제한된 과잉 구동 시스템을 위한 모델 레퍼런스 적응 제어 할당 및 안정성 보장
본 논문은 불확실성이 존재하고 액추에이터 포화가 발생하는 과잉 구동 시스템에 대해, 불확실성 추정이나 지속적인 흥분(PE) 가정 없이도 적응 제어 할당을 수행하는 방법을 제시한다. 요소별 비대칭 투영 알고리즘을 이용해 적응 파라미터를 제한하고, 시간 가변 슬라이딩 면을 갖는 슬라이딩 모드 외부 루프를 결합해 전체 폐루프의 안정성과 레퍼런스 추적을 보장한다. 항공기 모델(AD‑MIRE) 시뮬레이션을 통해 제안 기법의 유효성을 검증한다.
저자: Seyed Shahabaldin Tohidi, Yildiray Yildiz, Ilya Kolmanovsky
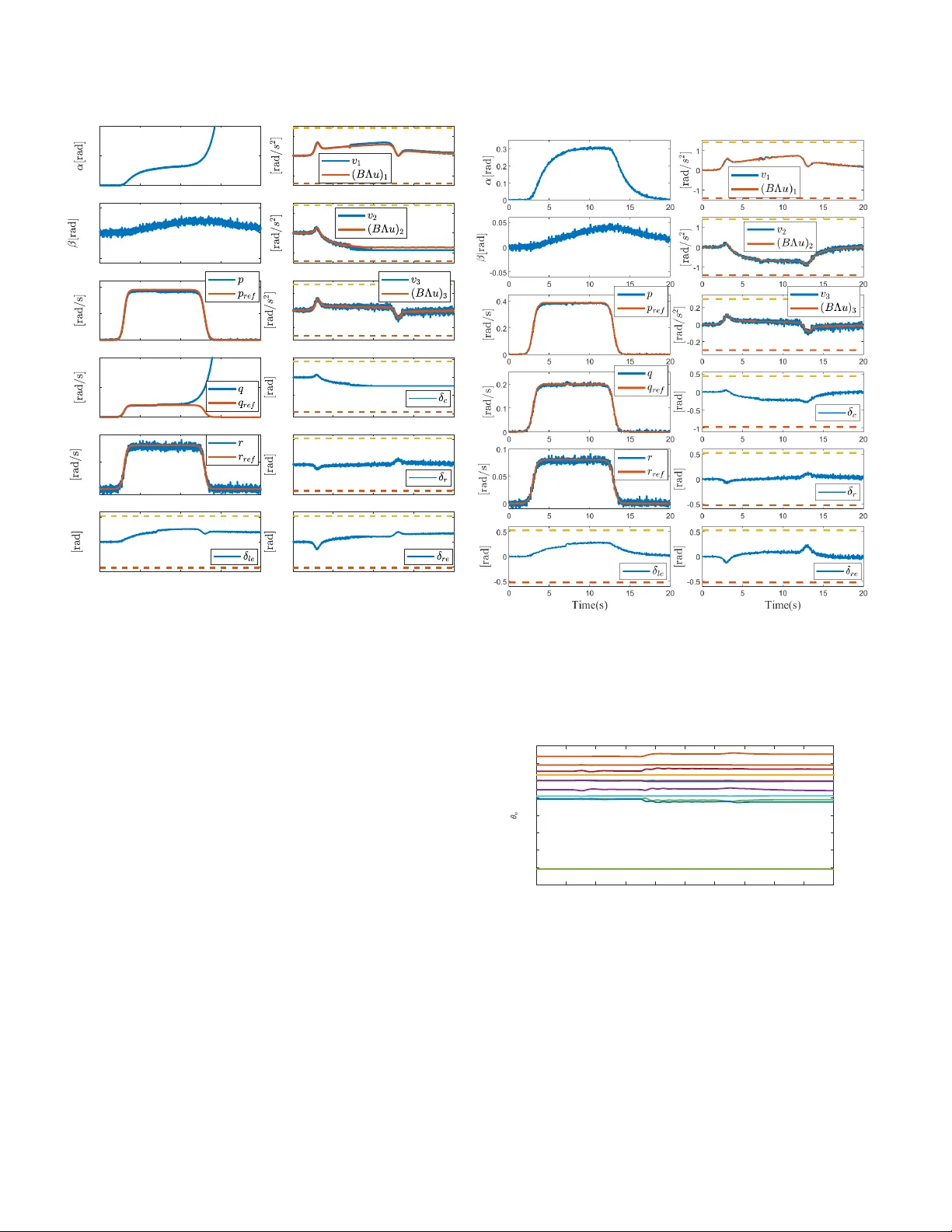
본 논문은 과잉 구동(over‑actuated) 시스템에서 발생하는 제어 할당 문제를 새로운 적응 방식으로 해결한다. 시스템은 입력 매트릭스 B_u가 랭크가 낮아 B_u= B_v B 형태로 분해될 수 있으며, 이는 가상 제어 입력 v와 실제 액추에이터 입력 u 사이의 매핑을 정의한다. 액추에이터 포화와 불확실성(Λ와 외란 d) 때문에 단순히 v= B Λ u 로 매핑하는 것이 불가능하므로, 적응 파라미터 매트릭스 θ를 도입해 u=θᵀv 로 표현한다. 이상적인 파라미터 θ*는 B Λ θ*ᵀ=I_r 를 만족한다.
적응 파라미터를 업데이트할 때는 요소별 비대칭 투영 알고리즘을 사용한다. 각 원소 θ_{i,j}에 대해 구간
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기