈ L 2 loc ( R + , C p ) , the output y of the wel l-p ose d system ( 3.3 ) c an b e written in the form y ( t ) = C + Π x ( t ) + ( C − ) Λ T − t ( I − Π ) x 0 + ( G − u )( t ) a . e . t ≥ 0 . (3.9) The Λ -extension of C − satisfies ( C − ) Λ ζ = C Λ ζ ∀ ζ ∈ dom ( C − ) Λ = dom( C Λ ) ∩ X − . (3.10) 3.4 Prop erties of discretized systems T o employ the discrete-time result dev elop ed in Section 2 , we here conv ert the sampled-data system to a discretized system and then obtain the prop erties of the discretized system. First, we recall the discrete-time dynamics of the plant combined with the zero-order hold and the sampler. Define A τ := T τ ∈ L ( X ) . By the admissibilit y of B , the op erator B τ : L 2 ([0 , τ ] , C p ) → X defined by B τ g := Z τ 0 T t B g ( τ − t ) dt ∀ g ∈ L 2 ([0 , τ ] , C p ) 26 Masashi W ak aiki, Hideki Sano satisfies B τ ∈ L ( L 2 ([0 , τ ] , C p ) , X ). Similarly , by the admissibility of C , the op erator C τ : X → C p defined b y C τ ζ := Z τ 0 w ( t ) C Λ T t ζ dt ∀ ζ ∈ X satisfies C τ ∈ L ( X, C p ). W e define the op erator D τ : L 2 ([0 , τ ] , C p ) → C p b y D τ g := Z τ 0 w ( t )( Gg )( t ) dt ∀ g ∈ L 2 ([0 , τ ] , C p ) , whic h satisfies D τ ∈ L L 2 ([0 , τ ] , C p ) , C p . F or simplicity of notation , we set B τ ψ := B τ ψ 1 [0 ,τ ] , D τ ψ := D τ ψ 1 [0 ,τ ] ∀ ψ ∈ C p . Lemma 3.5 (Lemma 2 of [ 25 ]) L et u = H τ f + g , wher e f ∈ F ( Z + , C p ) and g ∈ L 2 loc ( R + , C p ) , and let x 0 ∈ X . Set x ( t ) as in ( 3.2 ) . Then x ( k + 1) τ = A τ x ( k τ ) + B τ f ( k ) + B τ L kτ g ( S τ y )( k ) = C τ x ( k τ ) + D τ f ( k ) + D τ L kτ g , wher e L kτ g ∈ L 2 ([0 , τ ] , C p ) is define d by ( L kτ g )( t ) = g ( k τ + t ) for al l t ∈ [0 , τ ] . Remark 3.6 Throughout this section, we exploit the discretized system in Lemma 3.5 . Another approach for the analysis and synthesis of sampled-data systems is to lift the plant and then apply a discrete-time technique for the lifted discrete-time plan t. This lifting approach is well established for finite- dimensional systems and has the adv an tage that one can treat the in tersample b eha vior of sampled-data systems in a unified, time-in v ariant fashion; see, e.g., [ 5 , 52 , 54 ]. There are tw o ma jor reasons why we do not use the lifting approach in this study . First, our problem, output regulation for constant reference and disturbance signals, is so simple that w e do not need to analyze in tersample b eha viors of sampled-data systems by the lifting approach. Second, the transfer function of the lifted system is an op erator-v alued function, and hence the discrete-time results developed in Section 2 is not applicable. This is b ecause, to apply the Nev anlinna-Pic k interpolation problem, we consider in Section 2 discrete-time systems whose transfer function is matrix-v alued. W e pro vide t w o lemmas on the discretized system. These lemmas will b e used to guarantee that the assumptions h a 1 i – h a 7 i introduced in Section 2 are satisfied for the discretized system. Define A + τ := T + τ = A τ | X + , B + τ := Π B τ , C + τ := C τ | X + A − τ := T − τ = A τ | X − , B − τ := ( I − Π ) B τ , C − τ := C τ | X − and D + τ : L 2 ([0 , τ ] , C p ) → C p b y D + τ g := Z τ 0 w ( t )( G + g )( t ) dt ∀ g ∈ L 2 ([0 , τ ] , C p ) . Sampled-data Output Regulation of Unstable W ell-p osed Systems 27 F or ψ ∈ C p , w e also set B + τ ψ := B + τ ( ψ 1 [0 ,τ ] ) , B − τ ψ := B − τ ( ψ 1 [0 ,τ ] ) , D + τ ψ := D + τ ( ψ 1 [0 ,τ ] ) . Let η ∈ e τ ω ( T − ) , 1 . On E η ∩ % ( A τ ), we define the transfer function G τ of the discretized system b y G τ ( z ) := C τ ( z I − A τ ) − 1 B τ + D τ . (3.11) The first lemma pro vides a prop erty of the resolven t set of A τ . Lemma 3.7 If h b 1 i , h b 3 i , h b 4 i , and h b 6 i hold, then 1 ∈ % ( A τ ) . Pr o of Since X + and X − are A τ -in v ariant, it is enough to sho w that 1 ∈ % ( A + τ ) ∩ % ( A − τ ). By h b 1 i , we obtain 0 ∈ % ( A + ). T ogether with h b 6 i , this yields 2 `π i/τ 6∈ σ ( A + ) for ev ery ` ∈ Z . By the sp ectral mapping theorem, σ e τ A + = e τ σ ( A + ) . (3.12) Therefore, 1 6∈ σ e τ A + = σ ( A + τ ). On the other hand, h b 4 i leads to the p ow er stabilit y of A − τ , and hence 1 ∈ % ( A − τ ). This completes the pro of u t The second lemma gives a relationship betw een the transfer functions of the original con tinuous-time system and the discretized system. This result will b e used to verify the assumption h a 2 i on the discretized system as well as to obtain δ ∗ in ( 2.14 ). Lemma 3.8 If h b 1 i , h b 3 i , and h b 4 i hold, then G τ (1) = G (0) . Pr o of Define G + ( s ) := C + ( sI − A + ) − 1 B + , G − ( s ) := G ( s ) − G + ( s ) . Clearly , G + is the transfer function of a finite-dimensional system with gener- ating matrices ( A + , B + , C + ) and input-output op erator G + . By Lemma 3.4 , G − is the transfer function of the exp onentially stable well-posed system with generating op erators ( A − , B − , C − ) and input-output op erator G − . W e first show that G + (0) ψ = − C + τ ( A + ) − 1 B + ψ + D + τ ψ ∀ ψ ∈ C p , (3.13) where A + is in vertible b y h b 1 i . Since if g ( t ) ≡ ψ ∈ C p , then ( G + g )( t ) = C + ( e A + t − I )( A + ) − 1 B + ψ , it follo ws from R τ 0 w ( t ) dt = 1 that D + τ ψ = C + τ ( A + ) − 1 B + ψ − C + ( A + ) − 1 B + ψ ∀ ψ ∈ C p . Th us, ( 3.13 ) holds. 28 Masashi W ak aiki, Hideki Sano Since T − is exp onentially stable by h b 4 i , A − is b oundedly inv ertible. Next w e shall prov e that G − (0) ψ = − C − τ ( A − ) − 1 B − ψ + D τ ψ − D + τ ψ ∀ ψ ∈ C p . (3.14) By definition, D τ g − D + τ g = Z τ 0 w ( t )( G − g )( t ) dt ∀ g ∈ L 2 ([0 , τ ] , C p ) . Similarly to ( 3.4 ), w e obtain ( G − g )( t ) = ( C − ) Λ Z t 0 T − s B − g ( t − s ) ds + ( A − ) − 1 B − g ( t ) + G − (0) g ( t ) ∀ g ∈ L 2 loc ( R + , C p ) , a . e . t ≥ 0 , Using Z t 0 T − s B − ψ ds = T − t ( A − ) − 1 B − ψ − ( A − ) − 1 B − ψ ∀ ψ ∈ C p , and R τ 0 w ( t ) dt = 1, w e obtain Z τ 0 w ( t ) G − ( ψ 1 [0 ,τ ] ) ( t ) dt = Z τ 0 w ( t )( C − ) Λ T − t ( A − ) − 1 B − ψ dt + G − (0) ψ for ev ery ψ ∈ C p . By ( 3.10 ), D τ ψ − D + τ ψ = Z τ 0 w ( t ) C Λ T t ( A − ) − 1 B − ψ dt + G − (0) ψ = C − τ ( A − ) − 1 B − ψ + G − (0) ψ ∀ ψ ∈ C p , and ( 3.14 ) holds. By definition G τ ( z ) ψ = C + τ ( z I − A + τ ) − 1 B + τ ψ + C − τ ( z I − A − τ ) − 1 B − τ ψ + D τ ψ for every ψ ∈ C p and every z ∈ E η ∩ % ( A τ ) with η ∈ e τ ω ( T − ) , 1 . Combining ( 3.13 ), ( 3.14 ), and B + τ ψ = ( A + τ − I )( A + ) − 1 B + ψ , B − τ ψ = ( A − τ − I )( A − ) − 1 B − ψ ∀ ψ ∈ C p , w e obtain G τ (1) ψ = C + τ ( I − A + τ ) − 1 B + τ ψ + C − τ ( I − A − τ ) − 1 B − τ ψ + D τ ψ = − C + τ ( A + ) − 1 B + ψ − C − τ ( A − ) − 1 B − ψ + D τ ψ = ( G + (0) − D + τ ) ψ + ( G − (0) − D τ + D + τ ) ψ + D τ ψ = G + (0) ψ + G − (0) ψ = G (0) ψ ∀ ψ ∈ C p . Th us we obtain G τ (1) = G (0). u t Sampled-data Output Regulation of Unstable W ell-p osed Systems 29 3.5 Output regulation b y a finite-dimensional digital controller Using Theorem 2.5 , here w e present tw o results on sampled-data output regu- lation for constant reference and disturbance signals. First, we show that the output con verges to the constant reference signal in the “energy” sense. Next, w e consider sampled-data systems with smoothing precomp ensators. The out- put of such a sampled-data system is contin uous under a certain regularity condition on the initial states. Hence we can pro ve that the output exponen- tially con verges to the constant reference signal in the usual sense. The following lemma, whic h is a part of Prop osition 3 in [ 25 ], connects the p o wer stability of the discretized system and the exponential stabilit y of the sampled-data system. Lemma 3.9 (Prop osition 3 in [ 25 ]) The sample d-data system ( 3.5 ) is ex- p onential ly stable if and only if the op er ator A e define d by A e := A τ B τ R − QC τ P − QD τ R (3.15) is p ower stable. Theorem 3.10 Assume that h b 1 i – h b 9 i hold. Ther e exists a finite-dimensional c ontr ol ler ( 2.2 ) that is a solution of Pr oblem 3.3 . Pr o of One can say that the constant reference and disturbance signals y ref , v ∈ C p are generated from the exosystem ( 2.3 ) with S = 1: ξ 5 ( k ) = ξ ( k ) , ξ (0) = ξ 0 ∈ C (3.16a) v ( k ) = E ξ ( k ) (3.16b) y ref ( k ) = F ξ ( k ) (3.16c) for some