자율주행차를 활용한 교통 안정화 연속 평균장 게임 접근
본 논문은 인간 차량을 비평형 Aw‑Rascle‑Zhang(ARZ) 모델로, 자율주행차(AV)를 평균장 게임(MFG)으로 모델링하여 순수 AV 교통과 혼합 교통의 안정성을 연속 PDE 프레임워크에서 분석한다. 선형 안정성 분석과 수치 실험을 통해 AV의 침투율과 제어 설계가 교통 흐름을 안정화시키는 메커니즘을 정량화한다.
저자: Kuang Huang, Xuan Di, Qiang Du
논문은 교통 흐름의 안정성을 연속 미시 모델과 평균장 게임(MFG)이라는 두 이론적 도구를 결합해 분석한다. 서론에서는 인간 운전자가 만든 교통 불안정 현상과 AV가 이를 완화할 가능성을 실험적·모델링적 관점에서 소개한다. 기존 연구는 미시적 차량-차량 상호작용을 기반으로 한 선형 안정성 분석에 의존했으며, 차량 수가 늘어나면 네트워크 토폴로지와 통신 구조가 복잡해지는 확장성 문제를 지적한다. 이를 해결하기 위해 연속 PDE 접근법을 채택한다.
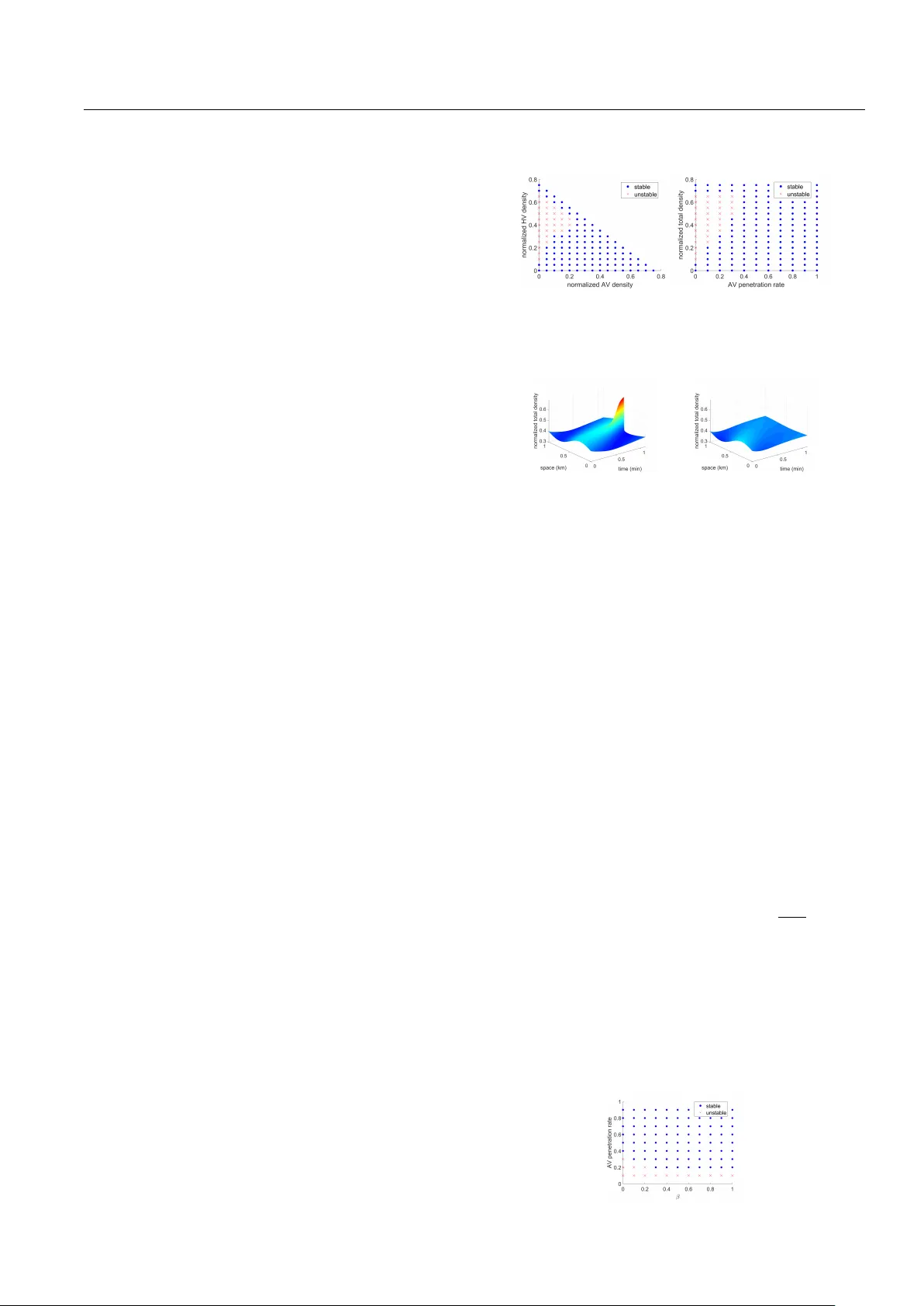
본문 2절에서는 평균장 게임과 Aw‑Rascle‑Zhang(ARZ) 모델을 각각 AV와 인간 차량의 대표 모델로 제시한다. MFG는 무한대 인구 한계에서 각 에이전트가 전체 밀도 분포에만 의존해 최적 제어를 수행한다는 가정 하에, HJB 방정식(후방)과 연속 방정식(전방)이라는 두 PDE로 구성된다. ARZ는 연속 방정식과 관성 방정식으로 이루어지며, 비평형 특성(희망 속도와 실제 속도 간 이완 시간 τ) 때문에 교통 파동이 발생한다. ARZ의 선형 안정성 조건 h′(ρ̄)>−U′(ρ̄)은 인간 차량이 특정 밀도 구간에서 본질적으로 불안정함을 보여준다.
3절에서는 순수 AV 교통을 위한 MFG 모델을 구체화한다. 비용 함수 f(u,ρ)=½(u/u_max)^2−u/u_max+uρ/(u_maxρ_jam) 은 에너지, 효율성, 안전성을 동시에 고려한다. 최적 제어는 HJB 방정식(4)·(5)와 연속 방정식(6)으로 결합되며, 속도 제한을 위한 절단 함수 g
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기