A bundle framework for observer design on smooth manifolds with symmetry
The article presents a bundle framework for nonlinear observer design on a manifold with a Lie group action. The group action on the manifold decomposes the manifold to a quotient structure and an orbit space, and the problem of observer design for t…
Authors: Anant A. Joshi, D.H.S. Maithripala, Ravi N. Banavar
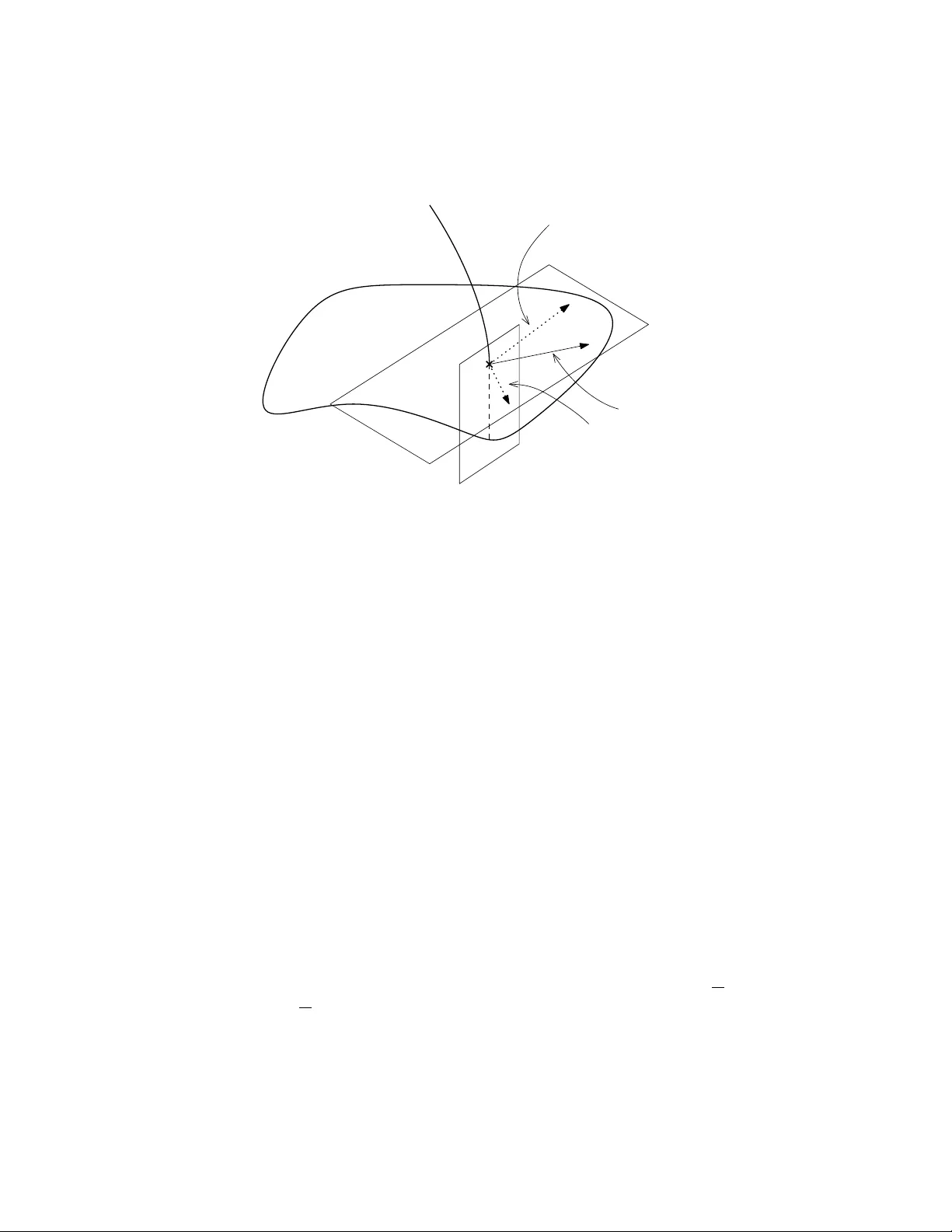
Manuscript submitted to doi:10.3934/xx.xxxxxxx AIMS’ Journals V olume X , Number 0X , XX 200X pp. X–XX A BUNDLE FRAMEW ORK F OR OBSER VER DESIGN ON SMOOTH MANIF OLDS WITH SYMMETR Y Anant A. Joshi Department of Mechanical Engineering, Indian Institute of T echnology Bomba y , Mum bai Maharashtra, 400069, India D.H.S. Maithrip ala Department of Mechanical Engineering, Universit y of Peradeniy a, KY20400, Sri Lanka. School of P ostgraduate Studies, Sri Lanka T echnological Campus, Padukka, CO 10500, Sri Lanka Ra vi N. Bana v ar ∗ Department of Systems and Control Engineering, Indian Institute of T echnology Bomba y , Mum bai Maharashtra, 400069, India (Comm unicated by the associate editor name) Abstract. The article presents a bundle framework for nonlinear observer design on a manifold with a a Lie group action. The group action on the manifold decomposes the manifold to a quotien t structure and an orbit space, and the problem of observer design for the entire system gets decomp osed to a design ov er the orbit (the group space) and a design o ver the quotient space. The emphasis throughout the article is on presenting an o v erarching geometric structure; the special case when the group action is free is given special emphasis. Gradient based observ er design on a Lie group is given explicit attention. The concepts develop ed are illustrated b y applying them on well known examples, which include the action of SO (3) on R 3 \ { 0 } and the simultaneous lo calisation and mapping (SLAM) problem. 1. In tro duction. Observ er design and estimator design ha v e enjo y ed a long his- tory after the appearance of seminal w ork [ 31 , 32 , 39 ]. The Kalman filter w as dev elop ed for linear systems but it has been mo dified and applied to v arious other systems as w ell. Much of estimation theory in engineering has centred around the Kalman filter. The setting of the problem is a vector space and the to ols in volv e linear systems theory . Nonlinear extensions to the Kalman filter ha ve not pushed 2020 Mathematics Subje ct Classific ation. Primary: 93B27. K ey wor ds and phr ases. Lie group symmetry , Observer design, Bundle structure, Fibre bundle, Principal bundle. The authors would like to thank the Indian Institute of T echnology Bom bay and the Sri Lanka T echnological Campus, P adukka, for their supp ort b oth logistical and financial. ∗ Corresponding author. 1 2 A. A. JOSHI, D.H.S. MAITHRIP ALA AND R. N. BANA V AR the domain of theoretical ideas, but ha v e largely b een restricted to ideas like lin- earization, such as the, extended Kalman filter (EKF) [ 23 ], unscented Kalman filter [ 23 , 29 , 30 ], and the multiplicativ e extended Kalman filter [ 38 , 47 , 48 ]. The work [ 24 ] presents more such tec hniques for attitude estimation. The dynamics of a large class of mechanical and aerospace systems, ho wev er, ev olv e in a nonlinear setting, and in particular, on smooth manifolds or specifically on Lie groups. Con trol syn- thesis for suc h systems in an in trinsic framework, that respects the geometry of the underlying manifold, has been muc h studied in the past t wo decades [ 10 , 11 , 12 , 20 ]. The parallel, observer design or estimator design, has received less atten tion. Our w ork fo cusses on the latter. There is a large bo dy of work in non-linear obser ver design, see [ 1 , 36 , 52 , 54 ]. Man y aero-mechanical systems are mathematically mo delled as systems evolving on Lie groups. In trinsic observers directly on the Lie group are designed to av oid the pitfalls of parametrization, like Euler angles (that suffers from singularity at particular configurations), or quaternions (that suffer from o v er-parametrization of the rotation group). The concept of fusing tw o measurements with different frequency characteristics to design an observ er for attitude estimation directly on SO (3) rather than using quaternions or Euler angles was presen ted in [ 42 ]. This complemen tary filtering was extended to the case when observ ations are made from the inertial frame and relay ed to the agen t in [ 43 ], and the work also shows when observ ability can be achiev ed with a single direction measurement. Complemen tary filtering on the Lie groups SE (3) and SL (3) has also been done [ 4 , 44 ]. The w ork of [ 3 ] contains an observ er on SE (3), that is similar in structure to what is presented in [ 42 ]. The w ork rep orted in [ 16 ] demonstrates a separation principle on Lie groups for linearized con troller and observ er design. The in v ariant extended Kalman filter in [ 8 , 13 ] applies the ideas of the conv en tional extended Kalman Filter to Lie groups. Ho wev er, it also in v olves linearization of state error to propagate co v ariance (just as in a conv entional EKF). It has b een studied further in [ 17 ], in the setting of symmetry preserving observers presented in [ 14 ]. Its stabilit y prop erties hav e also b een studied in [ 6 , 7 ]. Extending these notions to the discrete setting, an intrinsic discrete EKF for Lie groups is presented in [ 18 ]. Motiv ated by the Kalman filter for linear systems, an estimator design for discrete time systems evolving on Lie groups p erturbed by stochastic noise is also developed in [ 5 ]. Gradien t based techniques for designing observers are v ery intuitiv e to under- stand, since they can be visualised as a gradient descen t kind of algorithm mo ving to mak e the observ er error zero. The work [ 35 ] in tro duces the id ea of gradien t based observ er design for kinematic systems ev olving on Lie groups assuming full state and input measurement while [ 33 ] gives a gradient based observer for discrete time observ er design on SO (3). These ideas are also applied in [ 28 ] to the design of gra- dien t based observer on SE (3) assuming v elo city measuremen ts and measurement of p osition of n p oin ts whose inertial locations are kno wn. Extending these results gradien t based observ ers for simultaneous lo calisation and mapping (SLAM) hav e b een developed in [ 55 , 59 ]. Similar to optimal control, optimal observ er design has also received some at- ten tion. Near optimal (deterministic) filters (filters on which we know ho w far they are from optimalit y) hav e b een dev eloped for systems evolving on S 1 , SO ( n ) [ 22 , 57 ]. The w ork presen ted in [ 58 ] considers optimal attitude filtering considering EXPLOITING SYMMETR Y IN OBSER VER DESIGN 3 only kinematics and [ 51 ] extends that to dynamics as w ell (on the tangent bundle of the Lie group). While the manifold framew ork to observer design with group symmetry has been presen ted by quite a few individuals, all these contributions hav e b een cited either b efore or after this paragraph, the ov erarc hing mathematical framework replete with all the to ols - bundle theory , section assignment, connection, v ertical and horizon tal spaces, flows on the base space and fibre space - has b een distinctly missing. This article fills in this gap. T o encompass a large class of engineering systems of interest, we fo cus on the case when there is a Lie group G acting on the configuration manifold P of the system and the system is also in v arian t under this action. It is also assumed that the same Lie group acts on the output manifold so as to hav e a group action equiv ariant output. W e briefly explain the mathematical machinery now. When a Lie group G acts prop erly on a smooth manifold P , it pro vides a stratification of the manifold where eac h stratum corresp onds to an orbit, O ( · ), of the group action. The collection of these orbits, the mo dulo space of the equiv alen t classes of orbits P /G , is called the base space and has the structure of a smo oth manifold when the action is free. The triple ( P , P /G, π φ ), where π φ : P → P /G is the canonical pro jection, has the structure of a principal bundle with structure group G when the action is free (for free actions, a cross-section of this bundle allows one to asso ciate with each p oin t, p ∈ P , on the manifold a unique pair ([ p ] , g ) where [ p ] ∈ P /G is called the base coordinate and g ∈ G is called the fibre co ordinate). When the action is not free, the problem b ecomes m uc h more inv olv ed, but similar ideas can b e developed with careful treatmen t. An inv ariant v ectorfield on P induces a well defined unique v ectorfield on the base space P /G . Th us the flow of suc h a v ectorfield will carry orbits to orbits. Th us the flo w an inv arian t v ectorfield can b e projected on to the base space P /G and the group G . The pro jection onto G dep ends on the cross section in a unique w a y . This splitting of the flo w induces a corresp onding splitting of the system into one that is evolving on the Lie group and one that is ev olving on the base space. Theorem 3.2 forms the crux of this decomp osition and presents tw o v ector fields on equiv alence classes - one in the quotient space (base space) arising from the bundle structure, and the other due to the group action at any give p oin t on the manifold. This feature has not b een illustrated in an y existing literature so far. The mathematical structure presen ted in the previous paragraph can naturally b e applied to observ er design for systems evolving on a manifold. An observ er can b e designed for the tw o subsystems individually . F or the subsystem evolving on the Lie group, w e define a group action on the measurement as well. A constructiv e pro cedure for observer design is laid down for this subsystem. In particular, we detail a gradient based observ er design tec hnique stemming from a c hoice of suitable cost function, that makes the error dynamics autonomous. How ever, for the system ev olving on the base space, the metho dology is not uniform and is implemented on a case by case basis. W e do not examine this here. The initial ideas b ehind this theory of symmetry-preserving observers appear in [ 14 ]. W e w ork in a similar setting as [ 14 ]. The same problem, if the configuration manifold P itself is a Lie group, is presented in [ 15 ]. They , ho w ev er, adopt a very differen t methodology from us. They use a method inspired from observ er design for linear systems, like the idea of the Luenberger observ er, in whic h they augmen t the v ector field gov erning the original system with a correction (gain and inno v ation) 4 A. A. JOSHI, D.H.S. MAITHRIP ALA AND R. N. BANA V AR term to ha v e desirable c haracteristics of the error dynamics, and rely on linearization of the system to design the observ er gains to obtain desirable c haracteristics. In [ 14 ], the natural decomposition of the system due to symmetry is stated briefly , without pro ofs or muc h geometric insight. The work of Mahon y et. al. [ 45 , 53 ] is in the same setting as ours and [ 41 ] applies the metho dology in [ 45 ] to design an observ er for the SLAM problem when the group action is tr ansitive. If in our setting the group action is assumed to b e transitive, we observ e that the cross-section reduces to a single p oint on the configuration manifold, and there is exactly one orbit. Hence given a base p oin t on the manifold, the rest of the manifold can b e identified with the Lie group.(Consider the action of G = SO (3) on P = S 2 . The action is transitiv e i.e. giv en an y elemen t p ∈ P w e can obtain an y other elemen t p 0 ∈ P via a suitable rotation i.e. the action of a suitable elemen t in SO (3). Mathematically , giv en any p and p 0 in S 2 , there exists g ∈ SO (3) (non-unique) suc h that Rp = p 0 , see for example, Giv en’s rotations [ 56 ]. Hence, just one element of P suffices to describ e the en tire space P based on the action of SO (3).) It therefore essen tially reduces to observ er design on a Lie group, a particular case of the methodology w e prop ose. However, al l gr oup actions may not always b e tr ansitive. If the gr oup action is not tr ansitive, ther e is the formation of quotient manifold and orbit sp ac e which we highlight in this curr ent work. The tw o examples w e present highligh t many aspects of the underlying machin- ery . In the first one, the action is of SO (3) on R 3 \ { 0 } . This action is not free and has a non-trivial isotrop y subgroup. W e display the decomp osition of R 3 \ { 0 } in to the base and fibre co-ordinates, and the decomp osition of its tangent space in to the horizon tal and vertical component. These demonstrations are instructiv e since the non-trivial isotropy subgroup makes the problem inv olv ed. W e pro ceed to analyse kinematics of an object whose tra jectory evolv es on R 3 \ { 0 } . W e conclude b y sho wing how the well known problem of tracking the ob ject using range and b earing measuremen ts falls into our geometric structure of base and fibre co ordi- nates. The second example concerns the SLAM problem. Briefly , the problem here in volv es a vehicle in an unkno wn en vironmen t and the goal is to create a map of the en vironment and concurrently determine the location of the v ehicle relativ e to the en vironment. SLAM has receiv ed significant atten tion in literature [ 2 , 21 , 25 , 27 , 41 ]. W e b egin with the geometric structure in tro duced in [ 41 ], and proceed to study it in greater depth. The action of the Lie group on the configuration space in the SLAM problem is a free action, which leads to the formation of the the principal fibre bundle structure. W e present the decomp osition of the manifold into base and fibre co ordinates and sho w that this problem admits a global cross-section. Studying the decomp osition of the tangen t space in to v ertical and horizon tal spaces leads us to the decomp osition of the SLAM kinematics system in to tw o smaller subsystems. This examination of the geometric structure has not b een elaborated in literature b efore. The sub-system evolving on the base space is observ able, but the one evolv- ing on the Lie group is not observ able (this observ ation is made in [ 37 , 41 , 55 ]). W e end by sho wing that if we in tro duce a set of non-collinear but kno wn landmarks, we can design an observ er for the group using a known tec hnique for observ er design on SE (3) [ 28 ]. The pap er is organised as follo ws. Section 2 takes a lo ok at the fibre bundle structre, and highlights the decomp osition of the manifold in to base and fibre co- ordinates, created by the Lie group. These concepts are illustrated by showing an example of the action of SO (3) on R 3 \ { 0 } . Section 3 addresses how equiv ariant EXPLOITING SYMMETR Y IN OBSER VER DESIGN 5 con trol systems decomp ose in the presence of the preceding geometric structure in to t w o smaller subsystems. Section 4 details a method to design an observer on a Lie group. Section 5 concludes by presen ting examples highligh ting some of the dev elopments in previous sections. 2. Fibre Bundle Structure. In this section we briefly in tro duce the reader to the mathematical to ols that w e employ in the rest of the pap er. Let P b e a smo oth manifold of dimension n P , G be a n G dimensional connected Lie group, with I being the iden tity elemen t, and let G b e its Lie algebra. In what follo ws we will summarize sev eral well known results that are crucial to this w ork such as group actions, orbit spaces, infinitesimal generators and inv ariance under the group action. 2.1. Group actions and orbit spaces. F or any h ∈ G , let L h : G → G denote the left multiplication. Let φ : G × P → P b e a prop er, constant rank, left action 1 of G on P and let X P denote the set of smo oth vector fields on P . W e will frequen tly use the notation g · p : = φ ( g , p ). W e distinguish b et ween t w o maps - φ p ( · ) : G → P and φ g ( · ) : P → P that are associated with φ ( · , · ) as follo ws: φ g ( p ) : = φ ( g , p ) ∀ g ∈ G and φ p ( g ) : = φ ( g , p ) ∀ p ∈ P . The orbit of φ through p is defined to b e the set of p oints O ( p ) : = { φ g ( p ) : g ∈ G } . Definition 2.1. W e tak e the follo wing terminology from [ 49 , Chapter 9]. 1. The group action is fr e e if it has no fixed points, that is φ g ( p ) = p implies g = I or equiv alently , if for each p ∈ P , g 7→ φ g ( p ) is one-to-one. 2. The group action is tr ansitive if for all p 1 , p 2 ∈ P there exists g ∈ G suc h that p 2 = φ g ( p 1 ). The manifold is therefore one single orbit of the group. 3. The group action is pr op er if the mapping G × P 3 ( g , p ) 7→ ( p, φ ( g, p )) ∈ P × P is prop er. Since the orbits are equiv alence classes w e will also denote O ( p ) as G [ p ] 2 . Let P /G denote the space of all orbits of φ with π φ : P → P /G denoting the canonical pro jection map. That is, π φ ( p ) = G [ p ]. W e will distinguish b et w een O ( p ) and G [ p ] as follows : w e will view O ( p ) as a collection of p oin ts in P i.e. a subset of P and G [ p ] as an element of P /G . These elements can be visualised in Figure 1 which has b een inspired from [ 49 , Figu re 10.5.1]. Giv en ζ ∈ G , the infinitesimal gener ator of the action is the vector field ζ P ∈ X P giv en by ζ P ( p ) : = d dt t =0 φ exp ζ t ( p ) = T e φ p · ζ ∀ p ∈ P Note that the flow of ζ P is Φ t ζ P ( p ) : = φ exp ζ t ( p ), where exp ζ t ∈ G ∀ t ∈ R . Since T e φ p is linear it follows that ( ζ + η ) P = ζ P + η P , ( α ζ ) P = α ζ P . 1 for a righ t action, all results can be derived in an analogous fashion 2 Given a smooth manifold P and a Lie group G , w e will denote the orbit of p under G (with left action) as G [ p ] and under right action as [ p ] G . In particular, the smo oth manifold P may itself be a Lie group, and G may be a Lie subgroup of P . 6 A. A. JOSHI, D.H.S. MAITHRIP ALA AND R. N. BANA V AR p g · p h · p π π Base space P /G T otal space P Orbit O ( p ) Fibre G [ p ] Figure 1. Fiber bundle, pro jection, base space and orbits By definition we also ha v e (A d g ζ ) P ( p ) = T e φ p · Ad g ζ . Th us (A d g ζ ) P ( φ g ( p )) = T e φ φ g ( p ) · Ad g ζ = d ds s =0 φ ( g exp ( ζ s ) g − 1 , φ ( g , p )) = d ds s =0 φ ( g exp ( ζ s ) , p ) = d ds s =0 φ g ◦ φ exp ( ζ s ) ( p ) = T p φ g · T e φ p · ζ . This shows that T p φ g · ζ P ( p ) = T p φ g · ( T e φ p · ζ ) = (A d g ζ ) P ( φ g ( p )) 6 = ζ P ( φ g ( p )) , (1) and hence that in general ζ P is not a φ - inv ariant v ector field. Differen tiating this expression it also follows that − [ η P , ζ P ] = [ η , ζ ] P , and th us for left actions the assignment ζ → ζ P is a Lie algebra an timorphism and the subspace of v ectorfields X G : = { ζ P : ζ ∈ G } is a Lie-subalgebra of the space of v ectorfields X on P . Since this distribution is in v olutiv e, it is integrable. Since it is tangen t to the orbits at every p oin t of the orbit these integral manifolds are in fact the orbits of the action. The space T p O ( p ) = X G ( p ) is called the vertic al sp ac e of the tangent space T p P of P at p . Let G p ⊂ G b e the isotropy subgroup of p . That is let G p : = { g ∈ G : g · p = p } . The isotrop y subgroup can b e visualised in Figure 2 . Then w e see that G g · p = g G p g − 1 and that ζ P ( p ) = 0 for all ζ ∈ G p : = T e G p . Hence w e ha v e that the X G is rank (dim( G ) − dim( G p )) at p . The integral submanifolds of X G coincide with the EXPLOITING SYMMETR Y IN OBSER VER DESIGN 7 g h f g · p = p h · p = p f · p = p G p I I · p = p G Figure 2. Isotrop y subgroup of p , G p ⊂ G orbits of the group action. When the action is prop er these in tegral manifolds are guaran teed to b e embedded submanifolds. The properness also implies that P /G is Hausdorff and hence is a smo oth manifold of dimension dim( P ) − (dim( G ) − dim( G p )) with resp ect to the usual quotient top ology . This intutiv e picture is summarised in the following result. Theorem 2.1 ([ 26 , Theorem 2.3.3]) . If the action φ : P × G → P is pr op er and c onstant r ank then e ach π − 1 φ ( G [ p ]) is a close d emb e dde d submanifold of P of dimen- sion (dim( G ) − dim( G p )) . F urthermor e P /G is a smo oth manifold of dimension r = (dim( P ) − (dim( G ) − dim( G p ))) . No w we mov e to wards decomp osing P in to the base and fibre co ordinate. T o that end, we present the definitions of the maps that will yield the co ordinates, and then provide insight in to how we obtain the co ordinates. Definition 2.2. Define σ P : P /G → P to be a map that assigns to every element G [ p ] ∈ P /G , a p oin t on the fib er O ( p ) in a smo oth fashion. That is σ P is smo oth and π φ ◦ σ P = id P /G . Suc h a σ P is called a glob al smo oth cr oss se ction of ( P , P /G, π φ ) . Assumption 2.1. W e assume that suc h a σ P exists. Definition 2.3. Based on the ab ov e fact, w e define γ σ P : P → S z ∈ σ P ( P /G ) G/G z suc h that P 3 p 7→ [ g ] G σ P ( G [ p ]) ∈ G/G σ P ( G [ p ]) suc h that ( 2 ) holds for all g ∈ [ g ] G σ P ( G [ p ]) . In other words, γ σ P ( p ) := { g ∈ G : p = g · σ P ( G [ p ]) } . Note that asso ciated with the section σ P ( · ) there exists for ev ery p ∈ P a g ∈ G suc h that p = φ g ( σ P ( G [ p ])) = φ σ P ( G [ p ]) ( g ) = : g · σ P ( G [ p ]) (2) Since p = φ g ( σ P ( G [ p ])) = φ g h ( σ P ( G [ p ])) for all h ∈ G σ P ( G [ p ]) w e see that the g ∈ G that satisfies the ab o v e relationship is unique only up to a right multiplication b y an element of G σ P ( G [ p ]) . That is if g p ∈ G is suc h that p = φ g p ( σ P ( G [ p ])) and [ g p ] G σ P ( G [ p ]) : = g p h : h ∈ G σ P ( G [ p ]) then [ g p ] G σ P ([ p ]) ∈ G/G σ P ([ p ]) can b e uniquely iden tified with p ∈ O ( p ). Th us we see that there exists a unique [ g p ] G σ P ( G [ p ]) ∈ G/G σ P ( G [ p ]) suc h that ( 2 ) holds for all g ∈ [ g p ] G σ P ( G [ p ]) and hence that the cross 8 A. A. JOSHI, D.H.S. MAITHRIP ALA AND R. N. BANA V AR p g G [ p ] γ σ P π φ σ P P P /G G (a) Section assignment for the free group action p [ g ] G σ P ( G [ p ]) G [ p ] γ σ P π φ σ P P P /G G g (b) Section assignment for the general case Figure 3. Section section σ P allo ws us to iden tify p oin ts in G [ p ] = O ( p ) with points in G/G σ P ([ p ]) in a unique wa y . Observe that σ P ( G [ φ h ( p )]) = σ P ( G [ p ]) for all h ∈ G . Thus using the expression ( 2 ) we see that γ σ P ( φ h ( p )) = ¯ L h γ σ P ( p ) (3) where G/G z 3 [ g ] G z 7→ ¯ L h ([ g ] G z ) := { h · g 0 : g 0 ∈ [ g ] G z } = [ hg ] G z for any z ∈ P . That is the following comm utativ e diagram holds. P P G/G σ P ( G [ p ]) G/G σ P ( G [ p ]) φ h γ σ P γ σ P ¯ L h Also observe that γ σ P ( σ P ( G [ p ])) = [ I ] G σ P ( G [ p ]) . Remark 2.1. In summary , given an y p ∈ P , w e iden tify it using z : = σ P ( p ) and [ g p ] G z : = γ σ P ( p ) suc h that p = g · z for all g ∈ [ g p ] G z . The concept of the section can b e visualised in Figure 3a for the free action and Figure 3b for the general case. Remark 2.2. Notice that the map γ σ P dep ends on the cross section σ P : P /G → P . In the sp ecial case where the action is transitiv e picking the cross section simply amoun ts to iden tifying a particular p oin t p σ ∈ P and then w e see that P ' G/G p σ . Definition 2.4. The co ordinate σ P ( p ), or equiv alently G [ p ], is called the base co ordinate of p while [ g ] G σ P ( G [ p ]) is called the fibre co ordinate of p . Remark 2.3. If the action φ : P × G → G is free then the bundle ( P , G, π φ ) is a principal fibre bundle [ 34 ]. Let us giv e some more attention to the case of the free action and the transitiv e action. If the action of G on P is free, then for every p ∈ P , there exists a unique g ∈ G suc h that ( 2 ) holds, that is, p = g · σ P ( G [ p ]) (4) This leads to the definition of γ σ P : P → G as γ σ P ( p ) : = g where g satisfies ( 4 ). The relation ( 3 ) is simplified to γ σ P ( φ h ( p )) = L h ( γ σ P ( p )). EXPLOITING SYMMETR Y IN OBSER VER DESIGN 9 If the action of G on P is transitiv e, the entire manifold is a single orbit of the group. Therefore, we can pic k arbitrary p σ ∈ P suc h that for any p ∈ P , there exists a g ∈ G suc h that p = φ g ( p σ ) (5) This immediately yields a choice of section as σ P ( p ) = p σ for all p ∈ P , since the base space consists of a single p oin t. Observe that given any h ∈ G p σ , g h also satisfies ( 5 ). This leads to the definition of γ σ P : P → G/G p σ as γ σ P ( p ) : = [ g ] G p σ where g satisfies ( 5 ). 2.2. Decomp osition of T angen t Space. The group action leads to the decom- p osition of the tangent space. Let us lo ok at the case of free group action first, since it will natually lead us to the case when the group action is not free. At an y p oin t p ∈ P , T p P decomp oses in to tw o complementary vector spaces - the v ertical space, denoted V er p ( P ) and horizontal space, denoted Hor p ( P ). The ver- tical space(V er p ( P )) at eac h p oin t is tangent space to the orbit passing through that p oin t, and is therefore is isomorphic to the Lie algebra of G . It is also the k ernel of T p π φ . The horizontal space (Hor p ( P )), is non-unique and can be c hosen b y the user to satisfy Hor p ( P ) L V er p ( P ) = T p P and Hor g · p ( P ) = T p φ g Hor p ( P ). It can b e easily shown that ev ery point, T p γ σ P annihilates horizontal v ectors and T p π φ annihilates v ertical vectors, and T G [ p ] σ P is a bijection b et ween T G [ p ] P /G and Hor σ P ( p ) ( P ). F or more details, see [ 34 ]. Pro ceeding to the case when the group action is not free, the v ertical and hori- zon tal space still hav e the same definition and prop erties. How ev er, it is instructive to observe that the v ertical space has tw o distinct subspaces. Let a basis for the Lie algebra of G b e B 1 = { b 1 , b 2 , . . . , b n } , and let the basis for the Lie algebra of G p b e B 2 = { b 1 , b 2 , . . . , b m } ⊂ B 1 with m < n . Then B 2 represen ts all those directions, going along which, one remains in the stabiliser subgroup G p , therefore, the curves that they induce on P via the tangent map of φ p will hav e zero tangent v ector. Giv en a tangent vector v p ∈ T p P , v er( v p ) will denote its vertical comp onen t and hor( v p ) will denote its horizontal component. An illustration of this is in Figure 4 . W e illustrate some of these ideas using a w ell known example. Example 2.1. Consider the action of the rotation group SO (3) on the elemen ts of R 3 \ { 0 } given b y φ : SO (3) × ( R 3 \ { 0 } ) → ( R 3 \ { 0 } ) ( R , p ) → Rp Define the orbit of p as: O ( p ) = { Rp : R ∈ SO (3) } The collection of all such orbits in R 3 \ { 0 } is the quotien t space: ( R 3 \ { 0 } ) / SO (3) = SO (3) [ p ] : p ∈ R 3 \ { 0 } W e define a projection: π : R 3 \ { 0 } → ( R 3 \ { 0 } / SO (3)) π ( p ) = SO (3) [ p ] Let || · || 2 denote the Euclidean norm on R 3 . Since all the orbits are spheres of radius || p || 2 w e can identify all p oin ts in ( R 3 \ { 0 } ) / SO (3) with p oin ts in R > 0 , and it also helps in defining the section as follows.Choose an arbitrary p oin t in R 3 \ { 0 } . Let that p oin t b e p 0 = (1 , 0 , 0). σ P : ( R 3 \ { 0 } ) / SO (3) → ( R 3 \ { 0 } ) σ P ([ p ]) := || p || 2 (1 , 0 , 0) 10 A. A. JOSHI, D.H.S. MAITHRIP ALA AND R. N. BANA V AR p O ( p ) Base space Hor p ( P ) V er p ( P ) v ∈ T p P v er p ( v ) hor p ( v ) Figure 4. Horizon tal and vertical space decomp osition at an y ar- bitrary p oin t p ∈ P . This corresp onds to a smo oth section of the bundle. || p || 2 (1 , 0 , 0) is then termed the base co-ordinate of p . F act : Giv en an y p ∈ R 3 \ { 0 } there exist Giv en’s rotations R 1 , R 2 ∈ SO (3) such that R 2 p = ( ∗ , ∗ , 0) T and R 1 R 2 p = ( || p || 2 , 0 , 0) T [ 56 , Chapter 3]. T o get the fibre co-ordinate, define γ σ P : ( R 3 \ { 0 } ) → [ z ∈ σ P ( R 3 \{ 0 } ) / SO (3)) SO (3) /G z σ P ( R 3 \ { 0 } ) = { λp 0 : λ ∈ R > 0 } , and for any z ∈ σ P ( R 3 \ { 0 } ), G z = G p 0 . The defi- nition simplifies to γ σ P : ( R 3 \ { 0 } ) → SO (3) /G p 0 defined as γ σ P ( p ) : = [ R T 2 R T 1 ] G p 0 . Th us p = ( || p || 2 , R T 2 R T 1 ) and || p || 2 is called the base co ordinate and [ R T 2 R T 1 ] G p 0 is called the fibre coordinate of p . T o c haracterise the v ertical space at p ∈ R 3 \ { 0 } , w e will find the n ull space of T p π . Consider a smooth curv e r ( t ) R ( t ) e 1 ∈ R 3 \ { 0 } where R ( · ) is a smooth curv e in SO (3) with R (0) = R 1 R 2 , ˙ R (0) = [ R (0)]Ω × ∈ so ( 3 ), and r ( t ) is a smo oth curve in R 3 , r (0) = || p || and ˙ r (0) ∈ R . Then r (0) R (0) e 1 = || p || R 1 R 2 e 1 = p v = ˙ r (0) R 1 R 2 e 1 + || p || ˙ R (0) e 1 = ˙ r (0) R 1 R 2 e 1 + || p || R Ω × e 1 Let ˙ r ( t ) = 0 so that v ∈ T p π . Then it is evident that p T v = 0. Th us, V er p ( R 3 \ { 0 } ) = v ∈ R 3 : p T v = 0 . And w e c ho ose the horizon tal space as Hor p ( R 3 \ { 0 } ) = { λp : λ ∈ R } . Therefore, giv en v ∈ T p ( R 3 \ { 0 } ), ver( v ) = v − ( p T v ) p r 2 and hor( v ) = ( p T v ) p r 2 . 3. Equiv arian t Control Systems. Let P (state-space), U (con trol input), and Y 1 , Y 2 (measuremen ts) b e n P , n U , n Y 1 , n Y 2 - dimensional smooth manifolds resp ec- tiv ely and let X : P × U → T P b e a smo oth map suc h that X ( p, u ) ∈ T p P for all p ∈ P and u ∈ U and H : P → Y 2 is smo oth and onto. Let φ : G × P → P , EXPLOITING SYMMETR Y IN OBSER VER DESIGN 11 ψ : G × U → U b e prop er and constan t rank left actions of G on P and U re- sp ectiv ely , and let ρ : G × Y 1 → Y 1 and ˜ ρ : G × Y 2 → Y 2 b e prop er left actions of G . Define the prop er constan t rank left action τ : G × ( P × U ) → P × U by τ g ( p, u ) = ( φ g ( p ) , ψ g ( u )) = ( φ g × ψ g )( p, u ). Define the section associated to π φ as σ P and additionally define γ σ P asso ciated with σ P . Define P ⊃ K : = σ P ( P /G ). Let y 0 ∈ Y 1 b e fixed and known. Based on these structures, the equations ˙ p = X ( p, u ) , (6) y G = ρ g − 1 ( y 0 ) (7) y K = H ( p ) , (8) define a control system with state evolving on P with control taking v alues in U and the output taking v alues in Y . The 6-tuple ( P , U , Y 1 , Y 2 , X, H ) will b e referred to as a Contr ol System on P . Since the notion of symmetries pla ys an imp ortan t role in our evolution of ideas, we define group actions. Definition 3.1. A smooth onto map H : P → Y 2 is said to b e G - equiv ariant if ˜ ρ g ( H ( p )) = H ( φ g ( p )) for all p ∈ P and g ∈ G . That is if the following comm utativ e diagram holds. P Y 2 P Y 2 H φ g ˜ ρ g H Definition 3.2. The control system ( P, U , Y 1 , Y 2 , X, H ) will b e called a G - equi- v ariant con trol system if the maps X : P × U → T P and H : P → Y 2 are G - equiv ariant. That is, if the following t w o commutativ e diagram holds. P × U T P P × U T P X φ g × ψ g T φ g X P Y 2 P Y 2 H φ g ˜ ρ g H W e no w define pro jection maps on eac h of the spaces to impart a bundle structure to eac h. Let π φ : P → P /G , π ψ : U → U /G , and π τ : P × U → ( P × U ) /G be the resp ectiv e canonical projections. Denote b y G [ p ]( ∈ P /G ) = π φ ( p ) the orbit of the φ action of G through p , G [ u ] = π ψ ( u ) the orbit of the ψ action of G through u ( ∈ U /G ), and G [ p, u ] = π τ ( p, u ) the orbit of the τ action of G through ( p, u ). Note that, in general, G [ p, u ] 6 = ( G [ p ] , G [ u ]) unless ψ g is the identit y map, in which case G [ p, u ] = ( G [ p ] , u ). W e will demonstrate b elo w the known result that the flow of G - equiv ariant con trol systems tak e orbits to orbits. Let p ( t ) : = Ψ X t ( p 0 , u ([0 , t ])) b e the solution of ( 6 ) for a control history u ([0 , t ]). Consider the curve φ g ( p ( t )) for some g ∈ G . Then from G - inv ariance w e hav e d dt φ g ( p ( t )) = T p ( t ) φ g · X ( p ( t ) , u ( t )) = X ( τ g ( p ( t ) , u ( t ))) . Th us we hav e that φ g ( p ( t )) is the solution of X that originates at φ g ( p 0 ) with con trol history ψ g ( u ( · )). Th us it follows that for an y p 0 ∈ P Ψ X t ( τ g ( p 0 , u ([0 , t ]))) = φ g Ψ X t ( p 0 , u ([0 , t ])) ∀ t ≥ 0 , and g ∈ G. 12 A. A. JOSHI, D.H.S. MAITHRIP ALA AND R. N. BANA V AR and hence π φ Ψ X t ( p 0 , u ([0 , t ])) = π φ φ g Ψ X t ( p 0 , u ([0 , t ])) = π φ Ψ X t ( τ g ( p 0 , u ([0 , t ]))) . That is π φ ◦ Ψ X t ( p 0 , u 0 ([0 , t ])) = π φ ◦ Ψ X t ( p 0 , u ([0 , t ])) for all p 0 = φ g ( p 0 ) and u 0 ( · ) = ψ g ( u ( · )) for all g ∈ G and hence that the flo w of G - equiv ariant con trol systems tak e orbits to orbits. W e are no w in a p osition to describ e the evolution on the base space P /G , and present a differential equation on this space. Let us define a smo oth map ¯ X : ( P × U ) /G → T ( P /G ) suc h that the following comm utativ e diagram holds: P × U ( P × U ) /G T P T ( P /G ) π τ X ¯ X T π φ Therefore, ¯ X ◦ π τ = T π φ ◦ X . Claim 3.1. ¯ X thus evaluate d is a wel l define d map, and yields the same r esult irr esp e ctive of the p articular p oint ( p, u ) ∈ P × U on the orbit G [ p, u ] which is chosen at which to evaluate X and T p π φ . Pr o of. Assume that ( φ g ( p ) , ψ g ( u )) is another p oin t on G [ p, u ] for some g ∈ G . Then if we ev aluate ¯ X using this p oint w e hav e ¯ X ( G [ p, u ]) = T φ g ( p ) π φ · X ( φ g ( p ) , ψ g ( u )) = T φ g ( p ) π φ ( T p φ g · X ( p, u )) = T p ( π φ ◦ φ g ) · X ( p, u ). Since π φ ◦ φ g = π φ w e ha v e that ¯ X ( G [ p, u ]) = T p π φ · X ( p, u ). Hence ¯ X is a well defined map. Hence given any G [ p, u ] ∈ ( P × U ) /G , ¯ X ( G [ p, u ]) = T p π φ · X ( p, u ). Since G [ p ]( t ) = π φ ( p ( t )), we hav e that d dt G [ p ] = T p π φ · X ( p, u ) = ¯ X ( G [ p, u ]) , do es not depend on g ∈ G . Recall from Definition 2.3 the map γ σ P : P → S z ∈ σ P ( P /G ) G/G z tak es p 7→ [ g ] G σ P ( G [ p ]) suc h that the relationship ( 2 ) holds. Note that this map dep ends on the cr oss se ction σ P . Also recall that γ σ P ◦ φ h = ¯ L h ◦ γ σ P for all h ∈ G . Remark 3.1. Note that γ σ P represen ts a family of co ordinates on P , whic h when restricted to a single fibre, assigns resp ectiv e points on the modulo space G/G z to ev ery p oin t on that fibre (where z is the image of that fibre under σ P ). See Figure 5 for an illustration. The next lemma presents the differential equation for the evolution of the equiv- alence class γ σ P ( p ). Lemma 3.1. L et z : = σ P ( p ) . The maps σ P ( · ) and γ σ P ( · ) determine the dynamics of γ σ P ( p ) = [ g ] G z as d dt [ g ] G z = T [ I ] G z ¯ L g T z γ σ P X ( z , ψ g − 1 ( u )) − T G [ p ] σ P ( T p π φ · X ( p, u )) (9) wher e g ∈ [ g ] G z . If ψ g is identity, then the dynamics ar e indep endent of the p artic- ular g ∈ [ g ] G z that is chosen. EXPLOITING SYMMETR Y IN OBSER VER DESIGN 13 z φ g p 1 p 2 φ h [ I ] G z [ g ] G z [ hg ] G z γ σ P γ σ P γ σ P Base Space P /G O ( z ) G/G z Figure 5. A ction of γ σ P Pr o of. Let g ( · ) b e such that g ( t ) · z ( t ) = p ( t ) for all time. Cho ose an y elemen t h ∈ G z , then h · z = z which gives h − 1 · z = z , and g h ∈ [ g ] G z . Note that g ∈ [ g ] G z also (if h = I ). Also note that ( φ h ◦ σ ◦ π φ )( p ) = ( σ ◦ π )( p ), since h is the stabiliser of z . Let g 1 ( t ) := g ( t ) h which implies z ( t ) = ( g 1 ( t )) − 1 p ( t ). The rate of c hange of the fibre co ordinate is given b y the vertical comp onen t of the dynamics (after transferring it to the appropriate tangent space via appropriate tangen t maps). Therefore, d dt [ g ] G z = T p γ σ P · ver p ( X ( p, u )) , = T p γ σ P ( X ( p, u ) − hor p ( X ( p, u ))) , Recall that T p π annihilates v ertical v ectors, T G [ p ] σ P is a bijection betw een T G [ p ] P /G and Hor σ P ( p ) ( P ) and T p φ g is used to transp ort horizontal v ectors betw een tangen t spaces. This gives us d dt [ g ] G z = T p γ σ P X ( p, u ) − T z φ g 1 ( T G [ p ] σ P ( T p π φ · X ( p, u ))) , = T p γ σ P T z φ g 1 X ( z , ψ g − 1 ( u )) − T G [ p ] σ P ( T p π φ · X ( p, u )) , = T z ( γ σ P ◦ φ g 1 ) · X ( z , ψ g − 1 ( u )) − T G [ p ] σ P ( T p π φ · X ( p, u )) , Recalling ( 3 ) we see that d dt [ g ] G z = T z ¯ L g 1 ◦ γ σ P · X ( z , ψ g − 1 ( u )) − T G [ p ] σ P ( T p π φ · X ( p, u )) , = T [ I ] G z ¯ L g 1 T z γ σ P X ( z , ψ g − 1 ( u )) − T G [ p ] σ P ( T p π φ · X ( p, u )) 14 A. A. JOSHI, D.H.S. MAITHRIP ALA AND R. N. BANA V AR X ( g − 1 1 · ( p, u )) T g − 1 1 · p φ g 1 φ g 1 γ σ P X ( p, u ) T p γ σ P T p γ σ P · X ( p, u ) g 1 g L h [ g ] G z G z h I T otal space P Lie group G Figure 6. Figure for the proof of Lemma 3.1 . (Arro ws indicate v ectors) See Figure 6 for an illustration of the steps b elo w. Cho osing h = I yields the first part of the prop osition. No w assume that ψ g is identit y . Then ( T [ I ] G z ¯ L g 1 ◦ T z γ σ P ) · X ( z , ψ g − 1 ( u )) = T z ( γ σ P ◦ φ g 1 ) · ( X ( z , ψ g − 1 ( u )) , = T z ( γ σ P ◦ φ g 1 ) · X φ g − 1 1 ( p ) , u , = T z ( γ σ P ◦ φ g 1 ) · X φ h − 1 ◦ φ g − 1 ( p ) , u , = T z ( γ σ P ◦ φ g 1 ) · X ( φ h − 1 ( z ) , u ) , = T z ( γ σ P ◦ φ g 1 ) · ( T z φ h − 1 · X (( z ) , u )) , = T z ( γ σ P ◦ φ g ) · X ( z , u )) , = T z ¯ L g ◦ γ σ P · X ( z , u ) , = T [ I ] G z ¯ L g ( T z γ σ P · X ( z , u )) whic h is independent of the particular h chosen, they are indep enden t of the par- ticular representativ e element in [ g ] G z c hosen. Using a similar method, and noting along the wa y that T p π φ · X ( p, u ) = T z ( π φ ◦ φ g 1 ) · X ( z , u ) = T z π φ · X ( z , u ) it can b e sho wn that T [ I ] G z ¯ L g T z γ σ P T G [ p ] σ P ( T p π φ · X ( p, u )) is independent of the particular h chosen, they are indep enden t of the particular represen tative element in [ g ] G z c hosen. Therefore, the dynamics are independent of the particular h chosen, they are indep enden t of the particular re presentativ e element in [ g ] G z c hosen. Remark 3.2. In observ er design, the con trol u ( · ) are op en lo op since they are giv en to the user and kno wn. Therefore, the kinematics X are essentially a function of time in the second argumen t. ψ g b eing identit y is a v alid function in this case. A similar observ ation has also been noted in [ 14 ] just b efore Definition 2. Often, u ( t ) ma y represent velocity or actuator measurements. W e presen t corollaries to Lemma 3.1 when the action of G on P is free or transitiv e. They are an easy consequence of Lemma 3.1 when w e recall that EXPLOITING SYMMETR Y IN OBSER VER DESIGN 15 T G [ p ] σ P ( T p π φ · X ( p, u )) is a horizontal vector, and T z γ σ P annihilates horizontal v ectors in these cases. Corollary 3.1.1. If the action of G on P is fr e e, defining z : = σ P ( p ) the dynamics of g : = γ σ P ( p ) evolve as d dt g = T I L g ( T z γ σ P · X z , ψ g − 1 ( u ) ) Corollary 3.1.2. If the action of G on P is tr ansitive, defining z : = p σ = σ P ( p ) , the dynamics of [ g ] G z = γ σ P ( p ) evolve as d dt [ g ] G z = T [ I ] G z ¯ L g 1 T z γ σ P · X z , ψ g − 1 1 ( u ) wher e g 1 ∈ [ g ] G z . Assumption 3.1. W e will assume that either the map H is G -equiv arian t or that H is actually a map defined only on K ⊂ P , that is, H : K → Y 2 . Remark 3.3. Note that w e ha v e c hanged the definition of H slightly , from what it w as earlier in ( 8 ), and the b oth can b e reconciled by making minor technical c hanges. If H is restricted to K then w e directly get a measuremen t in volving only the base co ordinate. Else if it is G -equiv ariant, then H ( g − 1 · p ) = H ( σ P ( G [ p ])) = H ( ˜ ρ − 1 g ( p )) giv es us a measurement of the base co ordinate. Com bining the earlier results, we finally hav e the follo wing reduction theorem: Theorem 3.2. The c ontr ol system ( 6 ) – ( 8 ) is e quivalent to the fol lowing system with z : = σ P ( p ) , [ g ] G z = γ σ P ( p ) d dt [ g ] G z = T [ I ] G z ¯ L g T z γ σ P X ( z , ψ g − 1 ( u )) − T G [ p ] σ P ( T p π φ · X ( p, u )) (10) y G = ρ g − 1 ( y 0 ) (11) d dt G [ p ] = ¯ X ( G [ p, u ]) (12) y K = H ( p ) (13) Remark 3.4. W e therefore obtain a differen t w ay to express system ( 6 ) – ( 8 ) as system ( 10 ) – ( 13 ). The plan is to design an observer for this system b y exploiting the symmetry highlighted b y the new wa y of represen tation. Observe that if H is restricted to K then the subsystem whic h evolv es on the base manifold, that is ( 12 ) – ( 13 ), forms a subsystem indep endent of the fib er co ordinate. Then we can design an observer for ( 12 ) – ( 13 ) first and use that to design an observ er for ( 10 ) – ( 11 ). The observ er for ( 12 ) – ( 13 ) is designed on a case by case basis, but for ( 10 ) – ( 11 ) w e present a methodology in the next section. W e present corollaries of Theorem 3.2 for the case when the group action is free or transitive. 16 A. A. JOSHI, D.H.S. MAITHRIP ALA AND R. N. BANA V AR Corollary 3.2.1. If the action of G on P is fr e e, the c ontr ol system ( 6 ) – ( 8 ) is e quivalent to the fol lowing system with z : = σ P ( p ) , g = γ σ P ( p ) d dt g = T I L g ( T z γ σ P · X z , ψ g − 1 ( u ) ) y G = ρ g − 1 ( y 0 ) d dt G [ p ] = ¯ X ( G [ p, u ]) y K = H ( p ) Remark 3.5. When the group action is free, ( 10 )–( 11 ) b ecomes easier to handle since the fib er coordinate ev olves on G instead of G/G z . Corollary 3.2.2. If the action of G on P is tr ansitive, the c ontr ol system ( 6 ) – ( 8 ) is e quivalent to the fol lowing system with z : = p σ = σ P ( p ) and [ g ] G z = γ σ P ( p ) d dt [ g ] G z = T [ I ] G z ¯ L g 1 T p σ γ σ P · X z , ψ g − 1 1 ( u ) y G = ρ g − 1 ( y 0 ) Remark 3.6. When the group action is transitive, c ho osing p σ , makes ( 12 )–( 13 ) mo ot and reduces the problem to that of designing an observ er on the fibres (i.e. the Lie group), that is, designing a filter for ( 10 ) – ( 11 ). This ph ysically corresp onds to the case of the unicycle and rigid b ody attitude observ ation using IMUs considered in [ 45 ] and SLAM with kno wn spatial markers that was considered in [ 41 ]. 4. Gradien t Based Observers for Kinematic Systems on Lie Groups. In this section we present observer design when the system evolv es on a Lie group. This is a restatement of results in [ 45 ], but in our setting, presen ted with the in tention of cementing the ideas that w e discuss. This corresponds to designing an observer for ( 10 ) – ( 11 ). This ph ysically corresp onds to the situations dealt with in [ 45 ],[ 41 ]. Let Φ : G × G → G be group multiplication. W e will assume Φ is a left action, that os, Φ( g 1 , g 2 ) = Φ g 1 ( g 2 ) = g 1 g 2 and let ρ : G × Y → Y b e a proper and free Φ-in v ariant left group action of G on Y , that is ρ ( h, ρ ( g , y )) = ρ (Φ h ( g ) , y ). Let hh· , ·ii : G × G → R be an inner pro duct on the lie algebra. W e consider a system that ev olves according to ˙ g = T I Φ g · ζ ( t ) , (14) y = ρ g − 1 ( y 0 ) , (15) where ζ ( t ) ∈ G is known and y 0 ∈ Y is a constant. This corresponds to ( 10 ) – ( 11 ) where we hav e treated σ P ([ p ]( t )) as an input. The problem w e consider is that of estimating g from the measuremen t of y giv en the information of ζ . W e consider the pre-observer ˙ ˆ g = T I Φ ˆ g · ( ζ − ∆(ˆ g , y )) , (16) ˆ y = ρ ˆ g − 1 ( y 0 ) . ˆ g is termed the estimate, and ∆ is termed the innov ation. The inno v ation will be designed now so that ˆ g conv erges to g . Note that the innov ation is a Lie-algebraic v alued function of the estimate and the measurement. Consider V y ( · , · ) : Y × Y → R suc h that V y ( ρ g ( y 1 ) , ρ g ( y 2 )) = V y ( y 1 , y 2 ) for all g ∈ G and y 1 , y 2 ∈ Y . Also, V y ( y 1 , y 2 ) = V y ( y 2 , y 1 ) for all y 1 , y 2 ∈ Y . This is called a distance function. EXPLOITING SYMMETR Y IN OBSER VER DESIGN 17 Consider the estimation error and the output error giv en resp ectiv ely by e g : = Φ g ( ˆ g − 1 ) , e y : = V y ( ρ g − 1 ( y 0 ) , ρ ˆ g − 1 ( y 0 )) = V y ( ρ e g ( y 0 ) , y 0 ) = : V e ( e g ) . Theorem 4.1. Supp ose that I is a non-de gener ate critic al p oint for V e . Define ζ e ∈ G as (Φ e g ) ∗ d e g V e , · = hh ζ e , ·ii (17) wher e d e g V e is the differ ential of V at e g and (Φ e g ) ∗ denotes the pul lb ack. If ∆( ˆ g , y ) : = − k A d ˆ g − 1 ζ e then ther e exists a nighb ourho o d B of I such that if e g ∈ B then e g c onver ges to I . Pr o of. The first step in the pro of is to sho w that ζ e is indep enden t of g . This is essen tial since we use ζ e in the construction of the observ er. Claim 4.1. ζ e is indep endent of g . Pr o of. W e know that V y ( ρ g − 1 ( y 0 ) , ρ ˆ g − 1 ( y 0 )) = V y ( y 0 , ρ g ˆ g − 1 ( y 0 )) = V y ( y 0 , ρ e g ( y 0 )) = V e ( e g ) F or an arbitrary ξ ∈ G , consider the curve c ( s ) = e g exp ( ξ s ) that passes through e g at s = 0 with tangent v ector T I L e g · ξ . Let h· , ·i denote the duality pairing b et ween a co vector and vector. Then ( 17 ) can b e written as hh ζ e , ξ ii = h ( T I L e g ) ∗ d e g V e , ξ i = h d e g V e , e g · ξ i = d ds s =0 V e ( e g exp ( ξ s )) = d ds s =0 V y ( ρ e g exp ( ξ s ) ( y 0 ) , y 0 ) , = d ds s =0 V y ( ρ g ˆ g − 1 exp ( ξ s ) ( y 0 ) , y 0 ) = d ds s =0 V y ( ρ ˆ g − 1 exp ( ξ s ) ( y 0 ) , y ) . The righ t hand side depends only on ˆ g , y and ˆ y for an y ξ thus ζ e dep ends only on ˆ g , y and ˆ y . F rom the definitions of e g and V e w e hav e ˙ e g = Φ ˆ g e g ∆( ˆ g , y ) ˙ V e = D d e g V e , Φ ˆ g e g · ∆( ˆ g , y ) E where Φ ˆ g e g : = T I Φ e g ◦ Ad ˆ g It is now easy to see that the innov ation term ∆( ˆ g , y ) : = − k A d ˆ g − 1 ζ e will yield the time inv arian t error dynamics ˙ e g = T I Φ e g ( − k ζ e ) , ˙ V e = − k hh ζ e , ζ e ii ≤ 0 (18) F rom the definition of V e it is clear that V e ( I ) = 0. F urther since w e assume that I is a non-degenerate critical p oin t for V e , then I is an isolated critical p oint [ 50 , Corollary 2.3]. Thus there exists a nighbourho od B of I such that if e g ∈ B then the condition ˙ V e ≤ 0 in ( 18 ) ensures that e g con verges to I . 18 A. A. JOSHI, D.H.S. MAITHRIP ALA AND R. N. BANA V AR Let us conclude this section with an example. Example 4.1. Consider the case of attitude kinematics with G = SO (3) measured b ody angular velocities, Ω ∧ ∈ so ( 3 ), where the kinematic equations are ˙ R = R Ω ∧ where w e let ( · ) ∧ : R 3 → so ( 3 ) b e the canonical isomorphism betw een the t w o. The measured outputs are tw o non-collinear inertial directions e 3 and e 2 in the b ody frame. e 2 and e 3 are assumed to b e known. Y = S 2 × S 2 ⊂ R 3 × R 3 and y = ( y 2 , y 3 ) = ( R T e 2 , R T e 3 ) = ( ρ R T ( e 2 ) , ρ R T ( e 3 )) where ρ : SO (3) × S 2 → S 2 is a left action that is simply given b y multiplication b y R . T able 1 contains a summary of the structure. P = R 3 \ { 0 } G = SO (3) Y = S 2 × S 2 T able 1. Summary of Structure Let the pre-observer, as per ( 16 ), b e ˙ R = R (Ω ∧ − ∆) (19) T o complete the observ er design, c ho ose a cost function V y ( y , ˆ y ) : = || R T e 3 − ˆ R T e 3 || 2 + || R T e 2 − ˆ R T e 2 || 2 = || e 3 − R ˆ R T e 3 || 2 + || e 2 − R ˆ R T e 2 || 2 , = || e 3 − E e 3 || 2 + || e 2 − E e 2 || 2 = : V e ( E ) Let c ( s ) = E exp ( ξ ∧ s ) h ( T L E ) ∗ d E V e , ξ i = h d E V e , E ξ ∧ i = d ds | s =0 V e ( E exp ( ξ ∧ s )) = 3 X k =2 d ds s =0 || e k − E exp ( ξ ∧ s ) e k || 2 , = 3 X k =2 d ds s =0 || R T e k − ˆ R T exp ( ξ ∧ s ) e k || 2 = 3 X k =2 d ds s =0 || y k − ˆ R T exp ( ξ ∧ s ) e k || 2 = 3 X k =2 d ds s =0 y T k y k − 2 y T k ˆ R T exp ( ξ ∧ s ) e k + e T k e k = 3 X k =2 − 2 y T k ˆ R T ξ ∧ e k = 3 X k =2 tr( − 2 e k y T k ˆ R T ξ ∧ ) = 3 X k =2 tr − 2 ˆ Ry k e T k T ξ ∧ EXPLOITING SYMMETR Y IN OBSER VER DESIGN 19 If the iner product on G is the F robenius inner pro duct, w e get (after considering the skew symmetric part of − 2 e ∧ k ˆ Ry k in order to get an elemen t in G ), h ( T L E ) ∗ d E V e , ξ i = 3 X k =2 tr − ˆ Ry k e T k + e k y T k ˆ R T ξ ∧ whic h yields ζ e = 3 X k =2 − ˆ Ry k e T k + e k y T k ˆ R T ∆ = − k 3 X k =2 − y k e T k ˆ R + ˆ R T e k y T k (20) Substitute ( 20 ) into the pre-observ er ( 19 ) to get the final observ er structure. 5. Examples. In this section w e present tw o examples to illustrate some of the concepts dev elop ed so far. W e contin ue example 2.1 and show its relev ance to a target tracking problem. In the second example, we sho w how the SLAM problem falls into our framew ork. It helps us emphasise the case of the free group action. 5.1. T arget trac king problem. In this example, w e consider a p oin t object whose tra jectory p ( · ) evolv es on R 3 \ { 0 } . W e will first lo ok at ho w the kinematics decom- p ose into t w o subsystems as p er the base and fib er spaces, and then lo ok at giving a geometric interpretation to the w ell known problem of target trac king using range and b earing measuremen ts. 5.1.1. De c omp osition of a kinematic system. W e contin ue example 2.1 to analyse the decomposition of kinematics. T able 2 pro vides a summary of the structure in the problem. P = R 3 \ { 0 } G = SO (3) φ ( g , p ) = g p T able 2. Summary of Structure Let us now look at ho w the kinematics of its motion split as per the base and fibre co-ordinate structure. Define R 3 t 7→ r ( t ) := || p ( t ) || 2 ∈ R . Let R ( · ) b e a smo oth curv e in SO (3) be suc h that p ( t ) = r ( t ) R ( t ) p 0 (using Given’s rotations [ 56 ]). Let R 3 t 7→ v ( t ) : = ˙ p ( t ) ∈ R . Assume further that ˙ R ( t ) = R Ω( t ) ∧ for some Ω( t ) ∈ R 3 and recall that ( · ) ∧ : R 3 → so ( 3 ) is the canonical isomorphism b etw een the t wo. W e shall suppress the explicit time argumen t henceforth to keep the notation terse. ˙ p = v = ˙ r Rp 0 + r ˙ Rp 0 = ˙ r Rp 0 + r R Ω × p 0 20 A. A. JOSHI, D.H.S. MAITHRIP ALA AND R. N. BANA V AR Recall from example 2.1 , that the base co-ordinate of p is r p 0 and the fibre co-ordinate is [ R ( t )] G p 0 . Recall further that v er p ( v ) = ˙ r Rp 0 + r R Ω × p 0 − r ( Rp 0 ) T ( ˙ rRp 0 + r R Ω × p 0 ) r Rp 0 r 2 = r R Ω × p 0 hor p ( v ) = ˙ r Rp 0 Therefore, we see ho w the kinematics splits in to tw o smaller subsystems. The ev olution of the horizontal component depends only on the base co ordinate, there- fore it b ecomes an indep enden t subsystem in itself. Once a solution to the horizontal subsy etm is obtained, one can proceed to solving the vertical subsystem. W e no w sho w ho w giv en a range-bearing measurement mo del, one can infer the base and fib er co ordinate and thus reconstruct the total state. 5.1.2. Applic ation given r ange and b e aring me asur ements. Supp ose that there is a target trac king problem in whic h the user is in terested in trac king the particle whose p osition is giv en by p ( · ) as a function of time, and measurements are a v ailable to use in the form of range and b earing y 1 = r y 2 = θ 1 y 3 = θ 2 where θ 1 and θ 2 are mark ed in Figure 7 (they are resp ectively the p olar and azim uthal angles in spherical p olar co-ordinates). This is a typical range and b ear- ing measurement model, used in v arious problems like submarine target tracking, ground target tracking to name a few applications, and readers are redirected to [ 9 , 19 , 40 , 46 ] for more on this. Define R 0 : = cos( θ 1 ) − sin( θ 1 ) 0 sin( θ 1 ) cos( θ 2 ) cos( θ 1 ) cos( θ 2 ) − sin( θ 2 ) sin( θ 1 ) sin( θ 2 ) cos( θ 1 ) cos( θ 2 ) cos ( θ 2 ) Then the base co-ordinate is directly giv en by the first measurement y 1 and the fibre co-ordinate is given b y [ R 0 ] G p 0 . This giv es us a geometric interpretation of the well known range b earing measurement problem. 5.2. SLAM. 5.2.1. Mo del ling. W e recall the mathematical mo delling of the SLAM problem from [ 41 ]. Assume that there is a fixed inertial frame represen ted b y I and there is a b ody frame represented by B . Assume that there are N fixed but unknown landmarks represented b y L i ∈ R 3 for i = 1 , 2 , . . . N in I . The L i are measured in B as l i ∈ R 3 . Assume that S = R r 0 1 ∈ SE (3) represents the Euclidean transformation b et ween B and I . Then Rl i + r = L i . The goal is to observ e S and all L i . EXPLOITING SYMMETR Y IN OBSER VER DESIGN 21 q θ 1 θ 2 q sin( θ 1 ) x y z Figure 7. Radar T o easily represent the action of SE (3) on R 3 , we will define E 3 : = l 1 : l ∈ R 3 , ¯ R 3 : = l 0 : l ∈ R 3 E : = N times z }| { E 3 × E 3 × · · · × E 3 , ¯ R : = N times z }| { ¯ R 3 × ¯ R 3 × · · · × ¯ R 3 Eac h l i (or L i ) will b e denoted as elements of E 3 as ¯ l i : = l i 1 , ¯ L i : = L i 1 = ⇒ S ¯ l i = ¯ L i The state space is P = SE (3) × E . Hence p : = ( S, ¯ L 1 , ¯ L 1 , . . . , ¯ L N ) ∈ P . The Lie group is G = SE (3) and the group action φ (a free righ t action) is SE (3) × P 3 ( g , p ) 7→ φ ( g , p ) := ( g − 1 S, g − 1 ¯ L 1 , g − 1 ¯ L 2 , . . . , g − 1 ¯ L N ) ∈ P The measurement is P 3 p 7→ H ( p ) : = ( ¯ l 1 , ¯ l 2 , . . . , ¯ l N ) = ( S − 1 ¯ L 1 , S − 1 ¯ L 2 , . . . , S − 1 ¯ L N ) ∈ E (21) The input space U is se ( 3 ) × ¯ R . Define the action of the group on the input space, G × U 3 ( g , v ) 7→ ψ ( g , v ) : = v ∈ U . The kinematics of SLAM are ˙ p = X ( p, v ) with X ( p, v ) : = ( S V , S ¯ v 1 , ..., S ¯ v N ) and v : = ( V , ¯ v 1 , . . . , ¯ v N ) ∈ U (22) where v is termed the v elo cit y and is assumed to be measured. It is easy to v erify that T p φ g X ( p, v ) = X ( φ g ( p ) , ψ g ( v )). The stru cture is tabulated in T able 3 . P = SE (3) × E G = SE (3) Y = E T able 3. Summary of Structure 22 A. A. JOSHI, D.H.S. MAITHRIP ALA AND R. N. BANA V AR 5.2.2. Ge ometry. Let us now inv estigate the geometry b ehind the modelling of the problem. The orbit of p ∈ P is O ( p ) = ( g − 1 S, g − 1 ¯ L 1 , g − 1 ¯ L 2 , . . . , g − 1 ¯ L N ) : g ∈ SE (3) The quotient space space thus formed is P /G = { G [ p ] : p ∈ P } . Define P 3 p 7→ π ( p ) : = G [ p ] ∈ P /G . Cho ose a W ∈ se (3), then T I φ p · W = ( − W S, − W ¯ L 1 , . . . , − W ¯ L N ) . Th us T p O ( p ) = { T I φ p · W : W ∈ se (3) } . Consider a smooth curv e β ( t ) := φ p ( g ( t )) where g ( · ) is a smooth curv e on SE (3) with g (0) = I , ˙ g (0) = W . Observ e that ˙ β (0) = ( − W S, − W ¯ L 1 , . . . , − W ¯ L N ) Since π ( β ( t )) = G [ p ] then ˙ β (0) ∈ k er T p π . Hence V er( p ) = ( − W S, − W ¯ L 1 , . . . , − W ¯ L N ) : W ∈ se (3) It can b e seen that V er( p ) = T p O ( p ). One choice for horizon tal space is Hor( p ) = (0 , ¯ v 1 , . . . , ¯ v N ) : ¯ v 1 , . . . , ¯ v N ∈ ¯ R 3 Recall that, to confirm whether this choice is indeed a v alid choice for a hor- izon tal space, w e need to verify if Hor( g · p ) = Hor( p ) and Hor( p ) ∩ V er( p ) = { 0 } . Since Hor( p ) is the same set for all p , Hor( g · p ) = Hor( p ). Now let v = ∈ Hor( p ) ∩ V er( p ). Then pro ving v = (0 , ¯ v 1 , . . . , ¯ v N ) for some ¯ v 1 , . . . , ¯ v N ∈ ¯ R 3 and v = ( − W S, − W ¯ L 1 , . . . , − W ¯ L N ) for some W ∈ se (3). Therefore, W S = 0 which implies W = 0 since S is inv ertible. Hence v = 0 and Hor( p ) ∩ V er( p ) = { 0 } . Since dim(V er( p )) + dim (Hor( p )) = dim ( T p P ), V er( p ) L Hor( p ) = T p P for this c hoice of Hor( p ). Giv en any v p = ( S V , ¯ v 1 , ¯ v 2 , . . . , ¯ v N ) ∈ P , define W : = − S V S − 1 then v er( v p ) = ( − W S, − W ¯ L 1 , − W ¯ L 2 , . . . , − W ¯ L N ) hor( v p ) = (0 , ¯ v 1 + W ¯ L 1 , ¯ v 2 + W ¯ L 2 , . . . , ¯ v N + W ¯ L N ) Consider a choice of section, P /G 3 G [ p ] 7→ σ P ( G [ p ]) := ( I , S − 1 ¯ L 1 , . . . , S − 1 ¯ L n ) ∈ P and it is easy to observe that π ◦ σ = id P /G . Defining P 3 p 7→ γ σ P ( p ) := S − 1 ∈ SE (3), w e see that p = φ ( γ σ P ( p ) , σ P ( G [ p ])). Define P ⊃ K : = σ ( P /G ) = { I } × E . It is evident that T z K = Hor( z ) for all z ∈ K , implying that K intersects each orbit transv ersally . Therefore, we can identify any p ∈ P with • S ∈ G (or equiv alently , S − 1 ∈ G ), whic h is the fibre co ordinate and • z : = ( I , S − 1 ¯ L 1 , . . . , S − 1 ¯ L n ) ∈ K , which is the base co ordinate. K is representativ e of the base manifold, and therefore, SLAM admits a global cross-section, whic h greatly simplifies the pro cess of represen ting a p oin t in base and fibre co ordinates. 5.2.3. K inematics and Observer Design. The SLAM kinematics and measurement in ( 22 ), ( 21 ) form a con trol system, which decomp oses as as follows in ligh t of the geometric structure highlighted ab ov e ˙ z = (0 , − V S − 1 ¯ L 1 + ¯ v 1 , . . . , − V S − 1 ¯ L N + ¯ v N ) y K = H ( p ) d dt ( S − 1 ) = − V S − 1 The kinematics of the fib er co ordinate S can equiv alently b e written as ˙ S = S V . The dynamics of the base coordinate z are go verned by the horizon tal components of EXPLOITING SYMMETR Y IN OBSER VER DESIGN 23 the kinematic v ector field while that of the fiber co ordinate are go verned b y the ver- tical comp onen t. The problem therefore decomp oses into t wo smaller indep enden t subsystems. The measurement y K directly yields the base co ordinate since ( I , H ( p )) = z . There is how ever a lack of a measurement of the fib er co ordinate. This can b e explained by the fact that SLAM problem thus mo delled, is not fully observ able; it can only b e observ ed upto a Euclidean transformation [ 55 , 41 , 37 ]. T o fill this gap, we will introduce new measuremen ts to construct an observer for the fiber co ordinate (although these measuremen ts hav e b een giv en a physical justification, they are not a v ailable to the user in conv entional applications). How- ev er, since our pap er fo cusses on exploiting geometric structure in the design of observ ers, we go ahead with mo difying the traditionally kno wn SLAM problem, so that w e can design an observ er for the fib er co ordinate. T o this end, introduce kno wn and fixed L i ∈ R 3 for i = 1 , 2 , . . . , N and ¯ L i : = L i 1 ( L i is kno wn for all i as opp osed to L i whic h was unknown). Define the measurement y G : = ( S − 1 ¯ L 1 , S − 1 ¯ L 2 , . . . , S − 1 ¯ L N ) Supp ose that L i for i = 1 , 2 , . . . , N satisfy Assumption 1 in [ 28 ], whic h is a techni- cal assumption similar to non-collinearity in the Example 4.1 useful while pro ving observ er conv ergence. Then, utilising the measurement y G , an observer can b e designed for the fib er co ordinate S as p er the metho dology in [ 28 ]. A c kno wledgmen ts. The authors would like to thank Debasish Chaterjee, Na vin Khaneja, Amit Sany al and Srikan t Sukumar for helpful discussi ons. A part of the third author’s work w as supp orted b y a MA TRICS fellowship from the Department of Science and T ec hnology . REFERENCES [1] D. Auroux and S. Bonnab el, Symmetry-based observers for some water-tank problems , IEEE T r ansactions on A utomatic Contr ol , 56 (2011), 1046–1058. [2] T. Bailey and H. Durran t-Whyte, Sim ultaneous localization and mapping (slam): Part I I , IEEE R ob otics A utomation Magazine , 13 (2006), 108–117. [3] G. Baldwin, R. Mahon y and J. T rumpf, A nonlinear observer for 6 dof pose estimation from inertial and b earing measurements , in 2009 IEEE International Confer ence on R ob otics and A utomation , 2009, 2237–2242. [4] G. Baldwin, R. Mahony, J. T rumpf, T. Hamel and T. Cheviron, Complementary filter design on the sp ecial euclidean group se(3) , in 2007 Eur op e an Control Confer ence (ECC) , 2007, 3763–3770. [5] A. Barrau and S. Bonnabel, Intrinsic filtering on lie groups with applications to attitude estimation , IEEE T r ansactions on A utomatic Contr ol , 60 (2015), 436–449. [6] A. Barrau and S. Bonnab el, The inv arian t extended kalman filter as a stable observer , IEEE T r ansactions on A utomatic Contr ol , 62 (2017), 1797–1812. [7] A. Barrau and S. Bonnab el, Three examples of the stabilit y properties of the inv ariant ex- tended kalman filter , IF A C-Pap ersOnLine , 50 (2017), 431 – 437, 20th IF AC W orld Congress. [8] A. Barrau and S. Bonnabel, Inv arian t kalman filtering , A nnual Review of Contr ol, Rob otics, and A utonomous Systems , 1 (2018), 237–257. [9] A. N. Bishop, P . N. P athirana and A. V. Savkin, T arget trac king with range and bearing measurements via robust linear filtering , in 2007 3r d International Confer ence on Intel ligent Sensors, Sensor Networks and Information , 2007, 131–135. [10] A. M. Bloch, Dong Eui Chang, N. E. Leonard and J. E. Marsden, Controlled lagrangians and the stabilization of mechanical systems. ii. p oten tial shaping , IEEE T r ansactions on A utomatic Contr ol , 46 (2001), 1556–1571. 24 A. A. JOSHI, D.H.S. MAITHRIP ALA AND R. N. BANA V AR [11] A. M. Bloch, N. E. Leonard and J. E. Marsden, Con trolled lagrangians and the stabilization of mechanical systems. i. the first matc hing theorem , IEEE T r ansactions on A utomatic Contr ol , 45 (2000), 2253–2270. [12] A. M. Bloch, Nonholonomic Me chanics and Contr ol , Springer-V erlag New Y ork, 2015. [13] S. Bonnab el, Left-inv ariant extended kalman filter and attitude estimation , in 2007 46th IEEE Confer enc e on Decision and Contr ol , 2007, 1027–1032. [14] S. Bonnab el, P . Martin and P . Rouchon, Symmetry-preserving observ ers , IEEE T r ansactions on A utomatic Control , 53 (2008), 2514–2526. [15] S. Bonnab el, P . Martin and P . Rouchon, Non-linear symmetry-preserving observers on lie groups , IEEE T r ansactions on A utomatic Contr ol , 54 (2009), 1709–1713. [16] S. Bonnab el, P . Martin, P . Rouchon and E. Sala¨ un, A separation principle on lie groups , IF A C Pr o ce e dings V olumes , 44 (2011), 8004 – 8009, 18th IF AC W orld Congress. [17] S. Bonnable, P . Martin and E. Sala¨ un, Inv ariant extended kalman filter: theory and ap- plication to a v elo city-aided attitude estimation problem , in Pr o c e e dings of the 48h IEEE Confer ence on De cision and Contr ol (CDC) held jointly with 2009 28th Chinese Contr ol Confer ence , 2009, 1297–1304. [18] G. Bourmaud, R. M ´ egret, A. Girem us and Y. Berthoumieu, Discrete extended kalman filter on lie groups, in 21st Eur op e an Signal Pr o cessing Confer enc e (EUSIPCO 2013) , 2013, 1–5. [19] N. G. Brank o Ristic Sanjeev Arulampalam, Beyond the K alman Filter , Wiley-IEEE, 2004. [20] F. Bullo and A. D. Lewis, Ge ometric Control of Mechanic al Systems , Springer-V erlag New Y ork, 2005. [21] C. Cadena, L. Carlone, H. Carrillo, Y. Latif, D. Scaram uzza, J. Neira, I. Reid and J. J. Leonard, Past, presen t, and future of simultaneous lo calization and mapping: T ow ard the robust-perception age , IEEE T ransactions on R ob otics , 32 (2016), 1309–1332. [22] P . Co ote, J. T rumpf, R. Mahony and J. C. Willems, Near-optimal deterministic filtering on the unit circle , in Pr o c e e dings of the 48h IEEE Confer enc e on De cision and Contr ol (CDC) held jointly with 2009 28th Chinese Control Confer enc e , 2009, 5490–5495. [23] J. L. Crassidis and J. L. Junkins, Optimal Estimation of Dynamic Systems , 2nd edition, Chapman & Hall/CR C, 2012. [24] J. L. Crassidis, F. L. Mar kley and Y. Cheng, Surv ey of nonlinear attitude estimation methods , Journal of Guidanc e, Contr ol, and Dynamics , 30 (2007), 12–28, [25] G. Dissanay ak e, S. Huang, Z. W ang and R. Ranasinghe, A review of recen t developmen ts in simultaneous localization and mapping , 2011 6th International Confer enc e on Industrial and Information Systems, ICIIS 2011 - Confer enc e Pr o c ee dings . [26] J. J. Duistermaat and J. A. C. Kolk, Lie Gr oups , Springer-V erlag Berlin Heidelb erg, 2000. [27] H. Durrant-Wh yte and T. Bailey, Simultaneous lo calization and mapping: part i , IEEE R obotics A utomation Magazine , 13 (2006), 99–110. [28] M.-D. Hua, M. Zamani, J. T rumpf, R. Mahony and T. Hamel, Observ er design on the sp ecial euclidean group se(3) , in 2011 50th IEEE Confer enc e on De cision and Contr ol and Eur ope an Contr ol Confer ence , 2011, 8169–8175. [29] S. J. Julier and J. K. Uhlmann, Unscen ted filtering and nonlinear estimation , Pr oc e e dings of the IEEE , 92 (2004), 401–422. [30] S. J. Julier, J. K. Uhlmann and H. F. Durrant-Wh yte, A new approach for filtering nonlinear systems, in Pr o ce e dings of 1995 A meric an Control Confer enc e - A CC’95 , v ol. 3, 1995, 1628– 1632. [31] R. E. Kalman, A new approac h to linear filtering and prediction problems , Journal of Basic Engine ering , 82 (1960), 35–45. [32] R. E. Kalman and R. S. Bucy , New results in linear filtering and prediction theory , Journal of Basic Engine ering , 83 (1961), 95–108. [33] A. Khosra vian, T. Chin, I. Reid and R. Mahon y, A discrete-time attitude observ er on so(3) for vision and gps fusion , in 2017 IEEE International Confer enc e on Rob otics and A utomation (ICRA) , 2017, 5688–5695. [34] S. Koba yashi and K. Nomizu, F oundations of Differ ential Ge ometry , vol. 1, Interscience Publishers, 1963. [35] C. Lageman, J. T rumpf and R. Mahon y, Gradien t-lik e observ ers for inv ariant dynamics on a lie group , IEEE T r ansactions on A utomatic Control , 55 (2010), 367–377. [36] F. Le Bras, T. Hamel, R. Mahon y and C. Samson, Observer design for position and velocity bias estimation from a single direction output , in 2015 54th IEEE Confer enc e on De cision and Contr ol (CDC) , 2015, 7648–7653. EXPLOITING SYMMETR Y IN OBSER VER DESIGN 25 [37] K. W. Lee, W. S. Wijesoma and J. I. Guzman, On the observ ability and observ ability analysis of slam , in 2006 IEEE/RSJ International Confer enc e on Intel ligent R obots and Systems , 2006, 3569–3574. [38] E. J. Lefferts, F. L. Markley and M. D. Sh uster, Kalman filtering for spacecraft attitude estimation , Journal of Guidanc e, Control, and Dynamics , 5 (1982), 417–429. [39] D. G. Luenberger, Observing the state of a linear system , IEEE T ransactions on Military Ele ctronics , 8 (1964), 74–80. [40] Ba-Ngu V o Mahendra Mallick Vikram Krishnamurthy (ed.), Integr ate d T r acking, Classific a- tion, and Sensor Management , Artech House, 2012. [41] R. Mahony and T. Hamel, A geometric nonlinear observer for sim ultaneous lo calisation and mapping , in 2017 IEEE 56th A nnual Confer enc e on De cision and Contr ol (CDC) , 2017, 2408–2415. [42] R. Mahony, T. Hamel and J.-M. Pflimlin, Nonlinear complementary filters on the sp ecial orthogonal group , IEEE T r ansactions on A utomatic Control , 53 (2008), 1203–1218. [43] R. Mahony, T. Hamel, J. T rumpf and C. Lageman, Nonlinear attitude observ ers on so(3) for complementary and compatible measurements: A theoretical study , in Pr o c e edings of the 48h IEEE Confer ence on Decision and Control (CDC) held jointly with 2009 28th Chinese Contr ol Confer ence , 2009, 6407–6412. [44] R. Mahony , T. Hamel, P . Morin and E. Malis, Nonlinear complementary filters on the sp ecial linear group , International Journal of Contr ol , 85 (2012), 1557–1573. [45] R. Mahony , J. T rumpf and T. Hamel, Observers for kinematic systems with symmetry , IF A C Pr oc e e dings V olumes , 46 (2013), 617–633, 9th IF AC Symp osium on Nonlinear Control Sys- tems. [46] M. Mallick, Y. Bar-Shalom, T. Kirubarajan and M. Moreland, An improv ed single-point track initiation using gmti measurements , IEEE T ransactions on A er ospac e and Ele ctronic Systems , 51 (2015), 2697–2714. [47] F. L. Markley , Attitude error representations for kalman filtering , Journal of Guidanc e, Con- tr ol, and Dynamics , 26 (2003), 311–317. [48] F. L. Markley and J. L. Crassidis, F undamentals of Sp ac e craft A ttitude Determination and Contr ol , 1st edition, Springer-V erlag New Y ork, 2014. [49] J. E. Marsden and T. S. Ratiu, Intr o duction to Mechanics and Symmetry , 2nd edition, Springer-V erlag New Y ork, 1999. [50] J. Milnor, Morse The ory , vol. 51 of Annals of Mathematics Studies, Princeton Universit y Press, 1963. [51] A. Saccon, J. T rumpf, R. Mahon y and A. P . Aguiar, Second-order-optimal minimum-energy filters on lie groups , IEEE T ransactions on A utomatic Contr ol , 61 (2016), 2906–2919. [52] J. Thienel and R. M. Sanner, A coupled nonlinear spacecraft attitude con troller and ob- server with an unknown constant gyro bias and gyro noise , IEEE T r ansactions on A utomatic Contr ol , 48 (2003), 2011–2015. [53] J. T rumpf, R. Mahon y and T. Hamel, On the structure of kinematic systems with complete symmetry , in 2018 IEEE Confer enc e on Decision and Contr ol (CDC) , 2018, 1276–1280. [54] J. F. V asconcelos, R. Cunha, C. Silvestre and P . Oliveira, Landmark based nonlinear observer for rigid b ody attitude and position estimation , in 2007 46th IEEE Confer enc e on De cision and Contr ol , 2007, 1033–1038. [55] M. W ang and A. T ay ebi, Geometric nonlinear observer design for slam on a matrix lie group , in 2018 IEEE Conferenc e on De cision and Contr ol (CDC) , 2018, 1488–1493. [56] D. S. W atkins, F undamentals of Matrix Computations , 3rd edition, John Wiley & Sons, Inc., Hoboken, New Jersey , 2010. [57] M. Zamani, J. T rumpf and R. Mahony, Near-optimal deterministic filtering on the rotation group , IEEE T r ansactions on A utomatic Contr ol , 56 (2011), 1411–1414. [58] M. Zamani, J. T rumpf and R. Mahon y, Minimum-energy filtering for attitude estimation , IEEE T r ansactions on A utomatic Contr ol , 58 (2013), 2917–2921. [59] D. E. Zlotnik and J. R. F orb es, Gradien t-based observ er for simultaneous lo calization and mapping , IEEE T r ansactions on A utomatic Contr ol , 63 (2018), 4338–4344. Receiv ed xxxx 20xx; revised xxxx 20xx. E-mail addr ess : anantjoshi@iitb.ac.in E-mail addr ess : sanjeevam@sltc.ac.lk E-mail addr ess : banavar@iitb.ac.in
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment