Platoon Forming Algorithms for Intelligent Street Intersections
We study intersection access control for autonomous vehicles. Platoon forming algorithms, which aim to organize individual vehicles in platoons, are very promising. To create those platoons, we slow down vehicles before the actual arrival at the inte…
Authors: R. W. Timmerman, M. A. A. Boon
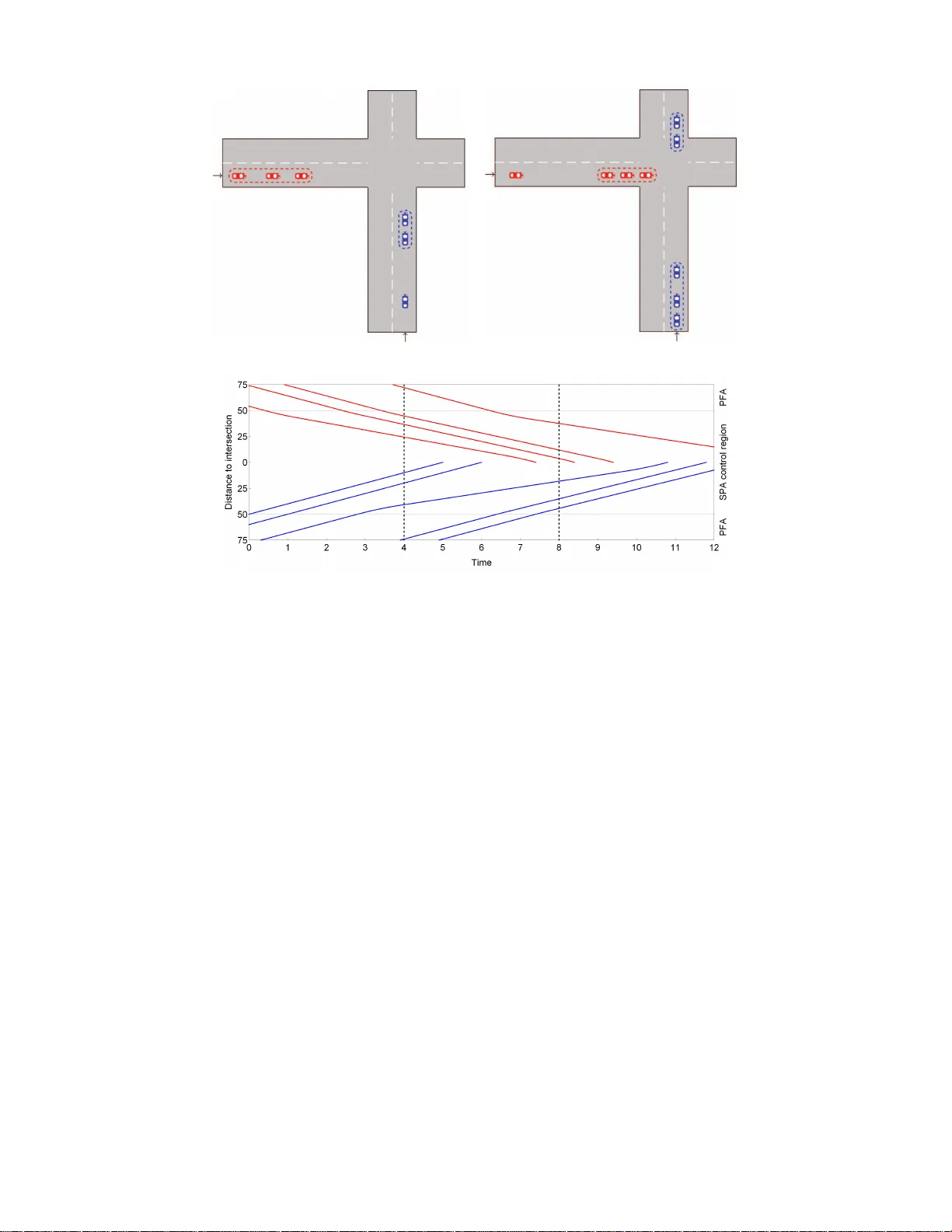
Plato on F orming Algorithms for In telligen t Street In tersections R.W. Timmerman a and M.A.A. Boon a a Eindhov en Univ ersity of T echnology , Eindhov en, The Netherla nds AR TICLE HISTOR Y Compiled 25th July 2019 Abstract W e stu dy intersection access control for autonomous vehicles. Platoon forming al- gorithms, whic h aim to organize individual v ehicles in platoons, are very promising. T o create those platoons, we slow down vehicles b efore the actual arriv al at the in- tersection in s uch a wa y that eac h vehicl e can trav erse the interse ction at high speed. This increases t h e capacity of the inters ection significantly , offering huge p otenti al sa vings with resp ect to t ravel time compared to now adays traffic. W e prop ose several new plato on forming algorithms and p ro v id e an approximate mean dela y analysis for our algorithms. A comparison b etw een the current day prac- tice at intersectio ns (through a case study in S U MO) and our prop osed algorithms is provided. Sim ulation results for fairness are obtained as w ell, showi ng that plato on forming algorithms with a lo w mean dela y sometimes are relative ly unfair, indicating a p otential need for balancing mean dela y and fairness. KEYWO RDS Platoon forming algorithms, sp eed control algorithms, autonomous vehicles, queueing th eory , p olling models. 1. In tro duction Congestion is commonp lace at inte rsections in urban traffic, but intersectio ns are in - evitable to d ivide capacit y among vehicles fr om conflicting flo w s. T o do so in a fair and efficien t manner, inte rsections are t ypically managed b y some kind of s w itc hing pro cess that alternatingly giv es access to batches of v ehicles, imp osing a constrain t on the m aximal batc h size th at can pass the intersect ion. The traditional w a y of regulating the switc hing pro cess is by installing traffic ligh ts with static signalling, using timers, see e.g. Darro c h (1964 ) and v an Leeu w aarden (2006), or dynamic signalling with sensor data of currently existing traffic flows, see e.g. P apageorgiou et al. (2003). Anticipating th e emergence of self-driving v ehicles, ef- ficien t and fair algorithms for in tersection access should b e designed. Plato on F ormin g Algorithms (PF As) pr ovide such alternativ es f or self-driving ve hicles, no longer letting the traffic ligh ts dictate the switc hing pro cess and hence batc h forming, but letti ng the v ehicles organize themselve s in b atc hes, well in adv ance of arriving at the in tersec- tion as in Miculescu and K araman (2014, 2016) and T ac het et al. (2016 ). In this w a y plato ons of v ehicles are formed that can pass the intersect ion collectiv ely . There is a natural tens ion b et ween capacit y and fairness. On e of the f airest sw itching rules is to let v ehicles pass the in tersection in order of arriv al (on an intersec tion wid e Con tact R.W. Timmerman, email: r.w.timmerman@tue.nl basis). This rapidly b ecomes unsustainable, b ecause eac h switc h r equires an add itio nal clearance time, which decreases the capacit y of th e int ersection. In near-saturation conditions, when the flo ws tog ether imp ose a high v olume-to-capac it y ratio, the loss of capaci t y du e to switc hing will ha v e a d ramatic effect on dela ys. Ou r PF As aim to balance capacit y and fairness. In PF As, vehicle s arriving at the inte rsection arrange themselves in plato ons, n ot adapting th eir relativ e p ositio n to other vehicle s on the same lane b ut ad ap tin g their sp eed. Th e k ey feature is that cars, while appr oac hing the in tersection, adjust their sp eeds and up on arriv al at the in tersection are at high sp eed, accessing the conflict area of the in tersection f or a minimum p erio d of time. In this w ay , time bans to giv e w ay to other traffic flows still exist, but the plato ons are pro cessed in the quic k est p ossible w a y , b ecause the size and sp eed of the p lat o ons, of all dir ect ions, are organized by the PF A. PF As are one p articular example of the ‘slo wer is faster’ effect, whic h is also ob- serv ed in e.g. Helbing, F ark as, and Vicsek (2000) and Helbing and Mazloumian (2009), where, p erhaps coun ter-in tuitiv ely , slo wing down early resu lts in less dela y on a verag e in the future. Moreo ver, th is phenomenon results in envi ronmental adv an tages as less braking-and-pulling-up -again is n eeded and cars reac h th eir destination m ore quickly . The imp ortance of in tersection access algorithms has b een recognized for several y ears. Examples of PF As can b e found in T ac het et al. (2016), whic h introd uces a batc h formation algorithm based on arriv al times of v ehicles and a maximum batc h size, and in Miculescu and Karaman (2014, 2016), wh ich use an appr oac h based on queueing mo dels, and to b e more sp ecific p ol ling mo dels . Queueing th eory has pla y ed an imp ortant role in the mo deling and p erformance analysis of signalized and u n signal- ized intersect ions s in ce the early sixties, see for example the seminal p ap ers b y Newel l (1965) and T anner (1962). Poll ing mo dels are queueing systems where one s erv er visits m ultiple q u eues, generally in a cyclic order. The multidimensional analysis of p olling mo dels is able to captur e the in trinsic in teractions b et ween the pr ocesses taking p lace at the differen t queues. Poll ing mo dels hav e a long tradition in comm unication net- w orks, but Miculescu and Karaman (2014) hav e sho wn th at their applicabilit y can b e extended to intersectio ns of autonomous v ehicles. O ne of the k ey questions in p olling mo dels is ho w to d ecide w h ic h queue should b e serve d (and ho w man y cus- tomers b efore ad v ancing to the n ext qu eue). This is exactly one of the main topics of this p ap er, wh ere we d ev elop algorithms that determine how to construct plato ons of autonomous v ehicles and wh en to giv e eac h plato on access to the in tersection. A sp eed profile algorithm provides the k ey link b et wee n th e P F As and p olling mo dels, whic h we will sho w in more detail later. In the existing literature, many more mo d- els and control tec hniqu es are inv estigated lik e reserv ation based control algorithms (Dresner and S tone 2008) and con trols based on fuzzy logic (Mila n´ es et al. 2010). In a recent pap er, Liu, W ang, and Ho ogendo orn (2019) pr esen t a metho d for fixed-cycle plans, wher e the PF A and the optimization of the tr a jectories are integrat ed. F or an o verview we refer to Rios-T o rres and Malik op oulos (2017). The area of application of PF As is n ot restricted to in tersections. Th ere are nu- merous cases w here PF As could b e used to ac h iev e a go od p erformance. An ex- ample in traffic would b e the merging of different streams of vehicl es (d iscussed in e.g. Rios-T orres and Malik op oulos 2017). Another p ossible application can b e found in automated guided vehicl es (AG Vs) systems, wh er e A GVs cross eac h other or ha v e to merge, see e.g. Ko c k elk oren (2018). In Ko c kelk oren (2018), ideas stemming fr om sp eed profile algo rithms are used and so PF As can b e used in similar t yp es of A GV systems. 2 Main Contributions Our first contribution is the in tro duction of several new PF As, based on enhanced p olling p olicies, th at p erf orm wel l regarding mean dela y , u nifying and extending ideas from Miculescu and Karaman (2016 ) and T ac het et al. (2016 ). Our second con tribution is the in tro duction of a new class of closed-form sp eed profile algorithms (SP As). S P As ensure an efficien t use of the inte rsection, b y optimiz- ing the tra jectory of (plato ons of ) v ehicles d r iving to w ards the in tersection, ensuring the arriv al at their designated times. Miculescu and Karaman (2014) introdu ced the MotionSyn thesize pr ocedur e, a linear optimization program to fin d these tra jectories. The MotionSyn thesize algorithm computes the optimal tra jectory for an autonomous v ehicle, giv en the tra jectory of its predecessor an d the crossing time computed by the PF A. W e ha v e d evelo p ed an alternativ e to this p r ocedur e exhibiting desirable prop er- ties and we h a v e foun d closed-form solutions for the MotionSyn thesize p rocedu re and for this alternativ e, alleviating the n eed for lin ear optimization solv ers. Using such sp eed profile algorithms, a link b et ween p olling mo dels and PF As is established, making it p ossible to conduct a p erf ormance analysis on e.g. mean dela y , whic h is the main p erformance c haracteristic consid ered in the literature for algorithms lik e PF As. Using inte rp olation tec hn iqu es from Bo on et al. (2011) we dev elop accurate appro ximations for the mean dela ys. Another con tribution is the introdu ctio n of the n otio n of fairness of a PF A. F airn ess in queueing mo dels (and ther efore PF As) is imp ortant in the p erception of customers, see e.g. Rafaeli, Barron, and Hab er (2002). W e use the quantifica tion of fairn ess as defined in Shapira and Levy (2016) for p olling mo dels, to assess the fairness of the v arious PF As. F ur th ermore, we pr o vide a comparison b et w een the p erformance of traditional traffic tec hn olo gies and PF As through simulat ions in SUMO and sh o w that in tersections in the f u ture can b e u sed muc h m ore efficien tly , r educing congestion. Or ganization of the p ap er This pap er is organized in the f ollo wing wa y . W e start with a d escription of the v arious ingredien ts of the mo del and pro vid e an extensive d escription of the n ew PF As that w e introdu ce in Section 2. Section 3 is dev oted to SP As. Afterwards, we introdu ce p olling mo dels and give the analytica l results that w e need for the analysis of mean dela y and fairness of PF As in S ect ion 4 . Su bsequen tly , Section 5 pro vides a comparison b et ween the traditional traffic ligh t (repr esen ted by sim u lat ions in SUMO) and our PF As, fo cusing on m ean dela y , and w e wr ap up with conclusions and discussions in Section 6. 2. Mo del F orm ulation W e w ill consider mod els in wh ic h autonomous vehicles are crossing an inte rsection. W e assume the existence of a control r egi on aroun d the in tersection with at the cen ter a cent ralized con troller comm unicating w ith all v ehicles within the con trol region. In fact, this con tr ol r egion can b e divided in to t w o sub-regions: the inner part is call ed the “SP A con trol region”. As so on as a v ehicle ente rs this part of the con trol region, its tra jectory is determined by th e sp eed profilin g algorithm. In the outer part, wh ic h w e call the “PF A control region”, the access times of eac h of th e arriving vehicl es to the 3 in tersection are determined. In this PF A con trol region, the central con troller creates plato ons of vehicl es by scheduling th e crossing times of th e vehicl es according to some p olicy (the PF A) in suc h a w a y that ev ery v ehicle is able to cross the in tersection at its designated time. W e assume that we can cont rol the sp eed of a ve hicle and do so in suc h a w a y that the inte rsection is used efficien tly . W e make sur e that ve hicles dr ive at maxim um sp eed at the moment they are starting to cross the in tersection, using ideas in tro duced in Miculescu and Karaman (2014). In stead of stopping at the stop line and still ha ving to accel erate when crossing the intersectio n, a vehicle is already slo w ed do wn b efore it reac h es the in tersection and s tarts accele rating again, s u c h that it is driving at fu ll sp eed wh en reac h ing the conflict area of the in tersection. This amongst others implies th at the time to cross the in tersection is the same for eac h ve hicle. Th e last assumption discuss ed here, is that w e assume that the central con troller can lo ok ‘ahead’ f or the same amount of time for eac h of the lanes, to ease the n ota tion and algorithms. The reason why we n eed separate control regions for the PF A and the SP A is that we need the tra jectory to b e fixed once a ve hicle enters th e SP A con trol region. Inside the PF A con trol region, v ehicle access times ma y b e adjusted due to the arr iv al of other vehicl es. W e clarify h o w th is works in a simple example, depicted in Figure 1. F or simplicit y , w e sh o w vehicles arriving from only t wo different appr oac hes (marked red and blu e). The cen tral con troller uses a PF A to compute the access times to (the conflict area of ) the intersecti on for eac h v ehicle en tering the con trol region. The intersect ion drawn in Figures 1(a) and (b) only depicts the inner (SP A) part of the con trol region. Figure 1(c) sho ws the corresp onding tra jectories. Note that all v ehicles drive at f ull sp eed in the PF A con trol area (from 75 – 50 metres distance) and start th eir tra j ectories con trolled b y the SP A at 50 m etres distance. T he blue v eh icle en tering the SP A control region at time t = 0 encoun ters no hinder from other v ehicles an d pro ceeds at fu ll sp eed, without dela y . Th e fir s t red ve hicle w as originally s c heduled to arriv e at the in tersection directly after the fi r st blue v ehicle. Wh en, ho we ve r, the second blue v ehicle ente red the PF A con tr ol region at t = 1 (p robably arriving in a plato on fr om an upstream intersec tion), this b lue v ehicle is allo wed to join th e platoon started b y the previous b lue v ehicle. This means that the first red v ehicle is rescheduled, b eing d ela y ed for tw o seconds. This means that it gets acce ss to the int ersection after the second blue v ehicle, at a safe distance. Due to this t wo second dela y , the next t w o red v ehicles are able (and allo wed) to join the r ed p latoon. The actual tra jectories to w ards the intersecti on are determined by an SP A, wh ic h ensures an efficien t u sage of the intersect ion. Note that all v ehicles cross the in tersection at f ull sp eed. An adv an tage of the control region, b esides the abilit y to control the sp eed of arriving v ehicles, is that we can adjust the scheduling of the vehicl es based on th e arriving ve hicles that are not y et at th e intersect ion. This sp ecific anticipati on is ke y to th e forming of platoons and is u p to the cen tral con troller at the in tersection and results in a sp ecific PF A. There are man y PF As, yet we will sp ecifically fo cus on P F As that fin d their origin in p olling mo dels, b ecause they are efficient, we ll un derstoo d and ha v e pr o v en their v alue in other application areas, such as communicatio n systems and p rod uction lines. 2.1. Plato on F orming Algorithms W e present our new PF As as s tand alo ne algorithms, based on service disciplines for p olling mo dels, wh ic h are describ ed in a w a y fit for PF As. W e also briefly discuss the 4 (a) In tersection at tim e t = 4. (b) In tersection at time t = 8. (c) T ra jectories for the red and blue traffic flows. Figure 1. A sc hematic representat ion of the model discussed in this paper. The plato on forming algorithms in this paper determine how the platoons ar e const ructed. In the next step, a sp eed profiling algorithm determines ho w eac h individual v ehicle approache s the in tersection. Fig (a) and (b) corresp ond, respective ly , to the s i tuat ion in (c) at times t = 4 and t = 8 seconds. Batc h Algorithm, originating from T ac het et al. (2016 ), whic h serves as a b enchmark for our PF As. Th e PF As w e discuss, are all d eriv ed f rom so-called branc hing-t yp e disciplines, whic h find their origin in the p olling literature, see e.g. Resing (1993). Branc hing-t yp e service disciplines include the exhaustive and the gated discipline, whic h all allo w f or many analytical resu lts. Before w e start with the d escriptions of the PF As w e in tro duce some concepts and n ota tion. Th e P F A determines th e crossin g time of eac h of th e v eh icle s in the con tr ol region that ha ve n ot yet cr ossed the intersectio n. W e rep r esen t this sc hedule b y an ent it y we call ‘v ehicles’. A v ehicle V has three pr operties: a lane d V , an earliest crossing time a V and the curr ently sc heduled crossing time c V . W e assume that at ev er y p oint in time we h av e such a list of ve hicles, ordered on basis of the c V ’s. Th e PF A up dates (part of ) the crossing time of th e v ehicles up on arriv al and departure ep o c hs of v ehicles in th e con trol region. T he latte r is dealt with in an easy wa y: if the cur ren t time is c V + B , w here B denotes the d ifference in crossin g times b et w een t wo vehicle s on the same lane, th en ve hicle V is remo v ed f r om the ordering. T u rning to wards arriv als of vehicles within the control region, we need to consider the crossing times of all v ehicles already sc hedu led in order to sc hedule V . There are seve ral wa ys to sc hedule those ve hicles and the first we discuss is the e xhaustive discipline , as describ ed in Algorithm 1. An intuitiv e explanation of the exhaustive discipline is the follo win g: if a vehicl e that arriv es in th e con trol region is able to get within B seconds of the 5 v ehicle in front of it on the same lane (which might o ccur if th e vehicl e is dela y ed b y its pr edecesso r), it is allo w ed to join the same p latoon as its predecessor. This w ould imply that all v ehicles on different lanes ha v e to w ait an additional B seconds. If a v ehicle cannot join the plato on in fron t of it, it will form a new plato on. If no vehicl e (on the current lane) is able to j oin the platoon cur ren tly crossing the inte rsection, the next p lato on of vehicles at the next lane may cross the int ersection. As a result w e ha v e a cyclic stru cture of departur es of plato ons. This discipline is known for its lo w mean d ela y , whic h is the main reason to consid er this discipline. W e also in tro du ce one more constan t, S , that r ep resen ts the time b et ween the start of crossing of t wo ve hicles on differen t lanes (similar to clearance times at in tersections no wada ys). Algorithm 1 exhau s tiv e algorithm. 1: Input: current ordering of v ehicles, d en ote d ( V 1 , V 2 , ..., V K ), ordered on basis of c V ; V last , defined as V K or the last v eh icle that crossed the inte rsection if the ordering is empty; an d a to b e sc hed uled v eh icle V 0 with earliest arriv al time at the inte rsection a V 0 in lane d V 0 . 2: if c V last + B < a V 0 then ⊲ V 0 is s c heduled last 3: if d V 0 = d V last then 4: Put c V 0 ← a V 0 . ⊲ V 0 pro ceeds without delay 5: else 6: Put c V 0 ← max { a V 0 , c V last + S } . ⊲ Check if a dditional clearance time is needed 7: end i f 8: else 9: Put t i ← c L i where L i is la st s c heduled vehicle in la ne i, −∞ if lane i is empty and no such vehicle exists. 10: if t d V 0 + B > a V 0 then ⊲ V 0 is a ble to join a plato on 11: Put c V 0 ← t d V 0 + B . 12: for ea c h vehicle V in the order ing with c V > t d V 0 do 13: Put c V ← c V + B . ⊲ Delay other vehicles 14: end for 15: else 16: for l in ( d V 0 − 1 , d V 0 − 2 , ..., 1 , n, n − 1 , ..., d V 0 + 1) do 17: if t l + S > a V 0 then ⊲ V 0 starts new plato on after last plato on in lane l 18: Put c V 0 ← t l + S . 19: for ea c h vehicle V in the order ing with c V > t l do 20: Put c V ← c V + S . ⊲ Delay other vehicles 21: end fo r 22: break 23: end i f 24: end for 25: end if 26: end if 27: Add vehicle V 0 to the ordering. 28: Output: the new ordering ( V 1 , V 2 , ..., V 0 , ..., V K ) Although the exhaustive PF A will h a v e very goo d d ela y c haracteristics, w e will consider the gate d PF A (discu s sed b elo w) as well. Th e int uitive exp lanat ion of the gated algorithm is quite close to that of the exhaustive discipline, with one exception. It is not alw a y s allo we d to join a platoon, ev en if a vehicl e is able to get w ithin B seconds from its predecessor on the s ame lane. As describ ed in more detail b elo w, plato ons are finalized at an earlier moment than with exhaustiv e service. Th is moment of finalizing a plato on is, in the p olling literature, compared to p utting a gate b ehind the last customer (corresp onding to the last ve hicle in the plato on). Newly arriving 6 customers w ill ha v e to w ait (b ehind the virtual gate) for the next server visit, which corresp onds to th e formation of a new plato on in our setting. An adv antage of th e gated d iscipline is that there is less v ariation in the size of plato ons and, hence, cycle lengths are less v ariable as well. It may result in longer dela ys though, as w e will see in the numerical examples in Section 4. F or the imp lemen tation of the gated PF A, we need to ke ep trac k of a couple of additional v ariables f or eac h lane. In this gated discipline w e are namely ‘putting gates’ whic h can b e seen as ‘fixing the v ehicles of a platoon’, meaning that futur e arriv als in the same lane cannot j oin the cur ren tly formed plato on (i.e. they are ‘b ehind the gate’). W e d efine t w o additional, ordered sets f or eac h lane f i and t i represent ing the set of start times of plato ons on lane i , resp ectiv ely the end of platoons at lane i (so the start of service of the last v ehicle). Joining a plato on is only allo w ed if the lane is not th e lane fr om which v ehicles are currently departing (the plato on is not y et fixed). I f a car in lane i is able to reac h the int ersection (without any other in terfering traffic) b efore one of times in f i , th en that car is allo we d to join that plato on (so the plato on is enlarged). If suc h a car is not able to reac h the in tersection b efore one of the times in f i , then it creates a new platoon. In general, d ep artures of v ehicles are dealt with in the same wa y as in the exhaustive discipline. W e again ha v e the cyclic structure as in the exhaustive disciplin e. The gated algorithm can then b e describ ed as in Algorithm 2. As a referen ce to algorithms so far established in the literature, w e also con- sider the Batc h Algorithm fr om T a c het et al. (2016 ). F or the full description we refer to (T ac het et al. 2016, Supplementary Information, S ectio n 1.5). T he Batc h Algorithm has some ingredient s of a gated PF A (also in the Batc h Algorithm ‘gate s’ are put), together w ith a maximum n umb er of ve hicles dealt with in one cycle. 3. Sp eed Profile Algorithms No w th at w e kno w how to sc hedu le the crossing times of vehicles at the int ersection, we turn to the other k ey ingredien t of our mo del, w hic h is the sp eed profiling of arriving v ehicles. W e start with some r equ iremen ts that the PF As ha v e to satisfy b efore we can con tr ol the sp eed of the arriving v ehicles in a prop er and safe wa y . Th e m ain condition a PF A has to satisfy is r e gularity . Definition 3.1 (Miculescu and Karaman 2014, 2016) . A p olling p olicy is r e gu lar if an arriv al in a qu eue do es n ot c h ange the or der of ser v ice of all currently pr esen t v ehicles. I.e. the n ew arriv al is ins er ted somewhere in th e order of service of all w aiting v ehicles. A regular p olling p olicy , together with assumin g a sufficientl y big control region, ensures th at the intersectio n co ordination algorithm in Miculescu and Karaman (2014, 2016) and the sp eed pr ofile algorithms that we will introduce are s olv able. Th ese assumptions are necessary with resp ect to the (p ossibilit y of ) rescheduling of vehicl es. As can b e seen in Algorithms 1 and 2, the access time of (some of the) vehicles to the in tersection might b e increased, up on whic h tra jectories hav e to b e resc heduled. The ab o v e assumptions ensu re that we can fin d feasible and safe tra jectories f or every v ehicle, also in case of rescheduling, cf. Miculescu and Karaman (2014, 2016). Besides these t wo assump tio ns on regularit y and the size of th e con tr ol region, we also need to mak e sure that there are not to o many vehicl es in th e con trol region at the 7 Algorithm 2 gated algorithm. 1: Input: current ord er in g of v ehicles, denoted ( V 1 , V 2 , ..., V K ), ordered on basis of c V ; V last , defined as V K or the last vehicle that crossed th e int ersection if th e ordering is emp ty; the sets f i and t i for i = 1 , ..., n r epresen ting the start of platoons and end of platoons at lane i ; and a to b e scheduled vehicle V 0 with earliest arriv al time at the in tersection a V 0 in lane d V 0 . 2: if c V last + B < a V 0 then ⊲ V 0 is s c heduled last 3: if d V 0 = d V last then 4: Put c V 0 ← a V 0 . ⊲ V 0 pro ceeds without delay 5: else 6: Put c V 0 ← max { a V 0 , c V last + S } . ⊲ Check if a dditional clearance time is needed 7: end i f 8: Add time c V 0 to f d V 0 and time c V 0 to t d V 0 . ⊲ Register c V 0 as star t o f a new plato on 9: else 10: if there is a time in f d V 0 > a V 0 then ⊲ V 0 is a ble to join a plato on 11: Put f ← the low est time in f d V 0 such that f < a V 0 . 12: Put t ← the corr e s ponding end of plato on in t d V 0 . 13: Put c V 0 ← t + B . 14: for ea c h v alue t ∗ in t 1 , ..., t n with t ∗ > t do ⊲ Up date sets t and f 15: Put t ∗ ← t ∗ + B 16: Put the corr esponding s ta rt o f plato on f ∗ ← f ∗ + B . 17: end for 18: for ea c h vehicle V in the order ing with c V > c V 0 do 19: Put c V ← c V + B . ⊲ Delay other vehicles 20: end for 21: else 22: for l in ( d V 0 − 1 , d V 0 − 2 , ..., 1 , n, n − 1 , ..., d V 0 + 1) do 23: if there is a time in t l + S > a V 0 then 24: Find the low est time t in t l such that t + S > a V 0 . ⊲ V for ms a new plato on 25: Put c V 0 ← t + S . 26: if ther e is a time in f l such that t = f l then 27: for each v alue t ∗ in t 1 , ..., t n with t ∗ > t + S do ⊲ Up date sets t and f 28: Put t ∗ ← t ∗ + 2 S 29: Put the corr esponding start of plato on f ∗ ← f ∗ + 2 S . 30: end for 31: for each vehicle V in the ordering with c V > t + S do 32: Put c V ← c V + 2 S . ⊲ Delay other vehicles 33: end for 34: else ⊲ V 0 is a ble to join a plato on 35: for each v alue t ∗ in t 1 , ..., t n with t ∗ > t + S do ⊲ Up date sets t and f 36: Put t ∗ ← t ∗ + S 37: Put the corr esponding start of plato on f ∗ ← f ∗ + S . 38: end for 39: for each vehicle V in the ordering with c V > t + S do 40: Put c V ← c V + S . ⊲ Delay other vehicles 41: end for 42: end i f 43: Add time c V 0 to f d V 0 and c V 0 to t d V 0 . 44: break 45: end i f 46: end for 47: end if 48: end if 49: if C V 0 is undefined then 50: Put c V 0 ← c V K + B . 51: Add time c V 0 to f d V 0 and time c V 0 to t d V 0 . 52: end if 53: Add vehicle V 0 to the ordering. 54: Output: the new ordering ( V 1 , V 2 , ..., V 0 , ..., V K ) 8 same time: if there are to o man y v ehicles p resen t in the control r egi on, it m ight b e the case that a newly arrivin g v eh icle cannot decelerate to a complete stop in the distance b et ween en tering the control region and the stopping p osition of its pr edecessor. This phenomenon is called over cr owding , see Miculescu and Karaman (2016). A w a y to deal w ith this issue is prop osed as we ll: w e assume that a vehicle that cannot en ter the control region safely , do es not en ter the con tr ol region at all. All PF As that we d iscussed are regular in the sense of Definition 3.1. F or the Batc h Algorithm of T ac het et al. (2016) w e p ostulate that this condition is also satisfied. 3.1. Optimization b ase d Sp e e d Pr ofile A lgorithms In this su bsection, w e discuss tw o algorithms that, satisfying ab o ve conditions, result in an efficient u se of th e inte rsection wh ic h is our main pu rp ose. T o this end, w e require that v ehicles drive at maximum s p eed wh ile crossing the inte rsection, so we need to con tr ol the sp eed of arriving vehicle s while they are in th e con tr ol r egi on. A relativ ely simple optimization algorithm can th en b e formulated that do es the tric k, as is sho w n in (Miculescu and Karaman 2014, 2016, the MotionSyn thesize pro cedure). In order to solv e this minimization p roblem, time is discretized. T he MotionSynthesize p rocedu re is th en reduced to a linear optimization problem, for wh ic h efficien t solv ers exist. The optimizatio n p rocedu r e has sev eral nice pr operties, among whic h is that the algorithm is pro v ably safe. A formal definition of “safe” and the required conditions (suc h as “no o v ercro wdin g”) are given in Miculescu and Karaman (2016), but in tu- itiv ely it simply means th at no collisions will o ccur in the con trol region. Another prop ert y is that th e distance b et ween vehicl e and intersect ion is min imized across the whole time p eriod a v ehicle is in the con trol region. Th is is equiv alen t with the min- imization of the area u nder the distance-time diagram, w h ere the d istance is defi ned as the distance b et we en vehicle and int ersection. The p h ysical length of the queue of v ehicles is th us also min imized. Th is is fa v orable in a n et w ork setting, minimizing the amoun t of spillbac k to other in tersections. Y e t, this sp ecific p rop ert y of minimizing the distance b et ween v ehicle and in tersection has a high en ergy consum p tion and ma y n ot b e v ery pleasan t for passengers. Belo w, in Algorithm 3, we discuss a slightl y different form ulation of th e problem and we minimize the total amoun t of the absolute v alue of the ac c eler ation instead of the distanc e b et ween v ehicle and inte rsection. Instead of minimizing the area un der the distance-time graph, w e now minimize the area un der the “absolute v alue of the acceleratio n-time” graph. Note that the sc heduled crossin g time is set by the PF A. In this section, for consistency with Miculescu and K araman (2016), we us e the notation t f to denote sc heduled crossing time, instead of c V . As- suming regularit y of th e PF A and a sufficien tly b ig con tr ol r egi on is not sufficien t to ensure a feasible optimization problem as it is for the MotionSynthesiz e pro cedure. W e formulate a mild additional constraint to guarante e feasibilit y of the optimization problem, whic h is that one needs to b e sure that when the p receding v ehicle is d on e decelerating, the next v ehicle is able to decele rate to that same sp eed as w ell b efore the preceding v ehicle is decelerating further (due to resc heduling for example). As will turn out, a v ehicle s tarts d ece lerating immediately after ent ering the con trol r egio n (see e.g. Figure 3). As a consequence, if a v ehicle is en tering the con trol region, it needs to b e sure that it is ab le to decelerate to the sp eed of its p redecessor while main taining a certai n d istance to its predecessor at the same time, sh o wing that we need the additional assumption. Before we turn to the algorithm, we in tro duce some n otation. Eac h ve hicle has a 9 tra jectory that is computed along th e lines of the algorithm, given the current time, t 0 , and the sc heduled crossing time t f . The algorithm will compute x ( t ), the place of the v ehicle at time t , for t 0 ≤ t ≤ t f , the sp eed v ( t ) at time t and th e acceleratio n a ( t ) at time t . F ur thermore, y ( t ) den otes the tra jectory of the predecessor (if an y) for t 0 ,y ≤ t ≤ t f ,y ; t f ,y denotes the fin al crossing time of the p redecessor of the v ehicle w e are currently planning; l denotes the minimal distance b et wee n the fron t p art of t wo successiv e v ehicles; a m denotes the maximum acceleration; − a m denotes the maxim um decelerat ion; and v m denotes the maximum sp eed. The initial conditions, i.e. the lo catio n and sp eed at the start of the tra jectory of the v ehicle, are giv en b y x ( t 0 ) = x 0 and v ( t 0 ) = v 0 . T o put the lo cat ion x ( t ) into p ersp ectiv e, we measure x ( t ) as the (negativ e) distance b et ween the vehicle and the start of the conflict area of the in tersection, i.e. x ( t 0 ) = x 0 = − X and x ( t f ) = 0, when the ve hicle enters the con trol region at a d istance X from the in tersection. Algorithm 3 can b e d iscretiz ed in order to obtain a linear optimization problem, just as the MotionSynthesize pr ocedur e. Algorithm 3 MotionSynthesize p ro cedu re w ith a minimal acceleration 1: Input: x 0 , v 0 , t 0 , t f , t f ,y , y . 2: Compute MotionSyn thesizeAcc( x 0 , v 0 , t 0 , t f , t f ,y , y ) := arg m in x :[ t 0 ,t f ] → R Z t f t 0 | a ( t ) | dt sub ject to x ′′ ( t ) = a ( t ), f or all t ∈ [ t 0 , t f ]; 0 ≤ x ′ ( t ) ≤ v m , f or all t ∈ [ t 0 , t f ]; | a ( t ) | ≤ a m , for all t ∈ [ t 0 , t f ]; | x ( t ) − y ( t ) | ≥ l , for all t ∈ [ t 0 , t f ,y ]; x ( t 0 ) = x 0 ; x ′ ( t 0 ) = v 0 ; x ( t f ) = 0; x ′ ( t f ) = v m . 3: Output: x ( t ). Algorithm 3 is solv able under the set of conditions form ulated ab ov e, i.e. regularit y of the PF A, a sufficien tly big con trol region and the assumption on decele rating of a predecessor of a v ehicle. The main d ifference is that instead of minimizing the distance from ve hicle to in tersection, we minimize the (absolute v alue of the) acc eleration ap- plied b y the vehicl e wh ile b eing in the con trol region. T h is ob viously has consequences for the amount of energy consu mption (it will b e lo wer th an in the MotionSyn thesize pro cedure). Disadv anta ges includ e th at the physica l length of the queue gro ws and that ve hicles cann ot enter the con trol region as close to eac h other (as v ehicles slo w do wn immediately w hen en terin g the con trol r egio n). In the next subsection we present closed-form solutions to the Motion- Synt hesize pro cedure and Algorithm 3, similar in s p irit as the results in e.g. La witzky , W ollherr, an d Buss (2013) and Dib et al. (2014). S o instead of the need to solv e a linear optimization problem eac h time, we ha v e a simple set of calculati ons that we can p erform to find the tra jectory of a vehicl e, which is optimal with resp ect to minimizing the d istance or accelerat ion. These closed-form expressions immediately sho w why Algorithm 3 is solv able. In Remark 2 we return to this topic. 10 3.2. Close d-form Sp e e d Pr ofile A lgorithms W e start with t wo imp ortan t observ ations that form the basis for our closed-form SP A s: (1) the optimizati on problem form ulated in the Motio nSy nthesize pro cedure alw a ys leads to piece-wise constant acceleration; (2) if all vehicle s d ece lerate (and p ossibly stop) at most onc e , at most four c hanges in the accele ration o ccur. These observ ations imply th at if w e can find the p oints at whic h the acceleration c h anges, we are able to d etermine the tra jectory analytic ally and in closed-form. W e giv e s ome intuition b ehind the main id eas of Algorithm 4. W e ha ve to plan the tr a ject- ory f rom t 0 , the curr en t time, u n til t f , the crossing time set b y the PF A. It is sufficient to giv e th e accelerati on for an y time t ∈ [ t 0 , t f ]. In deed, it is true that the exhaustiv e and gat ed algorithms ha v e the desirable p rop ert y th at v ehicles need to decelerate at most once. F rom th e p olling literature we know that exhaustiv e service ensures that customers w ill alw a ys b e serv ed b efore the end of the cycle in which they arriv e. With gated service, customers will alw a ys b e s er ved in the next cycle. T ranslated to our traffic mo del, this means that no vehicle will ev er need to stop more than once. As a consequence, the acc eleration is piece-wise constan t and c h anges at most four times. W e shortly describ e those five parts of the arr ivin g tr a jectory . • No acceleration or d eceleration from t 0 unt il t de c ; • Decelerat ion at maxim um rate fr om t de c unt il t stop ; • A stop from t stop unt il t ac c ; • Accelerati on at maxim um rate fr om t ac c unt il t ful l ; • No acceleration or d eceleration from t ful l unt il t f . All that remains is that w e hav e to find t de c , t stop , t ac c and t ful l in suc h a wa y that w e minim ize the av erage distance b et we en v ehicle and int ersection. This is done in the closed-form solution of the MotionSynt hesize pro cedure (Algorithm 4), wh ere we assume that t 0 = 0 to ease the notation an d that v 0 = v m . W e can allo w for general v 0 , but w e sh ow later that this wo uld alwa ys result in a sub -optimal tra j ect ory . T he inpu t consists of the (negativ e) distance b et wee n vehicle and inte rsection at t = 0, again denoted by x 0 , the scheduled crossing time of the vehicl e, t f , and the tra jectory of the predecessor of th e v ehicle for which w e are currently planning the tra jectory , y , and its crossing time t f ,y . W e pro ve that the MotionSyn thesize pro cedure and Algorithm 4 are equiv alen t, w hic h is the sub ject of the next lemma. Lemma 3.2. The M otionS ynthesize pr o c e dur e and Algorithm 4 ar e e quivalent in the sense that b oth minimize the distanc e b etwe en vehicle and interse ction acr oss the time p erio d t 0 to t f . Pr o of. W e split the pro of in tw o parts. First w e pro ve that the times t de c , t stop , t ac c and t ful l in Algorithm 4 indeed result in the tra jectory ha ving the minimal area und er the distance-time graph, assuming that the optimal tra jectory contai ns at most one p erio d of d ecel eration. Then we pro v e that the obtained form of the tra jectory , with at most one p erio d of deceleration, is ind eed optimal. Segmen t 1. As indicated b efore, for no w, w e only consider tra jectories that con tain at most one p erio d of deceleratio n. W e allo w that v 0 < v m (but we will sho w now that that is s ub optimal), b ut we do require that v ( t ful l ) = v ( t f ) = v m . W e distinguish 11 Algorithm 4 closed-form solution to the MotionSynthesiz e pr ocedur e. 1: Input: x 0 , t f , t f ,y , and y . 2: if t f − t f ,y = B the n 3: Consider tra jectory y an d determine the time at whic h the v eh icle con tinues at fu ll sp eed. Call this time t ful l . 4: else 5: Put t ful l ← t f . 6: end if 7: Put L ← v m t f − v m a m . (1) ⊲ L r ep resen ts the d istance co vered if a v ehicle stops f or 0 seconds 8: if L ≥ | x 0 | then ⊲ The vehicle has to stop 9: Put t ac c ← t ful l − v m /a m . 10: Put t stop ← t ac c − ( t f − v m /a m − | x 0 | /v m ). 11: Put t de c ← t stop − v m /a m . 12: else ⊲ Th e v eh icle d o es n ot ha v e to stop 13: Define ˜ t ← s t f v m − | x 0 | a m . (2) ⊲ ˜ t is the deceleration time 14: Put t ac c ← t ful l − ˜ t . 15: Put t stop ← t ac c . 16: Put t de c ← t ac c − ˜ t . 17: end if 18: Then a ( t ) = x ′′ ( t ) ← 0 if 0 ≤ t < t de c , − a m if t de c ≤ t < t stop , 0 if t stop ≤ t < t ac c , a m if t ac c ≤ t < t ful l , 0 if t ful l ≤ t < t f . (3) 19: Kno wing a ( t ), w e can compute x ( t ) by integrati ng t wice an d using the conditions x (0) = x 0 and the v elo cit y at time 0 b eing v m . 20: Outpu t: x ( t ). 12 b et ween the case wh ere a v ehicle comes to a f u ll stop and the case where it do es not. F ull stop. First we consider the case wh ere the ve hicle (denoted b y V ) comes to a full stop, f r om t = t stop to t = t ac c . This class of tra jectories is visualised as th e blac k line in Figure 2. It turns out that this curve is completely c haracterised b y t wo parameters, whic h we choose to b e the initial s p eed v 0 and the moment when we start driving at full sp eed again, t ful l . 2 t dec t stop t acc t full t f t x ( t ) Figure 2 . Three sample tra jectories with one full stop. The optimal tra j ectory is plotted in bl ac k. The dashed green tra jectory has a smaller v alue of t ful l compared to the optimal tra jectory , whereas the dashed red tra jectory has a smal l er v alue of v 0 . The optimization criterion in th e MotionSyn th esize algorithm is to minimize the area b elo w the graph | x ( t ) | for 0 ≤ t ≤ t f . Th is is equiv alen t to minimizing the a verage distance to the in tersection. Firs t we w ill giv e an in tuitiv e explanation as to wh y it m ak es sense to contin ue at full sp eed as long as p ossible. In Figure 2 w e hav e plotted tw o alternativ e tra jectories to sh ow that they result in a larger av erage distance to the int ersection. The red dashed tra jectory is equiv alent to the optimal tra jectory , but with a low er starting sp eed ( v 0 < v m ). By starting at a lo w er sp eed, w hile fi xing t ful l , we ha v e to contin ue longer at this lo we r sp eed b efore we come to a complete stop. This means that t de c and t stop increase, wh ic h immediately in crease s the area b elo w th e graph. An other alternativ e is th e dashed green tra jectory , whic h starts at full sp eed, b ut has a lo w er v alue for t ful l . Note that t ful l is restricted by V ’s pr edece ssor. Without predecessor, it is optimal to tak e t ful l = t f , bu t if there is a predecessor (whic h apparen tly is the case for the blac k tra jectory in Figure 2), it is optimal to let b oth v ehicles ha v e the same t ful l . This is the only wa y to ensure that b oth vehicle s cross the int ersection at full sp eed, w ith m in im um d istance b etw een them. T aking a smaller v alue of t ful l , as in th e green tra jectory , means that V comes to a stop further from the intersectio n, w hic h significan tly increases the av erage distance. These arguments p ro vide an in tuitiv e explanation, but we will formalize this n o w b y explicitly computing the area b elow | x ( t ) | for our closed-form tra j ectories. First we giv e the closed-form expression for x ( t ), b y considering the fiv e su b-areas separately , and using the fact that x ( t ) is linear wh en the sp eed is constan t and qu adratic wh ile decelerating/a ccelerating. Equation (4) is easiest to und erstand when starting at t = t f 13 and constructing the tra jectory b ac kw ards to t = 0, and u s ing these auxiliary results: t stop − t de c = v 0 a m , t ful l − t ac c = v m a m , x ( t stop ) − x ( t de c ) = v 2 0 2 a m , x ( t ful l ) − x ( t ac c ) = v 2 m 2 a m . W e obtain: x ( t ) = ( t − t f ) v m for t ful l ≤ t ≤ t f , ( t ful l − t f ) v m − v 2 m 2 a m + a m 2 ( t − t ac c ) 2 for t ac c ≤ t ≤ t ful l , ( t ful l − t f ) v m − v 2 m 2 a m for t stop ≤ t ≤ t ac c , ( t ful l − t f ) v m − v 2 m 2 a m − a m 2 ( t − t stop ) 2 for t de c ≤ t ≤ t stop , x 0 + v 0 t for 0 ≤ t ≤ t de c . (4) Note that t de c follo ws fr om con tinuit y of x ( t ): t de c = 1 v 0 | x 0 | − ( t f − t ful l ) v m − v 2 0 + v 2 m 2 a m . The area b elo w the tra jectory , A v := Z t f 0 | x ( t ) | d t , is equal to: A v = t de c 2 x ( t de c ) − x 0 + v 2 0 a m + v 3 0 6 a 2 m + t ful l ( t f − t ful l ) v m + v 2 m 2 a m − v 3 m 6 a 2 m + v m 2 ( t f − t ful l ) 2 = v 4 0 + 3( v 2 m + 2 a m (( t f − t ful l ) v m + x 0 )) 2 24 a 2 m v 0 + v m 2 t 2 f − t 2 ful l + t ful l v m a m − v 3 m 6 a 2 m . (5) W e no w exploit that only the first p art of the expression for A v dep ends on the initial sp eed v 0 , as observed b efore. By taking the deriv ativ e w ith resp ect to v 0 and u sing v 0 ≤ v m it follo ws that A v is d ecreasing in v 0 , u nder the follo wing condition: ( t f − t ful l ) v m + 2 v 2 m 2 a m ≤ | x 0 | . This is exactly the “no o vercro wding” assump tio n discussed earlier, whic h no w gets quan tified: a ve hicle ente ring the con trol r egio n at f ull sp eed should h a ve enough space to come to a fu ll stop and accelerate aga in in order to reac h full s p eed at time t ful l . This p ro ves that the initial sp eed should b e tak en as large as p ossib le, i.e. v 0 = v m . No w that we ha v e established that w e should choose v 0 = v m , w e assu me this equalit y from no w on and denote the area as A (to distinguish it from A v ). Th is significan tly simplifies the expression, which no w b ecomes A = ( v m t f + x 0 ) t f − t ful l + v m 2 a m + x 2 0 2 v m . (6) 14 It is readily seen th at th e area A is n o w line arly de cr e asing in t ful l , whic h immediately pro v es that we sh ould tak e t ful l as large as p ossible to minimize A . Exactly ho w large t ful l is allo wed to b e, dep ends on th e pr edece ssor. No full stop. W e no w br iefly consider the case where V do es not come to a full stop. The analysis is quite similar, so we will m ainly fo cus on the differences. The first difference is that t stop is remo v ed from the tra jectory . Instead, we n o w ha ve that the sp eed at t = t ac c is greater than zero. Note that th is sp eed, whic h we denote by v 1 , is less than or equal to v 0 , b ecause V decelerates b et we en t de c and t ac c . Th e tra jectory x ( t ) n o w consists of at most four parts, giv en by: x ( t ) = ( t − t f ) v m for t ful l ≤ t ≤ t f , ( t − t f ) v m + a m 2 ( t − t ful l ) 2 for t ac c ≤ t ≤ t ful l , x 0 + v 0 t − a m 2 ( t − t de c ) 2 for t de c ≤ t ≤ t ac c , x 0 + v 0 t for 0 ≤ t ≤ t de c . (7) W e can eliminate the un k n o wns by using the r ela tions t ac c − t de c = v 0 − v 1 a m , t ful l − t ac c = v m − v 1 a m . The requ iremen t that x ( t ) is contin uous in t ac c leads to th e last equation that can b e solv ed to obtain t ac c . The area b elo w | x ( t ) | can now b e computed: A v = v m 2 ( t f − t ac c ) 2 + ( v 0 − v 1 ) 3 − ( v m − v 1 ) 3 6 a 2 m − x 0 t ac c − v 0 2 t 2 ac c . (8) Eliminating t ac c and differen tiating with resp ect to v 1 immediately sho ws that A v is decreasing in v 1 . Since we are trying to minimize A v , we should take v 1 as large as p ossible, i.e. v 1 = v 0 . After this substitution, all expressions s im p lify and it can again b e sho wn th at the deriv ativ e of A with resp ect to v 0 is alw a ys less than or equal to zero, where equalit y is only reac hed wh en t ac c = 0 and there is no other option for V than to accelerate immediately . This means that we should tak e v 0 as large as p ossible, whic h again imp lies th at w e should tak e t ful l as large as p ossible. It should b e noted that th e case v 0 = v m needs to b e consid er ed sep arate ly , b ecause if the conditions allo w a maximal in itial sp eed, v 1 is completely fixed : v 1 = v m − q a m ( t f v m − | x 0 | ) . This means that t ful l do es not follo w from v 0 , b ut it can b e c h osen arbitrarily (b etw een the m in im um and maximum allo wed v alues). I n this case w e ha v e t ac c = t ful l − v m − v 1 a m = t ful l − v m − v m − p a m ( t f v m − | x 0 | ) a m = t ful l − ˜ t, with ˜ t as defined in (2). 15 Implemen tation. Algorithm 4 is an implement ation of the optimal tra j ect ory for the general case. Th e formulatio n of th e algorithm is sligh tly differen t, b ecause we are using th e r esults that v 0 and t ful l should b e as large as p ossible. As argued ab o ve, an upp er b ou n d to th e time t ful l is determined by the tra jectory y of the pr edece ssor of V , and is fixed. If the crossing times differ a time B , then the time at which the predecessor starts d riving at full sp eed, t f ,y , should equal t ful l (b ecause w e wan t to tak e it as large as p ossib le), and otherwise it is simp ly t f , which is the wa y we c ho ose t ful l in lines 2-6. The astute r eader will also notice that we do not provide an explicit expression for x ( t ) in Algorithm 4. Instead, w e pro vide its second deriv ativ e, a ( t ), and the b oundary conditions. This has the adv ant age that w e ha v e one formulatio n that is v alid f or b oth cases (fu ll stop an d no full stop). On e can easily v erify that (4) (full stop) and (7) (no full stop) b oth redu ce to (3) after differen tiating t w ice, and that t de c , t stop , t ac c and t ful l as computed in Algorithm 4 corresp ond to the v alues discuss ed in the first part of th e pro of. Note that we c ho ose t stop = t ac c in case of n o full stop. Then com bining the defined times, w e obtain (3), whic h minimizes the area u nder the distance-time graph . This is exactly the same criterion as we optimize for in the MotionSyn thesize pro cedure. The only thing left to s ho w, is that all other tr a jectories satisfying the required constraints regarding maximum sp eed and acceleration, ha ve a larger av erage distance to the inte rsection than the one we obtain. Segmen t 2. This part is significantly shorter, pro ving that the obtained tra jectory is really optimal with r esp ect to the criterion of smallest a v erage distance to the inte rsec- tion. W e remin d th e reader that we explicitly exploit the p rop ert y of the p olling-based PF As that eac h vehicle n eeds to decele rate (and p ossibly stop) at most once. Intuit- iv ely , the optimalit y is quite apparent : in order to minimize the av erage distance to the intersec tion, a v ehicle en tering the con tr ol region needs to driv e at fu ll sp eed as long as p ossib le. Assume that x ( t ) is a tra jectory defin ed b y (4) with v 0 = v m and t ful l as large as p ossible. W e no w consider an alternativ e tra jectory ˜ x ( t ) 6 = x ( t ). W e compare x ( t ) with ˜ x ( t ) on the five p arts of the tra jectory . • F or 0 ≤ t ≤ t de c it is completely obvio us that | ˜ x ( t ) | ≥ | x ( t ) | , b ecause ˜ x (0) = x (0) = x 0 and ˜ x ′ ( t ) ≤ x ′ ( t ) = v m for 0 ≤ t ≤ t de c . • W e now turn to the last part of the tra jectory . F or t ful l ≤ t ≤ t f it is w e h a v e ˜ x ( t ) = x ( t ) b ecause t ful l w as d efined as the largest p ossible v alue for t where V should start driving at full sp eed. • Lo oking at the part b efore this one, t ac c ≤ t ≤ t ful l , w e see that | ˜ x ( t ) | ≥ | x ( t ) | b ecause ˜ x ′ ( t ful l ) = x ′ ( t ful l ) = v m and ˜ x ′′ ( t ) ≤ x ′′ ( t ) = a m . • The p erio d t stop ≤ t ≤ t ac c is also trivial, b ecause ˜ v ( t ) ≥ v ( t ) = 0 here, meaning that | ˜ x ( t ) | ≥ | x ( t ) | . • This lea v es us with the last part, whic h is the second p erio d t de c ≤ t ≤ t stop . W e hav e already established that | ˜ x ( t de c ) | ≥ | x ( t de c ) | and | ˜ x ( t stop ) | ≥ | x ( t stop ) | . Since ˜ x ′ ( t de c ) ≤ x ′ ( t de c ) = v m and ˜ x ′′ ( t ) ≤ x ′′ ( t ) = a m , it also follo ws th at | ˜ x ( t ) | ≥ | x ( t ) | in th is area. The conclusion is that for all t ∈ [0 , t f ] we ha ve | ˜ x ( t ) | ≥ | x ( t ) | , which implies that Z t f 0 | ˜ x ( t ) | d t ≥ Z t f 0 | x ( t ) | d t. This p ro ves that the path x ( t ) is optimal with resp ect to the criterion of the Motion- 16 Synt hesize pr ocedur e. Since it has also b een p ro ven in Miculescu an d Karaman (2014) that the MotionSynt hesize algorithm yields an optimal path, b oth algorithms must return the same path. Remark 1. Although the exhaustiv e and gated PF A ensure that th er e is at most one p erio d of decelerati on, p ossibly a stop, and accelerati on, for other disciplines, like th e Batc h Algorithm or the k -limited disciplin e (which is also based on p olling mo dels), this migh t not b e the case, and the p erio d from t 0 unt il t f migh t ha v e to b e s p lit in more than fiv e differen t p eriod s . A similar t yp e of sp eed p rofile algorithm is still p ossible, bu t is m ore in v olv ed and therefore omitted in in terest of sp ace and clarit y of the algorithm and argumen tation. So, Algorithm 4 has the same desirable prop erties as the MotionSyn thesize pro ced- ure, but is compu tat ionally m uc h less exp ensiv e and also pro vides intuition on the shap e of the tra jectories. A visualization of such tra jectories can b e foun d in Figure 3. W e can also f orm ulate such an alternativ e for Algorithm 3, wh ere w e, again, p ut t 0 = 0 to ease the n ota tion. W e allo w for general v 0 no w. In fact, this is essen tial to this algorithm, b ecause a v eh icle might start decelerating immed iately up on arriv al in the S P A part of the con trol region. W e assume that a follo wing vehicle h as decelerate d accordingly , if necessary , in the PF A part of the con trol r egi on. In pr act ice, either v ehicle-to-v ehicle (V2V) or con troller-to-v ehicle (V2I) comm unication might b e used to ensure th is sp eed adjustment. The general structure of Algorithm 3 is similar to Algorithm 4 . Also in this case, the acceleratio n is p iec e-wise constan t, yet there are at most th ree c hanges in the accele ration. W e shortly describ e those four p arts of the arriving tra jectory . • Decelerat ion at maxim um rate fr om t 0 unt il t cr uise ; • No acceleration or d eceleration from t cr uise unt il t ac c ; • Accelerati on at maxim um rate fr om t ac c unt il t ful l ; • No acceleration or d eceleration from t ful l unt il t f . This is also visib le in Figure 3. Note that we start decelerating as so on as p ossible, b ecause w e w an t to cru ise at a relativ ely lo w sp eed. If we would not cruise at a lo w sp eed, then w e wo uld h a ve to decelerate more (as w e co v ered a longer distance at a high sp eed). S o w e decelerate maximally for some time, con tinue at a constant sp eed for some time and then accelerate maximally (taking adv an tage of the low er cruising sp eed as long as p ossible). Th e resulting algo rithm is formulat ed in Algorithm 5 and equiv alence with Algorithm 3 is p ro ve n thereafter. Lemma 3.3. Algo rithm 3 and Algorithm 5 ar e e quivalent in the sense that b oth min- imize the absolute value of the applie d ac c eler ation acr oss the time p erio d t 0 to t f . Pr o of. W e again split the pro of in t w o parts, but no w we first prov e optimalit y of the form of the tra jectory and then we c hec k th e computation of t cr uise , t ac c and t ful l in Algorithm 5. Segmen t 1. Th e optimal tra jectory consists of at most fou r p arts. Th e last part, from t ful l unt il t f is determined in the same w a y as sho wn in the p roof of Lemma 3.2. The fi rst three p arts of the tra j ect ory are split in the follo wing wa y: decelerating (un til t cr uise ), cruising at a fixed sp eed (until t ac c ) and accelerating (unt il t ful l ), where 17 Algorithm 5 closed-form solution to Algorithm 3. 1: Input: x 0 , v 0 , t f , t f ,y , and y . 2: if t f − t f ,y = B the n 3: Consider tra jectory y an d determine the time at whic h the v eh icle con tinues at fu ll sp eed. Call this time t ful l . 4: else 5: Put t ful l ← t f . 6: end if 7: Put t 1 ← a m t f + v 0 − v m 2 a m − q 4 a m | x 0 | + ( a m t f − v 0 ) 2 − 2( a m t f v m + v 2 0 ) − 4 a m ( t f − t ful l ) v m + 2 v 0 v m − v 2 m 2 a m (9) 8: Put t 2 ← a m t f + v 0 − v m 2 a m + q 4 a m | x 0 | + ( a m t f − v 0 ) 2 − 2( a m t f v m + v 2 0 ) − 4 a m ( t f − t ful l ) v m + 2 v 0 v m − v 2 m 2 a m (10) 9: Put t cr uise = t 1 and t ac c = t 2 . 10: Then, a ( t ) = x ′′ ( t ) ← − a m if 0 ≤ t < t cr uise , 0 if t cr uise ≤ t < t ac c , a m if t ac c ≤ t < t ful l , 0 if t ful l ≤ t < t f . (11) 11: Kno wing a ( t ), w e can compute x ( t ) by integrati ng t wice an d using the conditions x (0) = x 0 and v (0) = v 0 . 12: Outpu t: x ( t ). the first and last p erio d ma y ha v e zero length. W e w ant to minimize the area under the absolute v alue of the acc eleration-time graph. W e d ecel erate as early as p ossible and accele rate as late as p ossible, and b oth at the maximum rate. If we would n ot do one of these thr ee th ings, it means that w e would ha v e to decelerat e more as w e driv e at a high sp eed longer (and as e.g. th e a v erage sp eed is fi xed, namely x 0 /t f , we w ould ha v e to decelerate more to a lo w er sp eed). S o, indeed the firs t three parts of a tra j ect ory consist of decelerating at maxim um r ate , th en cruisin g at a fixed (and relativ ely lo w) sp eed and then accelerat ing at maxim um rate. Segmen t 2. As argued in the pro of of Lemma 3.2, the time t ful l is determined b y the tra jectory y of th e predecessor of V and is fixed. So t ful l is c hosen as in lines 2-6. Kno wing this, w e can compute the remainder of the tra jectory . W e can compute the tra v ersed distance if we immed iately decelerate for a time t an d accelerat e as late 18 0 5 10 15 20 25 0 20 40 60 80 100 t x(t) Figure 3. Algorithm 4 (solid lines) and Algorithm 5 (dashed lines) for several veh icles wi th t (s) on the horizon tal axis and | x ( t ) | (m) on the vertical axis for sev eral vehicles. as p ossible f or a time t + v m /a m − v 0 /a m (b ecause it m igh t b e that v 0 6 = v m ), wh ich is v 0 t − 1 2 a m t 2 + v m − a m ( t + v m a m − v 0 a m ) t + v m a m − v 0 a m + ( t f − t ful l ) v m + v m − a m ( t + v m a m − v 0 a m ) t f − 2 t − v m a m + v 0 a m + 1 2 a m t + v m a m − v 0 a m 2 . (12) Equating (12) with | x 0 | and solving for t , results in tw o p ositiv e v alues. T h e smaller one is giv en as t 1 in (9) and the larger one as t 2 in (10). So w e can put t cr uise = t 1 and t ac c = t 2 . Then combining the defined times, we obtain (11 ). With th is c hoice of times, we see that w e minimize the area under the absolute v alue of the acce leration-time graph. T his is exactly the same criterion as w e optimize for in Algorithm 3, so the t wo algorithms yield th e same tra jectory . Remark 2. Algorithms 3 and 5 are solv able, if the PF A is regular, the cont rol region is su fficien tly big and the cars are sufficien tly far apart from eac h other when en terin g the con trol r egion (as m entioned b efore). T h e regularit y of the PF A ensur es that the v ehicles k eep driving b ehind eac h other (and d o not ha v e to o vertak e). Our closed-form expressions in Algorithm 5 pro vide immediate quan titativ e in s igh t in the conditions required f or solv abilit y . In this case, lines 2 to 6 are sufficient to d etermin e the influence of the predecessor of the v ehicle that we are cu r ren tly plannin g. The sufficientl y b ig con tr ol region ensures that prop er t ful l , t 1 and t 2 can b e found, in suc h a w a y th at v ehicles do not colli de, whic h is also the case for the lost condition on the distance b et ween cars wh en they ente r the control region. A full p r oof w ould b e similar to the pro of of Lemma (IV.4) in Miculescu and Karaman (2016) and wo uld follo w along the same lines. A visualization of tra jectories generated by Algorithms 4 an d 5 is depicted in Fig- ure 3 . 19 4. P erformance Analysis Ha vin g cov ered th e t wo main ingredien ts of the mo del, w e turn to th e p erformance analysis. Th e tw o measures that w e consider are mean dela y and fairness. In ord er to obtain results on mean dela y and fairness, w e firs t establish a link b et we en th e mo del w e describ ed so f ar and p olling mo dels. 4.1. Pol ling Mo del P olling mo dels are well -studied m athemat ical ob jects repr esenting queueing mo dels with m ultiple queues sharing a single server. F or an o verview of applications w e refer to Boon, v an der Mei, and Winands (2011) and for an ov erview of commonly used metho ds we refer to Vishnevskii and Semenov a (2006). A general p olling mo del has n queues, eac h with a distinct arr iv al pro cess (usually a P oisson pro cess) with parameter λ i , whic h are assumed to b e indep end en t f rom eac h other. E ach queue has its own generally distribu ted service time from w hic h is sampled indep endentl y . A single serv er is visiting eac h of the n queues in a certain (p ossibly random) ord er to serve customers. After a certain p erio d at a queue the serv er switc h es to the next queue. W e assume that this switc hing tak es zero time. Ins tead, w e assu m e that if we switc h to a queue that is non-empt y , a setup is p erformed. Otherwise, w e do not p erf orm a setup and contin ue immed iately to the next queue (see e.g. S ingh and Sriniv asan 2002). When all queues w ere empt y b efore th e arriv al of a vehicle, we assume that a setup wa s started at the most recen t d eparture ep o c h. This is a feature that h as not b een studied b efore in th e p olling literature, but that naturally represen ts th e b eha viour of our PF As. W e will analyze th e p erform an ce of PF As regarding dela y through p olling mo dels. Although we tak e a v ertical queueing approac h in th ose p olling mo dels (i.e. the vehicle s are all stopp ed at the stop line at the intersect ion, o ccup ying n o s pace) , the in tersection con tr ol algorithm provides a one-to-one relation b et w een the v ertical qu eueing mo del and the PF As. W e visualize this in Figure 4, where the blac k line represents a self- driving ve hicle, and the red dotted line represents the corr esp ond ing ‘vehicle ’ in the v ertical queueing mo del. Both ‘vehicl es’ enter the control region at the same time (so also the earliest p ossib le arr iv al time at the intersecti on is the same for b oth). They also ha v e th e s ame ser v ice time, b eca use as so on as the vehicles start to cross the intersectio n th ey h a v e the s ame tra jectory . So the d ela y for b oth v ehicles, the difference b et w een earliest p ossible crossing time and actual crossing time, is the same, as visu aliz ed in Figur e 4. T o mak e the connection b etw een the tr affic mo del and p olling mo dels more ex- plicit, w e argue how the traffic m odel translates to a p olling mo del. Th e time B in b et ween v ehicles from the same stream accessing the in tersection is the service time in the p olling mo del, whereas the clearance time S is th e setup time in the p olling mo del. Whic h qu eue or lane is to b e s er ved is d ecided up on b y the service discipline, resp ectiv ely the PF A. So, our in tersection m odel p recisely fi ts the framew ork of p olling mo dels. W e w ill use the ideas and results already obtained f or p olling mo dels to giv e a sound analysis of th e traffic mo del discussed so far. F rom no w on in th is section, w e will b e fo cusing on th e p olling mo del and related resu lts, therefore us in g queueing terminology . 20 0 2 4 6 8 10 −20 0 20 40 60 80 100 t x(t) delay Figure 4. Vi sualization of the link b et ween the traffic mo del with PF As and poll ing mo dels. The black line represen ts a self-dr iving vehicle, and the red dotted l ine represent s the corresp onding ‘vehicle’ in the ve rtical queueing model. 4.2. Me an Delay The sp ecific assum ptions result in a p olling mo del that d oes n ot fall in to the stand ard framew ork, and a fully analytical solution is d ifficult (if not imp ossible) to deriv e. So, w e fo cus on app ro ximations, b eing muc h faster and still accurate, and refrain from pro viding an analytical solution. W e fo cus on obtaining appro ximations f or the mean dela y that still requir e some analytical r esults, but that are easier to derive than the full d istribution of the dela y . W e start with a defin ition of d ela y . T h e dela y D i at lane i is defined as the actual time of a car crossing the in tersection min us the free-flo w time in which a car could cross the in tersection. B i denotes the service time of queue i , whereas S i denotes th e setup time when w e arrive at qu eue i . W e ha ve P oisson arriv als with r ate λ i and define ρ i = λ i E [ B i ] and ρ = P i ρ i , wh er e ρ is similar to the v eh icle -to-capacit y ratio. The appro ximations that we prop ose for the mean dela y are all of the form, E [ D P i,app ] = K P 0 ,i + K P 1 ,i ρ + K P 2 ,i ρ 2 1 − ρ , (13) lik e in Bo on et al. (201 1 ), w h ere K P j,i are constan ts that are y et to b e determined and P d enotes the PF A. Th e constants, that might dep end on P and the arriv al distribution (due to sp ace limitations w e only consider P oisson arriv als), are d eriv ed through requiring (13) to b e exact in v arious limiting cases. These three cases are th e follo wing: (13) should matc h the mean dela y for queue i in the ligh t-traffic limit, the deriv ativ e of the ligh t-traffic limit and the hea vy-traffic limit. Then we ha v e a system of three equations with three unkn owns, whic h w e can solv e to fi nd the constan ts K P j,i . These app ro ximations are based on the fr amew ork describ ed in Bo on et al. (2011), whic h is in tu rn based on id eas dev elop ed in Reiman and Simon (1988). Note that (13) is only v alid for ρ < 1, wh ic h is the condition for the p olling mo del (and therefore also for our PF As) to b e stable. W e start with derivin g the ligh t-traffic limit for general service time and setup time distributions for the mean d ela y . The ligh t-traffic here corresp onds to th e case wh ere P (serv er not working and n ot s ett ing u p) ↑ 1 , whic h means that b oth λ i E [ B i ] and λ j E [ S i ] should b e close to zero. W e d enote 21 with X r es i the residual or o vershoot of the r andom v ariable X with mean E [ X r es ] = E [ X 2 ] / (2 E [ X ]). Then we ha ve the follo wing lemma. Lemma 4.1. The light-tr affic limit for the me an delay, u p to and including first-or der terms, for al l discusse d PF As, satisfies E [ D LT i ] = ρ i E [ B r es i ] + X j 6 = i ρ j ( E [ B r es j ] + E [ S i ]) + X j 6 = i λ j E [ S i ] E [ S r es i ] . (14) Pr o of. W e consider what happ ens in eac h phase of the cycle and argue what the w aiting time is of a customer arriving at queue i . W e hav e n different visit p erio ds, num b ered j = 1 , ..., n . If j = i , w e only ha v e to w ait for a residual service time of the cus tomer that is cur r en tly in service (using the P AST A prop ert y of P oisson arriv als). Th is h app ens with probabilit y λ i E [ B i ] = ρ i . The con tr ibution to the wait ing time is th us ρ i E [ B r es i ]. I f i 6 = j , w e hav e to wa it for the residual service time of the cus tome r that is in service and for the setup time to our o w n qu eue i . This all happ ens w ith probabilit y λ j E [ B j ] = ρ j , so the con tribution to the waiting time is ρ j ( E [ B r es j ] + E [ S i ]). The setup p erio ds: w e again hav e j = 1 , ..., n . Th e case i = j d oes not o ccur, as we do n ot ha v e a setup time in that case (we tak e th e customer immediately into service). The cases i 6 = j , occur with rate λ j E [ S i ] (whic h con v erges to zero) and if we arrive during suc h a p erio d, we ha ve to wa it for a r esidual setup time. So the con tribution is λ j E [ S i ] E [ S r es i ]. Cases where w e see more than one customer wh en we arriv e in the system are all of ord er O ( ρ 2 ) or higher, so we do not consider th ose terms. Summing all p ossibilities, we arriv e at (14 ). The hea vy-traffic limit of the mean dela y do es dep end on the PF A. In hea vy traffic, the b ehavio ur of our PF As and regular p olling mo dels is th e same. Consequently , the hea vy -traffic limits for the exhaustive and gated PF As are the same as the heavy- traffic limits for the exhaustiv e and gated disciplines in e.g. Bo on (201 1 ), where p olling mo dels with s w itc h-o v er times (rather th an setup times) are presented. I ndeed, if the lengths of the setups and switc h-o v ers are the same, the p olling mo del with sw itc h- o vers (and without setup times) is the same as the p olling mo del with setup times (but no s w itc h-o v er times), b ecause eac h setup will b e p erformed in heavy traffic (as all queues are non-empty wh en the server visits them) and can b e seen as an ‘ordinary’ switc h -o v er time. This implies that w e can u se the results from Bo on (2011), so E [ D H T , P i ] = ω P i 1 − ρ + o ((1 − ρ ) − 1 ) , (15) with P denoting the PF A, where ω exh i = 1 − ˆ ρ i 2 σ 2 P n j =1 ˆ ρ j (1 − ˆ ρ j ) + n X j =1 E [ S j ] , (16) for the exhaustiv e PF A, with σ 2 = E [ B 2 ] / E [ B ] (in case of Po isson arriv als) and ˆ ρ i = 22 ρ i /ρ and ω g at i = 1 + ˆ ρ i 2 σ 2 P n j =1 ˆ ρ j (1 + ˆ ρ j ) + n X j =1 E [ S j ] (17) for the gated PF A. The general appr o ximation in (13) is now ready to b e used. W e obtain the follo wing theorem. Theorem 4.2. The me an delay exp erienc e d for PF A P c an b e appr oximate d with Equation (13 ) , wher e K P 0 ,i = 0 , K P 1 ,i = ˆ ρ i E [ B r es i ] + X j 6 = i ˆ ρ j ( E [ B r es j ] + E [ S i ]) + X j 6 = i ˆ λ j E [ S r es i ] E [ S i ] , (18) K P 2 ,i = ω P i − K P 1 ,i , with ˆ λ i = ˆ ρ i / E [ B i ] . Pr o of. As mentioned b efore, we put thr ee conditions on the constan ts K P j,i , j = 0 , 1 , 2. These are the follo win g E [ D P i,app ] ρ =0 = E [ D LT i ] ρ =0 , d dρ E [ D P i,app ] ρ =0 = d dρ E [ D LT i ] ρ =0 , (1 − ρ ) E [ D P i,app ] ρ ↑ 1 = E [ D H T , P i ] . Using L emm a 4.1 and Equation (15) , K P 0 ,i = 0 , K P 0 ,i + K P 1 ,i = ˆ ρ i E [ B r es i ] + X j 6 = i ˆ ρ j ( E [ B r es j ] + E [ S i ]) + X j 6 = i ˆ λ j E [ S r es i ] E [ S i ] , K P 0 ,i + K P 1 ,i + K P 2 ,i = E [ D H T , P i ] = ω P i . (19) It can easily b e seen that (19) reduces to (18). Remark 3. The ab o v e men tioned results for mean d ela y can readily b e extended to results for the m ean n umber of ve hicles in th e queue, using L ittl e’s la w. T o gether with the sp eed regulation algorithm, the p h ysical length of the queue can b e calculated (for example if w e d efi ne the last vehicle that has already decelerated to b e in the queue). This w ould giv e information ab out e.g . spillback of th e inte rsection to other in tersections. In general th e appro ximations work fi n e f or all discussed PF As, as can b e seen in Figure 5 (comparing the solid lines (the exact results) and the dashed lines (the 23 appro ximations)). W e presen t examples where we pu t v m = 15 m/s, a m = 4 m/s 2 , l = 5 m and s = 10 m and where tw o lanes cross eac h other. W e consider tw o cases where the load on b oth lanes is split differentl y: on e case wh ere ρ 1 = ρ 2 (referred to as b eing sym metric) and one case w here ρ 1 = 3 ρ 2 (referred to as b eing asym- metric). F o llo wing T ac het et al. (2016), we put B = 1 s and S = 2 . 375 s. Th e t wo discussed PF As r esult in the Figure 5, wh ere also, as a b en chmark, the Batc h Al- gorithm from T ac het et al. (2016) is considered , with a maxim um b atc h size of 100. The app ro ximations are also go od f or all other settings w e sim ulated. 0.2 0.4 0.6 0.8 0 20 40 60 80 100 ρ E[D] batch gated exhaustiv e 0.2 0.4 0.6 0.8 0 20 40 60 80 100 ρ E[D] batch gated exhaustiv e Figure 5. Mean delay experienced by an arbitrary car for the symmetric case (top) and asymmetri c case (bottom). T he soli d lines represen t simulation results and the dashed lines approximations. W e see that the exhau s tiv e PF A p erforms really well, if we fo cus on mean dela y , compared to the other PF As. This can also b e un derstoo d from the h ea vy-traffic limits (16) and (17). T he p erf ormance of th e Batc h Algorithm is similar to that of the gated PF A, except for higher v alues of ρ , wh ich is du e to th e maxim um b atc h size of 100. T his maxim um b atc h size causes a lo wer maximum capacit y for the Batc h Algo rithm than for the exhaustiv e and gated PF A and th erefore, the Batc h Algorithm has a s h arp increase in mean dela y earlier th an the other t w o PF As. W e exp ect the exh au s tiv e PF A to b e (v er y close to) optimal with r esp ect to the mean dela y . This optimalit y w as, to some extent, already observ ed in e.g. New ell (1969), Levy , Sidi, and Bo xma (1990) and W u , Y a n, and Abbas-T urki (2013). 4.3. F a irness In order to s h o w that the exhaustiv e PF A is n ot the b est for all p erformance metrics w e consider fairness in this subs ect ion. W e use the definition of fairness for p olling 24 mo dels, denoted with F , as introdu ced in Sh apira and Levy (2016), F = E [ N ahead ] E [ N total ] , where N ahead denotes the num b er of cars an arbitrary car sees u p on arriv al and that are serv ed ahead of it; and where N total denotes the total n umb er of cars an arbitrary car sees up on arriv al. In words this means that we quan tify the p ercenta ge of cars that did n ot o vertak e an arbitrary car (on an intersect ion-wide b asis). W e present sim u lation results for fairness for the same set of examples as for the mean d ela y . 0.2 0.4 0.6 0.8 0.70 0.75 0.80 0.85 0.90 0.95 1.00 ρ F air ness batch gated exhaustiv e 0.2 0.4 0.6 0.8 0.70 0.75 0.80 0.85 0.90 0.95 1.00 ρ F air ness batch gated exhaustiv e Figure 6. F airness experienced by an ar bi trary car for the symmetric case (top) and asymmetric case (b ot- tom). Considering fairness, w e see once more that the gated PF A is close to the Batc h Algorithm for v alues of ρ that are not to o high. The increase of fairness for h igh v alues of ρ for the Batc h Algorithm is due to th e maxim u m batc h s ize of 100. The exh au s tiv e PF A is worse on fairness, but is still ab o v e 75%. It seems that a lo w mean dela y results in a relativ ely lo w f airness, showing a p otenti al n eed to b ala nce the tw o p erformance measures, whic h is to some extent visible in the incr ease of fairness for the Batc h Algorithm and high v alues of ρ . 25 5. Comparison tradit ional T ra ffic Light and PF As The goal of th is sectio n is to p ro vide a comparison b et ween traditional traffic lights and PF As on basis of dela y . As a measure for the trad itional traffic light we u se the traffic simulato r SUMO. W e will consider t wo scenarios in SUMO: one w ith fi xed con tr ol and one with adaptive con trol (based on so-called time loss in th e SUMO User Do cumen tation). W e will compare these t wo scenarios w ith the exh austiv e PF A. W e again consider t wo examples where t wo lanes cross eac h other and the v ehicle to capacit y ratio is in the first examp le the same on b oth lanes, whereas in the second example the ratio b etw een the loads on the lanes is 1 : 3. F or the exhaus tive PF A w e again p ut B = 1 s and S = 2 . 375 s. F or the fixed cont rol sim ulation in SUMO and the first example we assume a green p erio d for b oth lanes of 22 s and an am b er p erio d of 3 s; for the second example we pic k green p eriod s of 11 and 33 s and am b er p erio d s of length 3 s. Note th at some of the results for the fi xed con trol in Figure 7 could b e sligh tly impro ve d by adapting the length of the green p erio d. F o r the adaptive con tr ol in SUMO we assume a maxim um green p erio d duration of 45 s and an am b er p erio d of 3 s f or the symmetric example and a m aximum green of 22 and 68 s for the asymmetric case. Note that we d o not h a ve to define the v ariable B in SUMO, as the v ehicles themselve s will decide what B is. The dela y in SUMO for the fixed and adaptiv e control is obtained in th e follo wing wa y: w e compute th e mean time sp en t in th e system for all v ehicles and subtract th e mean time v ehicles sp ent in th e system under free-flo w conditions (i.e. putting the traffic ligh t at green for one lane all the time). W e tak e exactly the same arriv als for all three scenarios. 0.1 0.2 0.3 0.4 0.5 0 10 20 30 40 50 ρ E[D] SUMO − fixed SUMO − adaptive exhaustiv e 0.1 0.2 0.3 0.4 0.5 0 10 20 30 40 50 ρ E[D] SUMO − fixed SUMO − adaptive exhaustiv e Figure 7 . Mean delay for an arbitrary car for traditional traffic ligh ts (represen ted by SUMO) and the exhaustiv e PF A for the symmetric example (top) and the asymmetric case (bottom). 26 W e see in Figure 7 that th ere is quite a difference b et ween either the fi xed cycle traffic light or the adaptiv e traffic ligh t, and the exhaustiv e PF A. T o some extent, this w as also obs erv ed in T ac het et al. (2016). The capacit y of the intersectio n for th e latter case is almost t wice as high as for the traditional tr affic light , sho wing a h uge p otent ial in resolving congestion. This is mainly due to the sp eed regulation of v ehicles, w hic h increases the sp eed of v ehicles crossing the intersec tion, but also d ue to the scheduling strategies of the PF A. 6. Conclusion and Discussion W e h a ve sho wn th at signifi cant gains can b e obtained compared to no wada ys traffic when sp eed r egulat ion and P F As can b e emplo yed and ha ve giv en w a ys to decrease mean d elay on intersect ions. This h as b een sho w n through a connection b et ween p olling mo dels and PF As. It seems that the exhaustiv e PF A is close to optimalit y with resp ect to m ean dela y . Ho wev er, the exhaustiv e PF A exhibits relativ ely p o or fairness c haracteristics. It might b e w orth while to fi nd a balance b etw een mean dela y and (e.g.) fairness in order to obtain some kind of optimal setting for th e PF A. A p ossibilit y hereto migh t b e the so-calle d k -limited discipline in p olling mo dels, where for eac h lane an upp er b ound to the plato on size is s et. Intuitiv ely , the k -limited discipline is similar to the exhaustive discipline, except for this maxim um size of the plato on. In pr inciple our PF As could b e used in no wada ys traffic as well. The only require- men t is that it must b e known on an intersecti on wide basis in wh ic h order the vehicle s arriv e. The requiremen t th at we can con trol the sp eed of arriving vehicl es is not needed to execute the PF As. This assu mption wo uld only play a role in what the v ariables B and S would lo ok like . But ev en then, the scheduling part of a PF A might still b e used. Using some kind of sp eed advisory system for con v en tional v ehicles, it might b e p ossible to come close to the p erformance of the PF As based on self-drivin g vehicles. A futur e direction of researc h is to inv estigate more r ealistic inte rsection scenarios, y et we exp ect similar results. Dep ending on th e extension, our results readily apply , if at most one stream of vehicles is allo we d to cross the intersecti on, or need to b e generalized. W e also would like to extend our appr o ximations to obtain analytical results for fairn ess. W e hav e stud ied an isolated in tersection, where ve hicles arr iv e individ ually in the con tr ol region. In a netw ork of in tersections there are sev eral complications. Firstly , the arriv al pro cesses of v eh icle s b ecome dep endent. Moreo ver, the int erplay b et wee n v arious int ersections is non -trivial. Alr eady f or a tand em of fi xed cycle traffic ligh t in tersections, it is d ifficult to find a goo d green wa ve , see e.g. Oblako v a et al. (201 7 ). Our PF As are muc h less strict on e.g. the cycle length, imp osing an ev en more difficult task of b alancing a whole net work of int ersections. On ce more, the k -limited PF A (ha ving a fix ed maximum cycle length) migh t prov e to b e an outcome in this resp ect. A study on h ow realistic our prop osed mo dels are, might also b e relev an t. W e assume e.g. that eac h v ehicle is able to p erfectly match the cr iteria we set in the sp eed regulation assumptions. F or example, there might b e some uncertaint y in the con trol of a s elf-dr iving vehicle. A notion like string-stabilit y of a plato on of v ehicles (see e.g. S w aro op and Hedric k 1996) might b e inv estigated for our pr oposed m odels. 27 Ac knowledgmen ts W e wo uld lik e to thank Johan v an Leeuw aarden, Onno Bo xma, Wim v an Nifteric k and S erge Ho oge ndo orn for interesti ng d iscussions. F unding This work w as supp orted by NW O u nder Gran t 438-1 3-206. References Bo on, M.A.A. 2011. “Polling mo dels: from theory to tr a ffic intersections.” PhD thesis, Eind- hov en Univ ersity o f T ec hnology . Bo on, M.A.A., R.D. v a n der Mei, and E .M.M. Winands. 2011. “Applications o f p olling sys - tems.” Surveys in Op er ations Rese ar ch and Management Scienc e 16 (2 ): 67 –82. Bo on, M.A.A., E.M.M. Winands, I.J.B.F. Adan, and A.C.C. v an Wijk. 201 1 . “Close d-form waiting time approximations for p olling sy stems.” Performanc e Evaluation 68 (3): 290– 306. Darro ch, J .N. 1964 . “On the tr affic light queue.” The Annals of Mathetic al Statistics 35: 380 – 388. Dib, W., A. Chasse, P . Moulin, A. Sciarr etta, and G. Co rde. 2014 . “ Optimal energ y manag e - men t for a n electric vehicle in eco-driving applications.” Contr ol Engine ering Pr actic e 29: 299–3 07. Dresner, K., and P . Sto ne. 20 08. “ A multiagent approa c h to autonomous intersection manage- men t.” Journal of Artificial Intel ligenc e R ese ar ch 31: 59 1 –656. Helbing, D., I. F ark as, and T. Vicsek. 2 000. “Simulating dynamical features of escap e panic.” Natur e 40 7: 487– 4 90. Helbing, D., and A. Mazloumian. 2009 . “O pera tio n regimes and slow er -is-faster effect in the control of traffic intersections.” The Eur op e an Physic al Journal B-Condense d Matt er and Complex Systems 70 (2): 2 57–274. Ko c kelk oren, L.M.C. 2018 . “Centralized merge cont rol for FLEE T, a mater ial ha ndling A GV system.” Ma ster’s thesis, E indho ven University of Te c hnology . Lawitzky , A., D. W ollherr, and M. Buss. 2013. “Energy optimal control to a pproach traffic lights.” In Intel ligent R ob ots and Systems ( IR OS), 2013 IEEE/ RSJ International Confer- enc e on , 438 2–4387. IEEE . Levy , H., M. Sidi, a nd O.J . B oxma. 1990. “Dominance relatio ns in p olling systems.” Queu eing Systems 6 (1): 155– 171. Liu, M., M. W ang, and S. Ho ogendo orn. 2019. “O ptimal plato on tra- jectory planning approach at arterials.” T r ansp ortation R ese ar ch R e c or d https: //doi.or g/10.1177/0361198119847474 . Miculescu, D., and S. K araman. 201 4. “Polling-systems-base d control of high-p erformance prov ably-safe autonomous intersections.” In IEEE 53r d Annual Confer enc e on De cision and Contr ol (CDC) , 1417– 1423. IEEE. Miculescu, D., and S. Ka raman. 201 6. “Polling-sy s tems-based a utonomous v ehicle co ordina tion in tra ffic intersections with no tr affic s ignals.” arXiv pr eprint:1607. 07896 . Milan´ es, V., J . P´ erez, E . Oniev a, and C. Gonz´ alez. 2 0 10. “Controller for urban intersections based on wirele s s c o mm unica tions and fuzzy logic.” IEEE T r ansactions on In t el ligent T r ans- p ortation Systems 11 (1): 243–2 48. Newell, G. F. 19 65. “Approximation metho ds for queues with application to the fixed-cycle traffic light.” SIAM R eview 7 (2): 223–2 40. Newell, G.F. 1 9 69. “Prop erties of vehicle-actuated signals: I. o ne - w ay streets.” T r ansp ortation Scienc e 3 (1): 30 –52. 28 Oblako v a, A., A. Al Hanbali, R.J. Boucherie, a nd J.C.W. v an O mmer en. 2 017. “Green wa ve analysis in a tandem of traffic-light intersections.” . Papageorgiou, M., C. Dia k aki, V. Dinop oulou, A. Kotsialo s, a nd Y. W ang. 2003 . “Review of road traffic control strategies.” Pr o c e e dings of t he I EEE 91 (12): 2 0 43–2067 . Rafaeli, A., G. Barr o n, and K. Haber. 2002. “The effects o f queue structure on a ttitudes.” Journal of Servic e Rese ar ch 5 (2): 1 25–139. Reiman, M.I., and B. Simon. 1988 . “ An interpolatio n approximation for queueing sys tems with Poisso n input.” Op er ations Rese ar ch 3 6 (3): 4 54–469. Resing, J.A.C. 19 93. “Polling systems and multit yp e branching pro cesses.” Queu eing Systems 13 (4): 409 –426. Rios-T orres, J., and A.A. Malikopo ulos. 2017 . “A sur vey on the co ordinatio n of co nnected and automated vehicles at in tersectio ns and merging at highw ay on-ra mps.” IEEE T r ansactions on Intel ligent T r ansp ortation S ystems 1 8 (5): 1 066–107 7. Shapira, G., and H. Levy . 2 016. “On fairness in p olling sy stems.” Annals of Op er ations R ese ar ch https: //doi.or g/10.1007/s10479- 016- 2247- 8 . Singh, M.P ., and M.M. Sriniv asan. 2002. “Exa ct analysis of the state-dep enden t p olling mo del.” Queueing Systems 41 (4): 3 7 1–399. Swaroop, D., and J .K. Hedrick. 1996 . “String stability of interconnected systems.” IEEE T r ans- actions on Automatic Contr ol 4 1 (3): 349– 3 57. T ac het, R., P . Santi, S. So b olevsky , L. I. Reyes-Castro, E. F razzoli, D. Helbing, a nd C. Ratti. 2016. “Revisiting street in tersectio ns us ing slot-based sys tems.” PloS ONE 11 (3): e014 9607. https: //doi.or g/10.1371/journal.pone.0149607 . T anner, J. C. 1962 . “A theor etical analysis of de lays at an uncontrolled in tersection.” Biomet- rika 49 (1/2 ): 16 3–170. v an Leeuw aarden, J. S. H. 20 06. “Delay analysis fo r the fixed-cyc le traffic- ligh t que ue.” T r ans- p ortation Scienc e 40 (2 ): 189– 1 99. Vishnevskii, V.M., and O .V. Semeno v a. 200 6. “Mathema tical metho ds to study the p olling systems.” Automation and Remote Contr ol 6 7 (2): 173– 220. W u, J ., F. Y an, and A. Abbas - T urk i. 201 3 . “Mathematical pro of of effectiveness of plato on- based traffic control a t intersections.” In Intel ligent T r ansp ortation Syst ems-(ITSC), 2013 16th Intern atio nal IEEE Confer enc e on , 720–7 25. IEEE. 29
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment