그래프 기반 하이브리드 궤적 안정성: 비동시 점프 시간 허용
본 논문은 하이브리드 시스템의 특정 궤적이 그래프적으로 안정함을 정의하고, 이를 기존의 비유클리드 거리 ρ_A와의 관계를 통해 Lyapunov 기법으로 검증할 수 있음을 보인다. 주요 결과는 ρ_A에 대한 안정성이 그래프 안정성을 함축한다는 정리이며, 진동‑충돌 시스템 예제로 실용성을 입증한다.
저자: J. J. B. Biemond, R. Postoyan, W. P. M. H. Heemels
본 논문은 하이브리드 시스템에서 시간‑변화하고 점프하는 해의 안정성을 기존의 상태‑거리 기반 정의가 아닌, 해의 그래프 자체가 서로 가깝게 유지되는 “그래프 안정성”이라는 새로운 관점으로 접근한다. 서론에서는 하이브리드 시스템이 연속 흐름과 이산 점프를 동시에 포함함을 강조하고, 특히 시간‑변화 해에 대한 안정성 분석이 ‘피킹 현상’—점프 시점이 미세하게 달라짐에 따라 순간적인 큰 상태 오차가 발생하는 현상— 때문에 어려움을 겪는다고 지적한다. 기존 연구는 (i) 점프 시점 차이를 무시하고 집합‑안정성을 적용하거나, (ii) 비유클리드 거리 \(\rho\) 를 도입해 점프 전·후 상태를 동일하게 취급하는 방법을 제시했지만, 일반화가 어렵고 직관적 해석이 제한적이었다.
이에 저자들은 그래프 안정성을 정의한다. 정의 1에 따르면, t‑완전 해 \(\phi^\star\) 가 그래프적으로 안정하려면, 임의의 ε>0에 대해 초기 오차가 충분히 작을 경우(δ(ε)), 모든 시간‑점프 쌍 \((t,j)\) 에 대해 다른 해 \(\phi\) 가 ε 이내의 연속시간 차이와 상태 차이를 동시에 만족하는 대응점을 찾을 수 있어야 한다. 또한, 비대칭적인 조건(iii)·(iv)를 통해 시간이 충분히 흐른 뒤에도 동일한 성질이 유지되는 점근적 그래프 안정성을 정의한다.
다음으로, 기존의 비유클리드 거리 \(\rho_A\) 를 재정의한다. 집합 \(A\)는 (동일 상태) 혹은 (점프 전·후 관계)인 쌍을 포함하고, \(\rho_A\)는 두 상태가 \(A\) 내에서 얼마나 가까운지를 측정한다. 정의 2는 \(\rho_A\)‑안정성을 그래프 안정성의 전제조건으로 제시한다.
핵심 이론은 두 정리이다. 정리 1은 시스템이 (i) \(G(D)\cap D=\emptyset\) 및 \(G(D)\subset C\) 와 같은 점프 구조를 갖고, (ii) \(F(x)\)가 \(C\cap D\) 에서 흐름을 강제하며, (iii) 역방향 흐름이 \(C\cap G(D)\) 에서 방해되지 않으며, (iv) 점프 집합이 유계이거나 해가 유계인 경우, \(\rho_A\)‑조건을 만족하는 해는 그래프적으로 ε‑근접성을 보장한다는 내용이다. 정리 2는 정리 1의 가정 하에, \(\rho_A\)‑안정성이 그래프 안정성(및 점근적 그래프 안정성)을 직접적으로 함축한다는 결론을 내린다. 즉, 기존 Lyapunov‑함수와 \(\rho_A\)‑거리 기반 분석을 그대로 적용하면 그래프 안정성을 검증할 수 있다.
증명에서는 Lemma 3·4를 통해 점프 집합 근처에서의 흐름 시간 상한을 확보하고, 연속 흐름이 충분히 짧은 구간 내에 점프가 발생함을 보인다. 이를 이용해 그래프 거리와 \(\rho_A\) 사이의 상한 관계를 구축하고, 점프 전·후 대응점을 선택함으로써 정의 1의 (i)·(ii) 조건을 만족한다. 또한, 점프 집합이 유계가 아니더라도 적절한 컴팩트한 부분집합 \(\bar D\) 을 도입해 동일한 논리를 적용한다.
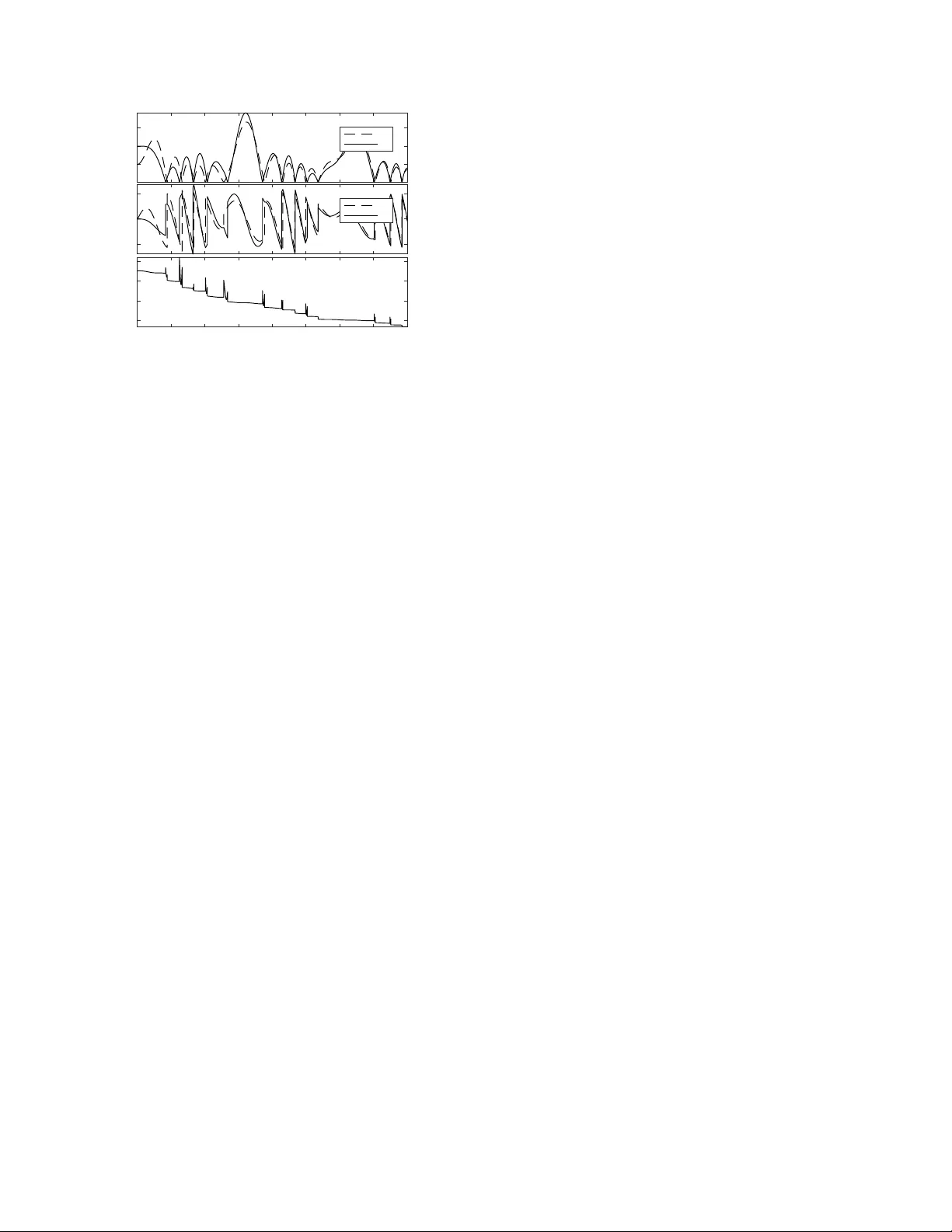
실험 섹션에서는 1차 질량‑스프링‑감쇠 시스템에 충돌 조건을 추가한 하이브리드 모델을 제시한다. 상태 \(x=(z_1,z_2)\) 는 위치와 속도를 나타내며, 점프 집합 \(D\)는 위치가 0이고 속도가 일정 이하일 때 정의된다. 피드백 \(u_{fb}\)와 외부 입력 \(u_{ff}\)를 설계해 \(\rho_A\)‑안정성을 Lyapunov 함수로 증명하고, 정리 2에 의해 그래프 안정성도 확보한다. 시뮬레이션 결과(그림 1)는 (a)·(b)에서 두 해의 그래프가 점차 겹치는 모습을, (c)에서는 \(\rho_A\) 값이 시간에 따라 감소하는 모습을 보여준다.
결론에서는 그래프 안정성 개념이 ‘피킹 현상’ 없이 직관적인 궤적 추적 안정성을 제공함을 강조한다. 또한, 기존 Lyapunov 기반 비유클리드 거리 기법을 그대로 활용할 수 있어 분석 부담이 크게 늘어나지 않으며, 충돌 로봇, 전력 전자 스위칭, 바이오메카니컬 임플란트 등 다양한 분야에 적용 가능함을 제시한다. 향후 연구 과제로는 Zeno 현상, 다중 점프 동시 발생, 비선형 비볼륨 점프 집합 등 보다 복잡한 하이브리드 구조에 대한 확장이 제안된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기