On the graphical stability of hybrid solutions with non-matching jump times: Extended Paper
We investigate stability of a solution of a hybrid system in the sense that the graphs of solutions from nearby initial conditions remain close and tend towards the graph of the given solution. In this manner, a small continuous-time mismatch is allo…
Authors: J. J. B. Biemond, R. Postoyan, W. P. M. H. Heemels
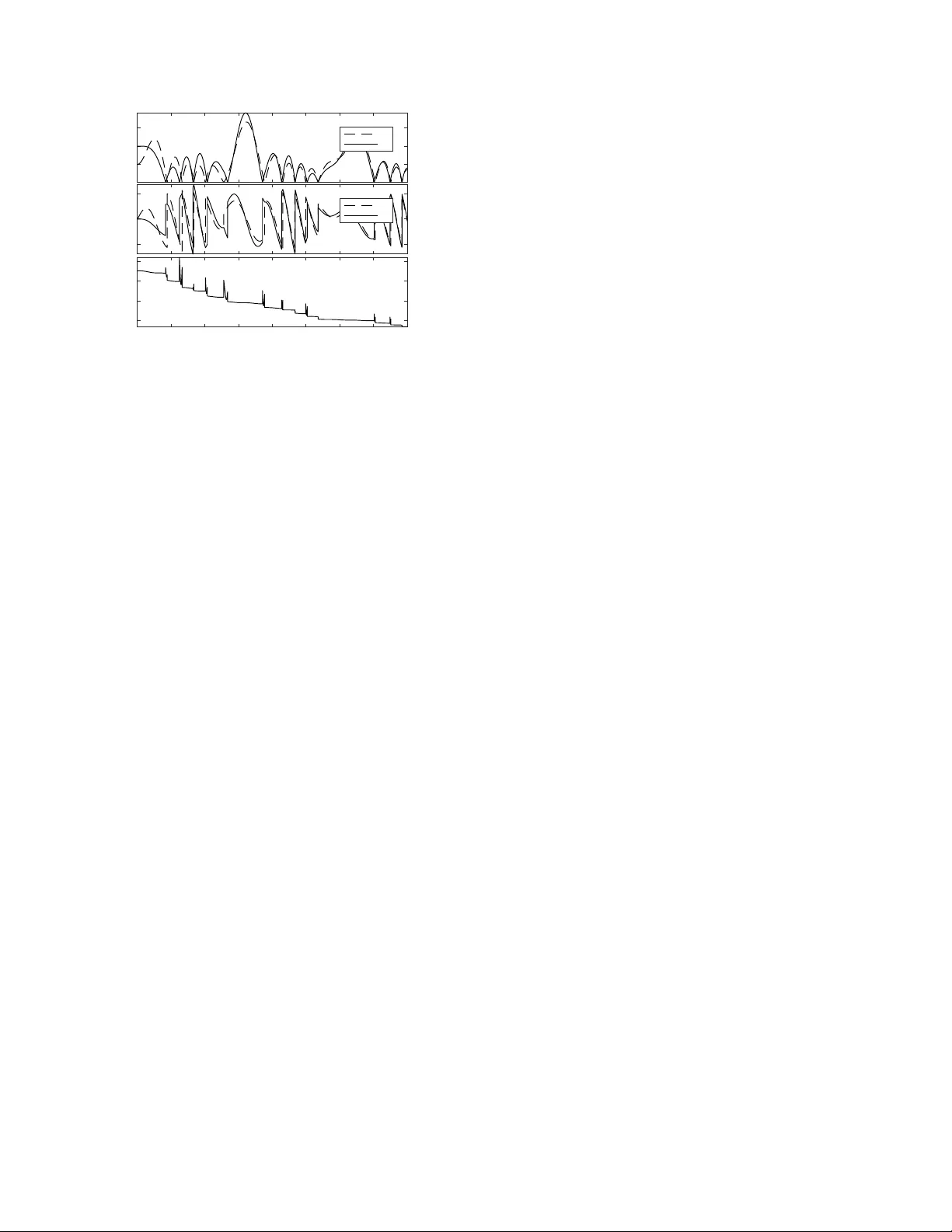
On the graphical stabilit y of h ybrid solutions with non-matc hing jump times: Extended P ap er J. J. Benjamin Biemond a , Romain P ostoy an b , W. P . Maurice H. Heemels c , Nathan v an de W ou w c , d a Dep artment of Optome chatr onics, Netherlands Or ganization for Applie d Scientific R ese ar ch, TNO, Delft, the Netherlands. b Universit´ e de L orr aine, CNRS, CRAN, F-54000 Nancy, F r anc e c Dep artment of Me chanic al Engine ering, Eindhoven University of T e chnolo gy, the Netherlands d Dep artment of Civil, Envir onmental & Ge o- Engine ering, University of Minnesota, Pil lsbury Drive SE, U.S.A. Abstract W e in vestigate stabilit y of a solution of a hybrid system in the sense that the graphs of solutions from nearb y initial conditions remain close and tend to wards the graph of the given solution. In this manner, a small contin uous-time mismatch is allow ed b et ween the jump times of neighbouring solutions and the ‘p eaking phenomenon’ is a voided. W e provide conditions suc h that this stabilit y notion is implied by stability with resp ect to a sp ecifically designed distance-like function. Hence, stability of solutions in the graphical sense can be analysed with existing Lyapuno v techniques. 1 In tro duction Hybrid systems feature b oth con tinuous ev olution in time and discrete even ts, and are v aluable for the mo d- elling, analysis and control of man y engineering appli- cations, see [1, 2] and the references therein. While the stabilit y of stationary p oints and sets for hybrid systems is relativ ely w ell understoo d, far less is kno wn about the stabilit y of a giv en time-v arying and jumping solution. The stabilit y of time-v arying solutions to h ybrid sys- tems is c hallenging [2, 3] as t wo nearb y solutions t ypically sho w ‘p eaking b ehaviour’, i.e. they exp erience jumps at close, but not identical, jump times and during this time- mismatc h interv al, the state distance b etw een b oth so- lutions will generally not b e small. T o analyse stability of a h ybrid solution, set-stabilit y techniques [4], ignoring the state difference in this interv al [3], or non-Euclidean distance-lik e fu nctions [5, 6] ha ve b een proposed. The ap- proac hes in [3, 4] seem to b e hard to generalize, while sta- bilit y with resp ect to non-Euclidean distance-like func- tions is hard to interpret. Here, w e inv estigate the sta- bilit y of a single solution (in contrast to incremen tal sta- bilit y [7, 8]) using closeness of the graphs of solutions. W e define stability of a given solution in gr aphic al sense , ? Corresp onding author J. J. B. Biemond. Email addr ess: benjamin.biemond@tno.nl (J. J. Benjamin Biemond). whic h implies that the Euclidean distance b etw een the states of this solution and nearby solutions, when com- pared at close contin uous-time instances, tends tow ards zero and, in addition, the difference betw een the con tin- uous times used in this comparison also tends to zero when time ev olves (a similar definition is used in [9]). W e prov e that graphical stability is implied by stabilit y with resp ect to a well-designed non-Euclidean distance- lik e function, cf. [5, 6]. This implication allo ws to pro v e (asymptotic) stabilit y in graphical sense using existing Ly apuno v-based techniques. F or the first time, a graphi- cal and in tuitive notion of stabilit y is pro vided for a giv en solution that applies to a large class of hybrid systems and can b e analysed with existing techniques. 2 Hybrid system and stabilit y definitions Let ( x, y ) = [ x T , y T ] T for ( x, y ) ∈ R n × R m and for a set-v alued mapping F , dom F := { x ∈ R n : F ( x ) 6 = ∅} . Giv en S 1 , S 2 ⊂ R n , S 1 + S 2 denotes { y 1 + y 2 : y 1 ∈ S 1 , y 2 ∈ S 2 } and B s denotes { x ∈ R n : k x k ≤ s } , with k · k the Euclidean norm. Let ρ B 1 ( x, y ) := inf ( u,v ) ∈ B 1 k ( x − u, y − v ) k for B 1 ⊂ R n × R n . W e study hybrid systems ˙ x ∈ F ( x ) , x ∈ C ; x + ∈ G ( x ) , ∈ D , (1) as in [1] where we imp ose the hybrid b asic c onditions (cf. [1]) given by: Preprin t submitted to Automatica Septem b er 23, 2024 (A1) flo w set C and jump set D are closed subsets of R n (A2) flo w map F : R n ⇒ R n is outer semicon tinuous and locally b ounded relative to C , C ⊂ dom F , and F ( x ) is conv ex for each x ∈ C (A3) jump map G : R n ⇒ R n is outer semicon tinuous and lo cally b ounded relative to D , and D ⊂ dom G . Let h ybrid time domain, maximal solutions to (1) and tangen t cone at a point x ∈ R n to a set B ⊆ R n (de- noted T B ( x )) be defined as in [1]. W e call solution φ t -complete if sup ( t,j ) ∈ dom φ t = ∞ and b ounded when k φ ( t, j ) k ≤ R for all ( t, j ) ∈ dom φ and some R > 0. Exploiting the Hausdorff distance b et ween solution graphs (see [9, 10]), we define graphical stabilit y of a solution as follows: Definition 1 A t -c omplete solution φ ? to system (1) is stable in graphical sense if the fol lowing c ondition holds. F or any ε > 0 , ther e exists δ ( ) > 0 such that for any maximal solution φ with k φ ? (0 , 0) − φ (0 , 0) k < δ ( ) it holds that (i) for al l ( t, j ) ∈ dom φ ? , ther e exists ( t 0 , j 0 ) ∈ dom φ with | t − t 0 | < ε such that k φ ? ( t, j ) − φ ( t 0 , j 0 ) k < ε , (ii) for al l ( t 0 , j 0 ) ∈ dom φ , ther e exists ( t, j ) ∈ dom φ ? with | t − t 0 | < ε such that k φ ? ( t, j ) − φ ( t 0 , j 0 ) k < ε . The solution φ ? is asymptotically stable in graphical sense if, in addition, ther e exists r > 0 such that for any ε > 0 and any maximal solution φ with k φ ? (0 , 0) − φ (0 , 0) k < r ther e exists T ≥ 0 for which the fol lowing statements hold: (iii) for al l ( t, j ) ∈ dom φ ? with t ≥ T , ther e exists ( t 0 , j 0 ) ∈ dom φ with | t − t 0 | < ε such that k φ ? ( t, j ) − φ ( t 0 , j 0 ) k < ε , (iv) for al l ( t 0 , j 0 ) ∈ dom φ with t 0 ≥ T , ther e exists ( t, j 0 ) ∈ dom φ ? with | t − t 0 | < ε such that k φ ? ( t, j ) − φ ( t 0 , j 0 ) k < ε . 2 Definition 1 prioritises con tinuous time o ver the jump coun ter (in [8] and references therein, this is used for in- cremen tal stability). F o cussing on hybrid systems that cannot exhibit consecutiv e jumps without flow, [5, Defi- nition 1] yields the distance-like function ρ A ( x 1 , x 2 ) with A := ( x 1 , x 2 ) ∈ ( C ∪ D ∪ G ( D )) 2 : x 1 = x 2 or x 2 ∈ D ∧ x 1 ∈ G ( x 2 ) or x 1 ∈ D ∧ x 2 ∈ G ( x 1 ) and by [8, Lemma 1] the stability definition in [6] is equiv alent to: Definition 2 A t -c omplete solution φ ? to system (1) is stable with resp ect to ρ A if the fol lowing c onditions hold. F or any ε w > 0 , ther e exists δ w ( ε w ) > 0 such that for any maximal solution φ with ρ A ( φ ? (0 , 0) , φ (0 , 0)) < δ w ( ε w ) it holds that (i) for al l ( t, j ) ∈ dom φ ? , ther e exists ( t, j 0 ) ∈ dom φ such that ρ A ( φ ? ( t, j ) , φ ( t, j 0 )) < ε w , and (ii) for al l ( t, j 0 ) ∈ dom φ , ther e exists ( t, j ) ∈ dom φ ? such that ρ A ( φ ? ( t, j ) , φ ( t, j 0 )) < ε w . The solution φ ? is asymptotically stable with re- sp ect to ρ A if, in addition, ther e exists r w > 0 such that for any ε w > 0 and any maximal solutions φ with ρ A ( φ ? (0 , 0) , φ (0 , 0)) < r w ther e exists T w ≥ 0 for which it holds that (iii) for al l ( t, j ) ∈ dom φ ? with t ≥ T w , ther e exists ( t, j 0 ) ∈ dom φ such that ρ A ( φ ? ( t, j ) , φ ( t, j 0 )) < ε w , and (iv) for al l ( t, j 0 ) ∈ dom φ with t 0 ≥ T w , ther e exists ( t, j 0 ) ∈ dom φ ? such that ρ A ( φ ? ( t, j ) , φ ( t, j 0 )) < ε w . 2 3 Comparison of stability concepts The follo wing result allo ws to compare b oth definitions. Theorem 1 Consider system (1) with a t -c omplete so- lution φ ? and let the fol lowing c onditions hold: (i) G ( D ) ∩ D = ∅ , G ( D ) ⊂ C and G is single-value d and pr op er; (ii) ∀ x ∈ C ∩ D , F ( x ) ∩ T C ( x ) = ∅ ; (iii) ∀ x ∈ C ∩ G ( D ) , − F ( x ) ∩ T C ( x ) = ∅ ; (iv) either D is b ounde d or φ ? is b ounde d. Then, for al l ε > 0 ther e exists s > 0 such that for any t -c omplete solution φ to (1) that satisfies the c onditions: (v) k φ ? (0 , 0) − φ (0 , 0) k < s ; (vi) for al l ( t, j ) ∈ dom φ ? , ther e exists ( t, ˜ ) ∈ dom φ such that ρ A ( φ ? ( t, j ) , φ ( t, ˜ )) < s , it holds that for any ( t, j ) ∈ dom φ ? , ther e exists ( t 0 , j 0 ) ∈ dom φ with | t − t 0 | < ε such that k φ ? ( t, j ) − φ ( t 0 , j 0 ) k < ε . 2 The existence of a solution φ v erifying (v) and (vi) is guaran teed by [1, Proposition 6.14] and that the con- clusion of Theorem 1 coincides with (i) of Definition 1. Condition (i) in this theorem restricts the p ossibilit y of forw ard and backw ard jumps of the h ybrid system (e.g., excluding Zeno-t yp e solutions). With the definition of the set A , this condition is essential to draw conclusions on the difference b etw een solutions φ and φ ? when con- dition (vi) holds. Condition (ii), combined with the fact that F ( x ) is nonempt y for x ∈ C , guarantees that so- lutions that are close to the jump set, will indeed jump in the near future (with a uniform b ound on the jump time mismatc h). In particular, it ensures C ∩ D has zero Leb esgue measure and in case D is a submanifold with C lo cated on one side of this manifold, (ii) enforces transv ersal intersection of solutions with D . Condition (iii) has a similar role for solutions bac kw ard in time and also guarantees that solutions cannot enter G ( D ) by flo w. T o infer compactness results for a b ounded subset of the jump set D including those p oin ts of D explored b y the solution φ ? , condition (iv) is imp osed. W e no w form ulate our main result b elow. Theorem 2 Consider a t -c omplete solution φ ? to sys- tem (1) , supp ose that c onditions (i)-(iv) of The or em 1 hold. If the solution φ ? is (asymptotic al ly) stable with r e- sp e ct to ρ A (as in Definition 2), then it is (asymptoti- c al ly) stable in gr aphic al sense as in Definition 1. 2 2 0 50 100 150 φ 1 φ ⋆ φ -100 0 100 φ 2 φ ⋆ φ 0 5 10 15 20 25 30 35 40 t 10 20 30 40 ρ A ( φ , φ ⋆ ) a) b) c) Figure 1. a) and b) Reference solution φ ? and a nearb y so- lution φ . c) Distance function ρ A . 4 Example Consider a single degree-of-freedom mechanical system with unit mass, damp er with damping constant 0 . 02 and spring with unit stiffness constant and unloaded p osition x 1 = 1. The dynamics near a reference solution φ ? is giv en as ˙ x = 0 1 − 1 − 0 . 02 x + 0 k ¯ x 1 + ( 0 1 ) ( u ff ( t ) + u fb ( t, x )) , x ∈ C = { ( z 1 , z 2 ) ∈ R 2 : z 1 ≥ 0 } , x + = − εx, x ∈ D = { ( z 1 , z 2 ) ∈ R 2 : z 1 = 0 , z 2 ≤ − r } . Let the forcing u ff ( t ) and feedback u fb ( t, x ) be selected as in [5, Section 6], where we note that this solution φ ? is b ounded and t -complete, and using a Lyapuno v function argumen t, in [5] the applied feedbac k is prov en to render the solution φ ? asymptotically stable with resp ect to ρ A . Item (i) of Theorem 1 holds as G ( D ) = { ( z 1 , z 2 ) ∈ R 2 : z 1 = 0 , z 2 ≥ εr } , and (ii) and (iii) are v erified since T C ( x ) = { z ∈ R 2 : 0 1 z ≥ 0 } for x ∈ D ∪ G ( D ) and 0 1 F ( x ) = x 2 . Consequently , Theorem 2 is applicable and ensures that φ ? is (asymptotically) stable in graphical sense. In Fig. 1, solutions of this hybrid system are shown. The function ρ A is sho wn in panel c) and illustrates that the solution φ ? is asymptotically stable with resp ect to ρ A . Indeed, as stated in Theorem 2, φ ? is asymptotically stable in graphical sense, see panels a)-b). Analysis of stability in graphical sense is facilitated by Theorem 2, which states that this stabilit y notion is im- plied by stability of the solution with respect to a sp ecif- ically constructed distance-lik e function. Hence, exist- ing Lyapuno v-based approaches as in [6] can b e used to pro v e asymptotic stability in graphical sense. The exam- ple illustrates how Theorem 2 is used to prov e stability in graphical sense for a b ouncing ball tracking problem. An op en question is if the stability definitions in graph- ical sense, or in terms of ρ A , are equiv alent. References [1] R. Go eb el, R. G. Sanfelice, and A. R. T eel, Hybrid dynamic al systems: Mo deling, Stability and Robustness . Princeton Universit y Press, Princeton, 2012. [2] R. I. Leine and N. v an de W ouw, Stability and c onver genc e of mechanic al systems with unilater al c onstraints . Springer- V erlag, Berlin, 2008. [3] I. C. Mor˘ arescu and B. Brogliato, “T ra jectory trac king control of m ulticonstraint complemen tarity Lagrangian systems,” IEEE T r ansactions on Automatic Contr ol , vol. 55, no. 6, pp. 1300–1313, 2010. [4] F. F orni, A. R. T eel, and L. Zaccarian, “F ollow the b ouncing ball: Global results on tracking and state estimation with impacts,” IEEE T r ans. A utom. Contr ol , vol. 58, pp. 1470– 1485, 2013. [5] J. J. B. Biemond, W. P . M. H. Heemels, R. G. Sanfelice, and N. van de W ouw, “Distance function design and Lyapuno v techniques for the stability of h ybrid tra jectories,” Automatic a , vol. 73, pp. 38–46, 2016. [6] J. J. B. Bie mond, N. v an de W ouw, W. P . M. H. Heemels, and H. Nijmeijer, “T racking control for hybrid systems with state-triggered jumps,” IEEE T rans. Autom. Contr ol , v ol. 58, pp. 876–890, 2013. [7] Y. Li, S. Phillips, and R. G. Sanfelice, “Basic properties and characterizations of incremental stability prioritizing flow time for a class of hybrid systems,” Systems & Contr ol L etters , vol. 90, pp. 7–15, 2016. [8] J. J. B. Biemond, R. Posto yan, W. P . M. H. Heemels, and N. v an de W ouw, “Incremental stability of hybrid systems,” IEEE T r ans. Autom. Contr ol , v ol. 63, pp. 4094–4109, 2018. [9] R. G. Sanfelice, A. R. T eel, and R. Sepulc hre, “A h ybrid systems approach to tra jectory tracking control for juggling systems,” in Pr o c ee dings of the 46th IEEE Confer enc e on De cision and Contr ol, New-Orleans , 2007, pp. 5282–5287. [10] R. Go eb el and A. R. T eel, “Solutions to h ybrid inclusions via set and graphical con vergence with stability theory applications,” Automatic a , vol. 42, no. 4, pp. 573–587, 2006. A Pro ofs of Theorems 1 and 2 Lemma 3 Consider system (1) , supp ose (ii) of The o- r em 1 holds and let ¯ K > 0 b e given. If D is b ounde d then for al l 2 > 0 , ther e exists 1 > 0 such that for any t - c omplete solution φ to (1) and any ( t, j ) ∈ dom φ such that φ ( t, j ) ∈ ( C ∩ D ) + B 1 , ther e exists t 0 ∈ [ t, t + 2 ] such that ( t 0 , j ) ∈ dom φ and φ ( t 0 , j ) ∈ C ∩ D . F or un- b ounde d D , such 1 and t 0 exist if φ ( t, j ) ∈ B ¯ K . 2 PR OOF. Let b D b e giv en b y D if it is b ounded and b y D ∩ B 2 ¯ K otherwise. Since D is closed b y (A1), b D is compact. Since F is lo cally bounded b y (A2) of the h ybrid basic assumptions, w e can select γ > 0 , ˜ F > 1 suc h that k f k < ˜ F for all f ∈ F ( x ) and x ∈ ( C ∩ b D ) + B γ . Giv en 2 > 0, we show that 1 > 0 can b e selected suc h that for any solution φ and any h ybrid time ( t, j ) ∈ 3 dom φ such that φ ( t, j ) ∈ ( C ∩ D ) + B 1 , we hav e k φ ( s, j ) − φ ( t, j ) k ≤ | s − t | ˜ F ≤ 2 , for all ( s, j ) ∈ dom φ with s ∈ [ t, t + min( γ 1+ ˜ F , 2 ˜ F )) . (A.1) Namely , imp ose 0 < 1 < min( ¯ K , γ 1+ ˜ F ) and consider a t -complete solution φ (with k φ ( t, j ) k ≤ ¯ K if D is un b ounded due to the hypothesis of the lemma) and ( t, j ) ∈ dom φ with φ ( t, j ) ∈ ( C ∩ D ) + B 1 . Exploit- ing 1 < ¯ K and k y k > 2 ¯ K for all y ∈ D \ b D in case D is unbounded, we find φ ( t, j ) ∈ ( C ∩ b D ) + B 1 . In- tro ducing δt := min( γ 1+ ˜ F , 2 ˜ F ), w e let ¯ s ∈ [ t, t + δ t ] b e the maximum scalar such that for all s ∈ [ t, ¯ s ], ( s, j ) ∈ dom φ and φ ( s, j ) ∈ { φ ( t, j ) } + B γ − 1 hold.W e deduce φ ( s, j ) ∈ ( C ∩ b D ) + B γ for s ∈ [ t, ¯ s ] and, hence, k f k < ˜ F for all f ∈ F ( φ ( s, j )) and s ∈ [ t, ¯ s ]. By definition of the solution, dφ ( s,j ) ds ∈ F ( φ ( s, j )) for almost all s ∈ [ t, ¯ s ], suc h that k φ ( s, j ) − φ ( t, j ) k ≤ | s − t | ˜ F , for s ∈ [ t, ¯ s ] holds. This directly implies that for s ∈ [ t, ¯ s ], k φ ( s, j ) − φ ( t, j ) k ≤ δ t ˜ F ≤ γ 1+ ˜ F ˜ F = γ − γ 1+ ˜ F < γ − 1 . Hence, we find ¯ s = min { t + δt, max( s ∈ R : ( s, j ) ∈ dom φ ) } and [ t, ¯ s ] coincides with { s ∈ [ t, t + δ t ] : ( s, j ) ∈ dom φ } . With s as ab ov e and | s − t | ≤ δ t ≤ 2 ˜ F , (A.1) is prov en. F or the sake of contradiction, we now supp ose: S1: there exists 2 > 0 such that for all 1 ∈ (0 , γ ), there exists a t -complete solution φ to system (1), with φ (0 , 0) ∈ ( C ∩ b D ) + B 1 , and φ ( t 0 , 0) / ∈ C ∩ D for all t 0 ∈ [0 , min( γ 1+ ˜ F , 2 ˜ F )]. Let 2 > 0 be as in S1. W e select 1 ∈ (0 , γ ) such that (A.1) holds for any solution φ and h ybrid time instant ( t, j ) ∈ dom φ for which φ ( t, j ) ∈ C ∩ b D + B 1 and in tro duce δ t 0 := min( γ 1+ ˜ F , 2 ˜ F , γ − 1 ˜ F ). Select 0 1 = 1 , a sequence { i 1 } i ∈{ 0 , 1 ,... } of strictly positive scalars suc h that i 1 < i − 1 1 for all i ∈ { 1 , 2 , . . . } , lim i →∞ i 1 = 0, and a sequence { φ i } i ∈{ 1 , 2 ,... } of solutions to (1) with φ i : [0 , δ t 0 ] × { 0 } → R n , i ∈ { 1 , 2 , . . . } , φ i (0 , 0) / ∈ C ∩ D ; φ i (0 , 0) ∈ ( C ∩ b D ) + B i 1 and φ i ( t 0 , 0) ∈ ( { φ i (0 , 0) } + B 2 ) \ ( C ∩ D ) for all t 0 ∈ [0 , δ t 0 ] (cf. S1). Introducing the compact set K = ( C ∪ b D ) ∩ ( C ∩ b D + B γ ) we find with (A.1) and δ t 0 ≤ γ − 0 1 ˜ F that for each solution φ i , i ∈ N , it holds that φ i ( t 0 , 0) ∈ K for t 0 ∈ [0 , δ t 0 ], where we ex- ploited the b ound k dφ ( t,j ) dt k ≤ ¯ F that holds in this time in terv al. Hence, the elements of the sequence { φ i } i ∈ N are con tained in the bounded set of absolutely con tinuous functions [0 , δ t 0 ] × { 0 } → K . Consequently , there exists a conv ergent subsequence within { φ i } i ∈ N that graphi- cally conv erges to a function φ : [0 , δ t 0 ] × { 0 } → K with φ (0 , 0) ∈ C ∩ b D according to Theorem 5.7 in [1]. This function φ is a solution to the hybrid system b y sequen- tial compactness of solutions to hybrid systems satisfy- ing A1)-A3), cf. [1, Theorem 6.8 and Definition 6.2(a)]. Ho w ever, the existence of suc h a solution is excluded by item (ii) of Theorem 1 as no solutions to (1) can flo w on C ∩ D . Hence, S1 is contradicted and w e ha ve prov en the lemma for ( t, j ) = (0 , 0). Time-in v ariance of (1) con- cludes this pro of. 2 Lemma 4 Consider a hybrid system (1) satisfying items (i), (iii) of The or em 1 and let ¯ K ∈ R b e given. If D is b ounde d then for al l 4 > 0 , ther e exists 3 > 0 such that for any solution φ to (1) and any ( t, j ) ∈ dom φ such that φ ( t, j ) ∈ ( C ∩ G ( D )) + B 3 , j ∈ { 1 , 2 , . . . } , ther e exists t 0 ∈ [ t − 4 , t ] such that ( t 0 , j ) ∈ dom φ and φ ( t 0 , j ) ∈ C ∩ G ( D ) . F or unb ounde d D , such 3 and t 0 exist if φ ( t, j ) ∈ B ¯ K . 2 PR OOF. If j > 0, w e observ e that the flowing solution segmen t of φ to (1) is characterised by the differen tial inclusion x 0 ∈ − F ( x ) , x ∈ C as long as x 6∈ G ( D ) and the direction of con tin uous time is rev ersed. Hence, we deduce that the statement of Lemma 4 is prov en by ap- plication of Lemma 3 after replacing D with G ( D ). 2 PR OOF of THEOREM 1. If the jump set D is un- b ounded (cf. (iv)) we construct ¯ K > 0 that verifies Lem- mas 3 and 4 and is such that ρ A ( φ ? ( t, j ) , φ ( t, ˜ )) in (vi) can b e written as the distance from a compact set when b oth (iv) and (vi) hold for some s < K . F or this purp ose, w e select ¯ K > 0 such that b oth G − 1 ( G ( D ) ∩B 2 K )+ B K ⊂ D ∩ B ¯ K and ( G ( D ∩ B 2 K ) + B K ) ⊆ B ¯ K hold. W e define b D = D ∩ B ¯ K if D is unbounded and b D = D otherwise. The set b D is closed by (A1), it is thus compact. In ad- dition, b G D := G ( b D ) is compact by lo cally b oundedness and outer semi-contin uity of G . W e introduce A 01 = { ( z 1 , z 2 ) ∈ ( C ∪ D ) 2 : z 2 = G ( z 1 ) , z 1 ∈ b D } suc h that the set A 01 is compact as G is lo cally b ounded and outer semi-con tinuous. Introducing the symmetrical set A 10 = { ( z 1 , z 2 ) ∈ ( C ∪ D ) 2 : z 1 = G ( z 2 ) , z 2 ∈ b D } , compactness of this set follows from the symmetry . F rom item (i) of Theorem 1, w e conclude A 01 and A 10 are not intersecting. F urthermore, the in- tersection of A 01 and A 00 := { ( z 1 , z 2 ) ∈ ( C ∪ D ) 2 : z 2 = z 1 } is empt y , as, for p oin ts ( z 1 , z 2 ) in this intersec- tion, z 1 = z 2 = G ( z 1 ) should hold, con tradicting item (i); similarly , w e find A 10 ∩ A 00 = ∅ . Since A 00 , A 01 , A 10 are disconnected, closed and the latter t wo sets com- pact, there exists ¯ s > 0 suc h that { ( x, y ) ∈ ( C ∪ D ) 2 : ρ A 00 ( x, y ) ≤ ¯ s } , { ( x, y ) ∈ ( C ∪ D ) 2 : ρ A 01 ( x, y ) ≤ ¯ s } and { ( x, y ) ∈ ( C ∪ D ) 2 : ρ A 10 ( x, y ) ≤ ¯ s } are m utually disconnected. As b D and b G D are compact and F is lo- cally b ounded by (A2), there exist p ositive scalars r, ˜ F suc h that ˜ F > 1 and k f k ≤ ˜ F for all f ∈ F ( x ) and x ∈ ( b D ∪ b G D ) + B r . No w, fix ε > 0 as in Theorem 1 and tak e 1 as in Lemma 3 with 2 = min( ε, 2 r ) 2(1+ ˜ F ) and 3 as in Lemma 4 with 4 = min( ε, 2 r ) 2(1+ ˜ F ) , where, if D is un b ounded, 4 ¯ K is used. Selecting s > 0 such that s < min ¯ s, ε 2 √ 2 ˜ F , r ˜ F +1 , K , 1 2 min u ∈ b D,w ∈ b G D k u − w k , 1 , 3 (with K = ∞ if D is b ounded), w e pro ve that condition (i) in Definition 1 holds. Considering an y pair ( φ ? , φ ) of t -complete so- lutions to (1) satisfying (v),(vi) and selecting ( t, j ) ∈ dom φ ? arbitrary , we find by (vi) that there exists ( t, ˜ ) ∈ dom φ suc h that ρ A ( φ ? ( t, j ) , φ ( t, ˜ )) < s . Exploiting strictness of this inequality and the infimum defining ρ A , this implies that there exists ( z 1 , z 2 ) ∈ A such that k ( φ ? ( t, j ) − z 1 , φ ( t, ˜ ) − z 2 ) k < s (A.2) holds, with z 1 , z 2 satisfying one of the following three cases that are generated b y the ‘or’ conditions in the definition of A . W e now construct ( t 0 , j 0 ) ∈ dom φ as in the theorem. Case 1: z 1 = z 2 ∈ C ∪ D . W e directly ob- serv e ( z 1 , z 2 ) ∈ A 00 and select ( t 0 , j 0 ) = ( t, ˜ ). F rom k ( φ ? ( t, j ) − z 1 , φ ( t, ˜ ) − z 2 ) k ≥ min z ∈ R n k ( φ ? ( t, j ) − z , φ ( t, ˜ ) − z ) k = 1 √ 2 k φ ? ( t, j ) − φ ( t, ˜ ) k and (A.2), w e conclude k φ ? ( t, j ) − φ ( t, j 0 ) k < √ 2 s ≤ ε since s < ε 2 √ 2 ˜ F < ε √ 2 . Hence, ( t 0 , j 0 ) satisfies the condi- tions imp osed in the theorem. Case 2: z 1 ∈ D , z 2 = G ( z 1 ) . Since φ ( t, ˜ ) is close to G ( D ), we will apply Lemma 4 to prov e that φ exp eri- enced a jump shortly b efore the time instant ( t, ˜ ) and select time ( t 0 , j 0 ) b efore this jump and show item (i) of Definition 1 holds. First, observ e that z 1 ∈ b D holds also in the case where D is unbounded follo wing (A.2) and (iv). Hence, ( z 1 , z 2 ) ∈ A 01 holds. T o pro ve ˜ > 0 in (A.2), supp ose the con trary , i.e. ˜ = 0. Let t ? ≤ t denote the minim um contin uous time such that inf z ∈ b D k ( φ ? ( τ , j ) − z , φ ( τ , 0) − G ( z )) k < s for τ ∈ ( t ? , t ] and [ t ? , j ] ∈ dom φ ? . Contin uity of hybrid arcs during flo w either implies ( t ? , j − 1) ∈ dom φ ? or there exists z ? 1 ∈ b D such that k ( φ ? ( t ? , j ) − z 1 , φ ( t ? , 0) − G ( z ? 1 )) k = s. The first option implies φ ( t ? , j ) ∈ G ( b D ) such that k φ ? ( t ? , j ) − z k ≥ min u ∈ b D,w ∈ G ( b D ) k u − w k > s , con- tradicting inf z ∈ b D k ( φ ? ( τ , j ) − z , φ ( τ , 0) − G ( z )) k < s . Otherwise, by design of ¯ s , we find inf z ∈ C ∪ D k ( φ ? ( t ? , j ) − z , φ ( t ? , 0) − z ) k > ¯ s > s (A.3) and inf z ∈ D k ( φ ? ( t ? , j ) − G ( z ) , φ ( t ? , 0) − z ) k > ¯ s > s . Again exploiting contin uity of hybrid arcs during flow, there cannot exist a hybrid time interv al [ τ ? , t ? ) × { j } , with τ ? < t ? and inf z ∈ C ∪ D k ( φ ? ( τ , j ) − z , φ ( τ , 0) − z ) k < s or inf z ∈ D k ( φ ? ( τ , j ) − G ( z ) , φ ( τ , 0) − z ) k < s for τ ∈ [ τ ? , t ? ) and, since (vi) holds, the only remaining option is ( t ? , j ) = (0 , 0), in which (v) contradicts (A.3). A contradiction is found in every scenario and ˜ > 0. Since (A.2) implies k φ ( t, ˜ ) − G ( z 1 ) k ≤ s , s < K and z 1 ∈ b D has b een obtained ab ov e, w e find φ ( t, ˜ ) ∈ G ( D ∩ B 2 K ) + B K , suc h that k φ ( t, ˜ ) k < ¯ K fol- lo ws from the construction of ¯ K . As, in addition, φ ( t, ˜ ) ∈ G ( D ) + B s holds, s < 3 and 3 is selected as in Lemma 4 with 4 = min( ε, 2 r ) 2(1+ ˜ F ) , there exists t 0 ∈ [ t − min( ε, 2 r ) 2(1+ ˜ F ) , t ] suc h that φ ( t 0 , ˜ ) ∈ G ( D ). Similarly , w e infer that inf z ∈ b D k ( φ ? ( τ , j ) − z , φ ( τ , ˜ ) − G ( z )) k ≤ s for τ ∈ [ t ? , t ] and t ? = max( t 0 , min { t ∈ R : ( t, j ) ∈ dom φ ? } ). Hence, φ ? ( t ? , j ) ∈ D + B s (A.4) is obtained, which implies φ ? ( t ? , j ) / ∈ G ( D ) and t ? = t 0 . F rom φ ( t 0 , ˜ ) ∈ G ( D ), ˜ ≥ 1 and item (iii), we find ( t 0 , ˜ − 1) ∈ dom φ . Since | t − t 0 | ≤ min( ε, 2 r ) 2(1+ ˜ F ) < ε , we will conclude this case and sho w that ( t 0 , j 0 ), with j 0 = ˜ − 1, satisfies k φ ? ( t, j ) − φ ( t 0 , j 0 ) k < ε . W e first prov e ρ A 00 ( φ ? ( t 0 , j ) , φ ( t 0 , ˜ − 1)) ≤ ε 2 (A.5) holds by considering the case of t 0 = 0 separately , fol- lo w ed b y the case in whic h t 0 > 0. If t 0 = 0, w e use φ ? ( t 0 , j ) / ∈ G ( D ) obtained ab ov e to deduce j = 0 and φ ( t 0 , ˜ − 1) ∈ D to deduce ˜ − 1 = 0 (since G ( D ) ∩ D = ∅ b y item (i)), such that k φ ? ( t 0 , j ) − φ ( t 0 , ˜ − 1) k = k φ ? (0 , 0) − φ (0 , 0) k ≤ s b y (v). As ρ A 00 ( x, y ) ≤ k x − y k for all x, y ∈ C ∪ D and s ≤ ε 2 , we obtain (A.5). If t 0 > 0, using items (i) and (iii) and the inclusion ( t 0 , ˜ − 1) ∈ dom φ , we observe that there exists a time t 00 < t 0 suc h that for τ ∈ ( t 00 , t 0 ) , the equality { ∈ { 0 , 1 , . . . } : ( τ , ) ∈ dom φ } = { ˜ − 1 } (A.6) holds, i.e., no jumps of φ o ccur in the op en contin uous- time in terv al ( t 00 , t 0 ). F rom (A.4) w e find that ( τ , j ) ∈ dom φ ? holds for all τ ∈ ( t 000 , t 0 ) , and some t 000 ∈ [ t 00 , t 0 ). F or τ ∈ ( t 000 , t 0 ), (vi) implies ρ A ( φ ? ( τ , j ) , φ ( τ , ˜ − 1)) < s for τ ∈ ( t 000 , t 0 ). Hence, for a sequence { τ k } k ∈ N with τ k ∈ ( t 000 , t 0 ) and lim k →∞ τ k = t 0 w e find lim k →∞ φ ? ( τ k , j ) ∈ D + B s , lim k →∞ φ ( τ k , ˜ − 1) ∈ D and lim k →∞ ρ A ( φ ? ( τ k , j ), φ ( τ k , ˜ − 1)) ≤ s . F or each sufficien tly large k , ρ A ( φ ? ( τ k , j ) , φ ( τ k , ˜ − 1)) = ρ A 00 ( φ ? ( τ k , j ) , φ ( τ k , ˜ − 1)). Namely , if x 1 ∈ D + B s and x 2 ∈ D , then ρ A ( x 1 , x 2 ) ≤ s implies ρ A ( x 1 , x 2 ) = ρ A 00 ( x 1 , x 2 ). By con tinuit y of ρ A 00 and con tin uity of the h ybrid arcs for fixed j , ˜ , w e find lim k →∞ ρ A 00 ( φ ? ( τ k , j ) , φ ( τ k , ˜ − 1)) = ρ A 00 ( φ ? ( t 0 , j ) , φ ( t 0 , ˜ − 1)) ≤ s . With ρ A 00 ( φ ? ( t 0 , j ) , φ ( t 0 , ˜ − 1)) ≥ 1 √ 2 k φ ? ( t 0 , j ) − φ ( t 0 , ˜ − 1) k and s < ε 2 √ 2 ˜ F , w e find (A.5). F rom ρ A 01 ( φ ? ( t, j ) , φ ( t, ˜ )) = inf z ∈ D k ( φ ? ( t, j ) − z , φ ( t, ˜ ) − G ( z )) k < s , we find φ ? ( t, j ) ∈ D + B s and, since s ≤ r ˜ F +1 and | t 0 − t | ≤ min( ε, 2 r ) 2(1+ ˜ F ) ≤ r ˜ F +1 , we obtain ˙ φ ? ( τ , j ) ≤ ˜ F for τ ∈ [ t 0 , t ]. Exploiting | t 0 − t | ≤ ε 2(1+ ˜ F ) and ˜ F 1+ ˜ F < 1, we get k φ ? ( t 0 , j ) − φ ? ( t, j ) k < | t 0 − t | ˜ F ≤ ε 2 . With (A.5) and j 0 = ˜ − 1, w e find k φ ? ( t, j ) − φ ( t 0 , j 0 ) k ≤ k φ ? ( t, j ) − φ ? ( t 0 , j ) k + k φ ? ( t 0 , j ) − φ ( t 0 , j 0 ) k < ε , suc h that ( t 0 , j 0 ) satisfy the theorem conditions. Case 3: z 2 ∈ D , z 1 = G ( z 2 ) . Since φ ( t, ˜ ) is close to 5 D , we will apply Lemma 3 to pro ve a jump of φ will o ccur so on, and select ( t 0 , j 0 ) directly after this jump. Subsequen tly , w e conclude this case by showing that item (i) of Definition 1 holds for this hybrid time instant. F or this pur p ose, first, we observ e that z 2 ∈ b D holds also in the case where D is un b ounded. Namely , as (A.2) im- plies k φ ? ( s ) − G ( z 2 ) k < s and s < K , we find with (iv) that k G ( z 2 ) k < 2 K . Hence, z 2 ∈ G − 1 ( D ∩ B 2 K ) ⊆ B ¯ K holds b y construction of ¯ K and ( z 1 , z 2 ) ∈ A 10 is v eri- fied. Since k φ ( t, ˜ ) − z 2 k < s < K follows from (A.2), w e find k φ ( t, ˜ ) k < ¯ K and φ ( t, ˜ ) ∈ D + B s . Since s < 1 , w e can apply Lemma 3 and conclude there exists a time t 0 ∈ [ t, t + min( ε, 2 r ) 2(1+ ˜ F ) ] such that φ ( t 0 , ˜ ) ∈ b D . With items (i) and (ii), w e find ( τ , ˜ + 1) ∈ dom φ for τ ∈ [ t 0 , t 00 ), with some t 00 > t 0 . Reasoning analogously as in Case 2, we obtain ( t 0 , j ) ∈ dom φ ? , φ ? ( t 0 , j ) ∈ G ( D ) + B s , suc h that φ ? ( t 0 , j ) / ∈ D and, c ho osing t 000 sufficien tly small, w e find ( τ , j ) ∈ dom φ ? for τ ∈ [ t 0 , t 000 ). T aking a sequence { τ k } k ∈ N with τ k > t 0 and lim k →∞ τ k = t 0 , we find lim k →∞ ρ A 00 ( φ ? ( τ k , j ) , φ ( τ k , ˜ + 1)) = ρ A 00 ( φ ? ( t 0 , j ) , φ ( t 0 , ˜ + 1)) ≤ s . As s < ε 2 √ 2 ˜ F and ˜ F ≥ 1, w e find k φ ? ( t 0 , j ) − φ ( t 0 , ˜ + 1) k < ε 2 . F rom (A.2) and z 2 ∈ b D , we find φ ? ( t, j ) ∈ G ( b D ) + B s and, since s < r ˜ F +1 , w e obtain ˙ φ ? ( τ , j ) ≤ ˜ F for τ ∈ [ t, t 0 ], since | t 0 − t | < min( ε, 2 r ) 2(1+ ˜ F ) < r ˜ F +1 . W e deduce k φ ? ( t 0 , j ) − φ ? ( t, j ) k < | t − t 0 | ˜ F ≤ ε 2 from | t − t 0 | ≤ ε 2(1+ ˜ F ) . Selecting j 0 = ˜ + 1, w e obtain k φ ? ( t, j ) − φ ( t 0 , j 0 ) k ≤ k φ ? ( t, j ) − φ ( t 0 , j ) k + k φ ? ( t 0 , j ) − φ ( t 0 , j 0 ) k ≤ ε , and the conclusion of the theorem is verified. As ( t 0 , j 0 ) has b een constructed for all three cases and arbitrary ( t, j ) ∈ dom φ ? , the theorem is prov en. 2 PR OOF of THEOREM 2. W e exploit items (i) and (ii) of Definition 2 and Theorem 1 to conclude stability in graphical sense as defined in Definition 1, and exploit the combination of (iii), (iv) of Definition 2 and The- orem 1 to conclude (asymptotic) stability in graphical sense. Given a pair of solutions ( φ ? , φ ), Theorem 1 only pro vides statemen ts for all ( t, j ) ∈ dom φ ? , (see item (i) of Definition 1). Statemen t (ii) of Definition 1 is attained b y another application of Theorem 1 for the solution pair ( φ ? 0 , φ 0 ), which we select as ( φ, φ ? ). (Asymptotic) stabilit y of φ ? with resp ect to ρ A will b e used to show that (vi) of Theorem 1 holds for both solution pairs ( φ ? , φ ) and ( φ ? 0 , φ 0 ). Consider system (1) and solution φ ? satisfying the conditions of Theorem 2. W e select K > 0 suc h that either k φ ? ( t, j ) k < K holds for all ( t, j ) ∈ dom φ ? or k x k < K for x ∈ D , cf. (iv) of Theorem 1. Exploiting also item (i) in Theorem 1 and lo cal b oundedness of G if D is unbounded, we can select a scalar K 0 suc h that the combination of the inequalit y ρ A ( φ ? ( t, j ) , y ) < K for any y ∈ D and item (iv) of Theorem 1 implies k y k < K 0 for any ( t, j ) ∈ dom φ ? . Let φ ? b e stable with resp ect to ρ A . T o pro v e existence of a scalar δ > 0 for an y ε > 0 (see Definition 1) suc h that (i) and (ii) in Definition 1 hold, we first fix an arbitrary ε > 0. By application of Theorem 1, w e find a scalar s > 0 suc h that for an y solution φ that satisfies (v)-(vi) of Theorem 1, item (i) of Definition 1 holds. Consider- ing the pair ( φ ? 0 , φ 0 ) = ( φ, φ ? ) of solutions, we apply Theorem 1 and find s 0 > 0 such that if φ satisfies (v)- (vi), with s replaced by s 0 , for every ( t 0 , j 0 ) ∈ dom φ, there exists a hybrid time ( t, j ) ∈ dom φ ? , with | t − t 0 | < ε , such that k φ ? ( t, j ) − φ ( t 0 , j 0 ) k < ε . W e no w select δ = δ w (min( s, s 0 , K )), with δ w ( · ) giv en in Definition 2, and consider an arbitary solution φ with k φ ? (0 , 0) − φ (0 , 0) k < δ (cf. Definition 1) and will show that conditions (i) and (ii) in Definition 1 hold. W e note that ρ A ( φ ? (0 , 0) , φ (0 , 0)) ≤ k φ ? (0 , 0) − φ (0 , 0) k < δ ≤ δ w ( s ) implies that item (i) of Definition 2 is verified with ε w = s . Hence, for the solution pair ( φ ? , φ ) with scalar s , condition (v) of Theorem 1 holds and, by item (i) of Definition 2, we conclude that (vi) of Theorem 1 holds. As (iv) holds b y assumption, we apply Theorem 1 and conclude item (i) of Definition 1. W e note that ρ A ( φ ? (0 , 0) , φ (0 , 0)) ≤ k φ ? (0 , 0) − φ (0 , 0) k < δ w ( s 0 ) implies that item (ii) of Definition 2 is v erified with ε w = s 0 . Hence, aiming to apply Theorem 1 with the solution pair ( φ ? 0 , φ 0 ) = ( φ, φ ? ) and scalar s 0 , w e observe that condition (v) holds and, b y item (ii) of Definition 2, w e conclude that (vi) of Theorem 1 holds (also for the pair ( φ ? 0 , φ 0 )). As (iv) of the same theorem holds b y assumption, we can apply Theorem 1 to con- clude that item (i) of Definition 1 holds for the solution pair ( φ ? 0 , φ 0 ). As a direct consequence, item (ii) of Defi- nition 1 holds for the solution pair ( φ ? , φ ). Since we hav e pro v en (i) and (ii) for this solution pair, and φ is selected arbitrarily , the solution φ ? is stable in graphical sense. W e now show asymptotic stability . Assume that φ ? is asymptotically stable with respect to ρ A , let r = r w > 0 b e as in Definition 2, and select ε > 0 arbitrarily . Giv en ε , let s b e as in Theorem 1 and let s 0 b e selected as ab o ve. In addition, consider an y φ with k φ ? (0 , 0) − φ (0 , 0) k ≤ r . Applying Lemma 3 with 2 = ε , we find some p ositive scalar 1 . Let ¯ s > 0 b e as in the pro of of Theorem 1. W e no w consider Definition 2 with ε w = min( s √ 2 , s 0 √ 2 , 1 , ¯ s ), and find that there exists a time T w > 0 such that items (iii) and (iv) of Definition 2 hold. In partic- ular, this implies that there exist J w , J 0 w suc h that ρ A ( φ ? ( T w , J w ) , φ ( T w , J 0 w )) < ε w . With ε w ≤ 1 and Lemma 3, we conclude that there exist h ybrid times ( T , J ) ∈ dom φ ? and ( T , J 0 ) ∈ dom φ , with T ∈ [ T w , T w + ε ], such that ρ A ( φ ? ( T , J ) , φ ( T , J 0 )) = ρ A 00 ( φ ? ( T , J ) , φ ( T , J 0 )), where the design of ¯ s and ε w ≤ ¯ s are used. F rom ρ A 00 ( φ ? ( T , J ) , φ ( T , J 0 ) < ε w , we conclude k φ ? ( T , J ) − φ ( T , J 0 ) k < min( s, s 0 ). Let ( φ ? s , φ s ) be constructed such that φ ? ( T + t, J + j ) = φ s ( t, j ) for all ( t, j ) ∈ dom φ ? s and φ ( T + t, J 0 + j ) = φ s ( t, j 0 ) for all ( t, j 0 ) ∈ dom φ s . F or ( φ ? s , φ s ) and ( φ s , φ ? s ), all conditions of Theorem 1 hold, such that items (i),(ii) of Definition 1 follow for ( φ ? s , φ s ) and ( φ s , φ ? s ). W e con- 6 clude that the scalar T > 0 constructed ab ov e ensures items (iii) and (iv) of Definition 1. Consequently , φ ? is asymptotic al ly stable in gr aphic al sense . 2 7
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment