System-level, Input-output and New Parameterizations of Stabilizing Controllers, and Their Numerical Computation
It is known that the set of internally stabilizing controller $\mathcal{C}_{\text{stab}}$ is non-convex, but it admits convex characterizations using certain closed-loop maps: a classical result is the Youla parameterization, and two recent notions a…
Authors: Yang Zheng, Luca Furieri, Maryam Kamgarpour
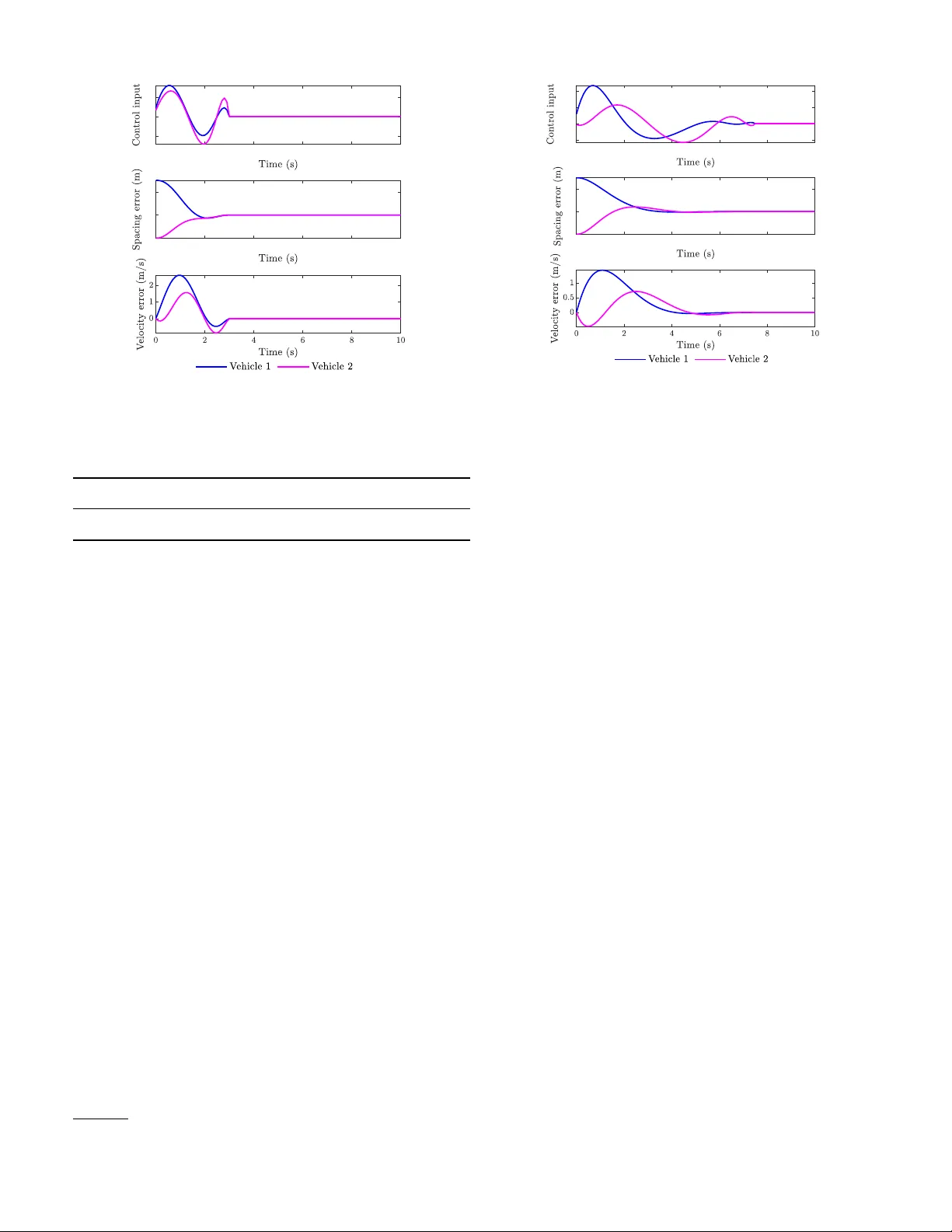
System-lev el, Input-output and New P arameterizations of Stabilizing Con trollers, and Their Numerical Computation Y ang Zheng a , Luca F urieri d , c , Mary am Kamgarp our d , Na Li b a Dep artment of Ele ctric al and Computer Engineering, University of California San Die go, CA 92093. b Scho ol of Engine ering and Applie d Sciences, Harvar d University, Boston, MA, 02138, U.S. c Automatic Contr ol L ab or atory, ETH Zurich, Switzerland. d Institute of Me chanic al Engine ering, ´ Ec ole Polyte chnique F´ ed´ er ale de L ausanne (EPFL), Switzerland Abstract It is kno wn that the set of internally stabilizing controller C stab is non-con v ex, but it admits con v ex c haracterizations using certain closed-lo op maps: a classical result is the Y oula parameterization, and t w o recen t notions are the system-level pa- rameterization (SLP) and the input-output parameterization (IOP). In this paper, w e address the existence of new con vex parameterizations and discuss p oten tial tradeoffs of eac h parametrization in differen t scenarios. Our main con tributions are: 1) W e reveal that only four groups of stable closed-lo op transfer matrices are equiv alent to internal stability: one of them is used in the SLP , another one is used in the IOP , and the other tw o are new, leading to t wo new conv ex parameterizations of C stab . 2) W e inv estigate the prop erties of these parameterizations after imp osing the finite impulse response (FIR) approximation, rev ealing that the IOP has the best abilit y of approximating C stab giv en FIR constraints. 3) These four parameterizations require no a priori doubly-coprime factorization of the plan t, but impose a set of equalit y constrain ts. How ev er, these equal- it y constrain ts will nev er be satisfied exactly in floating-p oint arithmetic computation and/or implementation. W e pro v e that the IOP is n umerically robust for open-lo op stable plan ts, in the sense that small mismatches in the equalit y constrain ts do not compromise the closed-loop stabilit y; but a direct IOP implementation will fail to stabilize open-lo op unstable systems in practice. The SLP is kno wn to enjo y n umerical robustness in the state feedback case; here, we sho w that n umerical robustness of the four-blo ck SLP controller requires case-b y-case analysis ev en the plan t is op en-lo op stable. Key wor ds: In ternal stabilit y , Y oula parameterization, System-level synthesis, Con v ex optimization. 1 In tro duction F eedbac k systems m ust be stable in some appropriate sense for practical deplo yment, and thus one fundamen tal problem in con trol theory is to design a feedbac k controller that stabilizes a given dynamical system [1]. Indeed, many con trol syn thesis problems include stability as a constrain t while optimizing some performance [2]. Ho wev er, it is w ell- kno wn that the set of stabilizing controllers is non-conv ex, and hence, hard to searc h directly ov er. One standard ap- proac h is to parameterize all stabilizing con trollers and the corresp onding closed-lo op resp onses in a conv ex w ay , and then to optimize the performance o ver the new parame- ter(s) using conv ex optimization [3]. A classical method for parameterizing the set of all in- ternally stabilizing controllers is based on the celebrated ? The material of this pap er was not presen ted at an y confer- ence. This work is supp orted by NSF career 1553407, AF OSR Y oung In vestigator Program, and ONR Y oung In v estigator Pro- gram. L. F urieri and M. Kamgarp our are gratefully supp orted b y ER C Starting Grant CONENE. Email addr esses: zhengy@eng.ucsd.edu (Y ang Zheng), luca.furieri@epfl.ch (Luca F urieri), maryam.kamgarpour@epfl.ch (Mary am Kamgarp our), nali@seas.harvard.edu (Na Li). Y oula p ar ameterization [4] which relies on a doubly-coprime factorization of the system. It is sho wn in [3] that many p erformance sp ecifications on the closed-lo op system can b e expressed in the Y oula parameterization framework via con v ex optimization. Moreov er, the foundational results of robust and optimal control are built on the Y oula param- eterization [1, 5]. Recently , a system-level p ar ameterization (SLP) [6] and an input-output p ar ameterization (IOP) [7] w ere prop osed to characterize the set of internally stabiliz- ing controllers, without relying on the doubly-coprime fac- torization technique. In principle, Y oula, the SLP , and the IOP all directly treat certain closed-loop responses as de- sign parameters and th us shift the con troller synthesis from the design of a con troller to the design of the closed-loop resp onses. W e note that an open-source Python-based im- plemen tation for the SLP and the IOP is av ailable [8]. Besides the classical control synthesis problems [1, 5], closed-lo op parameterizations are p ow erful to ols in other areas, including distributed optimal con trol [9–14] and quan tifying the p erformance of learning in control [15–20]. In distributed control, the goal is to design sub-controllers relying on lo cally a v ailable information, which is crucial for man y cyb er-physical systems. Enforcing these information constrain ts, how ever, may mak e the problems computa- tionally intractable [21, 22]. Nevertheless, it is w ell-known Automatica F ebruary 7, 2022 that a notion of quadr atic invarianc e (QI) [9, 11, 14] allows equiv alently translating information constrain ts on the con- troller to conv ex constrain ts on the Y oula parameter, th us preserving the conv exity of distributed con troller syn thesis. The QI notion can also b e in tegrated with the SLP and the IOP , resulting in equiv alent conv ex reformulations [6, 7]. T ogether with a recent notion of Sp arsity Invarianc e [23], these closed-lo op parameterizations enable deriving con- v ex appro ximations for problems with general sparsity constrain ts b eyond QI; see [24, Remark 5] for example. F or learning in control, the SLP was in tegrated within a Co arse-ID con trol pro cedure to deriv e a sample complex- it y bound for learning the classical linear quadratic regula- tor (LQR) [15]. This pro cedure was exploited in [16] to de- riv e high probability guaran tees of sub-linear regret using an adaptiv e LQR con trol architecture. In [17, 18], based on the Y oula parameterization, an online gradien t descen t al- gorithm w as prop osed to achiev e sub-linear regret for learn- ing the linear quadratic gaussian (LQG) con troller. In [19], the Y oula framew ork w as used to derive a sample complex- it y b ound on learning the glob al ly optimal distributed con- troller sub ject to QI constrain ts. The IOP was also used to deriv e an end-to-end sample complexit y bound on learn- ing LQG con trollers for stable systems [20]. The results in [17–20] motiv ate the shift from static con trollers to dy- namic ones in complex learning-based control tasks. Y oula [4], the SLP [6], and the IOP [7] are fundamen- tal building blo c ks for distributed controller synthesis and learning-based con trol applications. Nev ertheless, a few critical issues hav e b een left unexplored. First, while it is kno wn that Y oula, the SLP , and the IOP are all equiv- alen t [24], it remains unclear whether there exist other equiv alent parameterizations be y ond them. Second, the decision v ariables in these closed-loop parameterizations are, in general, infinite-dimensional. The works [6, 7, 25] enforce finite impulse r esp onse (FIR) constraints on the de- cision v ariables to enable formulation as finite-dimensional con v ex optimization problems. How ever, these w orks do not characterize the conserv atism introduced by the FIR appro ximation using different parameterizations. Third, unlik e Y oula, the SLP and the IOP do not need to know a doubly-coprime factorization a priori , and instead intro- duce a set of equalit y constrain ts for ac hiev able closed-loop resp onses. A fact that is not in v estigated in the SLP [6, 25], the IOP [7] or the recent work [24] is that the set of equal- it y constraints can nev er be satisfied exactly in numerical computation, p otentially affecting the closed-lo op stability . 1.1 Contributions This pap er aims to in vestigate the issues raised ab ov e and provide a complete understanding of closed-lo op pa- rameterizations. W e in tro duce new parameterizations b e- y ond SLP/IOP and discuss tradeoffs among these param- eterizations in differen t scenarios. Note that our previous w ork [24] established explicit affine mappings among Y oula, SLP , and IOP parameters, but it provides no inv estigation of the issues men tioned ab ov e. Sp ecifically , the contribu- tions of this pap er are as follows. First, w e examine all p ossible parameterizations for the set of internally stabilizing controllers C stab using closed- lo op responses from the disturbances ( δ x , δ y , δ u ) to state, - ? - e y δ y + + e 6 δ u u x + + K B + + + e ? δ x z -1 - A 6 C G Figure 1. Interconnection of the plant G and the controller K . output, con trol signals ( x , y , u ); see Figure 1 for illustration. Our strategy is to examine the cases where the stability of external transfer matrices is equiv alent to internal stabil- it y . W e rev eal that only four groups of stable disturbance- to-signal maps can guaran tee in ternal stabilit y (see Theo- rem 1): one of them is used in the SLP [6], another one is a classical result and is used in the IOP [7], and the other t wo ha v e not b een discussed b efore and th us can b e used to de- riv e t w o new parameterizations (Propositions 3 and 4). Our results are c omplete and exclusive , in the sense that there are no other parameterizations for C stab using closed-lo op resp onses from ( δ x , δ y , δ u ) to ( x , y , u ). Second, we inv estigate the impact of imp osing FIR con- strain ts on the closed-loop parameterizations. W e show that the IOP pro vides the tightest approximation of C stab after imp osing FIR constrain ts (Theorem 2). This result is en- abled b y the fact that the IOP directly deals with the maps from inputs to outputs without passing through the system state, while the SLP and the t wo new parametrizations ex- plicitly in volv e the system state or disturbances on the sys- tem state. Motiv ated by [26], w e characterize state-space realizations for the controllers in closed-loop parameteri- zations after imp osing FIR approximations (Theorem 3). The s tate-space realizations provide easily implemen table con trollers for practical deploymen t. Third, we quan tify the n umerical robustness of closed- lo op parameterizations due to floating-p oint arithmetic in b oth numerical computation and con troller implementa- tion. W e prov e that in the IOP , small n umerical mismatches in the equalit y constraints do not compromise closed-lo op stabilit y for op en-lo op stable plants, but will destabilize the closed-lo op system for unstable plan ts (Theorem 4). This result holds similarly for the tw o new closed-loop param- eterizations. W e also sho w that, in general, the four-block SLP controller in the output-feedback case is vulnerable to destabilization due to small mismatc hes in the equal- it y constraints (Theorem 5), no matter whether the plant is op en-lo op stable or unstable. This issue arises irresp ec- tiv e of whic h SLP controller implemen tation is used [6, 25]. These results suggest that it is un wise to directly apply the IOP or related parameterizations for op en-lo op unsta- ble systems; instead, utilizing a pre-stabilizing con troller is more app ealing since it av oids the destabilization issue. 1.2 Pap er Structur e The rest of this paper is organized as follo ws. W e state the problem in Section 2. The relationship b etw een the sta- bilit y of external transfer matrices and internal stability is rev ealed in Section 3. F our parameterizations of stabilizing con trollers using closed-loop resp onses, including the SLP 2 and the IOP , are presen ted in Section 4. Numerical compu- tation using the FIR constrain ts and controller implemen- tation are discussed in Section 5. W e inv estigate the nu- merical robustness of closed-loop parameterizations in Sec- tion 6. A numerical application is shown in Section 7, and w e conclude the pap er in Section 8. 1.3 Notation The symbols R and N refer to the set of real and integer n um b ers, resp ectively . W e use low er and upp er case letters ( e.g. x and A ) to denote vectors and matrices, resp ectively . Lo w er and upper case b oldface letters ( e.g. x and G ) are used to denote signals and transfer matrices, respectively . W e denote the set of real-rational prop er stable 1 transfer matrices as RH ∞ . W e use the notation G ∈ 1 z RH ∞ to de- note that G is stable and strictly prop er. Given G ∈ RH ∞ , w e denote its H ∞ norm by k G k ∞ := sup ω σ max ( G ( e j ω )), where σ max ( · ) denotes the maximum singular v alue. Given a stable transfer matrix G ( z ), the square of its H 2 norm is k G k 2 H 2 := 1 2 π R π − π T race G ∗ ( e j ω ) G ( e j ω ) dω . F or simplic- it y , w e omit the dimension of transfer matrices, which shall b e clear in the context. Also, w e use I (resp. 0) to denote the identit y matrix (resp. zero matrix) of compatible di- mension. In Section 5.2, to a void ambiguit y , w e explicitly write the matrix dimension and use I p to denote the iden- tit y matrix of dimension p . Finally , the state-space realiza- tion C ( zI − A ) − 1 B + D is denoted as A B C D . 2 Problem statemen t 2.1 System mo del W e consider strictly prop er discrete-time linear time - in v ariant (L TI) plants of the form x [ t + 1] = Ax [ t ] + B u [ t ] + δ x [ t ] , y [ t ] = C x [ t ] + δ y [ t ] , (1) where x [ t ] ∈ R n , u [ t ] ∈ R m , y [ t ] ∈ R p are the state vec- tor, con trol action, and measurement vector at time t , re- sp ectiv ely; δ x [ t ] ∈ R n and δ y [ t ] ∈ R p are external dis- turbances on the state and measurement vectors at time t , resp ectively . The transfer matrix from u to y is G = C ( z I − A ) − 1 B . Consider an L TI dynamical controller u = Ky + δ u , (2) where δ u is the external disturbance on the control action. A state-space realization of (2) is ξ [ t + 1] = A k ξ [ t ] + B k y [ t ] , u [ t ] = C k ξ [ t ] + D k y [ t ] + δ u [ t ] , (3) where ξ [ t ] ∈ R q is the internal state of the controller at time t . The formulation (3) ab ov e reduces to a static controller when ( A k , B k , C k , D k ) = (0 , 0 , 0 , K ) for some K ∈ R m × p . In this pap er, we mak e the following standard assumption. 1 Throughout the paper, “stable” means “asymptotically sta- ble”, i.e. , all eigenv alues/p oles hav e strictly negativ e real parts in contin uous time (magnitudes less than 1 in discrete time). Assumption 1 Both the plant and c ontr ol ler r e alizations ar e stabilizable and dete ctable, i.e. , ( A, B ) and ( A k , B k ) ar e stabilizable, and ( A, C ) and ( A k , C k ) ar e dete ctable. Applying the con troller (2) to the plan t (1) leads to a closed-lo op system shown in Fig. 1. Since the plant is strictly proper, the closed-loop system is alw ays well- p osed [1, Lemma 5.1]. 2.2 Internal stability In ternal stability is defined as follows [1, Chapter 5.3]: Definition 1 The system in Fig. 1 is internally stable if it is wel l-p ose d, and the states ( x [ t ] , ξ [ t ]) c onver ge to zer o as t → ∞ for al l initial states ( x [0] , ξ [0]) when δ x [ t ] = 0 , δ y [ t ] = 0 , δ u [ t ] = 0 , ∀ t . W e sa y the con troller K internal ly stabilizes the plan t G if the closed-lo op system in Fig. 1 is internally stable. The set of all L TI internally stabilizing controllers is defined as C stab := { K | K in ternally stabilizes G } . (4) Note that when an infinite time-horizon is considered, a feedbac k system must at least b e stable, and any controller syn thesis will implicitly or explicitly inv olve a constraint K ∈ C stab . Therefore, it is of fundamentally imp ortance to c haracterize C stab . Indeed, it is w ell-known that C stab is non-con v ex, and it is not difficult to find explicit examples where K 1 , K 2 ∈ C stab and 1 2 ( K 1 + K 2 ) / ∈ C stab . Accordingly , it is not easy to directly search ov er K ∈ C stab for con trol syn thesis, and a suitable change of v ariables is used in many con trol synthesis pro cedures [1–7, 24]. A standard state-space characterization of internal sta- bilization is as follows. Lemma 1 ( [1, Lemma 5.2]) Under Assumption 1, K in ternally stabilizes G if and only if A cl := " A + B D k C B C k B k C A k # (5) is stable. Note that the result in Lemma 1 is a simplified v ersion of [1, Lemma 5.2] b ecause w e fo cus on strictly prop er plants for simplicit y . Lemma 1 leads to an explicit state-space char- acterization of the set C stab as follows: C stab = ( K | A cl = " A + B D k C B C k B k C A k # is stable ) , (6) where K = C k ( z I − A k ) − 1 B k + D k . Unfortunately , the stabilit y condition on A cl in (6) is still non-conv ex in terms of the parameters A k , B k , C k , D k . 2.3 Char acterizations b ase d on tr ansfer functions Unlik e the state-space parameterization (6), there are sev eral frequency-domain characterizations for C stab , where only con v ex constraints are in volv ed in certain transfer functions. A classical approac h is the celebrated Y oula p a- r ameterization [4], where a doubly-coprime factorization of the plant is used. Definition 2 A c ol le ction of stable tr ansfer matric es, U l , V l , N l , M l , U r , V r , N r , M r ∈ RH ∞ is c al le d a doubly- 3 c oprime factorization of G if P 22 = N r M − 1 r = M − 1 l N l and " U l − V l − N l M l # " M r V r N r U r # = I . Suc h doubly-coprime factorization can alwa ys b e computed if the state-space realization of G is stabilizable and de- tectable [27]. W e hav e the following equiv alence [4] C stab = { K = ( V r − M r Q )( U r − N r Q ) − 1 | Q ∈ RH ∞ } , (7) where Q is denoted as the Y oula p ar ameter . Note that the Y oula parameter Q can b e freely c hosen in RH ∞ . W e refer the interested reader to [1, 4, 5] for more details on the Y oula parameterization. Tw o recen t approaches are the system-level p ar ameter- ization (SLP) [6] and the input-output p ar ameterization (IOP) [7], where no doubly-coprime factorization is required a priori . Both the SLP and the IOP use certain closed-loop resp onses for parameterizing C stab with the addition of a set of equality constrain ts. In particular, the SLP utilizes the closed-lo op responses from ( δ x , δ y ) to ( x , u ), and the IOP relies on the closed-lo op resp onses from ( δ y , δ u ) to ( y , u ). It is known that Y oula parameterization, the SLP , and the IOP are equiv alent to eac h other [24]. Inspired by these re- sults [6, 7, 24], w e aim to inv estigate the following questions: • What are all the possible parameterizations for C stab using closed-loop resp onses, b eyond the SLP and the IOP? W e present a complete and exclusive answer by examining all closed-lo op resp onses from ( δ x , δ y , δ u ) to ( x , y , u ) (Sections 3 and 4). • All the closed-lo op parameterizations for C stab are equiv alent in theory . When applying FIR approx- imations for practical computation, are they still equiv alent? What are the corresp onding state-space realizations for controller implemen tation? Both of them are answered in Section 5. • Finally , floating-p oin t arithmetic computation and/or implemen tation alwa ys introduce small numerical mis- matc hes for equality constraints. What are the impact of these numerical mismatches for closed-lo op param- eterizations? In Section 6, we in vestigate a property termed as numeric al r obustness of closed-loop param- eterizations. 2.4 Optimal c ontr ol ler synthesis As a particular application, we consider the following optimal control problem min K lim T →∞ E " 1 T T X t =0 y T t Qy t + u T t Ru t # s.t. x [ t + 1] = Ax [ t ] + B ( u [ t ] + δ u [ t ]) , y [ t ] = C x [ t ] + δ y [ t ] , u = Ky , (8) where δ u [ t ] ∼ N (0 , I ) , δ y [ t ] ∼ N (0 , I ) , Q 0 and R 0 are p erformance-weigh t matrices with compatible dimen- sions. Problem (8) can b e reform ulated in to a problem in the frequency domain (see e.g., [20, App endix G]) min K " Q 1 2 R 1 2 # " ( I − GK ) − 1 ( I − GK ) − 1 G K ( I − GK ) − 1 ( I − K G ) − 1 # 2 H 2 s.t. K ∈ C stab , (9) where G = C ( z I − A ) − 1 B . It is easy to see that the optimal syn thesis problem (9) is non-conv ex in terms of K since b oth the cost function and constrain t are non-con vex. Instead of optimizing ov er the controller directly , we will establish a v ariety of equiv alent con v ex reformulations based up on op- timizing ov er closed-lo op resp onses. Our results will reveal computational properties and numerical robustness of such reform ulations based on closed-lo op parameterizations. W e conclude this section b y stating the following classical result, which will b e frequently used. Lemma 2 ( [1, Chapter 3]) Given a tr ansfer matrix T ( z ) = C ( z I − A ) − 1 B + D , we have • If ( A, B , C ) is dete ctable and stabilizable, then T ( z ) ∈ RH ∞ if and only if A is stable; • If ( A, B ) is not stabilizable, or ( A, C ) is not dete ctable, then the stability of A is sufficient but not ne c essary for T ( z ) ∈ RH ∞ . 3 External transfer matrix characterization of in- ternal stabilit y In this section, we revisit the external transfer matrix c haracterization of internal stability , which will b e applied to characterize C stab in the next section. Com bining (1) with (2), we can write the closed-lo op resp onses from ( δ x , δ y , δ u ) to ( x , y , u ) as x y u = Φ xx Φ xy Φ xu Φ y x Φ y y Φ y u Φ ux Φ uy Φ uu δ x δ y δ u , (10) where we hav e Φ xx = ( z I − A − B K C ) − 1 and Φ xy = Φ xx B K , Φ xu = Φ xx B , Φ y x = C Φ xx , Φ y y = C Φ xx B K + I , Φ y u = C Φ xx B , Φ ux = K C Φ xx , Φ uy = K ( C Φ xx B K + I ) , Φ uu = K C Φ xx B + I . (11) W e define the closed-lo op resp onse transfer matrix as Φ := Φ xx Φ xy Φ xu Φ y x Φ y y Φ y u Φ ux Φ uy Φ uu . (12) A notion of external transfer matrix stability is defined as follows. Definition 3 ( [1, Chapter 5]) The close d-lo op system is disturbance-to-signal stable if the close d-lo op r esp onses fr om ( δ x , δ y , δ u ) to ( x , y , u ) ar e al l stable, i.e. , Φ ∈ RH ∞ . 4 3.1 Gener al plant Under Assumption 1, it is known that the in ternal sta- bilit y in Definition 1 and the disturbance-to-signal stability in Definition 2 are equiv alent [1, Chapter 5], i.e. , we hav e C stab = { K | Φ ∈ RH ∞ , with Φ defined in (12) } . (13) In fact, it is sufficien t to enforce a subset of elements in Φ to b e stable, as shown in [1, Lemma 5.3]. Lemma 3 Under Assumption 1, K internally stabilizes G if and only if the close d-lo op r esp onses fr om ( δ y , δ u ) to ( y , u ) ar e stable, i.e. , " Φ y y Φ y u Φ uy Φ uu # ∈ RH ∞ . F or notational simplicity , we denote " δ y δ u # → " y u #! := " Φ y y Φ y u Φ uy Φ uu # . The result in Lemma 3 motiv ates the question of whether w e can select differen t minimal sets of elements in Φ for in ternal stabilit y . F or example, if the closed-lo op resp onses from ( δ x , δ y ) to ( x , y ) are stable, i.e. , " δ x δ y # → " x y #! := " Φ xx Φ xy Φ y x Φ y y # ∈ RH ∞ , can we guarantee that the closed-lo op system is in ternally stable? The answ er is negativ e, as pro v ed in T heorem 1 b elo w. In particular, we consider all p ossible combinations of four closed-loop responses that may guarantee internal sta- bilit y . When choosing tw o disturbances and tw o outputs from (10), we hav e in total 3 2 × 3 2 = 9 choices, i.e. , " δ x δ y # → " x y #! , " δ x δ y # → " y u #! , " δ x δ y # → " x u #! , " δ y δ u # → " x y #! , " δ y δ u # → " y u #! , " δ y δ u # → " x u #! , " δ x δ u # → " x y #! , " δ x δ u # → " y u #! , " δ x δ u # → " x u #! . (14) Note that it is in general not sufficien t to select less than four close-lo op responses since there are t wo dynamical parts in system (1) and con troller (3). One main result of this section sho ws that the stabilit y of an y of the groups of four closed- lo op resp onses in the top-right corner of (14), highlighted in blue, is equiv alent to internal stability . Theorem 1 Consider the L TI system (1) , evolving under a dynamic c ontr ol p olicy (3) . Under Assumption 1, the fol- lowing statements ar e e quivalent: (1) K internal ly stabilizes G ; (2) " δ x δ y # → " y u #! ∈ RH ∞ ; (3) " δ x δ y # → " x u #! ∈ RH ∞ ; (4) " δ y δ u # → " y u #! ∈ RH ∞ ; (5) " δ y δ u # → " x u #! ∈ RH ∞ . Mor e over, the stability of any other gr oup of four close d-lo op r esp onses in (14) is not sufficient for internal stability. Pro of: The idea of our pro of is to use a state-space rep- resen tation of the closed-loop system, whic h is motiv ated b y [1, Lemma 5.3]. F rom (1) and (3), we hav e " x [ t + 1] ξ [ t + 1] # = " A 0 0 A k #" x [ t ] ξ [ t ] # + " B 0 0 B k #" u [ t ] y [ t ] # + " δ x [ t ] 0 # , (15) and " I − D k 0 I # " u [ t ] y [ t ] # = " 0 C k C 0 # " x [ t ] ξ [ t ] # + " δ u [ t ] δ y [ t ] # . (16) Substituting (16) into (15) leads to " x [ t + 1] ξ [ t + 1] # = A cl " x [ t ] ξ [ t ] # + " B B D k 0 B k # " δ u [ t ] δ y [ t ] # + " δ x [ t ] 0 # , i.e. , we hav e " x [ t + 1] ξ [ t + 1] # = A cl " x [ t ] ξ [ t ] # + " I B D k B 0 B k 0 # δ x [ t ] δ y [ t ] δ u [ t ] , x [ t ] y [ t ] u [ t ] = I 0 C 0 D k C C k " x [ t ] ξ [ t ] # + 0 0 0 0 I 0 0 D k I δ x [ t ] δ y [ t ] δ u [ t ] . (17) Therefore, the closed-lo op resp onses from ( δ x , δ y , δ u ) → ( x , y , u ) are I 0 C 0 D k C C k ( z I − A cl ) − 1 " I B D k B 0 B k 0 # + 0 0 0 0 I 0 0 D k I , (18) from whic h, we get state-space realizations of the follo wing 5 closed-lo op resp onses " δ x δ y # → " y u #! = ˆ C 1 ( z I − A cl ) − 1 ˆ B 1 + " 0 I 0 D k # , (19a) " δ x δ y # → " x u #! = ˆ C 2 ( z I − A cl ) − 1 ˆ B 1 + " 0 0 0 D k # , (19b) " δ y δ u # → " y u #! = ˆ C 1 ( z I − A cl ) − 1 ˆ B 2 + " I 0 D k I # , (19c) " δ y δ u # → " x u #! = ˆ C 2 ( z I − A cl ) − 1 ˆ B 2 + " 0 0 D k I # , (19d) where ˆ B 1 = " I B D k 0 B k # , ˆ B 2 = " B D k B B k 0 # , ˆ C 1 = " C 0 D k C C k # , ˆ C 2 = " I 0 D k C C k # . (20) By Lemma 1, we know that K internally stabilizes G if and only if the closed-lo op matrix A cl defined in (5) is stable. It is ob vious true that (1) ⇒ (2), (1) ⇒ (3), (1) ⇒ (4), and (1) ⇒ (5). Next, we prov e if any one of (2) – (5) is true, the ma- trix A cl is stable. According to Lemma 2, it remains to prov e that the state-space realizations (19a)–(19d) are all stabilizable and detectable. This is equiv alen t to sho wing that ( A cl , ˆ B 1 ) , ( A cl , ˆ B 2 ) are stabilizable and that ( A cl , ˆ C 1 ) , ( A cl , ˆ C 2 ) are detectable. W e let ˆ F 1 = " F 0 − C F k # where F and F k are chosen such that A + F and A k + B k F k are stable (since ( A, B k ) is stabilizable). Then, we ha v e that A cl + ˆ B 1 ˆ F 1 = " A + F B C k + B D k F k 0 A k + B k F k # is stable, and thus ( A cl , ˆ B 1 ) is stablizable. Similar argu- men ts show that ( A cl , ˆ B 2 ) is stabilizable, and ( A cl , ˆ C 1 ), ( A cl , ˆ C 2 ) are detectable. F or the second part of Theorem 1, we first pro v e that the stability of " δ x δ y # → " x y #! is not sufficien t for internal stabilit y . F rom (18), a state-space realization of the closed- lo op resp onses from ( δ x , δ y ) to ( x , y ) is " δ x δ y # → " x y #! = " I 0 C 0 # ( z I − A cl ) − 1 ˆ B 1 + " 0 0 0 I # . Since A cl , " I 0 C 0 #! is not detectable in general, the stabil- it y of " δ x δ y # → " x y #! cannot guarantee the stabilit y of A cl . Therefore, it is not sufficient for in ternal stability either. The other claims can be prov ed in a similar w ay: the corre- sp onding state-space realization of the closed-loop transfer matrix is not stabilizable and/or detectable. As shown in Theorem 1, to guarantee in ternal stability for general plants, it is alwa ys required to select δ y as an input and u as an output, leading to four possible groups of closed-lo op resp onses. The groups of closed-lo op resp onses in (14), except those in blue, do not ha ve either δ y or u , and th us fail to guaran tee in ternal stabilit y . Note that The- orem 1 is exclusiv e in the sense that there exist no other com binations of stable closed-lo op resp onses that are equiv- alen t to in ternal stabilit y , and Lemma 3 is included as the equiv alence b etw een 1) and 4) in Theorem 1. Thus, Theo- rem 1 offers a complete picture b etw een in ternal stabilit y and stable closed-lo op resp onses. 3.2 Two sp e cial c ases: Stable plants and State fe e db ack Here, we show that the transfer matrix characterization of in ternal stability can b e simplified for sp ecial cases: 1) op en-lo op stable plants; 2) the state feedback case. T o guar- an tee in ternal stability , instead of considering four closed- lo op responses in Theorem 1, the stabilit y of one particular closed-lo op resp onse is sufficient in the case of op en-lo op stable plants, and the stability of tw o particular closed-lo op resp onses is sufficien t in the state feedback case. The following result is classical, whic h is the same as [1, Corollary 5.5]. F or completeness, w e provide a pro of from a state-space p erspective. Corollary 1 Consider the L TI system (1) , evolving under a dynamic c ontr ol p olicy (3) . If the L TI system is op en- lo op stable (i.e., A is stable), then K ∈ C stab if and only if ( δ y → u ) := Φ uy ∈ RH ∞ . Pro of: The “only if ” direction is true by definition. W e no w prov e the sufficiency . F rom (18), we hav e Φ uy = h D k C C k i ( z I − A cl ) − 1 " B D k B k # + D k . Considering the fact that the following matrix A cl + " B D k B k # h − C F k i = " A B C k + B D k F k 0 A k + B k F k # , is stable when A and A k + B k F k are stable, w e kno w that A cl , " B D k B k #! is stabilizable. Similarly , we can sho w that A cl , h D k C C k i is detectable. Therefore, if Φ uy ∈ RH ∞ , w e hav e A cl is stable, meaning that K ∈ C stab . In the state feedback case, we hav e the following result. Corollary 2 Consider the L TI system (1) , evolving under a dynamic c ontr ol p olicy (3) . If C = I , then K ∈ C stab if and only if δ x → " x u #! := " Φ xx Φ ux # ∈ RH ∞ . 6 Pro of: When C = I , from (18), we hav e " Φ xx Φ ux # = " I 0 D k C k # z I − " A + B D k B C k B k A k #! − 1 " I 0 # , F rom the pro of of Theorem 1, w e know " A + B D k B C k B k A k # , " I 0 D k C k #! is detectable. It is not difficult to prov e that " A + B D k B C k B k A k # , " I 0 #! (21) is stabilizable (see App endix C for details). Therefore, if Φ xx ∈ RH ∞ , Φ ux ∈ RH ∞ , we hav e A cl is stable, meaning that K ∈ C stab . The result in Corollary 2 has b een used in the state feed- bac k case of the system-lev el parametrization [6]. The pro of in [6] used a frequency-based method. Here, w e provided an alternativ e proof from a state-space persp ectiv e, which is consisten t with the pro ofs for Theorem 1 and Corollary 1. 4 P arameterizations of stabilizing con trollers The results in Theorem 1 can b e used to parameterize the set of internally stabilizing con trollers C stab , leading to four equiv alent parameterizations. One of them corresp onds to the SLP [6], and another one is the IOP [7]. The remaining t w o parameterizations are new and, to the b est of the au- thors’ knowledge, hav e not b een c haracterized b efore. The results in Corollaries 1 and 2 can also be used to parame- terize C stab in a simplified wa y . 4.1 F our e quivalent p ar ameterizations for gener al plants The closed-lo op resp onses from ( δ x , δ y ) to ( x , u ) hav e b een utilized in the SLP [6]. Sp ecifically , consider " x u # = " Φ xx Φ xy Φ ux Φ uy # " δ x δ y # . (22) W e hav e the follo wing system-level parameterization (SLP). Prop osition 1 (SLP [6, Theorem 2]) Consider the L TI system (1) , evolving under a dynamic c ontr ol p olicy (3) . The fol lowing statements ar e true: (1) F or any K ∈ C stab , the r esulting close d-lo op r e- sp onses (22) ar e in the fol lowing affine subsp ac e h z I − A − B i " Φ xx Φ xy Φ ux Φ uy # = h I 0 i , " Φ xx Φ xy Φ ux Φ uy # " z I − A − C # = " I 0 # , Φ xx , Φ ux , Φ xy , Φ uy ∈ RH ∞ . (23) (2) F or any tr ansfer matric es Φ xx , Φ ux , Φ xy , Φ uy satisfy- ing (23) , K = Φ uy − Φ ux Φ − 1 xx Φ xy ∈ C stab . W e refer to K = Φ uy − Φ ux Φ − 1 xx Φ xy as the four-block SLP con troller. Also, the closed-loop responses from ( δ y , δ u ) to ( y , u ) hav e b een used in the IOP [7]. Sp ecifically , consider " y u # = " Φ y y Φ y u Φ uy Φ uu # " δ y δ u # . (24) W e hav e the follo wing input-output parameterization (IOP). Prop osition 2 (IOP [7, Theorem 1]) Consider the L TI system (1) , evolving under a dynamic c ontr ol p olicy (3) . The fol lowing statements ar e true: (1) F or any K ∈ C stab , the r esulting close d-lo op r e- sp onses (24) ar e in the fol lowing affine subsp ac e h I − G i " Φ y y Φ y u Φ uy Φ uu # = h I 0 i , " Φ y y Φ y u Φ uy Φ uu # " − G I # = " 0 I # , Φ y y , Φ uy , Φ y u , Φ uu ∈ RH ∞ . (25) (2) F or any tr ansfer matric es Φ y y , Φ uy , Φ y u , Φ uu satisfy- ing (25) , K = Φ uy Φ − 1 y y ∈ C stab . Next, we consider the following closed-lo op resp onses " y u # = " Φ y x Φ y y Φ ux Φ uy # " δ x δ y # . (26) W e hav e a new parametrization of C stab . Prop osition 3 (Mixed I) Consider the L TI system (1) , evolving under a dynamic c ontr ol p olicy (3) . The fol lowing statements ar e true: (1) F or any K ∈ C stab , the r esulting close d-lo op r e- sp onses (26) ar e in the fol lowing affine subsp ac e h I − G i " Φ y x Φ y y Φ ux Φ uy # = h C ( z I − A ) − 1 I i , " Φ y x Φ y y Φ ux Φ uy # " z I − A − C # = 0 , Φ y x , Φ ux , Φ y y , Φ uy ∈ RH ∞ . (27) (2) F or any tr ansfer matric es Φ y x , Φ ux , Φ y y , Φ uy satisfy- ing (27) , K = Φ uy Φ − 1 y y ∈ C stab . The pro of is provided in Appendix A. Finally , w e consider the case " x u # = " Φ xy Φ xu Φ uy Φ uu # " δ y δ u # . (28) The following result mirrors Prop osition 3 for an additional new parametrization of C stab . Prop osition 4 (Mixed II) Consider the L TI system (1) , evolving under a dynamic c ontr ol p olicy (3) . The fol lowing statements ar e true: (1) F or any K ∈ C stab , the r esulting close d-lo op r e- 7 sp onses (28) ar e in the fol lowing affine subsp ac e h z I − A − B i " Φ xy Φ xu Φ uy Φ uu # = 0 , " Φ xy Φ xu Φ uy Φ uu # " − G I # = " ( z I − A ) − 1 B I # , Φ xy , Φ uy , Φ xu , Φ uu ∈ RH ∞ . (29) (2) F or any tr ansfer matric es Φ xy , Φ uy , Φ xu , Φ uu satisfy- ing (29) , K = Φ − 1 uu Φ uy ∈ C stab . The pro of of Prop osition 4 is similar to that of Prop osi- tion 3, which is provided in App endix D for completeness. T o summarize, Prop ositions 1– 4 establish four equiv alent metho ds to parameterize the set of internally stabilizing con trollers using closed-lo op resp onses: C stab = { K = Φ uy − Φ ux Φ − 1 xx Φ xy | Φ xx , Φ ux , Φ xy , Φ uy are in the affine subspace (23) } , C stab = { K = Φ uy Φ − 1 y y | Φ y y , Φ uy , Φ y u , Φ uu are in the affine subspace (25) } , C stab = { K = Φ uy Φ − 1 y y | Φ y x , Φ ux , Φ y y , Φ uy are in the affine subspace (27) } , C stab = { K = Φ − 1 uu Φ uy | Φ xy , Φ uy , Φ xu , Φ uu are in the affine subspace (29) } . Unlik e the state-space characterization (6), the con- strain ts (23), (25), (27), and (29) are all affine in the new parameters. Based on (23), (25), (27), and (29), conv ex optimization problems can b e derived for the classical op- timal con troller syn thesis; see [6, 7, 24] for details. W e will presen t a case study in Section 7. Remark 1 (Equiv alence with Y oula) The explicit e qu- ivalenc e b etwe en Pr op ositions 1 & 2 and the Y oula p ar ame- terization has b e en derive d in [24]. It is not difficult to de- rive the explicit r elationship b etwe en Pr op ositions 3 & 4 and the Y oula p ar ameterization (7) using the appr o ach of [7, 24]. While ther e ar e four p ar ameters in (23) , (25) , (27) , or (29) , ther e is only one fr e e dom due to the affine c onstr aints. This is c onsistent with the Y oula p ar ameterization, wher e only one p ar ameter is involve d with no explicit affine c onstr aints. In Pr op osition 6, we wil l show that any doubly-c oprime fac- torization of the plant c an exactly eliminate the affine c on- str aints (23) , (25) , (27) , and (29) . Remark 2 (Numerical computation) We note that while b eing c onvex, the de cision variables in (23) , (25) , (27) , and (29) ar e infinite-dimensional. Thus, finite-dimensional appr oximations ar e usual ly ne e de d for numeric al c omputa- tions, which wil l b e discusse d in Se ction 5. However, the affine c onstr aints (23) , (25) , (27) , and (29) c an never b e exactly satisfie d in numeric al c omputation. Se ction 6 wil l formal ly discuss the issue of numeric al r obustness. 4.2 Two sp e cial c ases: stable plants and state fe e db ack The results in Corollaries 1 and 2 can b e exploited to deriv e simplified versions of Propositions 1–4. W e will later sho w that these simplified parametrizations enjoy pro v able n umerical robustness. When the plant is op en-loop stable, the IOP (Prop osition 2) and the Mixed I (Proposition 3) are simplified as follows. Corollary 3 Consider the L TI system (1) , evolving under a dynamic c ontr ol ler p olicy (3) . If the L TI system is op en- lo op stable, then we have C stab = ( K = Φ uy Φ − 1 y y h I − G i " Φ y y Φ uy # = I , Φ uy ∈ RH ∞ ) . This result is consistent with the classical one in [1, Theo- rem 12.7]. Note that for open-lo op stable plan ts, the trans- fer matrix Φ uy from the measuremen t disturbance δ y to the control input u is the same as the Y oula parameter Q . Under the condition in Corollary 3, the Mixed I I (Prop osi- tion 4) can b e simplified as well: C stab = ( K = Φ − 1 uu Φ uy h Φ uy Φ uu i " − G I # = I , Φ uy ∈ RH ∞ ) . If the state is directly measurable for con trol, i.e. , C = I , Corollary 2 leads to the following simplified v ersion of SLP . Corollary 4 ( [6, Theorem 1]) Consider the L TI sys- tem (1) , evolving under a dynamic c ontr ol ler p olicy (3) . If C = I , then we have C stab = K = Φ ux Φ − 1 xx | ( z I − A ) Φ xx − B Φ ux = I , Φ ux , Φ xx ∈ 1 z RH ∞ . Note that the simplified IOP/Mixed I/Mixed I I requires the stability of only one parameter, while the simplified SLP requires the stability of tw o parameters. The pro ofs for Corollaries 3 and 4 are similar to that of Prop osition 3. 5 Numerical computation and controller imple- men tation This section inv estigates the n umerical computation and con troller implementation using the closed-lo op parameter- ization for C stab . As noted in Remark 2, since the decision v ariables in the affine constraints (23), (25), (27), and (29) are infinite-dimensional, it is not immediately obvious to deriv e efficient n umerical computation to searc h ov er the feasible region. One practical metho d is to apply the fi- nite impulse resp onse (FIR) appro ximation, whic h is exten- siv ely used in [6, 7]. As w e will see, the SLP , the IOP and the tw o new mixed parametrizations are not equiv alent to eac h other after imp osing FIR constraints. In this section, w e also presen t standard state-space realizations (3) for the con trollers using closed-lo op resp onses. 5.1 Numeric al c omputation via FIR W e denote the space of finite impulse resp onse (FIR) transfer matrices with horizon T as F T := ( H ∈ RH ∞ H = T X k =0 1 z k H k ) , 8 where H k denotes the i -th sp ectral comp onent of the FIR transfer matrix H . It is known that on letting the FIR length T go to infinity , F T con v erges to the space RH ∞ [28, The- orem 4.7]. It is not difficult to chec k that after imp osing the decision v ariables to b e FIR transfer matrices of hori- zon T , the constraints (23), (25), (27), and (29) all b ecome finite-dimensional affine constrain ts in terms of the sp ec- tral comp onents of the closed-lo op responses. Sp ecifically , the constraints are obtained by matching the co efficien ts asso ciated with the terms z − k . Thus, searching for an in- ternally stabilizing controller only requires solving a linear program (LP) under the FIR assumption 2 . Here, we sho w that imp osing the FIR assumption has differen t effects dep ending on the chosen closed-lo op parametrization. Theorem 2 Given the L TI system (1) , evolving under a dynamic c ontr ol p olicy (3) , we c onsider the statements: (i) Φ ∈ F T ; (ii) " δ x δ y # → " x u #! ∈ F T ; (SLP) (iii) " δ x δ y # → " y u #! ∈ F T ; (Mixe d I) (iv) " δ y δ u # → " x u #! ∈ F T ; (Mixe d II) (v) " δ y δ u # → " y u #! ∈ F T . (IOP) If ( A, B , C ) and ( A k , B k , C k ) ar e b oth stabilizable and de- te ctable, we have ( i ) ⇔ ( ii ) ⇒ ( iii ) ⇒ ( v ) and ( i ) ⇔ ( ii ) ⇒ ( iv ) ⇒ ( v ) . In addition, if ( A, B , C ) and ( A k , B k , C k ) ar e b oth c ontr ol lable and observable, we have ( i ) ⇔ ( ii ) ⇔ ( iii ) ⇔ ( iv ) ⇔ ( v ) . The pro of is not mathematically inv olved, and w e provide it in App endix B. Note that minimal state-space realiza- tions of the plant and the controller deserve more in vestiga- tions in distributed con trol when particular structures are required; see [29, 30] for details. Up on defining the following sets C SLP = { K = Φ uy − Φ ux Φ − 1 xx Φ xy | Φ xx , Φ ux , Φ xy , Φ uy ∈ F T are in the affine subspace (23) } , C M1 = { K = Φ uy Φ − 1 y y | Φ y x , Φ y y , Φ ux , Φ uy ∈ F T are in the affine subspace (27) } , C M2 = { K = Φ − 1 uu Φ uy | Φ xy , Φ uy , Φ xu , Φ uu ∈ F T are in the affine subspace (29) } , C IOP = { K = Φ uy Φ − 1 y y | Φ y y , Φ uy , Φ y u , Φ uu ∈ F T are in the affine subspace (25) } , it is easy to deriv e the following corollary . Corollary 5 If ( A, B , C ) and ( A k , B k , C k ) ar e b oth stabi- 2 Dep ending on the choice of the cost function, optimal con- troller synthesis may be cast as a quadratic program (QP) under the FIR assumption; see a case study in Section 7. C SLP C M1 C M2 C IOP C stab Figure 2. The IOP pro vides the best inner approximation of C stab using F IR approximations: C SLP ⊂ C M1 ⊂ C IOP ⊂ C stab , and C SLP ⊂ C M2 ⊂ C IOP ⊂ C stab . lizable and dete ctable, we have C SLP ⊂ C M1 ⊂ C IOP ⊂ C stab and C SLP ⊂ C M2 ⊂ C IOP ⊂ C stab . If ( A, B , C ) and ( A k , B k , C k ) ar e b oth c ontr ol lable and observable, we have C SLP = C M1 = C M2 = C IOP ⊂ C stab . Theoretically , the closed-lo op parameterizations in Prop ositions 1-4 are equiv alen t to eac h other. Ho wev er, after imp osing the FIR appro ximation on the decision v ari- ables, Corollary 5 sho ws that the IOP [7] in Prop osition 2 has the b est ability to appro ximate the set of stabilizing con trollers C stab , as it exclusiv ely deals with the maps from inputs to outputs without passing through the system state; see Figure 2 for illustration. Precisely , when there are some stable uncon trollable and/or unobserv able mo des in (1), these mo des cannot b e c hanged by any feedback con troller and will be reflected in the closed-loop resp onses in v olving the state x . Therefore, for systems with stable uncon trollable and/or unobserv able modes, the parameters in the SLP [6], or the new parameterization in Prop osi- tion 3/4 (Mixed I/I I), cannot be made FIR by definition, since these parameterizations in v olv e the state x and/or the disturbance on the state δ x explicitly . F or example, consider an L TI system (1) with matrices as A = " 0 . 5 0 0 1 # , B = " 0 1 # , C = h 0 1 i . There is one uncontrollable and unobserv able mo de z = 0 . 5, and this mo de is stable. The affine constraints (23), (27), (29) are all infeasible for an y FIR approximation with finite horizon T since the mo de z = 0 . 5 cannot be repre- sen ted b y FIR exactly , while the IOP in Proposition 2 is feasible as long as the horizon T ≥ 1. Remark 3 Note that if ther e ar e some stable unc ontr ol- lable and/or unobservable mo des in (1) , one may p erform a mo del r e duction to get an e quivalent state-sp ac e r e alization that is c ontr ol lable and observable. Then, al l the close d-lo op p ar ameterizations in Pr op ositions 1-4 have the same ability for appr oximating C stab when imp osing the FIR assumption. We note that mo del r e duction gener al ly destr oys the underly- ing sp arsity structur e in the original system (1) , which may b e unfavour able for distribute d c ontr ol ler synthesis [31]. 9 5.2 Contr ol ler implementation via state-sp ac e r e alization In Prop ositions 1–4, to get the controller K , w e need to compute the inv erse of some transfer matrix as well as the pro duct of transfer matrices. F or the SLP in [6], the au- thors prop osed the following implemen tation of the con- troller K = Φ uy − Φ ux Φ − 1 xx Φ xy from the system resp onses matrices Φ xx , Φ xy , Φ ux , Φ uy : z β = z ( I − z Φ xx ) β − z Φ xy y , u = z Φ ux β + Φ uy y . (30) The implemen tation (30) av oids the explicit computation of matrix inv erse and matrix pro duct. W e note that a few other realizations hav e b een discussed in [29, 32]. Ho wev er, the controller matrices in (30) still contain transfer matri- ces. Motiv ated by [26], this subsection provides a standard state-space realization (3) for the controller in closed-lo op parameterizations after imp osing the FIR approximation. W e consider the controller K = Φ uy Φ − 1 y y in Prop osition 2 and 3 (IOP and Mixed I). W e assume that the system re- sp onse Φ uy and Φ y y are FIR with horizon T , i.e. , Φ uy = T X t =0 U t 1 z t ∈ RH ∞ , Φ y y = T X t =0 Y t 1 z t ∈ RH ∞ . (31) Up on defining the following real matrices ˆ U = h U 1 U 2 . . . U T i ∈ R m × pT , ˆ Y = h Y 1 Y 2 . . . Y T i ∈ R p × pT , (32) and Z p ∈ R pT × pT as the down shift op erator with sub- diagonal containing identit y matrices of dimension p × p and I p = [ I p , 0 , . . . , 0] T ∈ R pT × p , w e hav e the following result. Theorem 3 Supp ose that Φ uy and Φ y y ar e FIR tr ansfer matric es with horizon T in (31) . A state-sp ac e r e alization for the output fe e db ack c ontr ol ler K = Φ uy Φ − 1 y y is given by K = Z p − I p ˆ Y −I p U 0 ˆ Y − ˆ U U 0 . (33) A state-space realization for the controller K = Φ − 1 uu Φ uy in Prop osition 4 (Mixed II) can b e developed similarly . The pro of of Theorem 3 is motiv ated by [26], and is based on some standard op erations on dynamical sys- tems (see, e.g., [1, Chapter 3.6]). W e pro vide the pro ofs in App endix F for completeness. In App endix F, we also pro vide a state-space realization for the SLP controller K = Φ uy − Φ ux Φ − 1 xx Φ xy . Finally , we note that the state- space realization in (33) is in general not minimal. 6 Numerical robustness of closed-loop parameter- izations The previous sections highligh ted the benefits of closed- lo op parameterizations: the set of internally stabilizing con- trollers can b e fully characterized by a set of affine con- strain ts on certain closed-lo op responses, leading to finite- dimensional conv ex optimization problems for con troller syn thesis after imp osing the FIR constrain ts. How ever, n u- merical solutions computed via arbitrarily precise floating p oin t arithmetic can never solv e the affine constraints ex- actly . This phenomenon is further exacerbated b y the finite stopping criteria used in common solvers, lik e SeDuMi [33] and Mosek [34]. Moreov er, an y con troller implemen tation that uses floating-p oin t arithmetic also introduce errors. Therefore, numerical mismatches in solving the affine con- strain ts in Prop ositions 1–4 alw ays exist. This section in vestigates how the n umerical mismatc hes in the affine constraints affect the stability of the closed- lo op system, a prop ert y termed as numeric al r obustness of closed-lo op parameterizations. An o verview of the results in this section is presen ted in T able 1. 6.1 R obustness r esults for the IOP and the SLP W e b egin with the IOP in Prop osition 2. The transfer ma- trices ˆ Φ y y , ˆ Φ uy , ˆ Φ y u , ˆ Φ uu only approximately satisfy the affine constraint (25), i.e. , we hav e h I − G i " ˆ Φ y y ˆ Φ y u ˆ Φ uy ˆ Φ uu # = h I + ∆ 1 ∆ 2 i , " ˆ Φ y y ˆ Φ y u ˆ Φ uy ˆ Φ uu # " − G I # = " ∆ 3 I + ∆ 4 # , ˆ Φ y y , ˆ Φ uy , ˆ Φ y u , ˆ Φ uu ∈ RH ∞ , (34) where the residuals are ∆ 1 = ˆ Φ y y − G ˆ Φ uy − I , ∆ 2 = ˆ Φ y u − G ˆ Φ uu , ∆ 3 = − ˆ Φ y y G + ˆ Φ y u , ∆ 4 = − ˆ Φ uy G + ˆ Φ uu − I . Remark 4 We note that the r esiduals ∆ i ( i = 1 , . . . , 4) c an c ome fr om 1) numeric al c omputation when enfor cing the e quality c onstr aints numeric al ly, and 2) the c ontr ol ler implementation that uses flo ating-p oint arithmetic. We use ∆ i ( i = 1 , . . . , 4) to denote such mismatches fr om the e qual- ity c onstr aints. The r esults in this se ction work r e gar d less of the phenomenon gener ating ∆ i ( i = 1 , . . . , 4) . Theorem 4 L et ˆ Φ y y , ˆ Φ uy , ˆ Φ y u , ˆ Φ uu satisfy (34) . Then, we have the fol lowing statements. (1) In the c ase of G ∈ RH ∞ , the c ontr ol ler K = ˆ Φ uy ˆ Φ − 1 y y internal ly stabilizes the plant G if and only if ( I + ∆ 1 ) − 1 is stable. (2) In the c ase of G / ∈ RH ∞ , the c ontr ol ler K = ˆ Φ uy ˆ Φ − 1 y y fails to internal ly stabilize the close d-lo op system due to non-zer o r esiduals ∆ i . Pro of: Given a con troller K , the closed-lo op responses from ( δ y , δ u ) to ( y , u ) are " y u # = " ( I − GK ) − 1 ( I − GK ) − 1 G K ( I − GK ) − 1 I + K ( I − GK ) − 1 G # " δ y δ u # . Considering K = ˆ Φ uy ˆ Φ − 1 y y , where ˆ Φ y y , ˆ Φ uy , ˆ Φ y u , ˆ Φ uu sat- isfy (34), we can verify the following iden tities: ( I − GK ) − 1 = ( I − G ˆ Φ uy ˆ Φ − 1 y y ) − 1 = ˆ Φ y y ( I + ∆ 1 ) − 1 , ( I − GK ) − 1 G = ˆ Φ y y ( I + ∆ 1 ) − 1 G , K ( I − GK ) − 1 = ˆ Φ uy ( I + ∆ 1 ) − 1 , (35) 10 T able 1 Comparison of numerical robustness among different closed-loop parameterizations Coprime factorization Equalit y constrain ts Con troller reco v ery K Op en-lo op stable plants Op en-lo op unstable plants Pre-stabilizing the plant 2 SLP [6] No Y es Φ uy − Φ ux Φ − 1 xx Φ xy ∗ ∗ ∗ Φ uy ( I + C Φ xy ) − 1 X 7 X Φ ux Φ − 1 xx (when C = I ) 1 X X X IOP [7] No Y es Φ uy Φ − 1 uy X 7 X Mixed I No Y es Φ uy Φ − 1 uy X 7 X Mixed I I No Y es Φ − 1 uu Φ uy X 7 X Y oula [4] Y es No (7) X X X 1 : This only works for the state feedbac k case, i.e. , C = I . 2 : This applies an initial stabilizing controller that is stable itself (see Proposition 5). ∗ : The situation requires care-by-case analysis; see Theorem 5 and Section 6.2 for details. X : The parameterization is numerically robust (see Corollary 6). 7 : The parameterization cannot guarantee the closed-loop stability if small numerical mismatc hes in the equality constrain ts exist. and I + K ( I − GK ) − 1 G = I + ˆ Φ uy ( I + ∆ 1 ) − 1 G . Pr o of of Statement 1: Supp ose that G ∈ RH ∞ . If ( I + ∆ 1 ) − 1 is stable, it is easy to verify that all transfer matrices in (35) are stable. This means that " δ y δ u # → " y u #! ∈ RH ∞ . By Theorem 1, w e know K = ˆ Φ uy ˆ Φ − 1 y y in ternally stabilizes the plan t G . If ( I + ∆ 1 ) − 1 is unstable, then the closed-lo op resp onse from δ y to y will be unstable in general, and thus the controller do es not internally stabilize the system. Pr o of of Statement 2: If G is unstable, the transfer ma- trices in (35) cannot b e guaranteed to b e stable if ∆ 1 6 = 0. When ∆ 1 = 0, we hav e ( I − GK ) − 1 G = ˆ Φ y y G = ˆ Φ y u − ∆ 3 and I + K ( I − GK ) − 1 G = I + ˆ Φ uy G = ˆ Φ uu − ∆ 4 . Note that the residuals ∆ 3 , ∆ 4 in (34) can be unstable if G is unstable (since the product of an unstable transfer matrix and a stable one can b e unstable). Th us, the controller fails to guarantee the in ternal stability of the closed-lo op system unless ∆ 1 = 0 , ∆ 2 = 0 , ∆ 3 = 0 , ∆ 4 = 0. W e now fo cus on the SLP in Prop osition 1. The trans- fer matrices ˆ Φ xx , ˆ Φ ux , ˆ Φ xy , ˆ Φ uy only appro ximately satisfy the affine constraint (23), i.e. , we hav e h z I − A − B i " ˆ Φ xx ˆ Φ xy ˆ Φ ux ˆ Φ uy # = h I + ˆ ∆ 1 ˆ ∆ 2 i , " ˆ Φ xx ˆ Φ xy ˆ Φ ux ˆ Φ uy # " z I − A − C # = " I + ˆ ∆ 3 ˆ ∆ 4 # , ˆ Φ xx , ˆ Φ ux , ˆ Φ xy , ˆ Φ uy ∈ RH ∞ , (36) where the residuals are ˆ ∆ 1 = ( z I − A ) ˆ Φ xx − B ˆ Φ ux − I , and ˆ ∆ 2 = ( z I − A ) ˆ Φ xy − B ˆ Φ uy , ˆ ∆ 3 = ˆ Φ xx ( z I − A ) − ˆ Φ xy C − I ˆ ∆ 4 = ˆ Φ ux ( z I − A ) − ˆ Φ uy C. Note that there are m ultiple wa ys to recov er the con troller K in the SLP framework. The SLP controller can also b e reco v ered in another wa y as K = ˆ Φ uy ( I + C ˆ Φ xy ) − 1 [6]. No w, we hav e the following result. Theorem 5 L et ˆ Φ xx , ˆ Φ ux , ˆ Φ xy , ˆ Φ uy satisfy (36) . We have the fol lowing statements. (1) In the state fe e db ack c ase, i.e., C = I , the c ontr ol ler K = ˆ Φ ux ˆ Φ − 1 xx internal ly stabilizes the plant G if and only if ( I + ˆ ∆ 1 ) − 1 is stable. (2) The four-blo ck SLP c ontr ol ler K = ˆ Φ uy − ˆ Φ ux ˆ Φ − 1 xx ˆ Φ xy c annot guar ante e the internal stability of the close d- lo op system if ( I + ˆ ∆ ) − 1 is unstable, wher e 3 ˆ ∆ := ˆ ∆ 3 + ˆ Φ xx ( I + ˆ ∆ 1 ) − 1 B ˆ ∆ 4 − ( z I − A ) ˆ ∆ 3 . (37) (3) F or the c ontr ol ler K = ˆ Φ uy ( I + C ˆ Φ xy ) − 1 , a) if G ∈ RH ∞ , K internal ly stabilizes the plant G if and only if ( I + C ( z I − A ) − 1 ˆ ∆ 2 ) − 1 is stable. b) if G / ∈ RH ∞ , K fails to internal ly stabilizes the close d-lo op system due to non-zer o r esiduals ˆ ∆ i , i = 1 , . . . , 4 . Pro of: The pro of of Statement 1 is presented in [25, Theorem 4.3]. W e prov e the second statemen t here. Given ˆ Φ xx , ˆ Φ ux , ˆ Φ xy , ˆ Φ uy satisfying (36) and the controller K = ˆ Φ uy − ˆ Φ ux ˆ Φ − 1 xx ˆ Φ xy , w e consider the closed-lo op response from δ x to x . After some tedious algebra (see App endix G), w e derive ( z I − A − B K C ) − 1 = ( I + ˆ ∆ ) − 1 ˆ Φ xx ( I + ˆ ∆ 1 ) − 1 , (38) with ˆ ∆ defined in (37). If ( I + ˆ ∆ ) − 1 is unstable, there is no guarantee that the closed-loop resp onse from δ x to x is stable. In this case, the controller K = ˆ Φ uy − ˆ Φ ux ˆ Φ − 1 xx ˆ Φ xy cannot internally stabilize the plant. F or Statement 3, considering Corollary 1, w e only need to chec k the closed-lo op response from δ y to u , which is K ( I − GK ) − 1 = ˆ Φ uy ( I + C ˆ Φ xy ) − 1 ( I − G ˆ Φ uy ( I + C ˆ Φ xy ) − 1 ) − 1 = ˆ Φ uy ( I + C ˆ Φ xy − C ( z I − A ) − 1 B ˆ Φ uy ) − 1 = ˆ Φ uy ( I + C ( z I − A ) − 1 ˆ ∆ 2 ) − 1 . 3 Note that because k ˆ ∆ k ∞ ma y large than 1, there is no guar- an tee that ( I + ˆ ∆ ) − 1 is alwa ys stable. See Example (39). 11 The rest of the proof is similar to Theorem 4. Theorem 5 quantifies the numerical robustness of differ- en t controller recov ery in the SLP due to the mismatches of the associated equality constraints. The mismatches come from floating-p oint arithmetic in either n umerical compu- tation or controller implementation. This is irresp ective of whether the FIR approximation is used for the closed-lo op resp onses. Similar robustness results can b e deriv ed for the Mixed I/II parameterizations (Prop ositions 3/4); see Ap- p endix H. Theorems 4 and 5 can now b e com bined with the small gain theorem [1, Theorem 9.1] to provide simple sufficien t conditions for numerical robustness. Corollary 6 L et ˆ Φ y y , ˆ Φ uy , ˆ Φ y u , ˆ Φ uu satisfy (34) . Then – for op en-lo op stable plants, the IOP c ontr ol ler K = ˆ Φ uy ˆ Φ − 1 y y internal ly stabilizes the plant if k ∆ 1 k ∞ < 1 . L et ˆ Φ xx , ˆ Φ ux , ˆ Φ xy , ˆ Φ uy satisfy (36) . Then – for the state fe e db ack c ase, the SLP c ontr ol ler K = ˆ Φ ux ˆ Φ − 1 xx internal ly stabilizes the plant if k ˆ ∆ 1 k ∞ < 1 . – for op en-lo op stable plants, the SLP c ontr ol ler K = ˆ Φ uy ( I + C ˆ Φ xy ) − 1 internal ly stabilizes the plant if k ˆ ∆ 2 k ∞ ≤ 1 k C ( z I − A ) k ∞ . The sufficien t condition for robustness of the SLP state feedbac k case first appeared in [35], which is one k ey result in the recent learning-based control applications [15, 16]. Remark 5 The c ontr ol ler r e c overy in IOP/Mixe d I/II, the two-blo ck state-fe e db ack SLP c ontr ol ler, and the SLP c on- tr ol ler K = ˆ Φ uy ( I + C ˆ Φ xy ) − 1 only involve two p ar ame- ters explicitly. Thus, their r obustness analysis is str aight- forwar d. The c orr esp onding analysis for the four-blo ck SLP c ontr ol ler K = ˆ Φ uy − ˆ Φ ux ˆ Φ − 1 xx ˆ Φ xy , inste ad, do es not pr o- vide a numeric al r obustness r esult. As shown in The or em 5, the r esiduals ˆ ∆ i , i = 1 , . . . , 4 play a mor e c omplex r ole in the r esulting close d-lo op r esp onses, irr esp e ctive of state- or output-fe e db ack, or op en-lo op stability of the plant. Sinc e the close d-lo op r esp onses fr om δ x , δ y , δ u to x , y , u c an b e c om- pute d using these r esiduals ˆ ∆ i , one may find sophistic ate d sufficient c onditions on the r esiduals ˆ ∆ i to ensur e the in- ternal ly stability of the close d-lo op system. These c onditions might r elate these r esiduals with numeric al solutions such as ˆ Φ xx . Deriving such c onditions and finding tr actable ways to enfor c e these c onditions ar e b eyond the sc op e of this p ap er and left as futur e work. 6.2 Implic ations in numeric al c omputation and c ontr ol ler implementation Here, we discuss the implication of Theorems 4, 5 and Corollary 6. In practice, the residuals ∆ 1 = ˆ Φ y y − G ˆ Φ uy − I (when G is stable) and ˆ ∆ 1 = ( z I − A ) ˆ Φ xx − B ˆ Φ xy − I are v ery small numerically . It is fairly safe to say that k ∆ 1 k ∞ < 1 and k ˆ ∆ 1 k ∞ < 1 in floating-p oint implemen tation and n umerical computation using any common interior-point solv ers, suc h as SeDuMi [33] and Mosek [34]. Similar state- men ts are true for the Mixed I/II parameterizations. This observ ation leads to the follo wing summary (see T able 1 for an ov erview). Numerical Robustness . Consider close d-lo op p ar ameter- izations (SLP, IOP, Mixe d I/II) in numeric al c omputation. We have (i) the SLP with c ontr ol ler K = ˆ Φ ux ˆ Φ − 1 xx is numeric al ly r obust in the state fe e db ack c ase; (ii) the IOP, Mixe d I/II, and SLP with c ontr ol ler ˆ Φ uy ( I + C ˆ Φ xy ) − 1 ar e numeric al ly r obust for op en-lo op stable plants. On the other hand, we have (I) the IOP, Mixe d I/II, and SLP with c ontr ol ler ˆ Φ uy ( I + C ˆ Φ xy ) − 1 ar e not numeric al ly r obust for op en-lo op un- stable plants, irr esp e ctive of having state- or output- fe e db ack; (II) the SLP with c ontr ol ler K = ˆ Φ uy − ˆ Φ ux ˆ Φ − 1 xx ˆ Φ xy is not numeric al ly r obust in gener al, irr esp e ctive of op en-lo op stability of the plant. The statemen ts (i), (ii) and (I) are easy to see from the previous section. The statemen t (I I) comes form Theorem 5 but requires more atten tion. Although the computational residuals ˆ ∆ 1 , ˆ ∆ 2 , ˆ ∆ 3 , ˆ ∆ 4 in (36) are typically very small elemen t-wise by interior-point solvers, we still cannot guar- an tee that k ˆ ∆ k ∞ < 1 (where ˆ ∆ is defined in (37)), since ˆ ∆ in volv es ˆ Φ xx explicitly . Consequen tly , it is p ossible that ( I + ˆ ∆ ) − 1 is unstable in numerical computation. There- fore, one ma y argue that the four-blo ck SLP controller K = ˆ Φ uy − ˆ Φ ux ˆ Φ − 1 xx ˆ Φ xy is not n umerically robust in gen- eral 4 . F urther, w e notice that the controller implemen ta- tion (30) prop osed in [6] also suffers the issue of numeri- cal instabilit y , as the righ t-hand-side of (38) represen ts the corresp onding closed-lo op resp onse using (30). Example 1 T o understand the r ole of the r esiduals, we pr esent a simple example. Consider a stable L TI system (1) with A = 0 , B = 1 , C = 1 . It c an b e verifie d that the fol lowing tr ansfer functions ˆ Φ xx = 1 z + ( z − 5)( z + 6) 2 z 5 , ˆ Φ ux = ( z − 5)( z + 6) 2 z 4 , ˆ Φ xy = ( z − 5)( z + 6) 2 z 4 − 1 1000 ( z + 2) 2 z 3 , ˆ Φ uy = ( z − 5)( z + 6) 2 z 3 , (39) satisfy (36) with r esiduals ˆ ∆ 1 = 0 , ˆ ∆ 2 = − ( z + 2) 2 1000 z 2 , ˆ ∆ 3 = ( z + 2) 2 1000 z 3 , ˆ ∆ 4 = 0 . F or this example, we verify that ( I + ˆ ∆ ) − 1 has a p air of un- stable p oles z = 0 . 9522 ± 0 . 5226 i , despite the norm k ˆ ∆ 3 k ∞ = 9 × 10 − 3 b eing very smal l, and that this p air of unstable p oles also app e ars in the close d-lo op system ( z I − A − B K C ) − 1 using the c ontr ol ler K = ˆ Φ uy − ˆ Φ ux ˆ Φ − 1 xx ˆ Φ xy . This exam- ple is op en-lo op stable and it is also in state fe e db ack form. 4 As discussed in Remark 5, sufficien t conditions could exist to ensure internal stability , and they will depend on ˆ Φ xx . 12 - K G y u ⇒ - - K 0 G y u u 0 u 1 K 1 - e 6 + + ˆ G ⇒ - K 1 ˆ G y u 1 Figure 3. Giv en an initial con troller K 0 ∈ C stab ∩ RH ∞ , w e searc h for K 1 to stabilize the new stable plan t ˆ G := ( I − GK 0 ) − 1 G . Nonetheless, a smal l r esidual c an destabilize the close d-lo op using the four-blo ck SLP c ontr ol ler. W e remark that in Example 1, since A = 0, the op- timal LQR controller will b e K = 0 for any weigh t ma- trices Q and R . Thus, any sensible formulation of opti- mal con trol problems using the SLP will not lead to the highly sub optimal solution (39). How ever, we emphasize that the numerical residuals play a complex role in the closed-lo op system using the four-blo ck SLP controller, and residuals with a small norm may lead to an undesirable destabilization situation. Indeed, n umerical instability is tigh tly link ed to the sp ecific con troller recov ery . Unlike the four-blo c k SLP con troller, from Corollary 6, the state feed- bac k SLP controller K = ˆ Φ ux ˆ Φ − 1 xx is n umerically robust as long as k ˆ ∆ 1 k ∞ < 1. Since ˆ ∆ 1 = 0 in Example 1, the closed-lo op system ( z I − A − B K C ) − 1 has all zero eigen- v alues using K = ˆ Φ ux ˆ Φ − 1 xx . Meanwhile, we can v erify that k C ( z I − A ) − 1 ˆ ∆ 2 k ∞ = 0 . 009 < 1, thus it is guaranteed that the con troller K = ˆ Φ uy ( I + C ˆ Φ xy ) − 1 in ternally stabilizes the plant (the largest norm of the closed-lo op eigen v alues is 0.1675). The question remains whether the phenomenon high- ligh ted in Example 1 may lead to n umerical instability when solving optimal control formulation in practice. W e observ ed several cases where the four-blo ck SLP controller failed to stabilize the plan t ev en using the default setting (high precision) in Mosek [34] for numerical computation 5 . This is likely due to k ˆ Φ xx k ∞ b eing high, despite solving an optimal control form ulation. How to a v oid this issue re- quires more inv estigations, which is left for future work. 6.3 Op en-lo op unstable plants and r elation with the Y oula p ar ameterization T o c haracterize the set of internally stabilizing con trollers C stab , the closed-lo op parameterizations in Prop osition 1– 4 can av oid computing the doubly co-prime factorization of the plant a priori , but they all need to imp ose a set of affine constrain ts for achiev able closed-lo op resp onses. As discussed ab o v e, any small mismatc h in the additional affine constraints can mak e the resulting controller un- implemen table when the plant is op en-lo op unstable (IOP , Mixed I/II), and the four-blo ck SLP controller requires a case-b y-case inv estigation. 5 See the examples at https://github.com/zhengy09/h2_clp , where the system matrices A ∈ R 3 × 3 , B ∈ R 3 × 1 , C ∈ R 1 × 3 ha v e in teger elements randomly generated from − 5 to 5, and the w eigh t matrices are chosen Q = I , R = I in (8). F or the case of op en-lo op unstable plan ts, there exists a v alid remedy by pre-stabilizing the plant. Supp ose that G is unstable, and that a stable and stabilizing controller K 0 is known a priori . W e can split the control signal as u = K 0 y + u 1 , and design u 1 . This is equiv alent to applying the closed-lo op parameterization to the new stable plan t ˆ G := ( I − GK 0 ) − 1 G (see Figure 3 for illustration). Up on defining ˆ C stab := { K 0 + K 1 | K 1 in ternally stabilizes ˆ G } , w e hav e the following result. Prop osition 5 Given an initial c ontr ol ler K 0 ∈ C stab ∩ RH ∞ , we have C stab = ˆ C stab . The pro of is based on algebra verification; see App endix I. Prop osition 5 shows that searc hing ov er ˆ C stab has no conser- v atism. The new plant ˆ G = ( I − GK 0 ) − 1 G is stable, and th us any closed-lo op parameterization in Prop ositions 1–4 for this plant has goo d numerical robustness 6 . As shown in [9, Theorem 17], giving K 0 ∈ C stab ∩ RH ∞ , the Y oula parameterization (7) has a simple form as well, since one can choose an explicit doubly-coprime factorization as M l = ( I − GK 0 ) − 1 , M r = − ( I − K 0 G ) − 1 N l = G ( I − K 0 G ) − 1 , N r = − G ( I − K 0 G ) − 1 , U l = − I , V l = − K 0 , U r = I , V r = K 0 . If the plant is op en-lo op stable, we can choose K 0 = 0. Unlik e the closed-lo op parameterizations in Prop osi- tions 1–4, the Y oula parameterization (7) allo ws the pa- rameter Q to b e freely c hosen in RH ∞ with no equality constrain ts. Indeed, any doubly-coprime factorization of the plant can b e used to eliminate the affine constraints in Prop ositions 1–4 exactly , as shown b elow. Prop osition 6 L et U r , V r , U l , V l , M r , M l , N r , N l b e any doubly-c oprime factorization of G . F or any Q ∈ RH ∞ , the fol lowing tr ansfer matric es Φ y y = ( U r − N r Q ) M l , Φ uy = ( V r − M r Q ) M l , Φ y u = ( U r − N r Q ) N l , Φ uu = I + ( V r − M r Q ) N l , (40) and Φ xx = ( z I − A ) − 1 + ( z I − A ) − 1 B Φ uy C ( z I − A ) − 1 , 6 F or the SLP , we use the con troller K = ˆ Φ uy ( I + C ˆ Φ xy ) − 1 . 13 Φ ux = Φ uy C ( z I − A ) − 1 , Φ xy = ( z I − A ) − 1 B Φ uy , Φ xu = ( z I − A ) − 1 B Φ uu , Φ y x = Φ uu C ( z I − A ) − 1 , (41) satisfy the affine c onstr aints (23) , (25) , (27) , (29) . The pro of is based on direct verification, which is omit- ted here; see [24] for further discussions on the equiv alence of the Y oula parameterization, the IOP , and the SLP . W e note that a doubly-coprime factorization can b e found in the state-space domain [27], and this pre-pro cess might in- tro duce numerical issues that affect closed-lo op stability , whic h is b eyond the scop e of this pap er. 7 Case studies In this section, w e presen t a case study of optimal con- troller syn thesis for op en-lo op stable plants using Prop osi- tions 1-4. W e show that the optimal controller synthesis problem can be cast into a quadratic program (QP) after imp osing the FIR constraint. 7 7.1 Applic ation to optimal c ontr ol ler synthesis Consider the optimal controller synthesis (9). Using a c hange of v ariables, as suggested in Propositions 1-4, it is equiv alent to replace K ∈ C stab with the affine con- strain ts (23), (25), (27), or (29). It remains to reformulate the cost function in terms of these new v ariables. Simple algebra shows that ( I − GK ) − 1 = Φ y y = C Φ xy + I , K ( I − GK ) − 1 = Φ uy , ( I − K G ) − 1 = Φ uu = Φ ux B + I , and ( I − GK ) − 1 G = Φ y u = C Φ xx B = C Φ xu = Φ y x B . Therefore, problem (9) is equiv alent to any of the follow- ing conv ex optimization problems (42)-(45) corresp onding to Prop ositions 1–4, resp ectively . min " Q 1 2 0 0 R 1 2 # " C Φ xy + I C Φ xx B Φ uy Φ ux B + I # 2 H 2 s.t. Φ xx , Φ xy , Φ ux , Φ uy satisfy (23) . (42) min " Q 1 2 0 0 R 1 2 # " Φ y y Φ y u Φ uy Φ uu # 2 H 2 s.t. Φ y y , Φ y u , Φ uy , Φ uu satisfy (25) . (43) min " Q 1 2 0 0 R 1 2 # " Φ y y Φ y x B Φ uy Φ ux B + I # 2 H 2 s.t. Φ y y , Φ uy , Φ y x , Φ ux satisfy (27) . (44) min " Q 1 2 0 0 R 1 2 # " C Φ xy + I C Φ xu Φ uy Φ uu # 2 H 2 s.t. Φ xy , Φ uy , Φ xu , Φ uu satisfy (29) . (45) 7 Co de is av ailable at https://github.com/soc- ucsd/h2_clp . V eh icle 1 V eh icle 2 V eh icle 0 M o t io n D ir ect io n Figure 4. Eac h vehicle has a pre-existing car-follo wing dynamics F ( · ) and the goal is to design an additional input u i ( t ) , i = 1 , 2 to improv e the car-following p erformance. Note that the H 2 norm of an FIR transfer ma- trix H = P T k =1 1 z k H k admits the following expression k H k 2 H 2 = P T k =1 T race( H T k H k ) . Thus, after imp osing the FIR constraint on the decision v ariables, problems (42)- (45) can b e reformulated in to QPs, for which v ery efficient solv ers exist. 7.2 Numeric al exp eriments Here, we use a car-following con trol scenario [36] (see Fig- ure 4 for illustration) to demonstrate the n umerical p erfor- mance of the parameterizations in Prop ositions 1-4. Mo del ling: W e denote the p osition and velocity of vehicle i as p i and v i . The spacing of vehicle i , i.e. , its relative dis- tance from vehicle i − 1, is defined as s i = p i − 1 − p i , i = 1 , 2. Without loss of generalit y , the v ehicle length is ignored. It is assumed that the leading vehicle 0 runs at a constant v elo cit y v 0 . Each vehicle has pre-existing car-following dy- namics, and w e aim to design an additional con trol signal u i ( t ) to improv e the car-following p erformance, i.e. , ˙ v i ( t ) = F ( s i ( t ) , ˙ s i ( t ) , v i ( t )) + u i ( t ) , (46) where ˙ s i ( t ) = v i − 1 ( t ) − v i ( t ), and F ( · ) characterizes the driv er’s natural car-follo wing behavior (see [37] for details). In an equilibrium car-follo wing state, each vehicle mov es with the same equilibrium v elo city , i.e. , v i ( t ) = v 0 , ˙ s i ( t ) = 0, for i = 1 , 2. Assuming that each v ehicle has a small p er- turbation from the equilibrium state ( s ∗ i , v ∗ ), w e define the error state b etw een actual and equilibrium state of v ehi- cle i as x i ( t ) = h ˜ s i ( t ) , ˜ v i ( t ) i T = h s i ( t ) − s ∗ i , v i ( t ) − v ∗ i T . Applying the first-order T aylor expansion to (46), w e can deriv e a linearized mo del for each v ehicle ( i = 1 , 2) ˙ ˜ s i ( t ) = ˜ v i − 1 ( t ) − ˜ v i ( t ) , ˙ ˜ v i ( t ) = α 1 ˜ s i ( t ) − α 2 ˜ v i ( t ) + α 3 ˜ v i − 1 ( t ) + u i ( t ) , with α 1 = ∂ F ∂ s i , α 2 = ∂ F ∂ ˙ s i − ∂ F ∂ v i , α 3 = ∂ F ∂ ˙ s i ev aluated at the equilibrium state. Assuming that we can measure the rela- tiv e spacing, we arrive at the following state-space mo del ˙ x = " P 1 0 P 2 P 1 # x + " B 1 0 0 B 1 # ( u + δ u ) , y = " C 1 0 0 C 1 # x + δ y , (47) where x = h x T 1 x T 2 i T , u = h u 1 u 2 i T , y = h ˜ s 1 ( t ) ˜ s 2 ( t ) i T , δ u and δ y are control input noise and measuremen t noise, 14 0 2 4 6 8 10 -2 0 2 0 2 4 6 8 10 -2 0 2 Figure 5. Resp onses using the con trollers from (42)-(45) with FIR length T = 30. T able 2 H 2 norm for differen t FIR lengths when solving the car-follo wing problem. FIR T 10 15 20 25 30 50 75 H 2 norm 54.20 17.41 7.56 4.08 2.49 2.03 2.02 ‡ : The H 2 norms from (42)-(45) hav e no difference up to four significant figures. † : The true H 2 norm from h2syn in MA TLAB is 2.02. resp ectiv ely , and P 1 = " 0 − 1 α 1 − α 2 # , P 2 = " 0 1 0 α 3 # , B 1 = " 0 1 # , C 1 = h 1 0 i . The ob jectiv e is to design u i ( t ) to regulate the spacing error s i ( t ) − s ∗ i and velocity error v i ( t ) − v ∗ based on the output information y ( t ). This problem can be form ulated in to (8) in the discrete-time domain. Numeric al r esults: In our numerical simulations, the car- follo wing parameters α 1 = 0 . 94 , α 2 = 1 . 5 , α 3 = 0 . 9 are cho- sen according to the setup in [38], and the op en-lo op system is stable. Using a forward Euler-discretization of (47) with a sampling time of dT = 0 . 1s, we formulate the corresp ond- ing optimal controller synthesis problem (8) in discrete- time with Q = I and R = I . This can be solv ed via an y of the con vex problems (42)-(45). W e v aried the FIR length T from 10 to 75, and the results are listed in T able I. As exp ected, when increasing the FIR length, the optimal cost from (42)-(45) conv erges to the true v alue returned b y the standard synthesis h2syn in MA TLAB. Given an initial state x 0 = [3 , 0 , − 2 , 0] T , Figure 5 shows the time-domain re- sp onses 8 of the closed-lo op system using the resulting con- trollers from (42)-(45) when the FIR length is T = 30. By design, the closed-loop system conv erges to the equilibrium state within 3 seconds. F or the same initial state, Figure 6 sho ws the time-domain resp onses of the closed-loop system when the FIR length is T = 75, where the system con verges 8 The resp onses from (42)-(45) hav e no visible difference. 0 2 4 6 8 10 -0.1 0 0.1 0.2 0 2 4 6 8 10 -2 0 2 Figure 6. Resp onses using the con trollers from (42)-(45) with FIR length T = 75. the equilibrium state within 7.5 seconds with low er p eak v alues during the transient process compared to the case T = 30. 8 Conclusions In this paper, we hav e characterized all p ossible parame- terizations for the set of stabilizing con trollers using closed- lo op maps. W e ha ve rev ealed tw o other parallel choices be- y ond the recent notions of SLP [6] and IOP [7]. In fact, our analysis allo ws to treat the SLP [6] and the IOP [7] in a unified w ay. After imposing the FIR appro ximation, the abilit y of the four parameterizations for enco ding C stab b e- comes different, and the IOP enjoys the b est appro ximation abilit y . These closed-lo op parameterizations can av oid com- puting the doubly co-prime factorization of the plan t a pri- ori , but instead require imp osing a set of affine constraints for ac hiev able closed-lo op resp onses. W e hav e discussed tw o n umerically robust scenarios: the SLP in the state feedback case and the IOP for op en-lo op stable plants. One future direction is to address decen tralized control, e.g. , the notion of quadratic in v ariance (QI) [9] and spar- sit y inv ariance (SI) [23], using different parameterizations. Also, similar to SLP [15, 16] and Y oula [17–19], it will be extremely interesting to inv estigate the features of different parameterizations in robust synthesis for uncertain systems and their applications in learning-based control. Finally , w e ha ve established that closed-loop parameterizations are more subtle in practice for op en-lo op unstable plants with output feedbac k, and further in vestigation is needed to un- ra v el a more precise and thorough understanding of related asp ects. Ac knowledgemen t: The authors would lik e to thank Nik olai Matni, James Anderson and John C Doyle for several insight- ful discussions, particularly around the robustness of the SLS framew ork. The authors thank John C Doyle for his encourage- men t to find a simple SISO example, ev entually leading to (39). W e also thank three anonymous review ers and Asso ciate Edi- tor, whose suggestions improv ed the quality of this w ork. 15 App endix A Pro of of Proposition 3 Statement 1 : Given an y K ∈ C stab , it is easy to deriv e that the closed-lo op resp onses (26) are Φ y x = ( I − GK ) − 1 C ( z I − A ) − 1 , Φ y y = ( I − GK ) − 1 , Φ ux = K ( I − GK ) − 1 C ( z I − A ) − 1 , Φ uy = K ( I − GK ) − 1 , whic h are all stable b y definition. Then, it is not difficult to v erify that Φ y x − GΦ ux = C ( z I − A ) − 1 , Φ y y − GΦ uy = ( I − GK ) − 1 − GK ( I − GK ) − 1 = I , and that Φ y x ( z I − A ) − Φ y y C = 0 , Φ ux ( z I − A ) − Φ uy C = 0 . Therefore, the closed-lo op responses Φ y x , Φ y y , Φ ux , Φ uy satisfy (27). Statement 2 : Consider any Φ y x , Φ y y , Φ ux , Φ uy satisfy- ing (27). Since Φ y y = I + GΦ uy and G is strictly prop er, w e kno w that Φ y y is alw ays inv ertible. Let K = Φ uy Φ − 1 y y . W e no w verify the resulting closed-lo op responses in (26) are all stable. In particular, we ha v e y = ( I − GK ) − 1 C ( z I − A ) − 1 δ x , and with K = Φ uy Φ − 1 y y , we hav e ( I − GΦ uy Φ − 1 y y ) − 1 C ( z I − A ) − 1 = Φ y y ( Φ y y − GΦ uy ) − 1 C ( z I − A ) − 1 = Φ y y C ( z I − A ) − 1 = Φ y x ∈ RH ∞ , where the equalities follo w from the fact that Φ y x , Φ y y , Φ ux , Φ uy satisfy (27). Also, we hav e that y = ( I − GΦ uy Φ − 1 y y ) − 1 δ y = Φ y y δ y . Similarly , we can show that u = K ( I − P 22 K ) − 1 C 2 ( z I − A ) − 1 δ x = Φ ux δ x , u = K ( I − P 22 K ) − 1 δ y = Φ uy δ y . Therefore, w e hav e prov ed that " δ x δ y # → " y u #! ∈ RH ∞ , using the con troller K = Φ uy Φ − 1 y y . By Theorem 1, w e kno w K = Φ uy Φ − 1 y y ∈ C stab . B Pro of of Theorem 2 The direction ( i ) ⇒ ( ii ) , ( iii ) , ( iv ) , ( v ) is true b y defini- tion. F or an y controller K , the closed-lo op resp onses are giv en in (10) and (11). W e now prov e ( ii ) ⇒ ( i ). Supp ose we hav e " δ x δ y # → " x u #! = " Φ xx Φ xy Φ ux Φ uy # ∈ F T . F rom (11), it is not difficult to chec k Φ xu = Φ xx B ∈ F T , and Φ y x = C Φ xx ∈ F T , Φ y y = C Φ xy + I ∈ F T Φ y u = C Φ xx B ∈ F T , Φ uu = Φ ux B + I ∈ F T . This means that the statemen t (i) is true. Similar argumen ts can prov e ( iii ) ⇒ ( v ) and ( iv ) ⇒ ( v ). Finally , if ( A, B , C ) and ( A k , B k , C k ) are b oth control- lable and observ able, w e prov e that ( v ) ⇒ ( i ). According to (19), we hav e the following state-space realization " δ y δ u # → " y u #! = ˆ C 1 ( z I − A cl ) − 1 ˆ B 2 + " I 0 D k I # , (B.1) where ˆ C 1 and ˆ B 2 are defined in (20). W e can sho w that ( A cl , ˆ B 2 , ˆ C 1 ) is controllable and observ able (see Ap- p endix E). This means that the eigenv alues of A cl are the same as the p oles of the transfer matrices [1, Chapter 3]. Therefore, if the statemen t ( v ) is true, then the closed-lo op matrix A cl only has zero eigenv alues and no eigenv alues of A cl is hidden from the input-output b ehavior. This completes the pro of. C Pro of of stabilizabilit y of (21) Consider a feedback gain K = h K 1 K 2 i , where K 1 ∈ R n × n , K 2 ∈ R n × p . W e hav e " A + B D k B C k B k A k # + " I 0 # h K 1 K 2 i = " A + B D k + K 1 B C k + K 2 B k A k # . Since ( A k , B k ) is stabilizable, there exists F k ∈ R n × q suc h that A k + B k F k is stable. By choosing K 1 = − A − B D k − I + F k B k K 2 = − B C k − ( A + B D k + K 1 ) F k + F k ( A k + B k F k ) , it can b e easily verify that " I F k 0 I # − 1 " A + B D k + K 1 B C k + K 2 B k A k # " I F k 0 I # = " − I 0 B k A k + B k F k # . 16 is stable. Since the similarit y transformation do es not c hange eigenv alues, there exist K 1 , K 2 suc h that " A + B D k + K 1 B C k + K 2 B k A k # is stable. This completes the pro of. 2 D Pro of of Proposition 4 Statement 1 : Given K ∈ C stab , it is easy to derive that the closed-lo op responses (28) are Φ xy = Φ xx B K , Φ xu = Φ xx B , Φ uy = K ( C Φ xx B K + I ) , Φ uu = K C Φ xx B + I , where Φ xx = ( z I − A − B K C ) − 1 ∈ RH ∞ . They are all stable by definition. Then, it is not difficult to verify that ( z I − A ) Φ xy − B Φ uy = ( z I − A ) Φ xx B K − B K ( C Φ xx B K + I ) = (( z I − A ) Φ xx − B K C Φ xx − I ) B K = 0 , and ( z I − A ) Φ xu − B Φ uu = ( z I − A ) Φ xx B − B ( C Φ xx B K + I ) = (( z I − A ) Φ xx − B K C Φ xx − I ) B = 0 , and that − Φ xy G + Φ xu = ( z I − A ) − 1 B , − Φ uy G + Φ uu = I . Therefore, the closed-lo op resp onses Φ y x , Φ uy , Φ xu , Φ uu satisfy (29). Statement 2 : Consider any Φ xy , Φ uy , Φ xu , Φ uu satisfy- ing (29). Since Φ uu = I + Φ uy G , Φ uu is alwa ys inv ertible. Let K = Φ − 1 uu Φ uy . W e no w v erify that the resulting closed- lo op resp onses (28) are all stable. In particular, we ha v e x = ( zI − A − B K C ) − 1 B δ u , and with the controller K = Φ − 1 uu Φ uy , we hav e ( z I − A − B Φ − 1 uu Φ uy C ) − 1 B =( z I − A ) − 1 ( I − B Φ − 1 uu Φ uy C ( z I − A ) − 1 ) − 1 B =( z I − A ) − 1 B ( I − Φ − 1 uu Φ uy G ) − 1 =( z I − A ) − 1 B ( Φ uu − Φ uy G ) − 1 Φ uu = Φ xu ∈ RH ∞ , where the last equality follows from the fact that Φ xy , Φ uy , Φ xu , Φ uu satisfy (29). Also, it is not difficult to deriv e that x = ( zI − A − B K C ) − 1 B K δ y = Φ xy δ y , u = K ( C Φ xx B K + I ) δ y = Φ uy δ y , u = ( K C ( z I − A − B K C ) − 1 B + I ) δ u = Φ uu δ u . Th us, we hav e prov ed that " δ y δ u # → " x u #! ∈ RH ∞ . By Theorem 1, we conclude that K = Φ − 1 uu Φ uy ∈ C stab . 2 E Con trollability and observ ability of (B.1) Lemma 4 ( [1]) The fol lowing statements ar e e quivalent: (1) ( A, B ) is c ontr ol lable; (2) ( A + B F , B ) is c ontr ol lable for any c omp atible matrix F ; (3) [ A − λI , B ] has ful l r ow r ank, ∀ λ ∈ C . W e are ready to prov e the controllabilit y of ( A cl , ˆ B 2 ). First, controllabilit y is in v ariant under state feedback. W e consider " A + B D k C B C k B k C A k # − " B D k B B k 0 # " C 0 0 0 # = " A B C k 0 A k # . Since ( A, B ) and ( A k , B k ) are controllable, we ha ve rank( λI − A, B ) = n and rank( λI − A k , B k ) = n k , ∀ λ ∈ C . Th us, rank " λI − A − B C k B D k B 0 λI − A k B k 0 #! = n + n k , ∀ λ ∈ C , indicating that ( A cl , ˆ B 2 ) is con trollable. The observ ability of ( A cl , ˆ C 1 ) can b e prov ed in a similar wa y . F State space realizations In this section, w e use the following system op erations v ery often (see [1, Chapter 3.6]). Consider tw o dynamic systems G i = A i B i C i D i , i = 1 , 2 . Their inv erses are given by G − 1 i = A i − B i D − 1 i C i − B i D − 1 i D − 1 i C i D − 1 i , where we assume D i is inv ertible. If the system is strictly prop er, then the inv erse will b e non-prop er and there is no state-space realization. The cascade connection of t wo systems such that y = G 1 G 2 u has a realization G 1 G 2 = A 1 B 1 C 2 B 1 D 2 0 A 2 B 2 C 1 D 1 C 2 D 1 D 2 (F.1) and a parallel connection y = ( G 1 − G 2 ) u has a realization G 1 − G 2 = A 1 0 B 1 0 A 2 B 2 C 1 − C 2 D 1 − D 2 . (F.2) W e note that (F.1) and (F.2) are in general not minimal. In addition, we use the follo wing fact: for any in vertible matrix 17 T with prop er dimension, G i = A i B i C i D i = T A i T − 1 T B i C i T − 1 D i . (F.3) State sp ac e r e alization of the SLP c ontr ol ler F or the SLP controller K = Φ uy − Φ ux Φ − 1 xx Φ xy in Prop osition 1, we assume the system resp onses Φ uy , Φ ux , Φ xx , Φ xy are FIR transfer matrices of horizon T , i.e. , Φ ux = T X t =0 M t 1 z t ∈ RH ∞ , Φ xx = T X t =0 R t 1 z t ∈ RH ∞ , Φ xy = T X t =0 N t 1 z t ∈ RH ∞ . (F.4) Up on defining the following matrices ˆ M = h M 2 M 3 . . . M T i ∈ R m × n ˆ T , ˆ R = h R 2 R 3 . . . R T i ∈ R n × n ˆ T , ˆ N = h N 1 N 2 . . . N T i ∈ R n × pT , (F.5) and Z n ∈ R n ˆ T × n ˆ T as the down shift op erator with sub- diagonal containing iden tity matrices of dimension n × n , and I n = [ I n , 0 , . . . , 0] T ∈ R n ˆ T × n , with ˆ T = T − 1, w e hav e the following result. Theorem 6 Supp ose that Φ uy , Φ ux , Φ xx , Φ xy ar e FIR tr ansfer matric es with horizon T in (31) and (F.4) . A state-sp ac e r e alization for the output fe e db ack c ontr ol ler K = Φ uy − Φ ux Φ − 1 xx Φ xy is given by K = Z n − I n ˆ R −I n ˆ N 0 0 Z p I p ˆ M − M 1 ˆ R ˆ U − M 1 ˆ N U 0 . (F.6) Pr o of of The or em 3 Considering the FIR transfer matrices Φ uy and Φ y y in (31). By the affine constraint (25), we alwa ys hav e Y 0 = I p . The following state-space realizations of Φ uy and Φ y y are Φ uy = Z p I p ˆ U U 0 , Φ y y = Z p I p ˆ Y I p , with ˆ U and ˆ Y defined in (31), and Z p and I p defined as Z p = 0 0 0 . . . 0 I p 0 0 . . . 0 0 I p 0 . . . 0 . . . . . . . . . . . . . . . 0 0 . . . I p 0 ∈ R pT × pT , I p = I p 0 . . . 0 ∈ R pT × p . Then, we hav e Φ uy Φ − 1 y y = Z p I p ˆ U U 0 Z p I p ˆ Y I p − 1 = Z p I p ˆ U U 0 Z p − I p ˆ Y −I p ˆ Y I p = Z p I p ˆ Y I p 0 Z p − I p ˆ Y −I p ˆ U U 0 ˆ Y U 0 . By defining a transformation T = " I I 0 I # , T − 1 = " I − I 0 I # , with compatible dimension, and according to (F.3), w e hav e Φ uy Φ − 1 y y = Z p 0 0 0 Z p − I p ˆ Y −I p ˆ U U 0 ˆ Y − ˆ U U 0 = Z p − I p ˆ Y −I p U 0 ˆ Y − ˆ U U 0 . In the last step, we hav e remov ed some uncontrollable and unobserv able mo des. Pr o of of The or em 6 First, similar to the realization of Φ uy Φ − 1 y y , we hav e Φ ux Φ − 1 xx = ( z Φ ux )( z Φ xx ) − 1 = Z n − I n ˆ R −I n M 1 ˆ R − ˆ M M 1 , where ˆ M and ˆ R are defined in (F.5), and Z n and I n are defined as Z n = 0 0 0 . . . 0 I n 0 0 . . . 0 0 I n 0 . . . 0 . . . . . . . . . . . . . . . 0 0 . . . I n 0 ∈ R n ˆ T × n ˆ T , I n = I n 0 . . . 0 ∈ R n ˆ T × n . 18 Then, we hav e Φ uy − ( z Φ ux )( z Φ xx ) − 1 Φ xy = Z p I p ˆ L L 0 − Z n − I n ˆ R −I n ˆ N 0 0 Z p I p M 1 ˆ R − ˆ M M 1 ˆ N 0 = Z p 0 0 I p 0 Z n − I n ˆ R −I n ˆ N 0 0 0 Z p I p ˆ L − M 1 ˆ R + ˆ M − M 1 ˆ N L 0 Define a similarity transformation ˆ T = I 0 − I 0 I 0 0 0 I , ˆ T − 1 = I 0 I 0 I 0 0 0 I . W e derive Φ uy − Φ ux Φ − 1 xx Φ xy = Z n − I n ˆ R −I n ˆ N 0 0 Z p I p − M 1 ˆ R + ˆ M − M 1 ˆ N + ˆ L L 0 . G Deriv ations of (38) F or notational con venience, we use ( R , M , N , L ) in place of ( ˆ Φ xx , ˆ Φ ux , ˆ Φ xy , ˆ Φ uy ) here, as used in [6]. The follow- ing deriv ations utilize the affine relationship (36) multiple times: ( z I − A − B K C ) − 1 =( z I − A − B ( L − MM − 1 N ) C ) − 1 =( z I − A − B L C + B MR − 1 N C ) − 1 =( z I − A − B ( M ( z I − A ) − ˆ ∆ 4 ) + B MR − 1 N C ) − 1 =( z I − A − B M ( z I − A ) + B ˆ ∆ 4 + B MR − 1 N C ) − 1 =( z I − A − B MR − 1 ( R ( z I − A ) − N C ) + B ˆ ∆ 4 ) − 1 =( z I − A − B MR − 1 ( I + ˆ ∆ 3 ) + B ˆ ∆ 4 ) − 1 =( z I − A − B MR − 1 − B MR − 1 ˆ ∆ 3 + B ˆ ∆ 4 ) − 1 = R (( z I − A ) R − B M − B MR − 1 ˆ ∆ 3 R + B ˆ ∆ 4 R ) − 1 = R ( I + ˆ ∆ 1 − B MR − 1 ˆ ∆ 3 R + B ˆ ∆ 4 R ) − 1 = R ( I + ˆ ∆ 1 − (( z I − A ) R − I − ˆ ∆ 1 ) R − 1 ˆ ∆ 3 R + B ˆ ∆ 4 R ) − 1 . W e can further simplified this expression: R ( I + ˆ ∆ 1 − (( z I − A ) R − I − ˆ ∆ 1 ) R − 1 ˆ ∆ 3 R + B ˆ ∆ 4 R ) − 1 =(( I + ˆ ∆ 1 ) R − 1 − ( z I − A ) ˆ ∆ 3 + ( I + ˆ ∆ 1 ) R − 1 ˆ ∆ 3 + B ˆ ∆ 4 ) − 1 =( I + ˆ ∆ ) − 1 R ( I + ˆ ∆ 1 ) − 1 , where ˆ ∆ is defined in (37). H Robustness of Mixed I/II parameterizations W e consider the Mixed I parameterization in Prop osi- tion 3. The transfer matrices ˆ Φ y x , ˆ Φ ux , ˆ Φ y y , ˆ Φ uy only ap- pro ximately satisfy the affine constraint (27), i.e. , we hav e h I − G i " ˆ Φ y x ˆ Φ y y ˆ Φ ux ˆ Φ uy # = h C ( z I − A ) − 1 + ∆ 1 I + ∆ 2 i , " ˆ Φ y x ˆ Φ y y ˆ Φ ux ˆ Φ uy # " z I − A − C # = " ∆ 3 ∆ 4 # , ˆ Φ y x , ˆ Φ ux , ˆ Φ y y , ˆ Φ uy ∈ RH ∞ , (H.1) where ∆ 1 , ∆ 2 , ∆ 3 , ∆ 4 are the computational residuals. Theorem 7 L et ˆ Φ y x , ˆ Φ ux , ˆ Φ y y , ˆ Φ uy satisfy (H.1) . Then, we have the fol lowing statements. (1) In the c ase of G ∈ RH ∞ , the c ontr ol ler K = ˆ Φ uy ˆ Φ − 1 y y internal ly stabilizes the plant G if and only if ( I + ∆ 2 ) − 1 is stable. (2) In the c ase of G / ∈ RH ∞ , the c ontr ol ler K = ˆ Φ uy ˆ Φ − 1 y y c annot guar ante e the internal stability of the close d- lo op system unless ∆ 1 = 0 , ∆ 2 = 0 , ∆ 3 = 0 , ∆ 4 = 0 . The pro of is almost identical to that of Theorem 4. W e then consider Mixed I I parameterization in Prop osi- tion 4. The transfer matrices ˆ Φ xy , ˆ Φ uy , ˆ Φ xu , ˆ Φ uu only ap- pro ximately satisfy the affine constraint (29), i.e. , we hav e h z I − A − B i " ˆ Φ xy ˆ Φ xu ˆ Φ uy ˆ Φ uu # = h ∆ 1 ∆ 2 i , " ˆ Φ xy ˆ Φ xu ˆ Φ uy ˆ Φ uu # " − G I # = " ( z I − A ) − 1 B + ∆ 3 I + ∆ 4 # , ˆ Φ xy , ˆ Φ uy , ˆ Φ xu , ˆ Φ uu ∈ RH ∞ , (H.2) where ∆ 1 , ∆ 2 , ∆ 3 , ∆ 4 are the computational residuals. Theorem 8 L et ˆ Φ xy , ˆ Φ uy , ˆ Φ xu , ˆ Φ uu satisfy (H.2) . Then, we have the fol lowing statements. (1) In the c ase of G ∈ RH ∞ , the c ontr ol ler K = ˆ Φ − 1 uu ˆ Φ uy internal ly stabilizes the plant G if and only if ( I + ∆ 4 ) − 1 is stable. (2) In the c ase of G / ∈ RH ∞ , the c ontr ol ler K = ˆ Φ − 1 uu ˆ Φ uy c annot guar ante e the internal stability of the close d- lo op system unless ∆ 1 = 0 , ∆ 2 = 0 , ∆ 3 = 0 , ∆ 4 = 0 . The pro of is similar to that of Theorem 4. W e just highlight that for the case G ∈ RH ∞ , w e only need to chec k the closed-lo op resp onse from δ y to u , which is u = K ( I − GK ) − 1 δ y = ( I − K G ) − 1 K δ y = ( I − ˆ Φ − 1 uu ˆ Φ uy G ) − 1 ˆ Φ − 1 uu ˆ Φ uy δ y = ( I + ∆ 4 ) − 1 ˆ Φ uy δ y . Then, the first statement in Theorem 8 b ecomes ob vious. 19 I Pro of of Proposition 5 Pro of: ⇐ W e first prov e that ∀ K ∈ ˆ C stab , we ha v e K ∈ C stab . Since K ∈ ˆ C stab , we know " ( I − ˆ GK 1 ) − 1 ( I − ˆ GK 1 ) − 1 ˆ G K 1 ( I − ˆ GK 1 ) − 1 ( I − K 1 ˆ G ) − 1 # ∈ RH ∞ , where ˆ G = ( I − GK 0 ) − 1 G and K = K 1 + K 0 with K 0 ∈ C stab ∩ RH ∞ . Now, we verify that ( I − G ( K 0 + K 1 )) − 1 = ( I − ˆ GK 1 ) − 1 ( I − GK 0 ) − 1 ∈ RH ∞ ( I − G ( K 0 + K 1 )) − 1 G = ( I − ˆ GK 1 ) − 1 ˆ G ∈ RH ∞ and that ( K 0 + K 1 )( I − GK ) − 1 = K 0 ( I − GK ) − 1 + K 1 ( I − GK ) − 1 ∈ RH ∞ . Finally , we show ( I − ( K 0 + K 1 ) G ) − 1 = ( I − K 1 ˆ G ) − 1 ( I − K 0 G ) − 1 ∈ RH ∞ . By Theorem 1, we hav e prov ed K = K 0 + K 1 ∈ C stab . ⇒ : This direction is similar: ∀ K ∈ C stab , we pro ve that K 1 = K − K 0 in ternally stabilizes ˆ G . F or example ( I − ˆ GK 1 ) − 1 = ( I − GK ) − 1 ( I + GK 0 ) = ( I − GK ) − 1 + ( I − GK ) − 1 GK 0 ∈ RH ∞ , and other conditions can b e prov ed similarly . W e complete the pro of. References [1] K. Zhou, J. C. Doyle, K. Glov er et al. , R obust and optimal c ontr ol . Prentice hall New Jersey , 1996, v ol. 40. [2] G. E. Dullerud and F. Paganini, A c ourse in robust c ontr ol the ory: a convex appr oach . Springer Science & Business Media, 2013, vol. 36. [3] S. P . Boyd and C. H. Barratt, Line ar c ontroller design: limits of p erformanc e . Prentice Hall Englew o o d Cliffs, NJ, 1991. [4] D. Y oula, H. Jabr, and J. Bongiorno, “Mo dern Wiener-Hopf design of optimal controllers–Part II: The m ultiv ariable case,” IEEE T rans. Autom. Contr ol. , vol. 21, no. 3, pp. 319–338, 1976. [5] A. F rancis, A c ourse in H ∞ c ontr ol the ory . Springer-V erlag, 1987. [6] Y.-S. W ang, N. Matni, and J. C. Do yle, “A system level approac h to controller syn thesis,” IEEE T rans. A utom. Contr ol. , 2019. [7] L. F urieri, Y. Zheng, A. P apachristodoulou, and M. Kamgarp our, “An input-output parametrization of stabilizing controllers: amidst Y oula and system level synthesis,” IEEE Contr ol Systems L etters , vol. 3, no. 4, pp. 1014–1019, Oct 2019. [8] S.-H. Tseng and J. L. Shuang, “SLSpy: Python-Based System- Level Controller Synthesis F ramework,” arXiv e-prints , p. arXiv:2004.12565, Apr. 2020. [9] M. Rotko witz and S. Lall, “A characterization of conv ex problems in decentralized control,” IEEE T r ans. Autom. Contr ol. , vol. 51, no. 2, pp. 274–286, 2006. [10] X. Qi, M. V. Salapak a, P . G. V oulgaris, and M. Khammash, “Structured optimal and robust control with m ultiple criteria: A conv ex solution,” IEEE T rans. Autom. Contr ol. , vol. 49, no. 10, pp. 1623–1640, 2004. [11] L. Lessard and S. Lall, “Conv exity of decen tralized controller synthesis,” IEEE T r ans. Autom. Contr ol. , v ol. 61, no. 10, pp. 3122–3127, 2015. [12] P . Shah and P . A. P arrilo, “ H 2 -optimal decentralized control ov er p osets: A state-space solution for state-feedback,” IEEE T r ans. Autom. Contr ol. , vol. 58, no. 12, pp. 3084–3096, 2013. [13] N. Matni and V. Chandrasek aran, “Regularization for design,” IEEE T r ans. Autom. Contr ol. , v ol. 61, no. 12, pp. 3991–4006, 2016. [14] S ¸ . Sab˘ au and N. C. Martins, “Y oula-like parametrizations sub ject to QI subspace constrain ts,” IEEE T rans. Autom. Contr ol. , vol. 59, no. 6, pp. 1411–1422, 2014. [15] S. D ean, H. Mania, N. Matni, B. Rech t, and S. T u, “On the sample complexity of the linear quadratic regulator,” F oundations of Computational Mathematics , pp. 1–47, 2017. [16] ——, “Regret b ounds for robust adaptive control of the linear quadratic regulator,” in Advanc es in Neur al Information Pr o cessing Systems , 2018, pp. 4188–4197. [17] M. Simcho witz, K. Singh, and E. Hazan, “Improp er learning for non-stochastic control,” arXiv preprint , 2020. [18] S. Lale, K. Azizzadenesheli, B. Hassibi, and A. Anandkumar, “Logarithmic regret b ound in partially linear dynamical systems,” , 2020. [19] L. F urieri, Y. Zheng, and M. Kamgarp our, “Learning the globally optimal distributed LQ regulator,” 2nd L4DC Confer ence , pp. 1–12, 2020. [20] Y. Zheng, L. F urieri, M. Kamgarpour, and N. Li, “Sample complexity of linear quadratic gaussian (lqg) control for output feedback systems,” in L earning for Dynamics and Contr ol . PMLR, 2021, pp. 559–570. [21] H. S. Witsenhausen, “A counterexample in sto chastic optim um control,” SIAM J. Contr ol , vol. 6, no. 1, pp. 131–147, 1968. [22] J. Tsitsiklis and M. A thans, “On the complexity of decentralized decision making and detection problems,” IEEE T rans. Autom. Contr ol. , vol. 30, no. 5, pp. 440–446, 1985. [23] L. F urieri, Y. Zheng, A. P apachristodoulou, and M. Kamgarp our, “Sparsity inv ariance for conv ex design of distributed con trollers,” IEEE T r ans. Contr ol Netw. Syst. , pp. 1–12, 2020. [24] Y. Zheng, L. F urieri, A. Papac hristo doulou, N. Li, and M. Kamgarpour, “On the equiv alence of Y oula, system-level and input-output parameterizations,” IEEE T r ans. Autom. Control. , pp. 1–8, 2020. [25] J. Anderson, J. C. Do yle, S. H. Low, and N. Matni, “System level syn thesis,” Annual R eviews in Contr ol , 2019. [26] J. Anderson and N. Matni, “Structured state space realizations for SLS distributed controllers,” in 2017 55th A nnual Al lerton Confer enc e on Communication, Contr ol, and Computing (Allerton) . IEEE, 2017, pp. 982–987. [27] C. Nett, C. Jacobson, and M. Balas, “A connection b etw een state-space and doubly coprime fractional representations,” IEEE T rans. Autom. Contr ol. , vol. 29, no. 9, pp. 831–832, 1984. [28] V. Pohl and H. Bo che, A dvance d topics in system and signal the ory: a mathematic al appr oach . Springer Science & Business Media, 2009, vol. 4. 20 [29] A. Rantzer, “Realizability and internal mo del con trol on netw orks,” in 2019 18th Eur op e an Contr ol Conferenc e (ECC) . IEEE, 2019, pp. 3475–3477. [30] A. S. M. V amsi and N. Elia, “Optimal distributed con trollers realizable ov er arbitrary net works,” IEEE T ransactions on Automatic Contr ol , vol. 61, no. 1, pp. 129–144, 2015. [31] Y.-S. W ang, N. Matni, and J. C. Doyle, “Separable and localized system-level synthesis for large-scale systems,” IEEE T r ans. Autom. Contr ol. , vol. 63, no. 12, pp. 4234–4249, 2018. [32] E. Jensen and B. Bamieh, “An explicit parametrization of closed loops for spatially distributed controllers with sparsity constraints,” IEEE T r ansactions on Automatic Contr ol , 2021. [33] J. F. Sturm, “Using sedumi 1.02, a matlab toolb ox for optimization o ver symmetric cones,” Optimization metho ds and softwar e , vol. 11, no. 1-4, pp. 625–653, 1999. [34] E. D. Andersen and K. D. Andersen, “The MOSEK interior point optimizer for linear programming: an implementation of the homogeneous algorithm,” in High p erformanc e optimization . Springer, 2000. [35] N. Matni, Y.-S. W ang, and J. Anderson, “Scalable system lev el synthesis for virtually localizable systems,” in Pr o c. 56th IEEE Conf. De cis. Contr ol, . IEEE, 2017, pp. 3473–3480. [36] Y. Zheng, S. E. Li, J. W ang, D. Cao, and K. Li, “Stability and scalabilit y of homogeneous v ehicular platoon: Study on the influence of information flow topologies,” IEEE T r ans. Intel l. T r ansp. Syst. , vol. 17, no. 1, pp. 14–26, 2015. [37] G. Orosz, R. E. Wilson, and G. St ´ ep´ an, “T raffic jams: dynamics and control,” 2010. [38] Y. Zheng, J. W ang, and K. Li, “Smoothing traffic flow via con trol of autonomous v ehicles,” IEEE Internet of Things Journal , vol. 7, no. 5, pp. 3882–3896, 2020. 21
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment