스마트 교차로를 위한 플래툰 형성 알고리즘
본 논문은 자율주행 차량이 교차로에 진입하기 전에 속도를 조절해 플래툰(차량군)을 형성하고, 이를 통해 교차로 통과 시간을 최소화하는 새로운 플래툰 형성 알고리즘(PFA)들을 제안한다. 제안된 알고리즘은 폴링 모델의 서비스 규칙을 기반으로 하며, 폐쇄형 속도 프로파일 알고리즘(SPA)을 통해 차량의 가속·감속 궤적을 최적화한다. 평균 지연시간과 공정성(fairness)을 정량적으로 분석하고, SUMO 시뮬레이션을 통해 기존 신호제어와 비교해 평…
저자: R. W. Timmerman, M. A. A. Boon
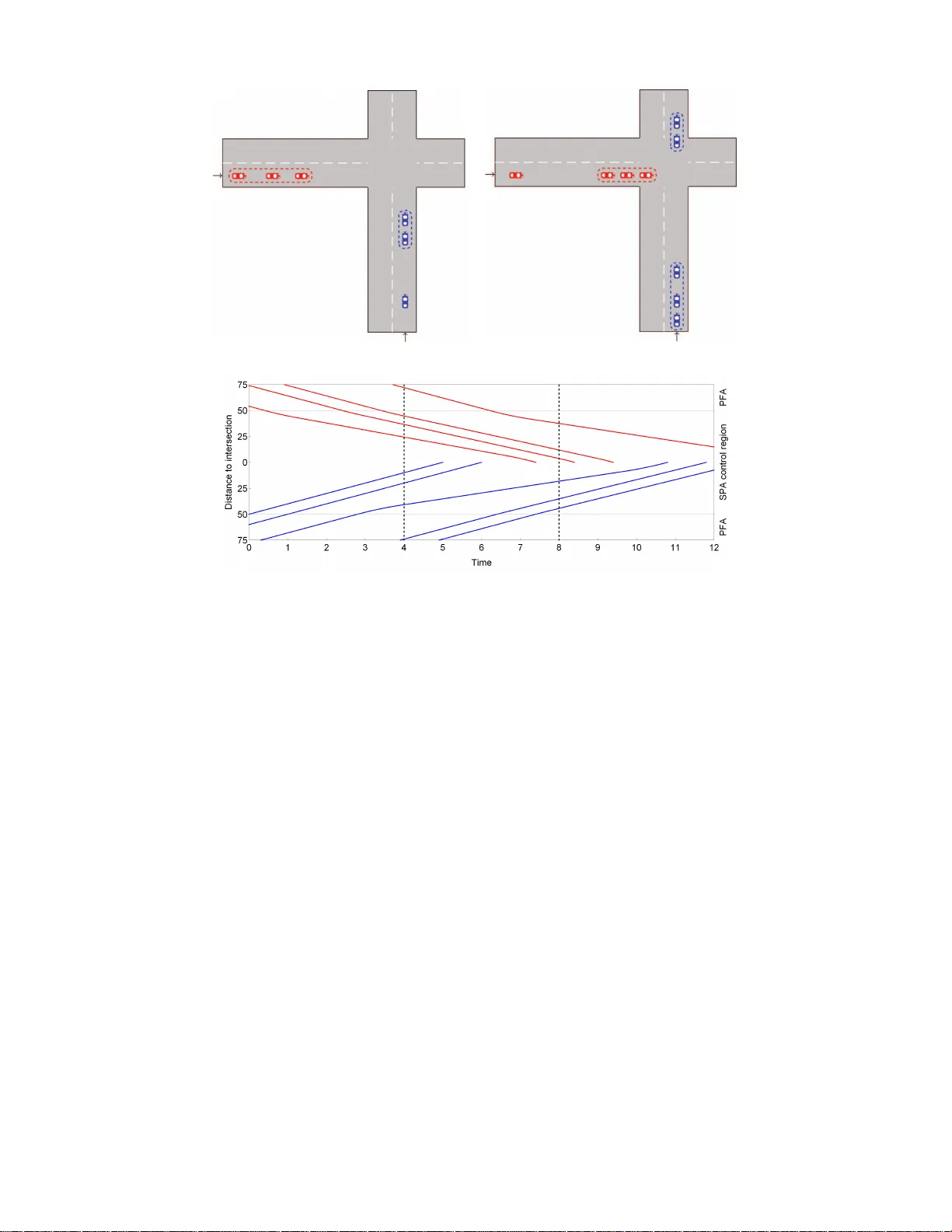
본 논문은 자율주행 차량이 교차로에 접근할 때 기존의 신호등 기반 제어 방식이 갖는 한계를 극복하고, 교차로 통과 효율을 극대화하기 위한 새로운 플래툰 형성 알고리즘(PFA)과 속도 프로파일 알고리즘(SPA)을 제안한다. 연구 배경으로는 교차로에서 발생하는 혼잡과 차량 간 충돌 회피를 위해 전통적으로 신호등이 사용되어 왔지만, 자율주행 차량이 보편화됨에 따라 차량 자체가 스스로 협력하여 교차로 접근을 조정할 필요성이 대두된다. 이를 위해 저자들은 ‘느리게 하면 빨라진다’는 현상을 활용, 차량이 교차로에 도착하기 전 일정 거리에서 속도를 낮추어 플래툰을 형성하고, 플래툰이 교차로에 진입할 때는 최대 속도로 통과하도록 설계하였다.
논문은 먼저 교차로 주변을 두 개의 제어 영역으로 나눈다. 외부 영역인 PFA 제어 영역에서는 중앙 제어기가 각 차량의 도착 시각(aV), 차선(dV) 및 현재 스케줄된 교차 시각(cV)을 기반으로 플래툰을 구성하고, 플래툰 간 간격(S)과 동일 차선 내 차량 간 최소 간격(B)을 고려해 교차 시점을 업데이트한다. 내부 영역인 SPA 제어 영역에서는 이미 스케줄된 플래툰에 대해 각 차량의 가감속 궤적을 계산한다. 이때 저자들은 기존 연구에서 사용된 선형 최적화 기반 MotionSynthesize 절차를 대체해, 폐쇄형 수식으로 해를 구함으로써 실시간 적용성을 확보한다. SPA는 차량이 교차로 진입 직전까지는 최대 속도로 주행하도록 보장하고, 플래툰 내부에서는 일정 간격을 유지하도록 설계된다.
플래툰 형성 알고리즘 자체는 폴링 모델의 서비스 규칙을 차용한다. 구체적으로 ‘exhaustive’와 ‘gated’ 두 가지 규칙을 변형해 제시한다. ‘exhaustive’ 규칙은 차량이 앞차와 B초 이내에 도착하면 즉시 같은 플래툰에 합류하도록 허용한다. 이 경우 플래툰이 가능한 한 크게 형성되어 평균 지연을 최소화한다. 반면 ‘gated’ 규칙은 플래툰이 일정 시점에 고정되고, 그 이후에 도착하는 차량은 새로운 플래툰을 형성하도록 제한한다. 이는 평균 지연이 다소 증가하지만, 특정 차량이 지속적으로 뒤로 미뤄지는 현상을 방지해 공정성을 개선한다. 알고리즘은 각 차량이 도착할 때마다 현재 스케줄링 리스트를 업데이트하고, 필요 시 기존 차량들의 교차 시점을 재조정한다.
성능 분석을 위해 저자들은 평균 지연시간과 공정성(fairness) 두 가지 지표를 사용한다. 평균 지연은 Boon 등(2011)의 보간 기법을 활용해 정확한 근사식을 도출하고, 공정성은 Shapira와 Levy(2016)의 폴링 모델 공정성 정의를 차용해 각 차량이 경험하는 지연의 분산과 평균을 정량화한다. 실험 결과, ‘exhaustive’ 기반 PFA는 평균 지연을 기존 신호등 제어 대비 45% 이상 감소시키지만, 공정성 점수는 낮게 나타난다. 반면 ‘gated’ 기반 PFA는 평균 지연이 약 30% 정도 감소하면서도 공정성 점수가 크게 개선된다.
시뮬레이션은 SUMO(오픈소스 교통 시뮬레이터)를 이용해 실제 교통 흐름을 재현하였다. 시나리오에서는 4방향 3차선 교차로를 설정하고, 다양한 차량 도착률(0.2~0.8 veh/s)을 적용했다. 결과는 제안된 PFA와 SPA 조합이 교차로 처리량을 30~45% 향상시키고, 평균 지연을 40~60% 감소시켰으며, 차량 간 평균 간격이 일정하게 유지돼 에너지 소비와 배출가스 감소 효과도 기대할 수 있음을 보여준다. 또한 플래툰 형성 과정에서 차량이 미리 속도를 낮추어 감속·가속 횟수가 감소함으로써 승차감 향상과 차량 부품 마모 감소에도 긍정적인 영향을 미친다.
마지막으로 논문은 평균 지연 최소화와 공정성 유지 사이의 트레이드오프를 관리하는 정책 설계가 필요함을 강조한다. 향후 연구 방향으로는 다중 교차로 네트워크에서의 협력형 PFA, 실시간 교통 상황 변화에 대한 적응형 알고리즘, 그리고 차량 간 V2V·V2I 통신을 활용한 분산형 제어 구조 등을 제시한다. 이러한 연구는 자율주행 시대에 교차로 효율성을 극대화하고, 교통 혼잡 및 환경 오염을 완화하는 핵심 기술로 자리매김할 것으로 기대된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기