unkno wn constant matrices E ∈ C p × 1 and F ∈ C p × 1 . Since u = H τ y d + v 1 R + Lemma 3.5 yields the follo wing closed-lo op dynamics at sampling instants: x 5 e ( k ) = A e x e ( k ) + B e ξ 0 , x e (0) = x 0 e (3.17a) e ( k ) = C e x e ( k ) + D e ξ 0 , (3.17b) where e ( k ) := y ref − ( S τ y )( k ), x e ( k ) := x ( k τ ) x d ( k ) , x 0 e := x 0 x 0 d , A e is defined by ( 3.15 ), and B e := B τ E Q ( F − D τ E ) , C e := − C τ D τ R , D e := F − D τ E . (3.18) T o employ the discrete-time result, Theorem 2.5 , we first show that the as- sumptions in Theorem 2.5 are satisfied for the discrete-time plant ( A τ , B τ , C τ , D τ ). By Lemmas 3.7 and 3.8 , w e find that 30 Masashi W ak aiki, Hideki Sano h a1 0 i 1 ∈ % ( A τ ); h a2 0 i det G τ (1) 6 = 0. The assumption h b 3 i implies that h a3 0 i There exist subspaces X + and X − with dim X + < ∞ such that X = X + ⊕ X − . h a4 0 i A τ X + ⊂ X + and A τ X − ⊂ X − By h b 3 i – h b 8 i , the follo wing conditions hold: h a5 0 i σ ( A τ ) ∩ cl( E 1 ) consists of finitely man y eigen v alues with finite algebraic m ultiplicities, σ ( A + τ ) = σ ( A τ ) ∩ cl( E 1 ), and there exists η ∈ (0 , 1) such that σ ( A − τ ) = σ ( A τ ) ∩ C \ cl( E η ) . h a6 0 i ( A + τ , B + τ , C + τ ) is con trollable and observ able. Here w e used Prop osition 5 and Theorem 9 in [ 25 ] to see that h A 6 0 i holds. Finally we find from h b 8 i , h b 9 i , and the sp ectral mapping theorem ( 3.12 ) that h a7 0 i The zeros of det( z I − A + τ ) are simple. Th us, Theorem 2.5 shows the existence of a finite-dimensional controller that is a solution of the robust output regulation problem, Problem 2.2 , for the discrete-time plant ( A τ , B τ , C τ , D τ ) and the exosystem ( 3.16 ). The p ow er sta- bilit y of A e is equiv alent to the exp onential stability ( 3.6 ) by Lemma 3.9 . W e next show that the tracking prop ert y holds. Let x 0 ∈ X , x 0 d ∈ X d , and y ref , v ∈ C p b e given. Since A e is p ow er stable, it follows that ( I − A e ) is in vertible. By ( 3.17a ), x 5 e ( k ) − ( I − A e ) − 1 B e ξ 0 = A e x e ( k ) + ( I − ( I − A e ) − 1 ) B e ξ 0 = A e ( x e ( k ) − ( I − A e ) − 1 B e ξ 0 ) ∀ k ∈ Z + . Using again the p ow er stability of A e , we find that there exist Γ 1 > 0 and ρ ∈ (0 , 1) such that k x e ( k ) − ( I − A e ) − 1 B e ξ 0 k X × X d ≤ Γ 1 ρ k k x 0 e k X × X d + k y ref k C p + k v k C p . (3.19) Define x ∞ x ∞ d := ( I − A e ) − 1 B e ξ 0 , u ∞ := Rx ∞ d + v . As sho wn in the proof of Theorem 10 in [ 25 ], we hav e from the assumptions h b 3 i , h b 4 i , and h b 6 i that Ax ∞ + B u ∞ = 0 (3.20) and x ∞ = T t x ∞ + Z t 0 T s B u ∞ ds ∀ t ∈ [0 , τ ] . Since x ( k τ + t ) = T t x ( k τ ) + Z t 0 T s B ( R x d ( k ) + v ) ds ∀ t ∈ [0 , τ ] , ∀ k ∈ Z + , Sampled-data Output Regulation of Unstable W ell-p osed Systems 31 together with the admissibility of B (or Lemma 2.2 of [ 26 ]), ( 3.19 ) implies that there exists Γ 2 > 0 suc h that x ( k τ + t ) − x ∞ ≤ k T t k · x ( k τ ) − x ∞ + Z t 0 T s B R ( x d ( k ) − x ∞ d ) ds ≤ Γ 2 ρ k k x 0 e k X × X d + k y ref k C p + k v k C p for all t ∈ [0 , τ ] and all k ∈ Z + . Using ( 3.19 ) again, w e ha ve that for Γ 3 := k R k Γ 1 , u ( k τ + t ) − u ∞ C p ≤ Γ 3 ρ k k x 0 e k X × X d + k y ref k C p + k v k C p for all t ∈ [0 , τ ] and all k ∈ Z + . Therefore, there exist Γ 4 > 0 and α 1 < 0 such that k x − x ∞ 1 R + k L 2 α 1 + k u − u ∞ 1 R + k L 2 α 1 ≤ Γ 4 k x 0 e k X × X d + k y ref k C p + k v k C p . (3.21) Define x ∞ − := ( I − Π ) x ∞ , x 0 − := ( I − Π ) x 0 , y ∞ := G − (0) u ∞ + C + Π x ∞ . Recall that the output y can b e written in the form ( 3.9 ). Then we obtain y ( t ) − y ∞ 1 R + = y 1 ( t ) + y 2 ( t ) + y 3 ( t ) a . e . t ≥ 0 , (3.22) where y 1 := ( C − ) Λ T − x ∞ − + G − ( u ∞ 1 R + ) − G − (0) u ∞ 1 R + y 2 := ( C − ) Λ T − ( x 0 − − x ∞ − ) + G − ( u − u ∞ 1 R + ) y 3 := C + Π ( x − x ∞ 1 R + ) . By ( 3.20 ), A − x ∞ − + B − u ∞ = ( I − Π − 1 )( Ax ∞ + B u ∞ ) = 0 . Since ( 3.1 ) yields L ( G − ( u ∞ 1 R + ) − G − (0) u ∞ 1 R + )( s ) = G − ( s ) − G − (0) s u ∞ = C − ( sI − A − ) − 1 ( A − ) − 1 B − u ∞ for ev ery s ∈ C 0 , the Laplace transform of y 1 satisfies L ( y 1 )( s ) = C − ( sI − A − ) − 1 ( A − ) − 1 ( A − x ∞ − + B − u ∞ ) = 0 ∀ s ∈ C 0 . The uniqueness of the Laplace transform (see, e.g., Theorem 1.7.3 in [ 2 ]) yields y 1 ( t ) = 0 a.e. t ≥ 0. (3.23) 32 Masashi W ak aiki, Hideki Sano By the exp onential stability of T − t and the admissibility of C − , there exists Γ 5 > 0 and α 2 < 0 suc h that k y 2 k L 2 α 2 ≤ Γ 5 k x 0 − x ∞ k + k u − u ∞ 1 R + k L 2 α 2 . (3.24) By definition, there exists Γ 6 > 0 suc h that k x ∞ k ≤ Γ 6 k y ref k C p + k v k C p . (3.25) In terms of y 3 , w e obtain k y 3 k L 2 α 1 ≤ k C + Π k L ( X, C p ) · k x − x ∞ 1 R + k L 2 α 1 . (3.26) Com bining ( 3.23 )–( 3.26 ) with ( 3.22 ), we hav e that there exists Γ 7 > 0 and α 3 := max { α 1 , α 2 } < 0 suc h that k y − y ∞ 1 R + k L 2 α 3 ≤ Γ 7 k x 0 e k X × X d + k v k C p + k y ref k C p , (3.27) whic h yields Z τ 0 k y ( k τ + t ) − y ∞ k 2 C p dt → 0 ( k → ∞ ) . Since R τ 0 w ( t ) dt = 1, it follo ws that k ( S τ y )( k ) − y ∞ k C p ≤ Z τ 0 k w ( t )( y ( k τ + t ) − y ∞ ) k C p dt ≤ s Z τ 0 | w ( t ) | 2 dt · s Z τ 0 k y ( k τ + t ) − y ∞ k 2 C p dt → 0 as k → ∞ . Therefore, the sampled output S τ y con verges to y ∞ . On the other hand, the tracking prop erty and the robustness prop ert y with resp ect to exosystems of the discretized system implies that for every y ref , v ∈ C p , ( S τ y )( k ) → y ref as k → ∞ . This means that y ∞ = y ref . Thus, the trac king prop erty is obtained from ( 3.27 ). Finally , w e prov e the robustness prop ert y . Let ( P , Q, R ) b e the realiza- tion of the controller ( 2.2 ) and ( e A, e B , e C , e G ) b e the p erturb ed system no de in O s ( P , Q, R ). Define the operator e A e as in ( 3.15 ) b y using ( e A, e B , e C , e G ). By assumption, the perturb ed sampled-data system is exp onentially stable. Using Lemma 3.9 , w e find that e A e is pow er stable. Hence Theorem 2.4 sho ws that for every y ref , v ∈ C p , the sampled output S τ y of the p erturb ed plant satisfies lim k →∞ ( S τ y )( k ) = y ref . In the argumen t to obtain ( 3.27 ), we used only the w ell-p osedness of the system no de ( A, B , C , G ), the p ow er stability of A e , the assumptions h b 3 i , h b 4 i , and h b 6 i . The p erturb ed system no de ( e A, e B , e C , e G ) is w ell p osed by assumption. The p ow er stability of e A e has been already prov ed. By Proposition 3 and Theorem 9 in [ 25 ], the assumptions h b 3 i , h b 4 i , and h b 6 i hold for ( e A, e B , e C , e G ). Hence, rep eating the argument as ab ov e, we obtain the trac king prop erty of the p erturb ed sampled-data system. u t Sampled-data Output Regulation of Unstable W ell-p osed Systems 33 - Fig. 2 Sampled-data system with precomp ensator. Remark 3.11 As seen in the proof of Theorem 3.10 , the states x ( t ) and x d ( k ) exp onen tially conv erge to x ∞ and x ∞ d , resp ectiv ely , where x ∞ x ∞ d = I − A τ B τ R − QC τ I − P + QD τ R − 1 B τ v Q ( y ref − D τ v ) . Since the output y ma y not b e con tin uous, Theorem 3.10 do es not guar- an tee that y ( t ) → y ref as t → ∞ . T o address this issue, we use a smoothing stable precomp ensator Σ p of the form ˙ x p = − ax p + u p , x p (0) = x 0 p ∈ C p , (3.28) where a > 0. Consider the sampled-data system consisting of the digital con- troller ( 2.2 ), the well-posed plant ( 3.3 ), the precomp ensator ( 3.28 ), and the feedbac k law u = x p , u p = H τ y d + v 1 R + , u d = y ref 1 Z + − S τ y . Fig. 2 illustrates the sampled-data system with a precomp ensator. The new plant b Σ , which is the in terconnection of the plan t Σ and the precomp ensator Σ p , is a w ell-posed system with state space b X := X × C p , input space C p , and output space C p . The generating op erators ( b A, b B , b C ) of b Σ are given by b A := A B 0 − aI with dom( b A ) := x x p ∈ X × C p : Ax + B x p ∈ X b B := 0 I , b C x x p := C ( x − ( λI − A ) − 1 B x p ) + G ( λ ) x p ∀ x x p ∈ dom( b A ) , where λ ∈ % ( A ). The transfer function b G of b Σ is b G ( s ) := G ( s ) / ( s + a ). Theorem 3.12 If the assumptions h b 1 i – h b 9 i hold, then ther e exists a finite- dimensional c ontr ol ler ( 2.2 ) that is a solution of Pr oblem 3.3 in the c ontext of the inter c onne cte d plant b Σ . F urthermor e, if a c ontr ol ler in the form ( 2.2 ) satisfies the stability pr op erty and the tr acking pr op erty in Pr oblem 3.3 for the inter c onne cte d plant b Σ , then the fol lowing c onver genc e pr op erty holds: L et x 0 d ∈ X d and v , y ref ∈ C p b e arbitr ary and let the initial states x 0 ∈ X and x 0 p ∈ C p b e such that T t 0 ( Ax 0 + B x 0 p ) ∈ X for some t 0 ≥ 0 . Then ther e exist a function y c : R + → C p and a c onstant α < 0 such that 34 Masashi W ak aiki, Hideki Sano 1. y c c oincides with the output y of b Σ for a.e. t ≥ 0 , is c ontinuous on [ t 0 , ∞ ) , and satisfies lim t →∞ ( y c ( t ) − y ref ) e − αt = 0; 2. α is indep endent of x 0 ∈ X, x 0 p ∈ C p , x 0 d ∈ X d , and y ref , v ∈ C p . Pr o of Due to Theorem 3.10 , the first assertion follows if the assumptions h b 1 i – h b 9 i are satisfied in the context of the in terconnected plan t b Σ . Among these assumptions, h b 3 i – h b 7 i hold in the context of b Σ b y Prop osition 5 and the pro of of Theorem 11 in [ 25 ]. By the definition of b A and b G , the remaining assumptions h b 1 i , h b 2 i , h b 8 i , and h b 9 i hold in the con text of b Σ . W e prov e the second assertion. Define the operator b A e as in ( 3.15 ) b y using the interconnected plant b Σ . By Lemma 3.9 , the stability prop erty implies the p o wer stabilit y of b A e . By Proposition 3 and Theorems 9 and 10 in [ 25 ], the assumptions h b 3 i , h b 4 i , and h b 6 i hold in the con text of b oth Σ and b Σ . Let x 0 d ∈ X d and v , y ref ∈ C p b e given, and let t 0 ≥ 0, x 0 ∈ X , and x 0 p ∈ C p b e suc h that T t 0 ( Ax 0 + B x 0 p ) ∈ X . It can be sho wn as in the pro of of Theorem 3.10 that there exist x ∞ ∈ X , x ∞ p ∈ C p , x ∞ d ∈ X d , b Γ > 0, and b ρ ∈ (0 , 1) such that k x ( k τ + t ) − x ∞ k + k x p ( k τ + t ) − x ∞ p k C p + k x d ( k ) − x ∞ d k X d (3.29) ≤ b Γ b ρ k k x 0 k + k x 0 p k C p + k x 0 d k X d + k y ref k C p + k v k C p ∀ t ∈ [0 , τ ) , ∀ k ∈ Z + . Similarly to ( 3.20 ), w e obtain b A x ∞ x ∞ p + b B ( R x ∞ d + v ) = 0 . (3.30) Using the pro jection Π on X given in ( 3.8 ), we define x ∞ − := ( I − Π ) x ∞ , x 0 − := ( I − Π ) x 0 , y ∞ := G − (0) x ∞ p + C + Π x ∞ . Lemma 3.4 yields y ( t ) − y ∞ 1 R + = y 1 ( t ) + y 2 ( t ) + y 3 ( t ) a . e . t ≥ 0 , where y 1 := ( C − ) Λ T − x ∞ − + G − ( x ∞ p 1 R + ) − G − (0) x ∞ p 1 R + y 2 := ( C − ) Λ T − ( x 0 − − x ∞ − ) + G − ( x p − x ∞ p 1 R + ) y 3 := C + Π ( x − x ∞ 1 R + ) . W e can sho w that y 1 ( t ) = 0 for a.e. t ≥ 0 in the same wa y as in the pro of of Theorem 3.10 . In fact, using ( 3.30 ), we obtain A − x ∞ − + B − x ∞ p = ( I − Π − 1 )( Ax ∞ + B x ∞ p ) = 0 . (3.31) Sampled-data Output Regulation of Unstable W ell-p osed Systems 35 By ( 3.1 ), L ( G − ( x ∞ p 1 R + ) − G − (0) x ∞ p 1 R + )( s ) = G − ( s ) − G − (0) s x ∞ p = C − ( sI − A − ) − 1 ( A − ) − 1 B − x ∞ p for ev ery s ∈ C 0 . Hence the Laplace transform of y 1 is giv en by L ( y 1 )( s ) = C − ( sI − A − ) − 1 ( A − ) − 1 ( A − x ∞ − + B − x ∞ p ) = 0 ∀ s ∈ C 0 . Th us we obtain y 1 ( t ) = 0 for a.e. t ≥ 0. W e next inv estigate con tin uit y and con vergence of y 2 . By Proposition 2.1 of [ 27 ], if T − t 0 A − ( x 0 − − x ∞ − ) + B − ( x 0 p − x ∞ p ) ∈ X − (3.32) and if x p − x ∞ p 1 R + ∈ L 2 β 2 ( R + , C p ) with ˙ x p ∈ L 2 β 2 ( R + , C p ) for some β 2 ∈ ( ω ( T − ) , 0), then there exists a function y 2 , c : R + → C p suc h that y 2 , c coincides with y 2 for a.e. t ≥ 0, is contin uous on [ t 0 , ∞ ), and satisfies lim t →∞ y 2 , c ( t ) e − β 2 t = 0. Since T t 0 ( Ax 0 + B x 0 p ) ∈ X b y assumption, it follows that T − t 0 ( A − x 0 − + B − x 0 p ) = T − t 0 ( I − Π − 1 )( Ax 0 + B x 0 p ) ∈ X − . This together with ( 3.31 ) yields ( 3.32 ). Let us show that x p − x ∞ p 1 R + ∈ L 2 β 2 ( R + , C p ) and ˙ x p ∈ L 2 β 2 ( R + , C p ) for some β 2 ∈ ( ω ( T − ) , 0). Recall that ˙ x p = − ax p + H τ Rx d + v 1 R + . Since ( 3.30 ) yields − ax ∞ p + R x ∞ d + v = 0 , it follo ws that ˙ x p = − a ( x p − x ∞ p 1 R + ) + H τ R ( x d − x ∞ d 1 Z + ) . By ( 3.29 ), there exists β 2 ∈ ( ω ( T − ) , 0) such that x p − x ∞ p 1 R + ∈ L 2 β 2 ( R + , C p ) and ˙ x p ∈ L 2 β 2 ( R + , C p ). Since x is contin uous, it follows that y 3 is also contin uous. Inv oking ( 3.29 ), w e ha ve that lim t →∞ y 3 ( t ) e − β 3 t = 0 for some β 3 < 0. Th us y c := y 2 , c + y 3 + y ∞ 1 R + coincides y almost ev erywhere in R + , is contin uous on [ t 0 , ∞ ), and lim t →∞ ( y c ( t ) − y ∞ ) e − αt = 0 for α := max { β 2 , β 3 } < 0. By construction, α is indep enden t of x 0 ∈ X, x 0 p ∈ C p , x 0 d ∈ X d , and y ref , v ∈ C p . Finally , w e prov e that y ref = y ∞ . Since R τ 0 w ( t ) dt = 1, it follows that, for ev ery k ∈ Z + with k τ > t 0 , ( S τ y )( k ) − y ∞ C p ≤ Z τ 0 k w ( t )( y c ( k τ + t ) − y ∞ ) k C p dt ≤ √ τ k w k L 2 (0 ,τ ) max 0 ≤ t ≤ τ k y c ( k τ + t ) − y ∞ k C p . 36 Masashi W ak aiki, Hideki Sano Therefore, lim k →∞ ( S τ y )( k ) = y ∞ . On the other hand, from the tr acking prop- ert y , it follows that k y − y ref 1 R + k L 2 < ∞ . Hence k ( S τ y )( k ) − y ref k C p ≤ Z τ 0 k w ( t )( y ( k τ + t ) − y ref ) k C p dt ≤ s Z τ 0 | w ( t ) | 2 dt · s Z τ 0 k y ( k τ + t ) − y ref k 2 C p dt → 0 as k → ∞ . Thus, y ref = y ∞ . This completes the pro of. u t 4 Application to delay systems In this section, we study sampled-data output regulation for systems with state and output dela ys. This illustrates Theorem 3.10 and the design pro cedure of finite-dimensional regulating con trollers in Section 2 . F or delay systems, the problem of output regulation has been inv estigated in [ 8 , 13 , 55 ] and the ref- erence therein. Recently , the solv ability of the output regulation problem for dela y systems with infinite-dimensional state spaces has b een characterized b y the associated regulator equations in [ 32 ]. In the studies ab ov e, con tin uous- time output regulation is considered, whereas w e here study sampled-data output regulation for delay systems, fo cusing on constan t reference and dis- turbance signals. First, the dela y system w e consider and its state-space representation are in tro duced. Next, in Section 4.1 , we decompose delay systems into a finite- dimensional unstable part and an infinite-dimensional stable part, and then appro ximate the infinite-dimensional stable part by a finite-dimensional sys- tem for the design of regulating controllers. In Section 4.2 , w e finally present a n umerical example to illustrate the prop osed design metho d. Throughout this section, w e use the same notation as in Section 3 . F or q , b q ∈ N , let h q > h q − 1 > · · · > h 1 > 0 and h q ≥ b h b q > b h b q − 1 > · · · > b h 1 ≥ 0. Consider the follo wing delay system: ˙ z ( t ) = A 0 z ( t ) + q X j =1 A j z ( t − h j ) + bu ( t ) , t ≥ 0 (4.1a) y ( t ) = b q X ` =1 c ` z ( t − b h ` ) , t ≥ 0 (4.1b) z (0) = z 0 , z ( θ ) = $ ( θ ) , θ ∈ [ − h q , 0] , (4.1c) where z ( t ) ∈ C n , u ( t ) , y ( t ) ∈ C are the state, the input, and the output of the system, resp ectively , A j ∈ C n × n , b ∈ C n × 1 , c ` ∈ C 1 × n for every j ∈ { 0 , . . . , q } and for every ` ∈ { 1 , . . . , b q } , z 0 ∈ C n , and $ ∈ L 2 [ − h q , 0] , C n . In ( 4.1 ), h 1 , . . . , h q and b h 1 , . . . , b h b q represen t the state dela y and the output delay , resp ectiv ely . W e assume that the input u satisfies u ∈ L 2 loc ( R + ). Sampled-data Output Regulation of Unstable W ell-p osed Systems 37 The state space of the delay system ( 4.1 ) is given by X = C n ⊕ L 2 [ − h q , 0] , C n with the standard inner pro duct: ζ 1 $ 1 , ζ 2 $ 2 := ( ζ 1 , ζ 2 ) C n + ( $ 1 , $ 2 ) L 2 ( − h q , 0) . The generating op erators ( A, B , C ) of the delay system ( 4.1 ) are given by A ζ $ = A 0 ζ + P q j =1 A j $ ( − h j ) d$ dθ with domain dom( A ) = ζ $ ∈ C n ⊕ W 1 , 2 [ − h q , 0] , C n : $ (0) = ζ and B s = bs 0 ∀ s ∈ C C ζ $ = b q X ` =1 c ` $ − b h ` ∀ ζ $ ∈ X 1 . The transfer function of the dela y system ( 4.1 ) is given by G ( s ) = b q X ` =1 e − b h ` s c ` ∆ ( s ) − 1 b, where ∆ ( s ) := sI − A 0 − q X j =1 A j e − h j s . The deriv ation of the generating operators and the transfer function of dela y systems can b e found, e.g., in Chapters 2–4 of [ 10 ] (for the case without output dela ys). One can see from Lemma 2.4.3 in [ 10 ] that C is admissible. Hence, Theorem 5.1 in [ 9 ] implies that the delay system ( 4.1 ) defines a w ell-p osed system. See, e.g, [ 6 , 14 ] for the well-posedness of more general delay systems. Let T b e the strongly contin uous semigroup generating A , and defin e x 1 ( t ) x 2 ( t ) := x ( t ) := T ( t ) x 0 + Z t 0 T ( t − s ) B u ( s ) ds, x 0 := z 0 $ . (4.2) It is shown in Example 3.1.9 of [ 10 ] that x 1 ( t ) = z ( t ) and x 2 ( t ) = z ( t + · ) hold for all t ≥ 0, where z is the solution of ( 4.1 ). F urthermore, z is absolutely con tinuous on [0 , ∞ ); see, e.g., Theorem 2.4.1 in [ 10 ]. Hence x ( t ) ∈ X 1 for ev ery t ≥ h q , and y is (absolutely) contin uous on [ b h b q , ∞ ). F or completeness, w e show in App endix B that y ( t ) = C Λ x ( t ) for a.e. t ≥ 0. The output y of this delay system exp onentially conv erges to a constant reference signal without a precompensator. In fact, once w e construct a con- troller that is a solution of Problem 3.3 , z ( t ) exp onentially conv erges to some z ∞ ∈ C n ; see, e.g, Remark 3.11 . Since y is contin uous on [ b h b q , ∞ ), we ha ve from the argumen t in the last paragraph of the pro of of Theorem 3.12 that y ( t ) also exp onentially conv erges to y ref = P b q ` =1 c ` z ∞ . 38 Masashi W ak aiki, Hideki Sano 4.1 Decomp osition of dela y systems into stable and unstable parts By Theorem 2.4.6 of [ 10 ], all elements of σ ( A ) are the eigenv alues of A with finite m ultiplicities, and σ ( A ) = { s ∈ C : det ∆ ( s ) = 0 } . F or every ε ∈ R , σ ( A ) ∩ cl( C − ε ) consists of finitely many isolated eigenv alues of A . Hence the assumption h b 3 i in Section 3.3 holds. W e place the follo wing assumption on the eigen v alues of A in cl( C 0 ). Assumption 4.1 The zer os, γ 1 , . . . , γ N , of det ∆ in cl( C 0 ) ar e simple. Using Lemma 2.7 , w e find that dim ker ∆ ( γ m ) = 1 for every m ∈ { 1 , . . . , N } under Assumption 4.1 . By Theorem 2.4.6 and Corollary 2.4.7 of [ 10 ], the or- der and the m ultiplicit y of the eigen v alues γ 1 , . . . , γ N of A are both one. F or m ∈ { 1 , . . . , N } , let nonzero vectors ς m , ν m ∈ C n satisfy ∆ ( γ m ) ς m = 0 and ∆ ( γ m ) ∗ ν m = 0, resp ectively . By Theorem 2.4.6 and Lemma 2.4.9 of [ 10 ], the eigen vector φ m of A corresp onding to the eigen v alue γ m and the eigenv ector ψ m of A ∗ corresp onding to the eigen v alue γ m are giv en by φ m := ς m $ m ς m , ψ m := 1 d m " ν m P q j =1 e − γ m h j 1 [ − h j , 0] $ ∗ m A ∗ j ν m # , (4.3) where $ m ( θ ) := e γ m θ , $ ∗ m ( θ ) := e γ m θ for ev ery θ ∈ [ − h q , 0] and d m := ( ς m , ν m ) C n + q X j =1 h j e − γ m h j ( A j ς m , ν m ) C n . By definition, φ m and ψ m satisfy ( φ m , ψ m ) = 1 for ev ery m ∈ { 1 , . . . , N } . In addition, since γ m ( φ m , ψ j ) = ( Aφ m , ψ j ) = ( φ m , A ∗ ψ j ) = γ j ( φ m , ψ j ) ∀ m, j ∈ { 1 , . . . , N } , it follo ws that ( φ m , ψ j ) = 0 if m 6 = j . Let Φ b e a rectifiable, closed, simple curve Φ in C enclosing an op en set that con tains σ ( A ) ∩ cl( C 0 ) in its in terior and σ ( A ) ∩ C \ cl( C 0 ) in its exterior. The sp ectral pro jection Π corresponding to σ ( A ) ∩ C \ cl( C 0 ) is defined b y Π x := 1 2 π i Z Φ ( sI − A ) − 1 xds, whic h, by Lemma 2.5.7 of [ 10 ], satisfies Π x = N X m =1 ( x, ψ m ) φ m ∀ x ∈ X. (4.4) Sampled-data Output Regulation of Unstable W ell-p osed Systems 39 Hence X + := Π X = ( N X m =1 s m φ m : s m ∈ C ∀ m ∈ { 1 , . . . , N } ) and for s, s 1 , . . . , s N ∈ C , the op erators A + , B + , C + , and T + defined as in Section 3.3 satisfy A + N X m =1 s m φ m ! = N X m =1 s m γ m φ m B + s = s N X m =1 ( b, ν m ) C n d m φ m C + N X m =1 s m φ m ! = N X m =1 s m b q X ` =1 e − γ m b h ` c ` ς m T + t N X m =1 s m φ m ! = N X m =1 s m e γ m t φ m ∀ t ≥ 0 . W e obtain G + ( s ) := C + ( sI − A + ) − 1 B + = N X m =1 κ m s − γ m , where κ m := ( b, ν m ) C n d m b q X ` =1 e − γ m b h ` c ` ς m . F urthermore, as shown in b. of the pro of of Theorem 5.2.12 of [ 10 ], T − is exp onen tially stable. Therefore the assumption h b 4 i in Section 3.3 is satisfied. Since for every s, s 1 , . . . , s N ∈ C , the op erators ( A + τ , B + τ , C + τ ) defined as in Section 3.4 satisfy A + τ N X m =1 s m φ m ! = N X m =1 s m e γ m τ φ m B + τ s = s N X m =1 ( b, ν m ) C n d m e γ m τ − 1 γ m φ m C + τ N X m =1 s m φ m ! = N X m =1 s m Z τ 0 w ( t ) e γ m t dt b q X ` =1 e − γ m b h ` c ` ς m , it follo ws that G + τ ( z ) := C + τ ( z I − A + τ ) − 1 B + τ = N X m =1 α m z − e γ m τ , 40 Masashi W ak aiki, Hideki Sano where α m := κ m e γ m τ − 1 γ m Z τ 0 w ( t ) e γ m t dt. As in Example on pp. 1221–1223 of [ 25 ], one can construct the appro xi- mation R of G − τ = G τ − G + τ as follows. Define the input-output map G + : L 2 loc ( R + ) → L 2 loc ( R + ) b y ( G + u )( t ) := N X m =1 κ m Z t 0 e γ m ( t − s ) u ( s ) ds, whose transfer function is given by G + . Similarly , w e denote by G + τ : F ( Z + ) → F ( Z + ) the discrete-time input-output op erator asso ciated with the transfer function G + τ : ( G + τ f )( k ) := N X m =1 α m k − 1 X ` =0 e ( k − ` − 1) γ m τ f ( ` ) . A routine calculation sho ws that S τ G + H τ = G + τ + N X m =1 κ m ( β m − 1) γ m I , where β m := Z τ 0 w ( t ) e γ m t dt. This yields S τ G H τ = G + τ + N X m =1 κ m ( β m − 1) γ m I + S τ G − H τ . Note that S τ G H τ is the discrete-time input-output operator associated with the transfer function G τ . Then w e obtain G − τ = G τ − G + τ = N X m =1 κ m ( β m − 1) γ m + H τ , where H τ is the transfer function of the discrete-time input-output operator S τ G − H τ . Cho ose a rational function R ∈ H ∞ ( E 1 ) as a constan t function R ( z ) ≡ N X m =1 κ m ( β m − 1) γ m . A simple calculation giv es kH τ k L ( l 2 ( Z + ) ,L 2 ( R + )) = √ τ , kS τ k L ( L 2 ( R + ) ,l 2 ( Z + )) = k w k L 2 (0 ,τ ) . Noting that the transfer function G − = G − G + of an exp onentially stable w ell-p osed system satisfies G − ∈ H ∞ ( C 0 ), w e obtain k G − τ − R k H ∞ ( E 1 ) = k H τ k H ∞ ( E 1 ) ≤ √ τ k w k L 2 (0 ,τ ) · k G − k H ∞ ( C 0 ) . Sampled-data Output Regulation of Unstable W ell-p osed Systems 41 Th us, if k G − k H ∞ ( C 0 ) = k G − G + k H ∞ ( C 0 ) < 1 √ τ M 1 k w k L 2 (0 ,τ ) · k D + k H ∞ ( E 1 ) , (4.5) then we can design a regulating controller, where M 1 > 0 is defined as in ( 2.30 ) and N + / D + is a coprime factorization of G + τ o ver the set of rational functions in ∈ H ∞ ( E 1 ). 4.2 Numerical sim ulation In what follo ws, we consider the case q = b q = 1 A 0 = A 1 = 0 . 2, b = 1, c 1 = 1, h 1 = 1, b h 1 = 0 . 1, τ = 2, w ( t ) ≡ 1 / 2. W e first show that g ( s ) := s − A 0 − A 1 e − h 1 s = s − 0 . 2 − 0 . 2 e − s has only one zero in cl( C 0 ) in a wa y similar to Example 5.2.13 of [ 10 ]. Defin e g 1 ( s ) := s − 1 and g 2 ( s ) := 0 . 8 − 0 . 2 e − s . F or ev ery s ∈ C 0 satisfying | s | > 2, w e obtain | g 1 ( s ) | ≥ | s | − 1 > 1 and | g 2 ( s ) | ≤ 0 . 8 + 0 . 2 | e − s | ≤ 1. Therefore, | g 1 ( s ) | > | g 2 ( s ) | for ev ery s ∈ C 0 with | s | > 2. On th e other hand, for ev ery ω ∈ R , | g 1 ( iω ) | 2 = 1 + ω 2 and | g 2 ( iω ) | 2 = 0 . 68 − 0 . 32 cos ω . Hence | g 1 ( iω ) | > | g 2 ( iω ) | ∀ ω ∈ R . (4.6) Rouc he’s theorem shows that g 1 and g = g 1 + g 2 ha ve the same num b er of zeros in C 0 , where eac h zero is coun ted as man y times as its m ultiplicity . Thus, g has only one simple zero in C 0 . Moreo ver, ( 4.6 ) yields | g ( iω ) | ≥ | g 1 ( iω ) | − | g 2 ( iω ) | > 0 ω ∈ R , and hence g has no zeros on the imaginary axis. Since g ( s ) is negativ e at s = 0 and positive at s = + ∞ , it follo ws that the zero of g in cl( C 0 ) is real. Th us, the generator A has only an eigen v alue at s = γ ≈ 0 . 3421 in cl( C 0 ), and the assumption h b 1 i in Section 3.3 is satisfied. The transfer function of the dela y system ( 4.1 ) is given by G ( s ) = e − b h 1 s s − A 0 − A 1 e − h 1 s . Since G (0) = − 1 A 0 + A 1 = − 5 2 6 = 0 , it follo ws that the assumption h b 2 i in Section 3.3 holds. By ( 4.3 ), the eigenv ec tors φ of A and ψ of A ∗ corresp onding to the eigen- v alue γ are given by φ = 1 $ γ , ψ = 1 d 1 A 1 e − γ h 1 /$ γ , 42 Masashi W ak aiki, Hideki Sano where $ γ ( θ ) := e γ θ for every θ ∈ [ − h 1 , 0] and d := 1 + A 1 h 1 e − γ h 1 . Then φ and ψ satisfy ( φ, ψ ) = 1. It follows from ( 4.4 ) that the pro jection Π is giv en b y Π x = ( x, ψ ) φ ∀ x ∈ X . Hence, X + = Π X = { sφ : s ∈ C } . F or s ∈ C , A + ( sφ ) = sγ φ, B + s = s d φ, C + ( sφ ) = se − γ b h 1 and T + t ( sφ ) = se γ t φ ∀ t ≥ 0 . In the previous subsection, we ha ve sho w ed that the assumptions h b 3 i and h b 4 i in Section 3.3 hold. The assumptions h b 5 i – h b 9 i are clearly satisfied. The transfer function of the unstable part of G is given by G + ( s ) = κ s − γ where κ := e − γ b h 1 d . Similarly , the transfer function of the unstable part of G τ is G + τ ( z ) = α z − e γ τ , where α := κ e γ τ − 1 γ Z τ 0 w ( t ) e γ t dt. Define N + ( z ) := α z − a , D + ( z ) := z − e γ τ z − a , where a := 0 . 9. Then N + / D + is a coprime factorization of G + τ o ver the set of rational func- tions in H ∞ ( E 1 ). Using Lemma 3.8 , w e obtain δ ∗ := 1 D + (1) G τ (1) = 1 D + (1) G (0) = (1 − a )( A 0 + A 1 ) e γ τ − 1 . There exists a rational function Y + ∈ H ∞ ( E 1 ) satisfying interpolation condi- tions ( 2.18 ) and the norm condition k Y + k H ∞ ( E 1 ) < 1 =: M . Cho ose a rational function R ∈ H ∞ ( E 1 ) as a constan t function R ( z ) ≡ κ ( β − 1) γ , where β := Z τ 0 w ( t ) e γ t dt, and let us next sho w that ( 4.5 ) is satisfied. A n umerical computation sho ws that k G − G + k H ∞ ( C 0 ) = sup ω ∈ R | G ( iω ) − G + ( iω ) | < 0 . 1 . Define M 1 := max { 2 δ ∗ , M } = M = 1 . Since k w k L 2 (0 ,τ ) = 1 / √ τ for the case w ( t ) ≡ 1 /τ , it follo ws that 1 √ τ M 1 k w k L 2 (0 ,τ ) k D + k H ∞ ( E 1 ) = 1 M 1 k D + k H ∞ ( E 1 ) ≈ 0 . 1018 , Sampled-data Output Regulation of Unstable W ell-p osed Systems 43 150 100 5 0 0 0 15 10 5 - 5 T ime Fig. 3 Time resp onse of y with y ref = 1. 150 100 5 0 0 4 0 - 2 2 - 8 - 6 - 4 T ime Fig. 4 Time resp onse of u with y ref = 1. and hence ( 4.5 ) is satisfied. Define a rational function Y + ∈ H ∞ ( E 1 ) b y Y + ( z ) := 0 . 7712 z − 0 . 7602 z 2 − 0 . 7328 z , whic h satisfies the interpolation conditions ( 2.18 ), ( 2.23 ) and the norm condi- tion k Y + k H ∞ ( E 1 ) < M 1 . By the construction used in the pro of of Theorem 2.5 , a minimal realization of the digital con troller K ( z ) := ( Y + D + )( z ) 1 − ( N + + D + R )( z ) Y + ( z ) = 0 . 7712 z − 0 . 7602 z 2 − 0 . 4814 z − 0 . 5186 is a solution of Problem 3.3 . Figs. 3 and 4 illustrate the time responses of the output y and the input u , resp ectiv ely . The initial states of the plant and the con troller are c hosen as z 0 = 2, $ ( θ ) ≡ 2, and x 0 d = 0 0 ∗ , resp ectively . The reference and disturbance signals are giv en by y ref = 1 and v ∈ {− 1 , 0 , 1 } , resp ectively . 5 Conclusion W e hav e studied the sampled-data output regulation problem for infinite- dimensional systems with constant reference and disturbance signals. Our 44 Masashi W ak aiki, Hideki Sano main contribution is to obtain a sufficient condition for this con trol prob- lem to b e solv able with a finite-dimensional controller. T o this end, we ha ve prop osed a design metho d of finite-dimensional con trollers for the robust out- put regulation of infinite-dimensional discrete-time systems. In the con troller design, the discrete-time output regulation problem has been reduced to the Nev anlinna-Pick in terp olation problem. W e hav e also applied the obtained re- sults to systems with state and output delays. In future w ork on sampled-data output regulation, we are planning to design generalized hold functions for infinite-dimensional systems with general reference and disturbance signals. A Nev anlinna-Pick in terp olation problem In this section, we obtain a necessary and sufficient condition for the solv- abilit y of the in terpolation problem to which we reduce the design problem of regulating con trollers. In the process, w e also show how to construct a so- lution of the in terp olation problem. Although we consider H ∞ ( E 1 , C p × q ) in Section 2 , the standard theory of the Nev anlinna-Pick interpolation problem uses H ∞ ( D , C p × q ). Hence, it is conv enient to map E 1 to D via the bilinear transformation ϕ : E 1 → D : z 7→ 1 /z . In Section A.1 , we recall basic facts on the Nev anlinna-Pic k interpolation problem only with conditions on the interior D . Section A.2 is devoted to solving the Nev anlinna-Pick interpolation problem with conditions on b oth the interior D and the boundary T . As in [ 30 , 48 ], w e transform this problem in to the Nev anlinna-Pic k in terpolation problem only with conditions on the b oundary T , whic h is alwa ys solv able. A.1 In terp olation problem only with interior conditions First we consider interpolation problems only with interior in terp olation con- ditions. Problem A.1 (Chapter 18 in [ 4 ], Section I I in [ 21 ]) Supp ose that α 1 , . . . , α n ∈ D ar e distinct. L et ve ctor p airs ( ξ ` , η ` ) ∈ C p × C q satisfy k ξ ` k C p > k η ` k C q ∀ ` ∈ { 1 , . . . , n } . (A.1) Find Φ ∈ H ∞ ( D , C p × q ) such that k Φ k H ∞ ( D ) < 1 and ξ ∗ ` Φ ( α ` ) = η ∗ ` ∀ ` ∈ { 1 , . . . , n } . W e call this problem the Nevanlinna-Pick interp olation pr oblem with n interp olation data ( α ` , ξ ` , η ` ) n ` =1 . The solv ability of Problem A.1 can be char- acterized b y the so-called Pick matrix. Sampled-data Output Regulation of Unstable W ell-p osed Systems 45 Theorem A.2 (Theorem 18.2.3 in [ 4 ], Theorem 2 in [ 21 ]) Consider Pr oblem A.1 . Define the Pick matrix P by P := P 1 , 1 · · · P 1 ,n . . . . . . P n, 1 · · · P n,n , wher e P j,` := ξ ∗ j ξ ` − η ∗ j η ` 1 − α j α ` ∀ j, ` ∈ { 1 , . . . , n } . Pr oblem A.1 is solvable if and only if P is p ositive definite. Let us next introduce an algorithm to construct a solution of Problem A.1 . T o this end, define B := { E ∈ C p × q : k E k C p × q < 1 } . Let I p and I q b e the identit y matrix with dimension p and q , resp ectively . F or a matrix E ∈ B , define A ( E ) := ( I p − E E ∗ ) − 1 / 2 , B ( E ) := − ( I p − E E ∗ ) − 1 / 2 E (A.2a) C ( E ) := − ( I q − E ∗ E ) − 1 / 2 E ∗ , D ( E ) := ( I q − E ∗ E ) − 1 / 2 , (A.2b) where M − 1 / 2 denotes the inv erse of the Hermitian square ro ot of a p ositive definite matrix M . Define the maps U E and V E b y U E : C p × C q → C p : ( ξ , η ) 7→ A ( E ) ξ + B ( E ) η V E : C p × C q → C q : ( ξ , η ) 7→ C ( E ) ξ + D ( E ) η . The mapping T E in the lemma b elo w is useful for solving Problem A.1 . Lemma A.3 (Lemma 6.5.10 in [ 47 ]) F or a matrix E ∈ B , define the ma- tric es A ( E ) , B ( E ) , C ( E ) , and D ( E ) by ( A.2 ) . The mapping T E : B → B : X 7→ A ( E ) X + B ( E ) C ( E ) X + D ( E ) − 1 (A.3) is wel l-define d and bije ctive. A routine calculation sho ws that the inv erse of T E is giv en by T − 1 E ( Y ) = A ( E ) − Y C ( E ) − 1 Y D ( E ) − B ( E ) = A ( E ) Y − B ( E ) − C ( E ) Y + D ( E ) − 1 . (A.4) Lemma A.4 (Lemma 1 in [ 21 ]) Consider Pr oblem A.1 with n interp olation data ( α ` , ξ ` , η ` ) n ` =1 . Set E := ξ 1 η ∗ 1 / k ξ 1 k 2 C p and define A ( E ) , B ( E ) , C ( E ) , and D ( E ) as in ( A.2 ) . Define also ν := U E ( ξ 1 , η 1 ) and κ ( z ) := ( | α 1 | α 1 z − α 1 1 − α 1 z if α 1 6 = 0 z if α 1 = 0 , X := I p + ( κ − 1) ν ν ∗ k ν k 2 C p . (A.5) Pr oblem A.1 with n interp olation data ( α ` , ξ ` , η ` ) n ` =1 is solvable if and only if Pr oblem A.1 with n − 1 interp olation data α ` , X ( α ` ) ∗ U E ( ξ ` , η ` ) , V E ( ξ ` , η ` ) n ` =2 (A.6) 46 Masashi W ak aiki, Hideki Sano is solvable. Mor e over, if Φ n − 1 is a solution of the pr oblem with n − 1 interp o- lation data given in ( A.6 ) , then Φ n := T − E ( X Φ n − 1 ) = A ( E ) X Φ n − 1 − B ( E ) − C ( E ) X Φ n − 1 + D ( E ) − 1 (A.7) is a solution Φ n of the original pr oblem with n interp olation data ( α ` , ξ ` , η ` ) n ` =1 . The iterativ e algorithm derived from Lemma A.4 is called the Schur- Nevanlinna algorithm . Lemma A.4 also sho ws that if the problem is solv able, then there exist alw ays solutions whose elements are rational functions. Note that ν given in Lemma A.4 is nonzero. In fact, since k ξ 1 k C p > k η 1 k C q , it follo ws that A ( E ) − 1 ν = ξ 1 − E η 1 = ξ 1 − k η 1 k 2 C q k ξ 1 k 2 C p ξ 1 6 = 0 , and hence ν 6 = 0. F urthermore, the matrix X defined by ( A.5 ) satisfies X ( λ ) − 1 = X ( λ ) ∗ for all λ ∈ T and k X ( z ) k C p × p < 1 for all z ∈ D . A.2 In terp olation problem with b oth interior and b oundary conditions W e next study in terp olation problems with both in terior and boundary con- ditions. Problem A.5 Supp ose that α 1 , . . . , α n ∈ D and λ 1 , . . . , λ m ∈ T ar e distinct. Consider ve ctor p airs ( ξ ` , η ` ) ∈ C p × C q for ` ∈ { 1 , . . . , n } and matric es F j , G j ∈ C p × q for j ∈ { 1 , . . . , m } , and supp ose that k ξ ` k C p > k η ` k C q ∀ ` ∈ { 1 , . . . , n } (A.8a) k F j k C p × q < 1 ∀ j ∈ { 1 , . . . , m } . (A.8b) Find a r ational function Φ ∈ H ∞ ( D , C p × q ) such that k Φ k H ∞ ( D ) < 1 and ξ ∗ ` Φ ( α ` ) = η ∗ ` ∀ ` ∈ { 1 , . . . , n } (A.9a) Φ ( λ j ) = F j , Φ 0 ( λ j ) = G j ∀ j ∈ { 1 , . . . , m } . (A.9b) Problem A.5 is called the Nevanlinna-Pick interp olation pr oblem with inte- rior interp olation data ( α ` , ξ ` , η ` ) n ` =1 and b oundary interp olation data ( λ j , F j , G j ) m j =1 . The scalar-v alued case p = q = 1 with more general in terp olation conditions has b een studied in [ 30 ]. The following theorem implies that the solv ability of Problem A.5 dep ends only on its in terior interpolation data. Theorem A.6 Pr oblem A.5 with interior interp olation data ( α ` , ξ ` , η ` ) n ` =1 and b oundary interp olation data ( λ j , F j , G j ) m j =1 is solvable if and only if Pr ob- lem A.1 with interp olation data ( α ` , ξ ` , η ` ) n ` =1 is solvable. T o solve Problem A.5 , we transform it to the follo wing problem with b ound- ary conditions only: Sampled-data Output Regulation of Unstable W ell-p osed Systems 47 Problem A.7 Supp ose that λ 1 , . . . , λ m ∈ T ar e distinct. Consider matric es F j , G j ∈ C p × q for j ∈ { 1 , . . . , m } , and supp ose that k F j k C p × q < 1 ∀ j ∈ { 1 , . . . , m } . (A.10) Find a r ational function Φ ∈ H ∞ ( D , C p × q ) such that k Φ k H ∞ ( D ) < 1 and Φ ( λ j ) = F j , Φ 0 ( λ j ) = G j ∀ j ∈ { 1 , . . . , m } . This problem is referred to as the b oundary Nevanlinna-Pick interp olation pr oblem with interp olation data ( λ j , F j , G j ) m j =1 . The condition ( A.10 ) is neces- sary for the solv ability for Problem A.7 , and the lemma b elow sho ws that the condition ( A.10 ) is also sufficien t. W e can pro ve the sufficiency b y extending the Sc hur-Nev anlinna algorithm in Lemma A.4 . Lemma A.8 Pr oblem A.7 is always solvable. Pr o of Consider Problem A.7 with interpolation data ( λ j , F j , G j ) m j =1 . W e first find m − 1 interpolation data suc h that if Problem A.7 with these m − 1 data is solv able, then the original problem with m interpolation data ( λ j , F j , G j ) m j =1 is also solv able. T o that purpose, w e extend the technique dev eloped in [ 30 ] for the scalar-v alued case. Define A := A ( F 1 ), B := B ( F 1 ), C := C ( F 1 ), and D := D ( F 1 ) as in ( A.2 ). F or > 0, set κ ( z ) := 1 λ 1 z − λ 1 (1 + ) − λ 1 z b F 1 := λ 1 ( I p − F 1 F ∗ 1 ) − 1 / 2 G 1 ( I q − F ∗ 1 F 1 ) − 1 / 2 and b F j := 1 κ ( λ j ) T F 1 ( F j ) b G j := 1 κ ( λ j ) ( A − κ ( λ j ) b F j C ) G j ( C F j + D ) − 1 − κ 0 ( λ j ) κ ( λ j ) b F j for j ∈ { 2 , . . . , m } . Let us show that there exists > 0 such that k b F j k C p × q < 1 ∀ j ∈ { 1 , . . . , m } . (A.11) By definition, k b F 1 k C p × q ≤ k G 1 k C p × q · ( I p − F 1 F ∗ 1 ) − 1 / 2 C p × p · ( I q − F ∗ 1 F 1 ) − 1 / 2 C q × q , and hence if < 1 k G 1 k C p × q · ( I p − F 1 F ∗ 1 ) − 1 / 2 C p × p · ( I q − F ∗ 1 F 1 ) − 1 / 2 C q × q , (A.12) 48 Masashi W ak aiki, Hideki Sano then k b F 1 k C p × q < 1. Let j ∈ { 2 , . . . , m } b e given. W e obtain k b F j k C p × q ≤ 1 + | λ j − λ 1 | k T F 1 ( F j ) k C p × q . (A.13) Since F j ∈ B , it follows that k T F 1 ( F j ) k C p × q < 1 by Lemma A.3 . If we choose > 0 so that < min j =2 ,...,m | λ j − λ 1 | 1 k T F 1 ( F j ) k C p × q − 1 , (A.14) then k b F j k C p × q < 1 for every j ∈ { 2 , . . . , m } . Th us, we obtain the desired inequalit y ( A.11 ) for > 0 satisfying ( A.12 ) and ( A.14 ). Assume that there exists a rational solution Ψ m − 1 ∈ H ∞ ( D , C p × q ) suc h that k Φ m − 1 k H ∞ ( D ) < 1 (A.15a) Ψ m − 1 ( λ j ) = b F j ∀ j ∈ { 1 , . . . , m } (A.15b) Ψ 0 m − 1 ( λ j ) = b G j ∀ j ∈ { 2 , . . . , m } (A.15c) W e s hall show that Ψ m := T − 1 F 1 ( κ Ψ m − 1 ) is a solution of the original problem with m interpolation data ( λ j , F j , G j ) m j =1 . By definition, Ψ m is rational. Since k κ k H ∞ ( D ) < 1 and k Ψ m − 1 k H ∞ ( D ) < 1, it follo ws that κ ( z ) Ψ m − 1 ( z ) ∈ B ∀ z ∈ cl( D ) . T ogether with this, Lemma A.3 yields Ψ m ∈ H ∞ ( D , C p × q ) and k Ψ m k H ∞ ( D ) < 1. W e no w pro ve that Ψ m satisfies the in terp olation conditions Ψ m ( λ j ) = F j and Ψ 0 m ( λ j ) = G j for every j ∈ { 1 , . . . , m } . F or the case j = 1, κ ( λ 1 ) = 0 yields Ψ m ( λ 1 ) = T − 1 F 1 κ ( λ 1 ) Ψ m − 1 ( λ 1 ) = F 1 . By ( A.4 ), we obtain ( A − κ Ψ m − 1 C ) Ψ m = κ Ψ m − 1 D − B , whic h implies ( κ Ψ 0 m − 1 + κ 0 Ψ m − 1 )( C Ψ m + D ) = ( A − κ Ψ m − 1 C ) Ψ 0 m . (A.16) Therefore, Ψ 0 m ( λ 1 ) = κ 0 ( λ 1 ) A − 1 b F 1 ( C F 1 + D ) . Since κ 0 ( z ) = 1 λ 1 (1 + ) − λ 1 z 2 , Sampled-data Output Regulation of Unstable W ell-p osed Systems 49 it follo ws that κ 0 ( λ 1 ) = 1 / ( λ 1 ). Using A − 1 = ( I p − F 1 F ∗ 1 ) 1 / 2 , C F 1 + D = ( I q − F ∗ 1 F 1 ) 1 / 2 , w e derive Ψ 0 m ( λ 1 ) = G 1 . F or j ∈ { 2 , . . . , m } , we hav e by the definition of b F j that, Ψ m ( λ j ) = T − 1 F 1 ( κ ( λ j ) b F j ) = T − 1 F 1 T F 1 ( F j ) = F j . Using ( A.16 ) again, we obtain κ ( λ j ) b G j + κ 0 ( λ j ) b F j = ( A − κ ( λ j ) b F j C ) Ψ 0 m ( λ j )( C F j + D ) − 1 . By the definition of b G j , w e find that Ψ 0 m ( λ j ) = G j ∀ j ∈ { 2 , . . . , m } . Th us Φ m is a solution of the original problem with m interpolation conditions. If w e apply this pro cedure again to the resulting in terp olation problem, i.e., the problem of finding a rational solution Ψ m − 1 ∈ H ∞ ( D , C p × q ) suc h that the conditions given in ( A.15 ) hold, then the in terp olation condition at z = λ 1 is remo ved. Therefore, Problem A.7 with m in terp olation data can be reduced to Problem A.7 with m − 1 interpolation data. Contin uing in this w ay , we finally obtain Problem A.7 with no in terp olation conditions, which alwa ys admits a solution. Th us Problem A.7 is alwa ys solv able. u t By Lemmas A.4 and A.8 , w e obtain a pro of of Theorem A.6 . Pr o of (of The or em A.6 ) The necessity is straightforw ard. W e prov e the suf- ficiency . T o this end, it is enough to sho w that the following problem alw ays has a solution: Problem A.9 Assume that Pr oblem A.1 with n interior interp olation data ( α ` , ξ ` , η ` ) n ` =1 is solvable and that k F j k C p × q < 1 for every j ∈ { 1 , . . . , m } . Find a solution of Pr oblem A.5 with n interior interp olation data ( α ` , ξ ` , η ` ) n ` =1 and m b oundary interp olation data ( λ j , F j , G j ) m j =1 . Supp ose that Problem A.1 with n interior in terp olation data ( α ` , ξ ` , η ` ) n ` =1 is solv able. Define the matrix E and the function X as in Lemma A.4 . Then this lemma sho ws that Problem A.1 with n − 1 interior interpolation data α ` , X ( α ` ) ∗ U E ( ξ ` , η ` ) , V E ( ξ ` , η ` ) n ` =2 (A.17) is solv able. Set A := A ( E ), B := B ( E ), C := C ( E ), and D := D ( E ) as in ( A.2 ). F or j ∈ { 1 , . . . , m } , define also b F j := X ( λ j ) − 1 T − 1 − E ( F j ) b G j := X ( λ j ) − 1 ( A + F j C ) − 1 G j ( − C X ( λ j ) b F j + D ) − X ( λ j ) − 1 X 0 ( λ j ) b F j . 50 Masashi W ak aiki, Hideki Sano Since X ( λ j ) − 1 = X ( λ j ) ∗ for every j ∈ { 1 , . . . , m } , we obtain k X ( λ j ) − 1 k C p × p = 1 and hence k b F j k C p × p < 1 for ev ery j ∈ { 1 , . . . , m } . Supp ose that Φ n − 1 is a solution of Problem A.5 with n − 1 in terior interpolation data giv en in ( A.17 ) and m b oundary interpolation data ( λ j , b F j , b G j ) m j =1 . Then Φ n := T − E ( X Φ n − 1 ) is a solution of Problem A.5 with n in terior in terp olation data ( α ` , ξ ` , η ` ) n ` =1 and m b oundary interpolation data ( λ j , F j , G j ) m j =1 . In fact, Lemma A.4 shows that Φ n satisfies k Φ n k H ∞ ( D ) < 1 and ξ ∗ ` Φ n ( α ` ) = η ∗ ` for every ` ∈ { 1 , . . . , n } . It remains to sho w that the b oundary conditions hold. W e obtain Φ n ( λ j ) = T − E X ( λ j ) b F j = T − E T − 1 − E ( F j ) = F j ∀ j ∈ { 1 , . . . , m } . By the definition of T − E , w e obtain Φ n ( − C X Φ n − 1 + D ) = ( AX Φ n − 1 − B ) , and hence Φ 0 n ( − C X Φ n − 1 + D ) = ( A + Φ n C )( X Φ n − 1 ) 0 . This yields Φ 0 n ( λ j ) = ( A + F j C )( X ( λ j ) b G j + X 0 ( λ j ) b F j )( − C X ( λ j ) b F j + D ) − 1 = G j . Th us, we can reduce Problem A.9 with n interior data to that with n − 1 in terior data. Con tin uing in this wa y , we reduce Problem A.5 to Problem A.7 , whic h is alwa ys solv able by Lemma A.8 . This completes the pro of. u t In the construction of regulating controllers in Section 2 , a rational function Y + ∈ H ∞ ( E 1 , C p × p ) needs to satisfy the interpolation condition Y + ( ∞ ) = 0. Its coun terpart in H ∞ ( D , C p × p ) under the transformation ϕ : E 1 → D : z 7→ 1 /z is giv en b y the interpolation condition ( Y + ◦ ϕ − 1 )(0) = 0. Suc h a condition is excluded in Problem A.5 , but we can easily incorp orate it into the problem. Corollary A.10 Supp ose that α 1 , . . . , α n ∈ D \ { 0 } and λ 1 , . . . , λ m ∈ T ar e distinct. Consider ve ctor p airs ( ξ ` , η ` ) ∈ C p × C q for ` ∈ { 1 , . . . , n } and matri- c es F j , G j ∈ C p × q for j ∈ { 1 , . . . , m } , and supp ose that the norm c onditions ( A.8 ) ar e satisfie d. Then the fol lowing thr e e statements ar e e quivalent: 1) Ther e exists a r ational function Φ ∈ H ∞ ( D , C p × q ) such that k Φ k H ∞ ( D ) < 1 , Φ (0) = 0 , and the interp olation c onditions ( A.9a ) and ( A.9b ) hold. 2) Ther e exists a r ational function Φ ∈ H ∞ ( D , C p × q ) such that k Φ k H ∞ ( D ) < 1 , Φ (0) = 0 , and the interp olation c onditions ( A.9a ) hold. 3) The Pick matrix P define d by P := P 1 , 1 · · · P 1 ,n . . . . . . P n, 1 · · · P n,n , wher e P j,k := α j α ` ξ ∗ j ξ ` − η ∗ j η ` 1 − α j α ` ∀ j, ` ∈ { 1 , . . . , n } is p ositive definite. Sampled-data Output Regulation of Unstable W ell-p osed Systems 51 Pr o of By a straigh tforw ard calculation, we hav e the follo wing fact: A ratio- nal function Φ ∈ H ∞ ( D , C p × q ) satisfies the conditions of 1) if and only if b Φ ( z ) := Φ ( z ) /z is a solution of Problem A.5 with the interior interpolation data ( α ` , α ` ξ ` , η ` ) n ` =1 and the boundary in terp olation data ( λ j , F j /λ j , G j /λ j − F j /λ 2 j ) m j =1 . This fact together with Theorem A.6 shows that 1) is true if and only if Problem A.1 with the in terp olation data ( α ` , α ` ξ ` , η ` ) n ` =1 is solv able. Hence, w e obtain 1) ⇔ 3) by Theorem A.2 . Using the fact mentioned ab ov e again, w e obtain 1) ⇔ 2). This completes the pro of. u t Remark A.11 Supp ose that the in terp olation data ha ve conjugate symmetry in Problem A.5 . In other w ords, suppose that b oth ( α, ξ , η ) and ( α, ξ , η ) are in its interior interpolation data and that ( λ, F , G ) and ( λ, F , G ) are in its b oundary interpolation data. If the in terp olation problem is solv able, then there exists a solution that is a rational function with real co efficien ts. In fact, for ev ery rational function Φ , there uniquely exist rational functions Φ R and Φ I with real co efficients such that Φ = Φ R + iΦ I . If a rational function Φ is a solution of the interpolation problem, then one can easily prov e that its real part Φ R is also a solution. Remark A.12 Let λ ∈ T . F or a vector pair ( ξ , η ) ∈ C p × C q , define a matrix F := ξ η ∗ / k ξ k 2 C p . If k ξ k C p > k η k C q , then k F k C p × q < 1. F urther, if a rational function Ψ ∈ H ∞ ( D , C p × q ) satisfies Ψ ( λ ) = F , then ξ ∗ Ψ ( λ ) = η ∗ . In this w ay , w e can transform the tangential interpolation condition ξ ∗ Ψ ( λ ) = η ∗ to the matrix-v alued in terp olation condition Ψ ( λ ) = F . This transformation is used in the design procedure of regulating controllers in Section 2 if unstable eigen v alues of A lie on the b oundary T . Moreov er, the ab ov e observ ation and Theorem A.6 indicate that for λ ∈ T and ( ξ , η ) ∈ C p × C q with k ξ k C p > k η k C q , boundary interpolation conditions of the form ξ ∗ Ψ ( λ ) = η ∗ can be also ignored when we determine the solv ability of the Nev anlinna-Pick interpolation problem. B Λ -extension of output op erator of delay systems Consider the delay system ( 4.1 ), and define x as in ( 4.2 ). The ob jective of this section is to sho w for a.e. t ≥ 0, b q X ` =1 c ` z ( t − b h ` ) = C Λ x ( t ) . (B.1) Since x ( t ) ∈ X 1 for every t ≥ h q and since C Λ ζ = C ζ for every ζ ∈ X 1 , it suffices to sho w ( B.1 ) a.e. on [0 , h q ). F or simplicity of notation, we consider the case b q = 1 and define b h := b h 1 and c := c 1 . By Lemma 2.4.5 of [ 10 ], there exists s 0 > 0 suc h that ( sI − A ) − 1 x ( t ) = g 1 ( t ) g 2 ( t ) ∀ s > s 0 , ∀ t ∈ [0 , h q ) , 52 Masashi W ak aiki, Hideki Sano where g 1 ( t ) := ∆ ( s ) − 1 z ( t ) + q X j =1 Z 0 − h j e − s ( θ + h j ) A j z ( t + θ ) dθ g 2 ( t ) ( θ ) := e sθ g 1 ( t ) − Z θ 0 e s ( θ − ν ) z ( t + ν ) dν ∀ θ ∈ [ − h q , 0] . Hence for ev ery s > s 0 and ev ery t ∈ [0 , h q ), w e obtain C s ( sI − A ) − 1 x ( t ) = sc g 2 ( t ) ( − b h ) = sc e − s b h g 1 ( t ) + Z b h 0 e − s ( b h − ν ) z ( t − ν ) dν ! . Since lim s →∞ , s ∈ R s∆ ( s ) − 1 = I and z ∈ L 1 ( − h q , h q ) , C n , Leb esgue’s dominated con vergence theorem implies that in the case b h = 0, lim s →∞ , s ∈ R sc e − s b h g 1 ( t ) + Z b h 0 e − s ( b h − ν ) z ( t − ν ) dν ! = lim s →∞ , s ∈ R sc∆ ( s ) − 1 z ( t ) + q X j =1 Z 0 − h j e − s ( θ + h j ) A j z ( t + θ ) dθ = cz ( t ) ∀ t ∈ [0 , h q ) . Th us, we obtain cz ( t − b h ) = C Λ x ( t ) for ev ery t ∈ [0 , h q ) if b h = 0. In the case b h ∈ (0 , h q ), w e obtain lim s →∞ , s ∈ R se − s b h g 1 ( t ) = 0 ∀ t ∈ [0 , h q ) . Since B ∈ L ( U, X ), it follows that x ( t ) ∈ dom( C Λ ) for a.e. t ≥ 0 and C Λ x ( t ) = lim s →∞ , s ∈ R C s ( sI − A ) − 1 x ( t ) = lim s →∞ , s ∈ R s Z b h 0 e − s ( b h − ν ) ζ ( t − ν ) dν a.e. t ≥ 0 , (B.2) where ζ := cz . F or each n ∈ N , define f n ( t ) := n Z b h 0 e − n ( b h − ν ) ζ ( t − ν ) dν ∀ t ∈ [0 , h q ) . W e will show that there exists a subsequence { f n ` : ` ∈ N } suc h that lim ` →∞ f n ` ( t ) = ζ ( t − b h ) for a.e. t ∈ [0 , h q ). T ogether with ( B.2 ), this yields ζ ( t − b h ) = C Λ x ( t ) for a.e. t ∈ [0 , h q ) in the case b h ∈ (0 , h q ). Sampled-data Output Regulation of Unstable W ell-p osed Systems 53 Let s > s 0 . Define ϕ ( s ) := s Z b h 0 e − s ( b h − ν ) dν = 1 − e − b hs . Since ζ ∈ L 1 ( − h q , h q ), it follo ws from F ubini’s theorem that Z h q 0 ζ ( t − b h ) − s Z b h 0 e − s ( b h − ν ) ζ ( t − ν ) dν dt ≤ Z h q 0 1 − ϕ ( s ) ζ ( t − b h ) dt + s Z h q 0 Z b h 0 e − s ( b h − ν ) ζ ( t − b h ) − ζ ( t − ν ) dν dt ≤ e − b hs k ζ k L 1 ( − h q ,h q ) + s Z b h 0 e − s ( b h − ν ) Z h q 0 ζ ( t − b h ) − ζ ( t − ν ) dtdν. Cho ose ε > 0 arbitrarily . By the strong con tin uity of the left translation semigroup on L 1 ( − h q , h q ) (see, e.g., Example I.5.4 in [ 11 ]), there exists δ 0 ∈ (0 , b h ) suc h that Z h q 0 | ζ ( t − b h ) − ζ ( t − b h + δ ) | dt < ε ∀ δ ∈ [0 , δ 0 ) . Therefore, s Z b h b h − δ 0 e − s ( b h − ν ) Z h q 0 ζ ( t − b h ) − ζ ( t − ν ) dtdν < ε (1 − e − δ 0 s ) < ε. Since s Z b h − δ 0 0 e − s ( b h − ν ) Z h q 0 ζ ( t − b h ) − ζ ( t − ν ) dtdν ≤ 2 k ζ k L 1 ( − h q ,h q ) ( e − δ 0 s − e − b hs ) , it follo ws that there exists s 1 > s 0 suc h that for every s > s 1 , e − b hs k ζ k L 1 ( − h q ,h q ) < ε, s Z b h − δ 0 0 e − s ( b h − ν ) Z h q 0 ζ ( t − b h ) − ζ ( t − ν ) dtdν < ε. Hence w e obtain Z h q 0 ζ ( t − b h ) − s Z b h 0 e − s ( b h − ν ) ζ ( t − ν ) dν dt < 3 ε. Since ε > 0 was arbitrary , we ha ve that lim n →∞ k ζ ( · − b h ) − f n k L 1 (0 ,h q ) = 0. Then there exists a subsequence { f n ` : ` ∈ N } suc h that lim ` →∞ f n ` ( t ) = ζ ( t − b h ) for a.e. t ∈ [0 , h q ); see, e.g., Theorem 3.12 in [ 41 ]. This completes the pro of. u t Ac knowledgemen ts The authors would like to thank Professor Lassi P aunonen for helpful advice on robust output regulation for infinite-dimensional discrete-time systems. F urther- more, w e would lik e to thank the anon ymous reviewers for their careful reading of our manuscript and many insightful comments. 54 Masashi W ak aiki, Hideki Sano References 1. Araki, M., Ito, Y., Hagiwara, T.: F requency response of sampled-data systems. Auto- matica 32 , 483–497 (1996) 2. Arendt, W., Batty , C.J.K., Hieb er, M., Neubrander, F.: V ector-v alued Laplace T rans- forms and Cauch y Problems. Basel: Birkh¨ auser (2001) 3. Balas, M.J.: Active control of flexible systems. J. Optim. Theory Appl. 25 , 415–436 (1978) 4. Ball, J.A., Gohberg, I., Ro dman, L.: Interpolation of Rational Matrix F unctions. Basel: Birkh¨ auser (1990) 5. Bamieh, B.A., Pearson, J.B.: A general framework for linear p erio dic systems with applications to H ∞ sampled-data control. IEEE T rans. Automat. Control 37 , 418–435 (1992) 6. Bounit, H., Hadd, S.: Regular linear systems gov erned by neutral FDEs. J. Math. Anal. Appl. 320 , 836–858 (2006) 7. Bounit, S., Hadd, S., Saij, R.: Error feedback regulation problem for regular linear systems. IMA J. Math. Control Inform. 35 , 315–339 (2018) 8. Castillo-T oledo, B., N ´ u˜ nez-P ´ erez, E.: On the regulator problem for a class of L TI systems with delays. Kybernetik a 39 , 415–432 (2003) 9. Curtain, R.F., W eiss, G.: W ell p osedness of triples of op erators (in the sense of linear systems theory). In: Control and estimation of distributed parameter systems (pp. 41–59). Basel: Birkh¨ auser (1989) 10. Curtain, R.F., Zwart, H.J.: An In troduction to Infinite-Dimensional Linear Systems Theory. New Y ork: Springer (1995) 11. Engel, K.J., Nagel, R.: One-Parameter Semigroups for Linear Ev olution Equations. New Y ork: Springer (2000) 12. F rancis, B.A., W onham, W.M.: The in ternal model principle for linear multiv ariable regulators. J. Appl. Math. Optim. 2 , 170–194 (1975) 13. F ridman, E.: Output regulation of nonlinear systems with delay . Systems Control Lett. 50 , 81–93 (2003) 14. Hadd, S., Idrissi, A.: Regular linear systems gov erned by systems with state, input and output delays. IMA J. Math. Control Inform. 22 , 423–439 (2005) 15. Hagiwara, T., Araki, M.: FR-op erator approach to the H 2 analysis and syn thesis of sampled-data systems. IEEE T rans. Automat. Control 40 , 1411–1421 (1995) 16. H¨ am¨ al¨ ainen, T., Pohjolainen, S.: A finite-dimensional robust controller for systems in the CD-algebra. IEEE T rans. Automat. Control 45 , 421–431 (2000) 17. Hara, S., Y amamoto, Y., Omata, T., Nakano, M.: Rep etitive control system: A new type servo system for p erio dic exogenous signals. IEEE T rans. Automat. Control 33 , 659–668 (1988) 18. Ke, Z., Logemann, H., Rebarb er, R.: Approximate tracking and disturbance rejection for stable infinite-dimensional systems using sampled-data low-gain control. SIAM J. Control Optim. 48 , 641–671 (2009) 19. Ke, Z., Logemann, H., Rebarb er, R.: A sampled-data servomechanism for stable well- posed systems. IEEE T rans. Automat. Control 54 , 1123–1128 (2009) 20. Ke, Z., Logemann, H., T ownley , S.: Adaptive sampled-data integral control of stable infinite-dimensional linear systems. Systems Control Lett. 58 , 233–240 (2009) 21. Kimura, H.: Directional interpolation approach to H ∞ -optimization and robust stabi- lization. IEEE T rans. Automat. Control 32 , 1085–1093 (1987) 22. Laakkonen, P .: Robust regulation theory for transfer functions with a coprime factor- ization. IEEE T rans. Automat. Control 61 , 3109–3114 (2016) 23. Laakkonen, P ., P ohjolainen, S.: F requency domain robust regulation of signals generated by an infinite-dimensional exosystem. SIAM J. Control Optim. 2015 , 139–166 (2015) 24. Logemann, H.: Stability and stabilizability of linear infinite-dimensional discrete-time systems. IMA J. Math. Control Inform. 9 , 255–263 (1992) 25. Logemann, H.: Stabilization of w ell-p osed infinite-dimensional systems b y dynamic sampled-data feedback. SIAM J. Control Optim. 51 , 1203–1231 (2013) 26. Logemann, H., Rebarber, R., T ownley , S.: Stability of infinite-dimensional sampled-data systems. T rans. Amer. Math. So c. 355 , 3301–3328 (2003) Sampled-data Output Regulation of Unstable W ell-p osed Systems 55 27. Logemann, H., Rebarber, R., T o wnley , S.: Generalized sampled-data stabilization of well-posed linear infinite-dimensional systems. SIAM J. Control Optim. 44 , 1345–1369 (2005) 28. Logemann, H., T o wnley , S.: Discrete-time low-gain con trol of uncertain infinite- dimensional systems. IEEE T rans. Automat. Control 42 , 22–37 (1997) 29. Logemann, H., T ownley , S.: Low-gain con trol of uncertain regular linear systems. SIAM J. Control Optim. 35 , 78–116 (1997) 30. Luxemburg, L.A., Brown, P .R.: The scalar Nevanlinna-Pic k interpolation problem with boundary conditions. J. Comput. Appl. Math. 235 , 2615–2625 (2011) 31. Paunonen, L.: Controller design for robust output regulation of regular linear systems. IEEE T rans. Automat. Control 61 , 2974–2986 (2016) 32. Paunonen, L.: Output regulation of infinite-dimensional time-dela y systems. In: Pro c. ACC’17 (2017) 33. Paunonen, L.: Robust con trollers for regular linear systems with infinite-dimensional exosystems. SIAM J. Control Optim. 55 , 1567–1597 (2017) 34. Paunonen, L.: Robust output regulation for contin uous-time p erio dic systems. IEEE T rans. Automat. Control 62 , 4363–4375 (2017) 35. Paunonen, L., Pohjolainen, S.: Internal mo del theory for distributed parameter systems. SIAM J. Control Optim. 48 , 4753–4775 (2010) 36. Paunonen, L., P ohjolainen, S.: The internal model principle for systems with un b ounded control and observ ation. SIAM J. Control Optim. 52 , 3967–4000 (2014) 37. Rebarb er, R., T ownley , S.: Generalized sampled data feedbac k con trol of distributed parameter systems. Systems & Control Letters 34 , 229–240 (1998) 38. Rebarb er, R., T ownley , S.: Nonrobustness of closed-loop stabilit y for infinite-dimensional systems under sample and hold. IEEE T rans. Automat. Control 47 , 1381–1385 (2002) 39. Rebarb er, R., T o wnley , S.: Robustness with resp ect to sampling for stabilization of Riesz spectral systems. IEEE T rans. Automat. Control 51 , 1519–1522 (2006) 40. Rebarb er, R., W eiss, G.: Internal mo del based trac king and disturbance rejection for stable well-posed systems. IEEE T rans. Automat. Control 39 , 1555–1569 (2003) 41. Rudin, W.: Real and Complex Analysis, In t. Ed. Singap ore: McGrawHill (1987) 42. Sak aw a, Y.: F eedback stabilization of linear diffusion systems. SIAM J. Control Optim. 21 , 667–676 (1983) 43. Seliv anov, A., F ridman, E.: Sampled-data relay control of diffusion PDEs. Automatica 82 , 59–68 (2017) 44. Staffans, O.J.: W ell-Posed Linear Systems. Cambridge, UK: Cambridge Univ. Press (2005) 45. T ucsnak, M., W eiss, G.: W ell-p osed systems–The L TI case and b ey ond. Automatica 50 , 1757–1779 (2014) 46. Uk ai, H., Iw azumi, T.: Design of servo systems for distributed parameter systems b y finite dimensional dynamic comp ensator. Int. J. Systems Sci. 21 , 1025–1046 (1990) 47. Vidyasagar, M.: Con trol System Syn thesis: A F actorization Approach. Cambridge, MA: MIT Press (1985, Republished in Morgan & Claypo ol, 2011) 48. W ak aiki, M., Y amamoto, Y., ¨ Ozbay , H.: Sensitivity reduction by strongly stabilizing controllers for MIMO distributed parameter systems. IEEE T rans. Automat. Control 57 , 2089–2094 (2012) 49. W ak aiki, M., Y amamoto, Y., ¨ Ozbay , H.: Sensitivity reduction by stable controllers for MIMO infinite dimensional systems via the tangen tial Nev anlinna-Pick interpolation. IEEE T rans. Automat. Control 59 , 1099–1105 (2014) 50. W eiss, G., Staffans, O.J., T ucsnak, M.: W ell-p osed linear systems–a survey with empha- sis on conserv ativ e systems. Appl. Math. Comp. Sci. 11 , 101–127 (2001) 51. Xu, C., F eng, D.: Robust integral stabilization of regular linear systems. Sci. China Ser. F Inf. Sci 47 , 545–554 (2004) 52. Y amamoto, Y.: A function space approach to sampled data control systems and trac king problems. IEEE T rans. Automat. Control 39 , 703–713 (1994) 53. Y amamoto, Y., Hara, S.: Relationships b etw een internal and external stabilit y for infinite-dimensional systems with applications to a servo problem. IEEE T rans. Au- tomat. Control 33 , 1044–1052 (1988) 54. Y amamoto, Y., Khargonek ar, P .P .: F requency resp onse of sampled-data systems. IEEE T rans. Automat. Control 41 , 166–176 (1996) 56 Masashi W ak aiki, Hideki Sano 55. Y o on, S.Y., Lin, Z.: Robust output regulation of linear time-delay systems: A state predictor approach. In t. J. Robust Nonlinear Control 26 , 1686–1704 (2016) 56. Zhou, K., Doyle, J.C., Glov er, K.: Robust and Optimal Control. Prentice Hall (1996)
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment