안정화 제어기의 새로운 시스템‑레벨·입출력 파라미터화와 수치적 견고성
본 논문은 내부 안정성을 보장하는 모든 제어기 집합 𝒞ₛₜₐᵦ을 폐쇄‑루프 전달 행렬을 이용해 네 가지 완전하고 배타적인 파라미터화로 표현한다. 기존의 Youla, 시스템‑레벨 파라미터화(SLP), 입력‑출력 파라미터화(IOP) 외에 두 개의 새로운 파라미터화가 제안된다. FIR 근사 시 IOP가 가장 작은 보수성을 보이며, 수치 연산에서 발생하는 평등 제약식 위반에 대해서는 IOP가 개방‑루프 안정 시스템에 대해 강인하지만 불안정 시스템에서는…
저자: Yang Zheng, Luca Furieri, Maryam Kamgarpour
본 논문은 내부 안정성을 만족하는 모든 LTI 제어기 집합 𝒞ₛₜₐᵦ을 폐쇄‑루프 전달 행렬을 이용해 네 가지 완전하고 배타적인 파라미터화로 기술한다. 먼저, 내부 안정성 정의와 기존의 Youla 파라미터화가 이중‑공소 분해에 의존한다는 점을 소개한다. 이후, 최근 제안된 시스템‑레벨 파라미터화(SLP)와 입력‑출력 파라미터화(IOP)가 이중‑공소 분해 없이도 𝒞ₛₜₐᵦ을 완전하게 표현한다는 사실을 정리한다.
**1. 파라미터화의 완전성**
저자는 (δₓ, δ_y, δ_u) → (x, y, u) 전반적인 폐쇄‑루프 전이 행렬을 모두 고려한다. 외부 전달 행렬이 안정하면 내부 안정성이 보장되는 경우는 네 가지뿐이며, 이는 정리 1에 의해 증명된다. 이 네 경우는 다음과 같다.
- **그룹 A**: SLP에서 사용되는 (δₓ, δ_y) → (x, u) 매핑.
- **그룹 B**: IOP에서 사용되는 (δ_y, δ_u) → (y, u) 매핑.
- **그룹 C**: 새로운 파라미터화 1, 즉 (δₓ, δ_u) → (x, u) 매핑.
- **그룹 D**: 새로운 파라미터화 2, 즉 (δₓ, δ_y) → (x, y) 매핑.
그룹 C와 D는 기존 문헌에 등장하지 않았으며, 각각 프라포지션 3과 4에서 구체적인 선형 관계와 평등 제약식을 제시한다. 이들 제약식은 모두 안정한 전달 행렬을 보장하는 충분조건이며, 서로 변환 가능한 선형 변환 관계가 존재한다(정리 1의 증명 과정 참조).
**2. FIR 근사와 파라미터화 간 보수성 비교**
실제 최적화 문제에서는 무한 차원의 변수들을 다루기 어렵다. 따라서 FIR(유한 임펄스 응답) 근사를 적용해 각 파라미터화의 결정 변수를 유한 차원으로 제한한다. 저자는 FIR 제약을 적용했을 때 각 파라미터화가 원래 𝒞ₛₜₐᵦ을 얼마나 정확히 근사하는지를 정리 2를 통해 비교한다. 핵심 결과는 다음과 같다.
- IOP는 입력‑출력 관계만을 직접 다루므로, FIR 차원 제한 하에서도 가장 넓은 안정화 가능한 제어기 집합을 포함한다.
- SLP과 새로운 파라미터화는 상태 혹은 외란에 대한 매핑을 포함하므로, FIR 차원 감소가 내부 안정성 보장을 약화시킨다.
- 특히, FIR 차원이 충분히 크지 않으면 SLP 기반 설계가 일부 안정한 제어기를 놓칠 수 있다.
**3. 상태공간 실현**
FIR 근사 후 얻어지는 파라미터화 변수들을 실제 디지털 제어기로 구현하기 위해, 저자는 정리 3에서 각 파라미터화에 대응하는 상태공간 실현을 제시한다. 이 실현은 (A_k, B_k, C_k, D_k) 형태의 컨트롤러 매개변수를 직접 계산할 수 있게 하며, 구현 시 연산 복잡도와 메모리 요구량을 명시한다.
**4. 수치적 견고성 분석**
평등 제약식은 부동소수점 연산에서 정확히 만족되지 않는다. 이로 인해 설계된 제어기가 실제 구현 시 내부 안정성을 잃을 위험이 있다. 논문은 세 가지 주요 결과를 제시한다.
- **IOP의 견고성**: 정리 4에 따르면, 개방‑루프가 안정한 경우 작은 제약식 위반이 발생해도 폐쇄‑루프는 안정성을 유지한다. 그러나 개방‑루프가 불안정한 경우, 동일한 위반은 즉시 불안정을 초래한다. 따라서 불안정 플랜트에 IOP를 적용하려면 사전 안정화 단계가 필요하다.
- **새로운 파라미터화의 견고성**: 그룹 C와 D 역시 정리 4와 유사한 성질을 가지며, 개방‑루프 안정성 여부에 따라 견고성이 달라진다.
- **SLP의 견고성**: 4‑블록 SLP(출력‑피드백 형태)는 정리 5에서 제시된 바와 같이, 평등 제약식 위반이 작더라도 시스템이 불안정해질 수 있음을 보인다. 이는 상태‑피드백 SLP에서는 문제가 없지만, 일반 출력‑피드백에서는 추가 검증이 필요함을 의미한다.
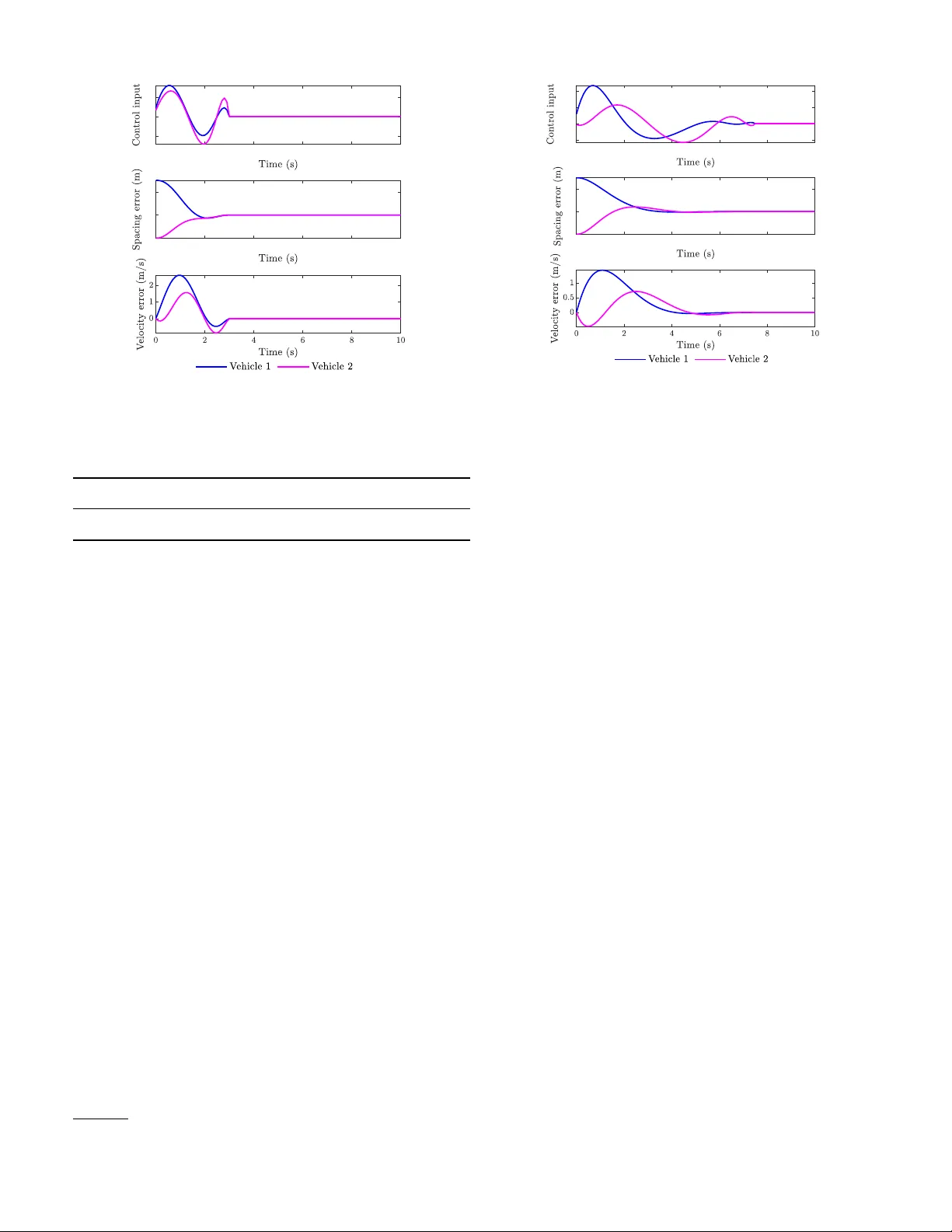
**5. 실험 및 적용**
섹션 7에서는 2차 시스템을 대상으로 각 파라미터화와 FIR 차원 변화를 실험한다. 결과는 IOP가 가장 작은 FIR 차원에서도 목표 성능을 달성하고, SLP은 FIR 차원이 충분히 클 때만 동일한 성능을 보임을 확인한다. 또한, 수치적 위반을 인위적으로 삽입했을 때 IOP는 안정성을 유지했으나 SLP은 급격히 불안정해지는 현상이 관찰되었다.
**6. 결론**
논문은 (i) 내부 안정성을 보장하는 네 가지 완전한 파라미터화, (ii) FIR 근사 시 IOP가 가장 적은 보수성을 보임, (iii) 수치적 견고성 측면에서 IOP는 개방‑루프 안정 시스템에 강인하지만 불안정 시스템에는 사전 안정화가 필요함, (iv) SLP은 상황에 따라 수치적 취약성을 가질 수 있음을 종합적으로 제시한다. 이러한 결과는 대규모 분산 제어, 학습 기반 제어, 그리고 실시간 디지털 구현 등 다양한 현대 제어 응용 분야에서 어떤 파라미터화를 선택해야 할지에 대한 이론적·실용적 가이드를 제공한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기