대칭을 이용한 매끄러운 다양체 관측기 설계: 번들 프레임워크와 기하학적 분해
본 논문은 리군 작용이 존재하는 매끄러운 다양체 위의 비선형 관측기 설계를 위해 번들 이론을 도입한다. 리군의 궤도와 몫공간(quotient space)으로 시스템을 분해하고, 자유 작용(free action)인 경우에는 주섬(principal) 번들을, 비자유 작용인 경우에는 일반 번들을 이용해 기하학적 구조를 명시한다. 특히 리군 자체에 대한 그래디언트 기반 관측기 설계 방법을 제시하고, SO(3)가 R³\{0\}에 작용하는 사례와 SLAM…
저자: Anant A. Joshi, D.H.S. Maithripala, Ravi N. Banavar
본 논문은 리군 G가 매끄러운 다양체 P에 작용하는 상황에서 비선형 관측기 설계에 필요한 기하학적 도구들을 체계적으로 정리하고, 이를 기반으로 관측기 설계 프레임워크를 제시한다. 서론에서는 기존 칼만 필터 기반 비선형 추정기(EKF, UKF, MEKF 등)의 한계와, 리군 위에서 직접 설계된 관측기들의 연구 동향을 소개한다. 특히, 대칭성을 이용한 관측기 설계가 기존 문헌에서는 부분적으로만 다루어졌으며, 번들 이론을 통한 전반적인 구조적 해석은 부재함을 지적한다.
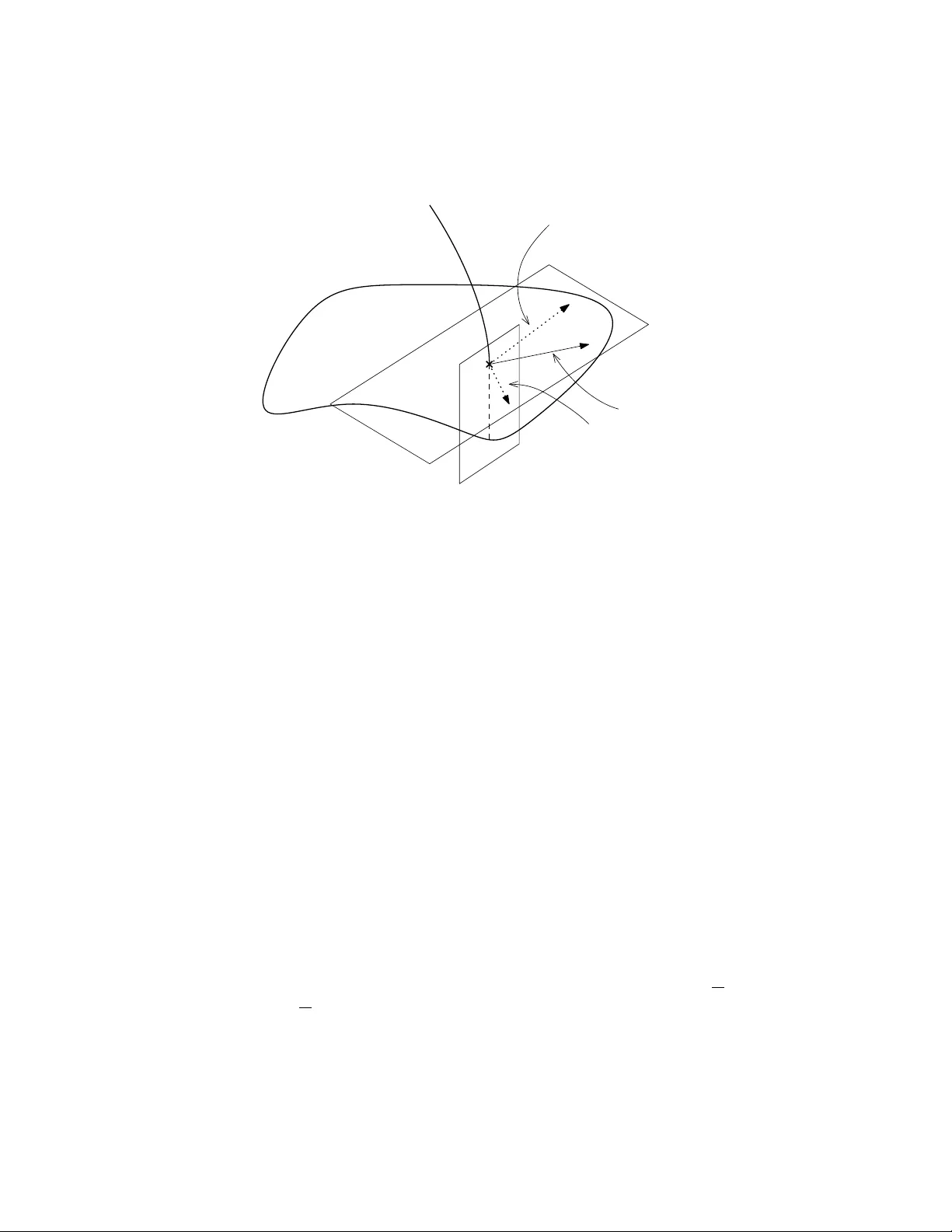
2장에서는 번들 이론의 기본 개념을 정리한다. 리군 작용 φ: G×P→P 의 정의, 궤도 O(p), 몫공간 P/G, 그리고 작용이 자유(free), 전Proper(proper), 전이(transitive)인 경우의 차이를 설명한다. 수직공간 V_p = {ζ_P(p) | ζ∈𝔤} 과 수평공간을 연결(connection)으로 정의하고, 자유 작용일 때 (P, P/G, π) 가 주섬 번들 구조를 갖는다는 사실을 정리한다. 또한, 비자유 작용일 경우에도 고정점 G_p 와 그에 따른 차원 감소를 통해 일반 번들 구조를 구성할 수 있음을 보인다.
3장에서는 시스템 동역학이 리군‑불변 벡터장 f 에 의해 기술될 때, f가 자연스럽게 베이스와 리군 두 부분으로 분해될 수 있음을 정리한다. 핵심 정리 3.2는 f가 G‑불변이면, 베이스 공간 P/G 위에 유도된 벡터장 f_B와 리군 G 위에 정의된 보정 벡터장 f_G가 존재함을 증명한다. 이때, 전체 상태 p∈P 는 (x,g) (베이스 x∈P/G, 리군 g∈G) 쌍으로 표현되고, 동역학은
ẋ = f_B(x), ġ = f_G(g, x)
와 같이 분리된다. 이러한 분해는 관측기 설계 시 두 서브시스템을 독립적으로 다룰 수 있게 해준다.
4장에서는 리군 G 위의 관측기 설계 방법을 구체화한다. 비용함수 Ψ: G→ℝ₊ 을 정의하고, 그 그래디언트 ∇Ψ를 이용해 오차 e = ĝ⁻¹g 에 대한 자율 오류 동역학 ė = −k ∇Ψ(e) 을 도출한다. Ψ가 G‑불변이고 최소값을 e=I 에서 갖는 경우, Lyapunov 함수 V(e)=Ψ(e) 를 사용해 전역 지수안정성을 증명한다. 특히, SO(3) 에 대해서는 Ψ(R)=½‖I−R‖_F² 을 선택하고, 그 그래디언트는 ∇Ψ(R)=R skew(RᵀI) 와 같이 간단히 표현된다. 이와 유사하게 SE(3) 에 대해서도 위치와 자세를 동시에 고려한 비용함수를 설계한다.
베이스 공간 P/G 에 대한 관측기 설계는 일반적인 방법론이 존재하지 않으며, 문제에 따라 관측가능성(Observability) 분석을 선행해야 한다. 논문은 두 가지 사례를 통해 이를 보여준다. 첫 번째 사례는 SO(3) 가 R³\{0\} 에 작용하는 경우이다. 여기서 작용이 자유가 아니므로 고정점 G_p≈SO(2) 가 존재한다. 베이스 좌표는 거리 r=‖p‖, 수평 좌표는 방향 p/‖p‖ 로 정의된다. 거리와 베어링(방향) 측정을 이용해 베이스 오차를 추정하고, 리군 오차는 앞서 제시한 그래디언트 관측기로 보정한다. 두 번째 사례는 SLAM 문제이다. 차량 자세 g∈SE(3) 와 지도 ℓ_i∈ℝ³ 가 결합된 상태공간이 SE(3)×ℝ^{3N} 에 존재한다. 여기서는 작용이 자유이므로 전역적인 주섬 번들 구조와 전역 단면이 존재한다. 베이스(지도) 부분은 기존 EKF/UKF와 같은 확률적 필터링 기법을 적용하고, 자세 부분은 그래디언트 기반 관측기로 설계한다. 특히, 비공선적 랜드마크를 이용해 자세 관측가능성을 확보하는 방법을 제시한다.
5장에서는 전체 논문의 구조를 정리하고, 제안된 프레임워크가 기존 관측기 설계와 비교해 갖는 장점—예를 들어, 대칭성을 명시적으로 활용해 설계 차원을 감소시키고, 수직·수평 분해를 통해 안정성 분석을 직관적으로 수행할 수 있다는 점—을 강조한다. 또한, 향후 연구 과제로 비자유 작용에 대한 보다 일반적인 연결 선택, 베이스 공간에 대한 통합 설계 방법론, 그리고 이산시간 및 확률적 잡음이 포함된 시스템에 대한 확장 가능성을 제시한다.
결론적으로, 본 논문은 리군 대칭성을 갖는 매끄러운 다양체 위의 비선형 시스템에 대해 번들 이론을 기반으로 한 체계적인 관측기 설계 프레임워크를 제공한다. 이는 로봇공학, 항공우주, 기계시스템 등에서 대규모 상태공간을 효율적으로 추정하고 제어하기 위한 강력한 도구가 될 것으로 기대된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기