예측과 통신 공동 설계로 초고신뢰 저지연 통신 구현
본 논문은 모바일 디바이스가 미래 상태를 예측하여 사전에 전송함으로써 사용자 체감 지연을 감소시키는 예측‑통신 공동 설계 프레임워크를 제안한다. 예측 오류와 패킷 손실을 고려한 신뢰성 모델을 기반으로 시간·주파수 자원과 예측 지평을 최적화하여 지원 가능한 URLLC 서비스 수를 최대화한다. 시뮬레이션 및 가상 공장 실험을 통해 제안 방법의 효율성을 검증한다.
저자: Zhanwei Hou, Changyang She, Yonghui Li
본 논문은 5G 및 차세대 네트워크에서 핵심 과제로 떠오른 초고신뢰 저지연 통신(URRLC)의 지연‑신뢰성 트레이드오프를 해결하기 위해 ‘예측‑통신 공동 설계(Prediction and Communication Co‑design)’라는 새로운 프레임워크를 제시한다. 기존 연구들은 주로 무선 채널의 다양성 확보(예: K‑repetition, 주파수 홉핑, 다중 안테나, 멀티‑커넥티비티)나 스케줄링 최적화를 통해 신뢰성을 높이면서 지연을 줄이려 했지만, 백홀·코어 네트워크, 버퍼, 컴퓨팅 지연 등 시스템 전반에 걸친 지연 요소를 완전히 해소하지 못했다.
본 연구는 모바일 디바이스가 자체적으로 미래 상태를 예측하고, 예측된 데이터를 사전에 전송함으로써 사용자 체감 지연을 감소시키는 아이디어를 도입한다. 구체적으로, 디바이스 n은 현재 슬롯 k에서 예측 지평 Tₚₙ만큼 앞선 상태 ĤXₙ(k+Tₚₙ)를 기반으로 패킷을 생성하고, 전송 지연 D_cₙ(=D_qₙ+D_tₙ+D_dₙ+D_rₙ) 후에 수신 측에 도착한다. 따라서 실제 사용자 체감 지연은 D_eₙ = D_cₙ – Tₚₙ 로 표현된다. 만일 Tₚₙ이 D_cₙ보다 크면 D_eₙ이 음수가 되지만, 본 논문은 현실적인 경우 D_eₙ ≥ 0만을 고려한다.
시스템 모델에서는 각 디바이스가 F개의 특징(위치, 속도, 가속도, 힘·토크 등)을 갖는 상태 벡터 Xₙ(k)를 전송한다. 무선 전송은 일반적인 5G NR 환경을 가정하고, 전송 전력 P_tₙ, 대역폭 Bₙ, 잡음 스펙트럼 밀도 N₀ 등을 이용해 수신 SNR γₙ = aₙ·gₙ·P_tₙ/(ϑ·N₀·Bₙ) 로 정의한다. 블록길이는 η·D_τₙ·T_s·Bₙ 로 표현되며, 짧은 블록길이 전송에서의 디코딩 오류 확률 ε_τₙ은 finite‑blocklength 이론에 따라 Q‑함수 형태로 도출된다.
예측 오류는 실제 상태와 예측 상태 사이의 차이 Eₙ(k) = Xₙ(k) – ĤXₙ(k) 가 사전 정의된 임계값을 초과할 확률 ε_pₙ 으로 모델링한다. 이는 이동성 모델(예: 가우시안 마코프)이나 머신러닝 기반 예측기의 정확도에 따라 결정된다. 전체 신뢰성 ε_oₙ은 예측 오류, 패킷 손실(전송 오류 ε_tₙ), 디코딩 오류 ε_τₙ 등을 독립 사건으로 가정해 곱셈 형태로 결합한다.
논문은 위 모델을 바탕으로 ‘지원 가능한 URLLC 서비스 수’를 최대화하는 최적화 문제를 수립한다. 변수는 디바이스별 할당된 시간·주파수 비율 ηₙ, K‑repetition 복제 횟수 Kₙ, 예측 지평 Tₚₙ이며, 제약식은 (1) 사용자 체감 지연 D_eₙ ≤ D_max, (2) 전체 신뢰성 ε_oₙ ≤ ε_max, (3) 전체 자원 ηₙ·Kₙ·(1+κ) ≤ 1 (κ는 디코딩 지연 비율) 등이다. 이 문제는 비볼록 정수 최적화이며, 직접 해결이 어려워 논문은 두 단계 접근법을 제안한다. 첫 단계에서는 고정된 ηₙ에 대해 Tₚₙ와 Kₙ을 폐쇄형 식으로 구하고, 두 번째 단계에서는 ηₙ를 라그랑주 승수와 그린스톤 방법을 이용해 순차적으로 업데이트한다. 결과적으로 알고리즘의 복잡도는 O(N)이며, 최적해와의 차이는 이론적 상한 이하로 제한된다.
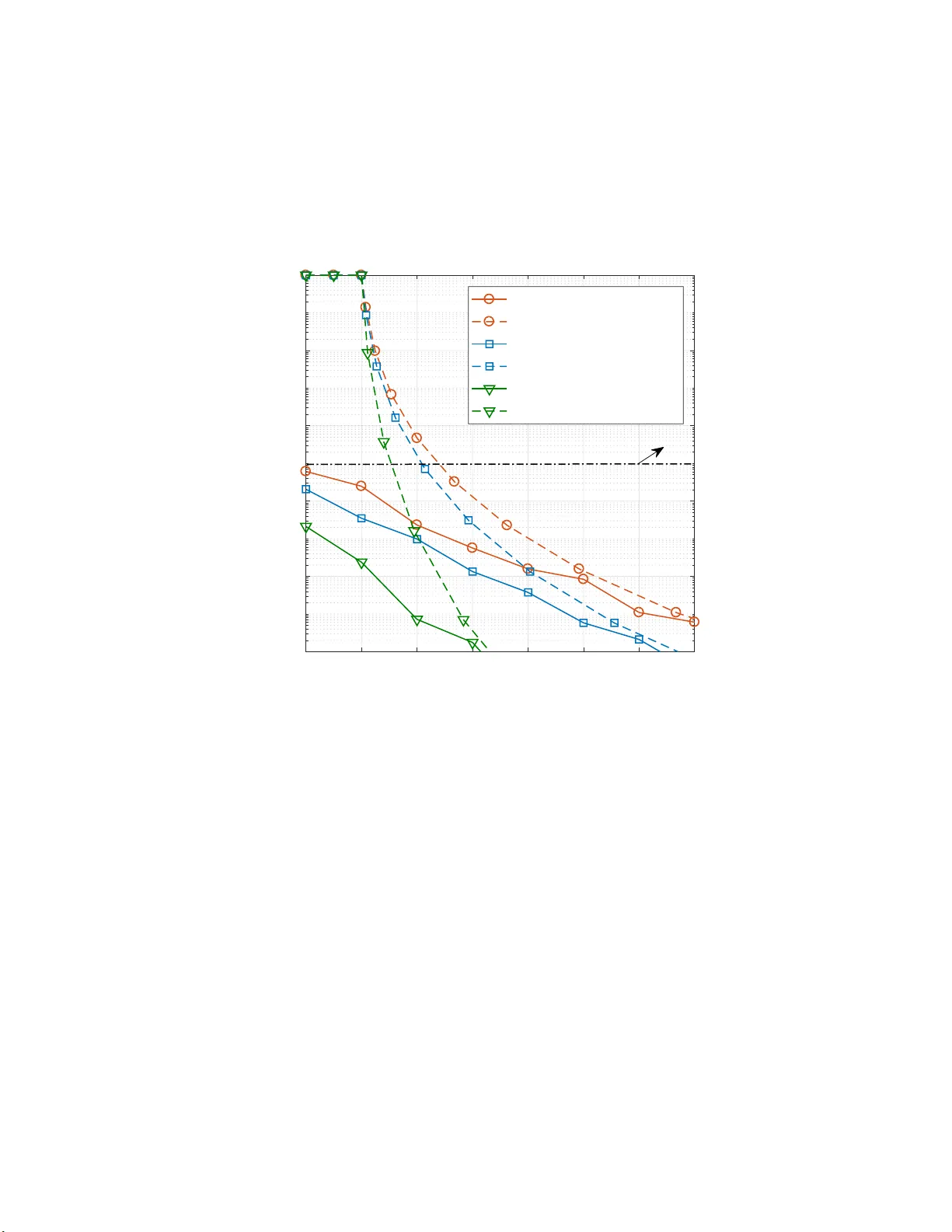
시뮬레이션에서는 5G NR 파라미터(예: T_s=0.125 ms, B=100 MHz)와 다양한 이동성 시나리오를 적용했다. 예측 지평을 5~9 ms로 설정했을 때, 사용자 체감 지연이 1 ms 이하로 감소하면서 전체 패킷 손실 확률이 10⁻⁶ 수준으로 유지되었다. 베이스라인(예측 미사용) 대비 동일 자원 조건에서 지연‑신뢰성 곡선이 크게 상향 이동했으며, 특히 짧은 지연 요구(D_max≤2 ms) 상황에서 지원 가능한 디바이스 수가 2배 이상 증가했다.
또한 가상 공장 환경에서 촉각 디바이스(힘·토크 피드백)를 이용한 원격 제어 실험을 수행했다. 실제 디바이스의 움직임 데이터를 기반으로 LSTM 기반 예측기를 학습시켰으며, 예측 오류 확률 ε_pₙ을 10⁻⁴ 수준으로 억제했다. 실험 결과, 제어 명령이 1 ms 이내에 도착했으며, 인간 사용자가 체감할 수 있는 최소 차이(JND)보다 작은 오차만 발생했다. 이는 예측‑통신 공동 설계가 실제 산업 자동화 시나리오에서도 실용적임을 입증한다.
결론적으로, 본 연구는 (1) 예측 지평을 활용해 통신 지연을 효과적으로 보상할 수 있음, (2) 예측 오류와 통신 오류를 동시에 고려한 신뢰성 모델링이 필수적임, (3) 시간·주파수 자원과 예측 파라미터를 공동 최적화함으로써 기존 다중복제·다양성 기반 방법보다 자원 효율성을 크게 향상시킬 수 있음을 보여준다. 향후 연구는 더 정교한 AI 기반 예측 모델, 엣지 컴퓨팅과의 협업, 다중 서비스(예: eMBB와 URLLC 동시) 환경에서의 확장성을 탐구하는 방향으로 진행될 수 있다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기