Model Reference Adaptive Control Allocation for Constrained Systems with Guaranteed Closed Loop Stability
This paper proposes an adaptive control allocation approach for uncertain over-actuated systems with actuator saturation. The proposed method does not require uncertainty estimation or a persistent excitation assumption. Using the element-wise non-sy…
Authors: Seyed Shahabaldin Tohidi, Yildiray Yildiz, Ilya Kolmanovsky
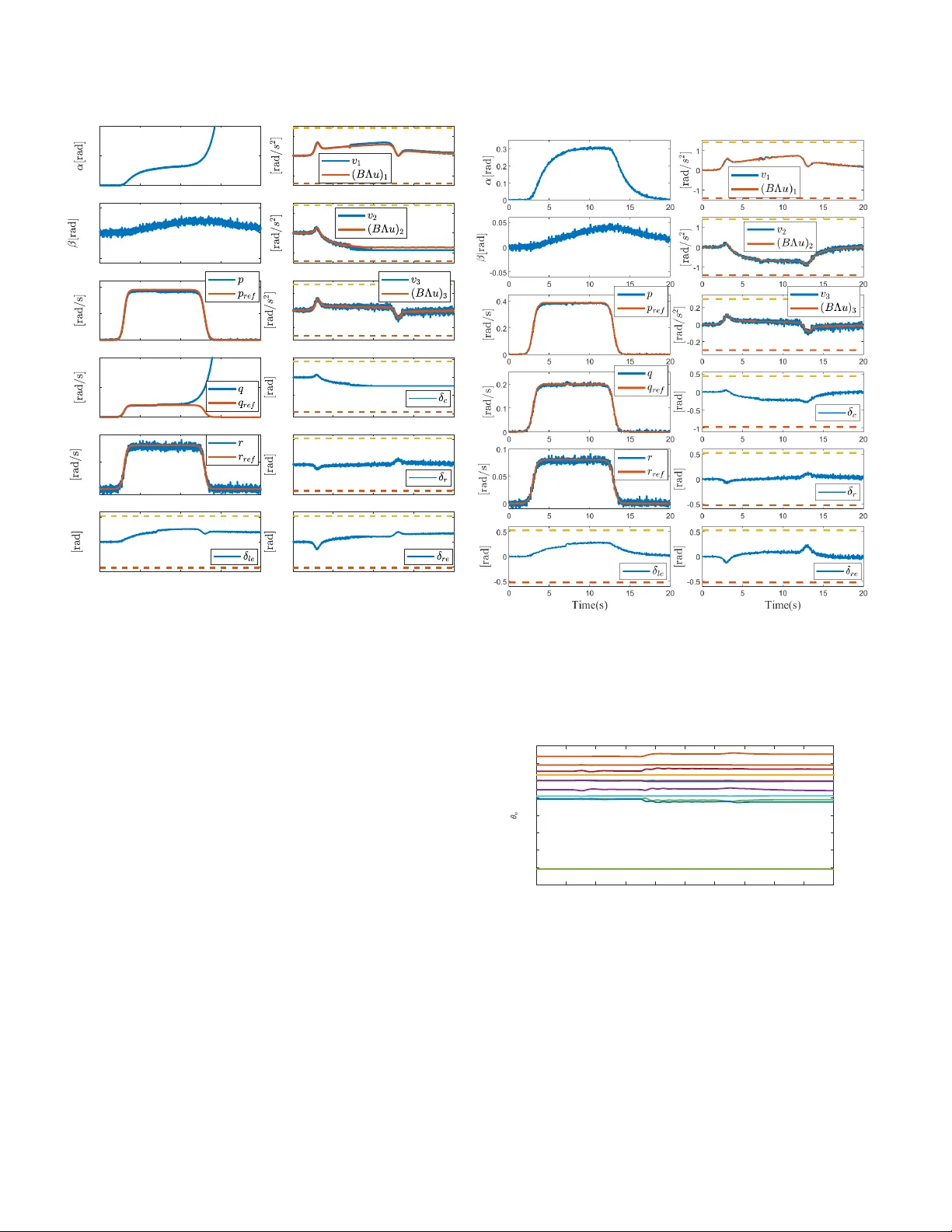
Mo del Reference Adaptiv e Con trol Allo cation for Constrained Systems with Guaran teed Closed Lo op Stabilit y Sey ed Shahabaldin T ohidi a , Yildira y Yildiz a , Ily a Kolmanovsky b a Me chanic al Engine ering Department, Bilkent University, Ankar a, 06800, T urkey b Dep artment of A er ospac e Engine ering, University of Michigan, Ann Arb or, MI 48109, USA Abstract This pap er prop oses an adaptiv e con trol allo cation approac h for uncertain o v er-actuated systems with actuator saturation. The prop osed metho d does not require uncertain ty estimation or a p ersistent excitation assumption. Using the element-wise non-symmetric pro jection algorithm, the adaptiv e parameters are restricted to satisfy certain optimalit y conditions leading to ov erall closed lo op system stability . F urthermore, a sliding mo de controller with a time-v arying sliding surface, working in tandem with the adaptiv e con trol allocation, is proposed to guaran tee the outer lo op stabilit y and reference tracking in the presence of control allocation errors and disturbances. Simulation results are pro vided, where the Aero data Mo del in Research En vironmen t is used as an ov er-actuated system with ac tuator saturation, to demonstrate the effectiveness of the proposed metho d. Key words: Adaptiv e control; Control allo cation; Actuator saturation; Sliding mo de control. Nomenclature θ v Adaptiv e parameter matrix. θ v j The j th column of θ v . θ v i,j The elemen t at the i th ro w and j th column of θ v . θ min i,j The minimum v alue of θ v i,j , assigned by the pro- jection algorithm. θ max i,j The maxim um v alue of θ v i,j , assigned b y the pro jection algorithm. θ ∗ v Ideal parameter matrix. θ ∗ v i,j The elemen t at the i th ro w and j th column of θ ∗ v . θ ∗ min i,j The minimum v alue of θ ∗ v i,j . θ ∗ max i,j The maximum v alue of θ ∗ v i,j . θ ∗ I θ ∗ v when Λ = I . θ ∗ I i,j The elemen t at the i th ro w and j th column of θ ∗ I . ˜ θ v The deviation of the adaptiv e parameter matrix from the ideal parameter matrix. ˜ θ v i,j The elemen t at the i th ro w and j th column of ˜ θ v . ˜ θ max The upper b ound of the norm of ˜ θ v when θ ∗ v i,j ∈ [ θ min i,j θ max i,j ]. ˜ θ M AX The upper b ound of the norm of ˜ θ v when θ ∗ v i,j / ∈ [ θ min i,j θ max i,j ]. Email addresses: shahabaldin@bilkent.edu.tr (Seyed Shahabaldin T ohidi), yyildiz@bilkent.edu.tr (Yildira y Yildiz), ilya@umich.edu (Ilya Kolmanovsky). ζ i,j The pro jection tolerance of the element at the i th row and j th column of θ v . M i The b ound on the i th virtual control signal v i . ρ The v ector of upp er b ound of the the ele- men ts of the disturbance vector d , denoted as ρ = [ ρ 1 , ..., ρ r ] T . ¯ ρ i The upper bound of the norm of the i th row of the multiplicativ e uncertaint y (∆ B ). 1 In tro duction Con trol allo cation is the process of distributing con trol signals among redundan t actuators. Thanks to the b en- efits of actuator redundancy in systems, suc h as im- pro v ed maneuverabilit y , flexibilit y and fault tolerabil- it y , in addition to the decrease in actuator costs due to adv ances in micropro cessors and actuator miniaturiza- tion, the n umber of applications of control allocation has b een growing in recent y ears in suc h domains as aircraft, spacecraft, unmanned air vehicles [1, 4, 16, 30, 34–36, 47, 49, 50], ships, underw ater vehicles [10, 11, 23, 27, 32, 37], automobiles [15, 43], robots [41], and pow er systems [6, 33]. Con trol allo cation metho ds can generally b e categorized in to the follo wing three sets: Pseudo-inv erse-based meth- o ds, optimization based metho ds and dynamic con trol allo cation. Given a mapping betw een a virtual con trol in- put v and the actuator input vector u defined as B u = v , in pseudo inv erse based control allo cation [2, 17, 18, 44], the control input is distributed to the individual actu- ators by the pseudo in verse of this mapping u = B + v . It is known that this distribution minimizes the 2-norm of the actuator input vector. This approac h can be ex- tended to account for actuator saturation [17, 18, 28, 44]. Daisy chaining [7] and redistributed pseudo in verse [5, 39, 48] are the other mo dified versions of pseudo inv erse metho d that consider actuator constrain ts. In optimiza- tion based con trol allo cation [8, 24, 25, 31, 51, 52], con- trol input is distributed b y minimizing the cost function | B u − v | + J 0 , where J 0 refers to secondary ob jectives suc h as minimizing actuator deflections. In dynamic control allo cation [20, 21, 42, 45, 46, 53], the control signals are distributed among actuators using a set of rules dictated b y differen tial equations. A surv ey on con trol allo cation metho ds can b e found in [26]. Con trol allocation is an appealing approac h for the de- sign of active fault-tolerant control systems [16, 19, 38, 54]. Optimization based control allo cation is used in [43] to improv e the p erformance of steering in faulty automo- tiv e v ehicles. In another study [32], thruster forces of an autonomous underw ater v ehicle are allo cated among re- dundan t thrusters using con trol allo cation so that faults are accommo dated. In [34], experimental results are re- p orted demonstrating the redistribution of the control effort, after a fault, among the redundan t actuators of a quadrotor helicopter. In several applications, fault de- tection and isolation methods are employ ed in parallel with control allo cation [16]. In others, faults are assumed to be estimated a priori. In [2], a sliding mo de con troller is coupled w ith a pseudo in v erse based control allo ca- tion to obtain a fault toleran t con troller wherein faults are assumed to b e estimated. Similarly in [38], it is as- sumed that there exists a fault detection and isolation sc heme whic h is able to estimate and identify stuck-in- place, hard-o ver, loss of effectiveness and floating actua- tor faults. In [13], an unkno wn input observer is applied to identify actuator and effector faults. A fault detec- tion and isolation metho d, for nonlinear systems with redundan t actuators, by using a family of unkno wn in- put observ ers is proposed in [14]. In [44] and [8], faults are estimated adaptiv ely using a recursiv e least square metho d, and an online dither generation method is pro- p osed to guarantee the p ersistence of excitation. This paper prop oses an adaptiv e con trol allocation metho d for uncertain systems with redundant actua- tors in presence of actuator saturation. The metho d builds upon successful approaches men tioned ab ov e by eliminating the need for uncertain t y estimation, and therefore it do es not require p ersistence of excitation. F urthermore, in the prop osed approac h, a closed lo op reference model [22] is emplo yed for fast con v ergence without inducing undesired oscillations. The stability of the ov erall closed lo op system, including the controller, con trol allocator and the plant is rigorously studied. Preliminary results of this study were previously pre- sen ted in [45] and [46]. A modified v ersion of the adap- tiv e con trol allo cation method based on reducing the difference betw een the deriv ative of virtual and actual con trol signals w as introduced in [47]. It was demon- strated in [47] that the prop osed approach can mitigate pilot induced oscillations. In this paper, w e provide the complete picture with an ov erall closed lo op stabilit y pro of in the presence of actuator saturation, which was missing in these earlier studies. Other adaptiv e approaches to control allo cation hav e b een described in [42] and [20]. Differen t from these approac hes, we explicitly consider the actuator satura- tion, where w e guarantee that the control signals remain within their limits all the time, which allows a system- atic design of the outer lo op controller without assuming its existence a priori. Apart from the contributions to the control allo cation literature mentioned ab o v e, we also show ed that it is p ossible to employ the pro jection algorithm [29] in a stable manner even if the ideal adaptive parameters are not inside the pro jection b oundaries. T o the b est of our kno wledge, this result was not rep orted earlier in the literature. This paper is organized as follows. Section I I in tro duces notations and preliminary results. Section I I I presen ts the uncertain o v er-actuated plant dynamics and the pro- p osed mo del reference adaptiv e con trol allocation ap- proac h with a closed lo op reference mo del. A discussion of actuator saturation and its effects on virtual control limits together with the pro jection algorithm are given in Section IV. The con troller design, pro ducing the vir- tual control input, is presen ted in section V. The AD- MIRE mo del is used in Section VI to demonstrate the effectiv eness of the prop osed approac h in the simulation en vironmen t. Finally , a summary is given in Section VI I. 2 Bac kground In this section, w e collect sev eral definitions and ba- sic results which are exploited in the following sections. Throughout this pap er, || . || refers to the Euclidean norm for v ectors and induced 2-norm for matrices, and || . || F refers to the F robenius norm. The pro jection op erator, denoted as Pro j, for tw o vectors θ and y is defined as [29] Pro j( θ , y ) ≡ y − ∇ f ( θ )( ∇ f ( θ )) T ||∇ f ( θ ) || 2 y f ( θ ) if f ( θ ) > 0 & y T ∇ f ( θ ) > 0 y other w ise, (1) 2 where f ( . ) is a conv ex and smo oth ( C 1 ) function, and ∇ ( . ) : R → R is the gradient operator. If θ v ∈ R r × m and Y ∈ R r × m are matrices, the pro jection op erator is defined as Pro j θ v , Y = Pro j( θ v , 1 , Y 1 ) , ..., Pro j( θ v ,m , Y m ) , (2) where θ v ,j and Y j are the j th columns of θ v and Y , resp ectiv ely , and Pro j( θ v ,j , Y j ) is defined using (1). A particular choice of (1) is given by Pro j θ v ,j , Y j = Pro j( θ v 1 ,j , Y 1 ,j ) , ..., Pro j( θ v m,j , Y m,j ) , (3) where θ v i,j and Y i,j are the i th comp onents of θ v ,j and Y j resp ectiv ely , and Pro j( θ v i,j , Y i,j ) : R × R → R is an “elemen t-wise pro jection” defined as Pro j( θ v i,j , Y i,j ) ≡ Y i,j − Y i,j f ( θ v i,j ) if f ( θ v i,j ) > 0 & Y i,j d f ( θ v i,j ) dθ v i,j > 0 Y i,j other w ise, (4) where f ( . ) : R → R is a conv ex function defined as f ( θ v i,j ) = ( θ v i,j − θ min i,j − ζ i,j )( θ v i,j − θ max i,j + ζ i,j ) ( θ max i,j − θ min i,j − ζ i,j ) ζ i,j , (5) where ζ i,j is the pro jection tolerance of the i, j th elemen t of θ v that should b e ch osen as 0 < ζ i,j < 0 . 5( θ max i,j − θ min i,j ). Also, θ max i,j and θ min i,j are the upp er and low er b ound of the i, j th element of θ v . These b ounds also form the pro jection b oundary (see figure 1). In comparison to the pro jection algorithm in [29], the pro jection algorithm (4) is elemen t-wise and the prop osed conv ex function in (5) considers the cases where θ min i,j 6 = − θ max i,j . In the con v ex function (5), f ( θ v i,j ) = 0 when θ v i,j = θ max i,j − ζ i,j or θ v i,j = θ min i,j + ζ i,j , and f ( θ v i,j ) = 1 when θ v i,j = θ max i,j or θ v i,j = θ min i,j . Lemma 1. If ˙ θ v i,j = Pro j( θ v i,j , Y i,j ) with initial condi- tions θ v i,j (0) ∈ Ω i,j = { θ v i,j ∈ R | f ( θ v i,j ) ≤ 1 } , where f ( θ v i,j ) : R → R is a conv ex function, then θ v i,j ∈ Ω i,j for ∀ t ≥ 0. Pro of. The proof of Lemma 1. can be found in [22]. 2 Lemma 2. F or θ ∗ v i,j ∈ [ θ min i,j + ζ i,j , θ max i,j − ζ i,j ], θ v i,j ∈ R r × m , Y ∈ R r × m and the pro jection algorithm in (4) and (5), the following inequality holds: tr ( θ T v − θ ∗ v T ) − Y + Pro j( θ v , Y ) ≤ 0 , (6) where tr ( . ) refers to the trace of a matrix. Fig. 1. Conv ex function f ( θ v i,j ). Pro of. Let I i,j = 1 if f ( θ v i,j ) > 0 and Y i,j d f ( θ v i,j ) dθ v i,j > 0, and let I i,j = 0, otherwise. Then, tr ( θ T v − θ ∗ v T ) − Y + Pro j( θ v , Y ) = m X j =1 r X i =1 ( θ v i,j − θ ∗ v i,j ) − Y i,j + Pro j( θ v i,j , Y i,j ) = m X j =1 r X i =1 ( θ v i,j − θ ∗ v i,j ) − Y i,j + Y i,j − Y i,j f ( θ v i,j )) I i,j = m X j =1 r X i =1 ( θ ∗ v i,j − θ v i,j ) Y i,j f ( θ v i,j ) I i,j ≤ 0 . 2 3 Mo del Reference Adaptive Control Allo ca- tion The closed lo op system studied in this pap er is presen ted in Figure 2. Consider the following plant dynamics, ˙ x = Ax + B u (Λ u + d u ) , (7) where x ∈ R n is the state v ector, u = [ u 1 , ..., u m ] T ∈ R m is the actuator input v ector, where u i ∈ [ − u max i , u max i ], A ∈ R n × n is the known state matrix, B u ∈ R n × m is the kno wn input matrix and d u ∈ R m is a bounded disturbance input. The matrix Λ ∈ R m × m is assumed to b e diagonal, with non-negative elements represent- ing actuator effectiveness uncertaint y . It is assumed that the pair ( A, B u Λ) is con trollable. Due to actuator re- dundancy , the input matrix is rank deficient, that is Rank( B u ) = r < m . Consequen tly , B u can b e written as B u = B v B , where B v ∈ R n × r is a full column rank matrix, i.e. Rank( B v ) = r , and B ∈ R r × m . The decom- p osition of B u helps exploit the actuator redundancy using con trol allo cation. Emplo ying this decomposition, (7) can b e rewritten as ˙ x = Ax + B v ( B Λ u + ¯ d ) , (8) 3 Fig. 2. Blo ck diagram of the closed lo op system with the prop osed adaptive control allo cation metho d. where ¯ d ( t ) = B d u ( t ) is assumed to ha ve an upp er bound || ¯ d ( t ) || ≤ ¯ L , for all t ≥ 0. The control allo cation task is to achiev e B Λ u + ¯ d = v , (9) where v ∈ R n is the virtual control signal and also the output of the nominal controller which will be defined in Section V (See Figure 2). Considering the following dynamics, ˙ y = A m y + B Λ u + ¯ d − v , (10) where A m ∈ R r × r is a stable (Hurwitz) matrix, a refer- ence mo del is constructed as ˙ y m = A m y m . (11) Defining the actuator input as a mapping from v to u , u = θ T v v , (12) where θ v ∈ R r × m represen ts the adaptiv e parameter matrix to b e determined, and substituting (12) into (10), w e obtain ˙ y = A m y + ( B Λ θ T v − I r ) v + ¯ d, (13) where I r is an identit y matrix of dimension r × r . It is assumed that there exists an ideal matrix θ ∗ v suc h that B Λ θ ∗ v T = I r . (14) Defining e = y − y m and subtracting (11) from (13), it follo ws that ˙ e = A m e + B Λ ˜ θ T v v + ¯ d, (15) where ˜ θ v = θ v − θ ∗ v . Theorem 1. If the adaptive parameter matrix (10) is up dated using the following adaptive law, ˙ θ v = Γ θ Pro j θ v , − v e T P B , (16) where the pro jection op erator “Pro j” is defined in (4), with conv ex and smo oth ( C 1 ) function f ( θ v i,j ) in (5), and where Γ θ = γ θ I r , γ θ > 0, then giv en any initial condition e (0) ∈ R r , θ v i,j (0) ∈ [ θ min i,j , θ max i,j ], and θ ∗ v i,j ∈ [ θ min i,j + ζ i,j , θ max i,j − ζ i,j ], e ( t ) and ˜ θ v ( t ) remain uniformly bounded for all t ≥ 0 and their tra jectories con v erge exp onentially to the set E 1 = { ( e, ˜ θ v ) : || e || 2 ≤ ( s ˜ θ 2 max γ θ + 2 m 4 ¯ L 2 σ 2 ) 4 sm 2 σ , || ˜ θ v || ≤ ˜ θ max } , (17) where constants s , σ , m and ˜ θ max will b e defined in the pro of of the theorem. Pro of. Consider a Lyapuno v function candidate, V = e T P e + tr ( ˜ θ T v Γ − 1 θ ˜ θ v Λ) , (18) where Γ θ = Γ T θ = γ θ I r , γ θ > 0, tr refers to the trace op- eration and P is the p ositive definite symmetric matrix solution of the Lyapuno v equation, A T m P + P A m = − Q, (19) and where Q is a symmetric p ositive definite matrix. The deriv ativ e of the Lyapuno v function candidate (18) along the tra jectories of (15)-(16) can b e calculated as ˙ V = e T ( A m P + P A m ) e + 2 e T P B Λ ˜ θ T v v + 2 tr ( ˜ θ T v Γ − 1 θ ˙ ˜ θ v Λ) + 2 e T P ¯ d (20) = − e T Qe + 2 e T P B Λ ˜ θ T v v + 2 tr ( ˜ θ T v Γ − 1 θ ˙ ˜ θ v Λ) + 2 e T P ¯ d. Using the prop erty of the trace op eration, a T b = tr ( ba T ) where a and b are vectors, (20) can b e rewritten as ˙ V = − e T Qe + 2 tr ˜ θ T v v e T P B + Γ − 1 θ ˙ ˜ θ v Λ + 2 e T P ¯ d. (21) Using the following adaptive law, ˙ θ v = Γ θ Pro j θ v , − v e T P B , (22) (21) can b e written as ˙ V = − e T Qe + 2 e T P ¯ d +2 tr ˜ θ T v v e T P B + Pro j θ v , − v e T P B Λ . (23) In the absence of a disturbance ¯ d , it can be shown, by using Lemma 2, that ˙ V ≤ 0 and therefore e and ˜ θ v are b ounded. F urthermore, using Barbalat’s lemma it can b e shown that the error e conv erges to zero. When ¯ d 6 = 0, it can b e sho wn that all the tra jectories conv erge to a 4 compact set E 1 . T o find E 1 , it is necessary to define the follo wing parameters [22] σ ≡ − max i (Real( λ i ( A m ))) , (24) s ≡ − min i ( λ i ( A m + A T m ) / 2) , (25) a ≡ || A m || , (26) where λ i ( A m ) refers to the i th eigenv alue of the matrix A m . If the matrix Q in (19) is selected as an identit y matrix of dimension r × r , then the matrix P satisfies the following prop erties [22] || P || ≤ m 2 σ , (27) λ min ( P ) ≥ 1 2 s , (28) where σ and s are defined in (24) and (25), λ min ( . ) de- notes the minim um eigen v alue and m = 3 2 (1 + 4 a σ ) ( r − 1) , and where a is defined in (26). Using the Lyapuno v function candidate (18), it follows that V = e T P e + tr ( ˜ θ T v Γ − 1 θ ˜ θ v Λ) ≤ || e || 2 || P || + tr ( ˜ θ T v Γ − 1 θ ˜ θ v Λ) = || e || 2 || P || + (1 /γ θ ) tr ( ˜ θ T v ˜ θ v Λ) ≤ || e || 2 || P || + (1 /γ θ ) || ˜ θ v || 2 F ≤ || e || 2 || P || + (1 /γ θ ) ˜ θ 2 max , (29) where Γ − 1 θ = (1 /γ θ ) I r , γ θ > 0, Λ = diag ( λ 1 , ..., λ m ) , 0 < λ i ≤ 1 and considering θ ∗ v i,j ∈ [ θ min i,j + ζ i,j , θ max i,j − ζ i,j ] and using (5), w e hav e || ˜ θ v ( t ) || F ≤ ˜ θ max , for all t ≥ 0, where ˜ θ max is defined as ˜ θ max ≡ s X i,j ( θ max i,j − θ min i,j − ζ i,j ) 2 . (30) Using (29), we hav e V || P || − ˜ θ 2 max γ θ || P || ≤ || e || 2 . (31) Since θ ∗ v i,j ∈ [ θ min i,j + ζ i,j , θ max i,j − ζ i,j ], using (23), (6), and considering Q = I r , we ha ve ˙ V ≤ −|| e || 2 + 2 || e |||| P ¯ d || . In addition, by using the inequality , | xy | ≤ x 2 2 c + c | y | 2 2 , (32) for c = 2, x = || e || , y = || P ¯ d || , it follows that we hav e 2 || e |||| P ¯ d || ≤ 1 2 || e || 2 + 2 || P ¯ d || 2 . Recalling that the upper b ound of ¯ d is ¯ L , it follows that ˙ V ≤ − 1 2 || e || 2 + 2 || P || 2 ¯ L 2 . Th us, using (31), we hav e ˙ V ( t ) ≤ − 1 2 || e || 2 + 2 || P || 2 ¯ L 2 ≤ − V 2 || P || + ˜ θ 2 max 2 γ θ || P || + 2 || P || 2 ¯ L 2 ≤ − ω 1 V + ω 2 , (33) where ω 1 = σ 2 m 2 and ω 2 = s γ θ ˜ θ 2 max + 2 m 4 ¯ L 2 σ 2 . By using the Gron w all inequalit y , whose statemen t is that for ˙ V ( t ) ≤ b ( t ) V ( t ) + h ( t ), we ha v e V ( t ) ≤ V (0) exp ( Z t α b ( s ) ds ) + Z t α h ( s ) exp ( Z t s b ( τ ) dτ ) ds, (34) (33) can b e rewritten as V ( t ) ≤ V (0) − ω 2 ω 1 e − ω 1 t + ω 2 ω 1 . (35) Using e ( t ) T P e ( t ) ≤ V ( t ) ≤ V (0) − ω 2 ω 1 e − ω 1 t + ω 2 ω 1 and taking the limits of the leftmost and rightmost sides as t go es to infinity , we hav e lim sup t →∞ e ( t ) T P e ( t ) ≤ ω 2 ω 1 = ( s ˜ θ 2 max γ θ + 2 m 4 ¯ L 2 σ 2 ) 2 m 2 σ . (36) By using the following inequality λ min ( P ) || e || 2 ≤ e T P e ≤ λ max ( P ) || e || 2 , (37) and (28), we hav e 1 2 s || e || 2 ≤ λ min ( P ) || e || 2 ≤ e T P e. (38) By using (36) and taking the limit of b oth sides of (38) as t go es to infinity , lim sup t →∞ || e ( t ) || 2 ≤ ( s ˜ θ 2 max γ θ + 2 m 4 ¯ L 2 σ 2 ) 4 sm 2 σ . (39) Therefore, for the initial conditions e (0) and θ v i,j (0) ∈ [ θ min i,j , θ max i,j ], e ( t ) and ˜ θ v ( t ) are uniformly b ounded for all t ≥ 0 and system tra jectories conv erge to the follo wing compact set E 1 = { ( e, ˜ θ v ) : || e || 2 ≤ ( s ˜ θ 2 max γ θ + 2 m 4 ¯ L 2 σ 2 ) 4 sm 2 σ , || ˜ θ v || ≤ ˜ θ max } . (40) 5 2 It is noted that the bound on ˜ θ v in (40) is a direct result of Lemma 1 and the definition given in (30). The analysis pro vided abov e shows that θ v and e are b ounded. Assuming that v is bounded, (12) implies that u is bounded. In the sequel, the b oundedness of v will b e established by using a soft saturation b ound on v during the design of the controller, the effect of which will b e analyzed in section 5.3. Since A m is Hurwitz, the v ari- able y , whose dynamics is given in (10), is also b ounded. Therefore, all the signals in the adaptive control alloca- tion system are b ounded. Remark 1. Note that θ ∗ v ∈ R r × m is the ideal parameter matrix that should satisfy (14). Since Λ is unknown, θ ∗ v is also unknown. How ever, although the diagonal matrix Λ is unkno wn, the range of its elements can be taken as (0 , 1], assuming that the uncertaint y originates from p ossible loss of actuator effectiveness. Thus, using (14), the range of θ ∗ v can b e obtained, and expressed as θ ∗ i,j ∈ [ θ ∗ min i,j , θ ∗ max i,j ]. Remark 2. Let [ θ min i,j , θ max i,j ] ⊂ [ θ ∗ min i,j , θ ∗ max i,j ] and θ ∗ v i,j / ∈ [ θ min i,j + ζ i,j , θ max i,j − ζ i,j ], and consider the pro jection algorithm (4) with con v ex function (5). Then, ˜ θ max , which was defined in (30), should b e redefined so that || ˜ θ v ( t ) || F ≤ ˜ θ M AX , for all t ≥ 0, where ˜ θ M AX is defined as ˜ θ M AX ≡ s X i,j (max( | θ ∗ max i,j − θ min i,j | , | θ ∗ min i,j − θ max i,j | )) 2 . (41) W e note that to delineate tw o different cases (the ideal parameter θ ∗ v b eing inside or outside the pro jection b ounds), the maximum v alue of adaptive parameter deviation from its ideal v alue is designated by ˜ θ max for the former and ˜ θ M AX for the latter case. Belo w, w e pro vide a lemma and a theorem, regarding the stability of the control allo cation for the latter case, i.e. when θ ∗ v i,j / ∈ [ θ min i,j + ζ i,j , θ max i,j − ζ i,j ]. Lemma 3. F or θ ∗ v i,j / ∈ [ θ min i,j + ζ i,j , θ max i,j − ζ i,j ], θ v i,j ∈ R r × m , Y ∈ R r × m with r ≤ m and the pro jection algorithm (4)-(5), the following inequality holds: tr ( θ T v − θ ∗ v T ) − Y + Pro j( θ v , Y ) ≤ √ r ˜ θ M AX || Y || . (42) Pro of. F or b oth cases in pro jection algorithm (4), w e ha v e tr ( θ T v − θ ∗ v T ) − Y + Pro j( θ v , Y ) = m X j =1 r X i =1 ( θ v i,j − θ ∗ v i,j ) − Y i,j + Pro j( θ v i,j , Y i,j ) ≤ m X j =1 r X i =1 | ( θ v i,j − θ ∗ v i,j ) Y i,j f ( θ v i,j ) | ≤ m X j =1 r X i =1 | ˜ θ i,j Y i,j | = tr ( | ˜ θ T v || Y | ) ≤ || ˜ θ v || F || Y || F ≤ √ r || ˜ θ v || F || Y || ≤ √ r ˜ θ M AX || Y || , where we used the prop erty , || Y || F ≤ p min ( r , m ) || Y || , and | ˜ θ T v | and | Y | which are the matrices of absolute v al- ues of the elements of ˜ θ T v and Y , resp ectiv ely . 2 Theorem 2. Consider (10), the reference mo del (11), the controller (12), and the adaptive law, ˙ θ v = Γ θ Pro j θ v , − v e T P B , (43) where Γ − 1 θ = (1 /γ θ ) I r , γ θ > 0, and the pro jection is defined in (4) and (5). Assume || v ( t ) || ≤ M and || ¯ d ( t ) || ≤ ¯ L for all t ≥ 0. Then, for any initial condition e (0) ∈ R r , θ v i,j (0) ∈ [ θ min i,j , θ max i,j ], and θ ∗ v i,j / ∈ [ θ min i,j + ζ i,j , θ max i,j − ζ i,j ], e ( t ) and ˜ θ v ( t ) are uniformly b ounded for all t ≥ 0 and their tra jectories conv erge exp onentially to ˆ E 1 = { ( e, ˜ θ v ) : || ˜ θ v || ≤ ˜ θ M AX , || e || 2 ≤ ( s ˜ θ 2 MAX γ θ + 4 m 4 ¯ L 2 + 4 r ˜ θ 2 MAX m 4 || B || 2 M 2 σ 2 ) 4 sm 2 σ } , (44) where the constants σ , s and m are defined in the pro of of Theorem 1 and ˜ θ M AX is defined in Remark 2. Pro of. By using (18), (19) with Q = I r , (23) and (42) with Y = − v e T P B , we hav e ˙ V ≤ −|| e || 2 + 2 || e |||| P || ¯ L + 2 √ r ˜ θ M AX || Y || ≤ −|| e || 2 + 2 || e |||| P || ¯ L + 2 √ r ˜ θ M AX || e |||| P |||| B || M , (45) where || ¯ d || ≤ ¯ L and v is the control command vector pro duced by the controller with an upp er b ound M . By using the inequality (32) with x = || e || , y = 2 || P || ¯ L , c = 2 for 2 || e |||| P || ¯ L in (45), and x = || e || , y = 2 √ r ˜ θ M AX || P |||| B || M , c = 2 for 2 √ r ˜ θ M AX || e |||| P |||| B || M 6 in (45), we obtain that ˙ V ≤ − 1 2 || e || 2 + 4 || P || 2 ¯ L 2 + 4 r ˜ θ 2 M AX || P || 2 || B || 2 M 2 . (46) Using (31), we obtain that ˙ V ≤ − V 2 || P || + ˜ θ 2 MAX 2 γ θ || P || + 4 || P || 2 ¯ L 2 (47) + 4 r ˜ θ 2 MAX || P || 2 || B || 2 M 2 ≤ − ˆ ω 1 V + ˆ ω 2 , where ˆ ω 1 = σ 2 m 2 and ˆ ω 2 = s γ θ ˜ θ 2 MAX + 4 m 4 ¯ L 2 σ 2 + 4 r ˜ θ 2 MAX m 4 || B || 2 M 2 σ 2 , and where σ and s are defined in (24) and (25). F ollo wing the same pro cedure as for E 1 , ˆ E 1 is obtained as ˆ E 1 = { ( e, ˜ θ v ) : || ˜ θ v || ≤ ˜ θ M AX , || e || 2 ≤ ( s ˜ θ 2 MAX γ θ + 4 m 4 ¯ L 2 + 4 r ˜ θ 2 MAX m 4 || B || 2 M 2 σ 2 ) 4 sm 2 σ } . (48) 2 Remark 3. A discussion ab out putting an upper bound M on the control command, without assuming a stable con trol allo cation, is given in section IV. T o obtain fast conv ergence without in troducing exces- siv e oscillations, the op en loop reference model (11) is mo dified to obtain the following closed lo op reference mo del [22]. ˙ y m = A m y m − L ( y − y m ) , (49) where A m ∈ R r × r is Hurwitz, L = − `I r , ` > 0, and I r ∈ R r × r is an iden tity matrix. Defining ¯ A m = A m + L , and subtracting (49) from (13), it follows that ˙ e = ¯ A m e + B Λ ˜ θ T v v + ¯ d. (50) W e assume that the matrix ¯ A m is made Hurwitz through an appropriate selection of L . Theorem 3. Consider (10), the reference mo del (49), the controller (12), and the adaptive law ˙ θ v = Γ θ Pro j θ v , − v e T P B , (51) where Γ − 1 θ = (1 /γ θ ) I r , γ θ > 0 and the pro jection is de- fined b y (4) and (5). F or any initial condition e (0) ∈ R r , and θ v i,j (0) ∈ [ θ min i,j , θ max i,j ], e ( t ) and ˜ θ ( t ) are uni- formly b ounded for all t ≥ 0 and their tra jectories con- v erge exponentially to a closed and b ounded set defined either by (60) or (61) in the pro of of Theorem 3. Pro of. Consider the following Lyapuno v function can- didate, V 1 = e T ¯ P e + tr ( ˜ θ T v Γ − 1 θ ˜ θ v Λ) , (52) where ¯ P is the symmetric p ositive definite matrix solu- tion of the following Lyapuno v equation, ¯ A T m ¯ P + ¯ P ¯ A m = − I r , (53) where I r is an identit y matrix of dimension r × r . The time deriv ativ e of V 1 along the tra jectories of (50)-(51) can b e obtained as ˙ V 1 = − e T ¯ Qe + 2 e T P ¯ d + 2 tr ˜ θ T v v e T ¯ P B + Γ − 1 θ ˙ ˜ θ v Λ . (54) Aassume first that θ ∗ v i,j ∈ [ θ min i,j + ζ i,j , θ max i,j − ζ i,j ]. T o find the set to which e and ˜ θ v con v erge, it is necessary to define the following parameters [22] ¯ σ ≡ − max i (Real( λ i ( ¯ A m ))) , (55) ¯ s ≡ − min i ( λ i ( ¯ A m + ¯ A T m ) / 2) , (56) ¯ a ≡ || ¯ A m || . (57) Then, ¯ P satisfies the following prop erties [22]: || ¯ P || ≤ ¯ m 2 ¯ σ + 2 ` , (58) λ min ( ¯ P ) ≥ 1 2( ¯ s + ` ) , (59) where λ min ( . ) denotes the minim um eigenv alue and ¯ m = 3 2 (1 + 4 ¯ a ¯ σ ) ( r − 1) . Pro ceeding as in the pro of of Theorem 1, and using (55- 57), for the initial conditions e (0) and || ˜ θ v (0) || ≤ ˜ θ max , e and ˜ θ v can b e sho wn to b e uniformly b ounded and con v erge to the following set, E 2 = { ( e, ˜ θ v ) : || e || 2 ≤ ( ( ¯ s + ` ) ˜ θ 2 max γ θ + 2 ¯ m 4 ¯ L 2 ( ¯ σ + 2 ` ) 2 ) × 4( ¯ s + ` ) ¯ m 2 ( ¯ σ + 2 ` ) , || ˜ θ v || ≤ ˜ θ max } . (60) If θ ∗ v i,j / ∈ [ θ min i,j + ζ i,j , θ max i,j − ζ i,j ], pro ceeding similar as in the proof of Theorem 2, the conv ergence set is 7 c haracterized as ˆ E 2 = { ( e, ˜ θ v ) : || e || 2 ≤ ( ( ¯ s + ` ) ˜ θ 2 MAX γ θ + 4 ¯ m 4 ¯ L 2 ( ¯ σ + 2 ` ) 2 + 4 r ˜ θ 2 MAX ¯ m 4 || B || 2 M 2 ( ¯ σ + 2 ` ) 2 ) 4( ¯ s + ` ) ¯ m 2 ( ¯ σ + 2 ` ) , || ˜ θ v || ≤ ˜ θ M AX } . (61) 2 4 Determination of the pro jection b oundaries In the previous section, the adaptive control allo ca- tor was designed based on the pro jection op erator and pro v ed to b e stable. In this section, the selection of the pro jection b oundaries, which define the b o unds on adaptiv e con trol parameters, is explained. The pro jec- tion boundaries are determined to satisfy t wo require- men ts: 1) The actuator command signals should not saturate the actuators and 2) a sp ecific requirement in the con troller design, whic h will b e pro vided in the follo wing subsections, to obtain a stable closed lo op system, including the con troller, the control allo cator and the plant (see Fig. 2), should b e satisfied. The de- sign pro cedure to ac hieve these goals is comp osed of three main steps. In the first step, an attainable set for virtual control signal vector v is found in the absence of disturbance based on the actuators constraints and v = B Λ u . In the second step, using the calculated at- tainable set for v , pro jection b ounds are calculated to satisfy − u max ≤ θ T v v ≤ u max . In the first tw o steps, the attainable sets are obtained, and as long as the signals are inside these set, w e can guarantee that the actua- tor constraints are satisfied. In the third step, a subset of the pro jection boundaries calculated in step 2 that satisfies an ov erall closed lo op stability requiremen t is determined. Step 1 In this step, realizable v alues of virtual control signals are found. Note that the actuator constrain ts are known: u ( t ) ∈ Ω u , where Ω u = { [ u 1 , ..., u m ] T : − u max i ≤ u i ≤ u max i , i = 1 , ..., m } . Therefore, using Ω u , the set Ω v ∈ R r , defining all realizable v alues of the virtual control input v , can b e obtained as Ω v = { v : v = B u, u ∈ Ω u , B † v ∈ Ω u } . Note that Ω v also defines the upp er and low er b ounds of each element of the realizable virtual con trol, v = [ v 1 , ..., v r ] T . T o make sure that v i remains within its real- izable b ounds, v i ∈ [ − M i , M i ], ∀ i = 1 , ..., r , we use a soft saturation b ound on the control signal v . In Section V, w e will design the controller b y taking this saturation b ound into account. Step 2 The pro jection boundaries that limit the adaptive pa- rameters are calculated in this step, to make sure that the actuator signal vector u do es not saturate the actu- ators. F rom Step 1, we obtained the attainable set for the vir- tual con trol signals (Ω v ). The actuator limits, u max and u min = − u max are known. With this information, the set Ω θ = { v ec ( θ v ) : − u max ≤ θ T v v ≤ u max , v ∈ Ω v } , where v ec( . ) : R r × m → R rm puts the elemen ts of a matrix in a column vector, can be obtained. Note that θ ∗ I ∈ Ω θ , that is, in the absence of any uncertaint y , the ideal adaptiv e parameter matrix, θ ∗ I , alwa ys exists in Ω θ . This leads to the smallest conv ergence set for error tra jectories when Λ = I . Step 3 In this step, a subset of Ω θ , which satisfies a necessary condition for controller stability , is obtained. This sub- set of Ω θ also determines the ultimate pro jection b ound- aries, and is denoted by Ω pro j . After Step 2, establishing that the control allo cation out- put, which is the actuator input signal vector u , do es not saturate the actuators, the plan t dynamics (8) can b e rewritten, b y using (12), (14) and defining ˜ θ v = θ v − θ ∗ v , as ˙ x = Ax + B v ( B Λ u + ¯ d ) = Ax + B v ( B Λ θ T v v + ¯ d ) = Ax + B v ( I + B Λ ˜ θ T v ) v + B v ¯ d. (62) Defining ∆ B ≡ B Λ ˜ θ T v , and substituting in (62), it fol- lo ws that ˙ x = Ax + B v ( v + d ) , (63) where d = ∆ B v + ¯ d ∈ R r . T o b e able to design a stabilizing con troller, one m ust mak e sure that the i th element of the disturbance v ector d = [ d 1 , ..., d r ] T in (63), is smaller in absolute v alue than the upp er b ound of the i th element of the virtual con trol input which was defined in Step 1, that is | d i | < M i , i = 1 , ..., r . Since each d i = ro w i (∆ B ) v + ¯ d i , where ¯ d i is the i th element of ¯ d , and row i ( . ) designates the i th row of a matrix, satisfying the following condition ensures that | d i | < M i , i = 1 , ..., r : M i − || ro w i (∆ B ) || M max > | ¯ d i | , i = 1 , ..., r , (64) where M max = max i M i . A necessary condition for satisfying the inequality (64), is || ro w i (∆ B ) || = || ro w i ( B Λ ˜ θ T v ) || < M i M max for all i = 1 , ..., r . (Sufficient conditions required to satisfy (64) will be discussed later in Remark 4). Thus, the elemen ts of the matrix θ v should b e prop erly b ounded in order to satisfy the necessary condition || ro w i ( B Λ ˜ θ T v ) || < M i M max for all i = 1 , ..., r , and for all Λ ∈ Ω Λ 1 , where Ω Λ 1 ⊂ Ω Λ , and Ω Λ is the set of all 8 m × m diagonal matrices with elements in [0 , 1]; further- more, Ω Λ 1 should hav e diagonal elements λ i ∈ ( γ , 1], where γ is precisely defined later in Theorem 4. Remark 4. In order to find a non-empty set, for which, the elements of θ v satisfy the necessary condition dis- cussed abov e, an optimization problem needs to be solv ed ov er the following set, E = { vec( θ v ) : || ro w i ( B Λ θ T v − I r ) || 2 ≤ M 2 i M 2 max − , Λ ∈ Ω Λ 1 , i = 1 , ..., r } , (65) where vec( . ) : R r × m → R rm puts the elements of a ma- trix in a column v ector and is a small p ositiv e con- stan t used to hav e a close set, since typical numeri- cal optimizers only optimize ov er a close set. Note that B Λ ˜ θ T v = B Λ( θ T v − θ ∗ v T ) = B Λ θ T v − I r . The optimization problem, R 2 = min θ v v ec( θ v − θ ∗ I ) T v ec( θ v − θ ∗ I ) s.t. ro w i ( B Λ θ T v − I r ) 2 = M 2 i M 2 max − , i = 1 , ..., r , Λ ∈ Ω Λ 1 , v ec( θ v ) ∈ Ω θ , (66) whic h needs to be solved offline, finds the minim um dis- tance, R , from the vec( θ ∗ I ) to the b oundary of the set (65). Figure 3 depicts a visualization of the pro jection b oundaries for the case when there are only tw o adap- tiv e parameters, θ 1 and θ 2 . It is noted that the calcu- lated θ max i,j and θ min i,j are not unique, and different b oundaries can b e found b y defining different cost func- tions in (66). After calculating θ max i,j and θ min i,j , the pro jection parameters region is obtained as, Ω pro j = { v ec ( θ v ) : θ i,j ∈ [ θ max i,j , θ max i,j ] } . (67) Remark 5. F or all elemen ts of Ω Λ 1 , the optimization problem (66) finds the largest neighborho o d of θ ∗ I in Ω θ that satisfies the necessary condition. This neighborho o d is an n-sphere, with the center at vec( θ ∗ I ) and with the radius R . Remark 6. The reason to include θ ∗ I i,j inside the pro- jection b oundaries is that it is preferred that e conv erges Fig. 3. Pro jection b oundaries when there are tw o adaptive parameters. The circle defines the b order of the neighbor- ho o d obtained from the optimization. The square defines the pro jection b oundaries for θ 1 and θ 2 . to the smallest set around zero. F or this, θ ∗ I i,j should b e inside [ θ min i,j + ζ i,j , θ max i,j − ζ i,j ] (see (17) and (44)). In order to sho w that the optimization problem (66) is feasible, it should b e prov en that the set E alw ays includes vec( θ ∗ I ). Theorem 4. The set Υ = { v ec( θ v ) : || ro w i ( B Λ θ T v − I r ) || 2 ≤ M 2 i M 2 max − , Λ ∈ Ω Λ 1 ⊂ Ω Λ , i = 1 , ..., r } ∩ v ec( θ ∗ I ) 6 = ∅ when λ min (Λ) > γ ≡ max i (1 − q γ M i γ B i ), where λ min ( . ) denotes the minim um eigenv alue, γ B i ≡ || ro w i ( B ) |||| B T ( B B T ) − 1 || and γ M i ≡ M 2 i M 2 max − . Pro of. T o prov e the non-emptyness of Υ, we should sho w that || ro w i ( B Λ θ ∗ I T − I r ) || 2 ≤ M 2 i M 2 max − . Using (65) and the definition of θ ∗ I T = B T ( B B T ) − 1 , we hav e, || ro w i ( B Λ θ ∗ I T − I r ) || 2 = || ro w i ( B Λ B T ( B B T ) − 1 − I r ) || 2 = || ro w i ( B Λ B T ( B B T ) − 1 − B B T ( B B T ) − 1 ) || 2 = || ro w i ( B (Λ − I m ) B T ( B B T ) − 1 ) || 2 ≤|| ro w i ( B (Λ − I m )) || 2 || B T ( B B T ) − 1 || 2 ≤ ( λ max (Λ − I m )) 2 || ro w i ( B ) || 2 || B T ( B B T ) − 1 || 2 =( λ min (Λ) − 1) 2 || ro w i ( B ) || 2 || B T ( B B T ) − 1 || 2 , (68) where λ min ( . ) denotes the minimum eigenv alue. It is noted that since Λ and I m are diagonal matrices and di- 9 agonal elements of Λ are betw een zero and one, w e ha ve, ( λ max (Λ − I m )) 2 = ( λ min (Λ) − 1) 2 . Therefore, in order to show that || ro w i ( B Λ θ ∗ I T − I r ) || 2 ≤ M 2 i M 2 max − , for all i = 1 , ..., r , w e should satisfy ( λ min (Λ) − 1) 2 || ro w i ( B ) || 2 || B T ( B B T ) − 1 || 2 ≤ M 2 i M 2 max − ⇒ − r γ M i γ B i ≤ λ min (Λ) − 1 ≤ r γ M i γ B i , i = 1 , ..., r , (69) where γ B i ≡ || ro w i ( B ) |||| B T ( B B T ) − 1 || and γ M i = M 2 i M 2 max − for all i = 1 , ..., r . Since the maxim um v alue for the diagonal elemen ts of Λ is one, the only condition that should b e satisfied is that 1 − q γ M i γ B i ≤ λ min (Λ) for i = 1 , ..., r or γ ≡ max i (1 − q γ M i γ B i ) ≤ λ min (Λ). 2 Based on the ab o v e theorem, and by defining γ B i ≡ || ro w i ( B ) |||| B T ( B B T ) − 1 || , and γ ≡ max i (1 − M i γ B i M max ), the definition of Ω Λ should b e mo dified as Ω Λ 1 = { Λ : Λ ∈ D m × m , diag i (Λ) ∈ ( γ , 1] , i = 1 , ..., m } , (70) where D denotes the set of real diagonal matrices, and diag i ( . ) : R m × m → R provides the i th diagonal element of square matrices. Remark 7. Using Ω Λ 1 , defined in (70), and Ω pro j , de- fined in step 3, the upp er bound on || ro w i (∆ B ) || = || ro w i ( B Λ ˜ θ T v ) || can be found, which we denote as ¯ ρ i . Therefore, recalling that M i is defined as the upp er b ound on the absolute v alue of i th virtual con trol signal v i , the disturbance ¯ d i , which is defined after (8), should b e smaller than M i − ¯ ρ i M max , i.e. ¯ d i < M i − ¯ ρ i M max . Note that ¯ ρ i < M i M max is guaran teed b y the solution of (66). Therefore, the condition | d i | < M i is satisfied. 5 Con troller design In this section, a design pro cedure for the controller that generates the virtual con trol signal v in (63) is prop osed. During the design of the controller, the following t wo assumptions are made ab out the plant dynamics: Assumption 1. The dynamics in (63) can b e written as " ˙ x (1) ˙ x (2) # = " A 1 , 1 A 1 , 2 A 2 , 1 A 2 , 2 # " x (1) x (2) # + B v ( v + d ) , y = C " x (1) x (2) # , (71) where A 1 , 1 ∈ R ( n − r ) × ( n − r ) is a Hurwitz matrix, A 1 , 2 ∈ R ( n − r ) × r , A 2 , 1 ∈ R r × ( n − r ) , A 2 , 2 ∈ R r × r , x (1) ∈ R ( n − r ) , x (2) ∈ R r , y ∈ R r and C = [0 r × ( n − r ) I r ]. Assumption 2. The matrix B v ∈ R n × r is in the form [0 r × ( n − r ) I r ] T . Both of the ab ov e assumptions are justified for t ypical aircraft mo dels [16, 40]. In the simulation section, these assumptions are v alidated using the AeroData Mo del in Researc h Environmen t (ADMIRE) [25, 50]. Remark 8. F or system s for whic h Assumption 2 do es not hold, giv en that B v has full column rank, it is p ossible to find (see [3, 12]) a transformation matrix, T B , such that ˆ B v = T B B v = [0 r × ( n − r ) I r ] T . How ever, employing this transformation may lead to a state space realization whic h violates Assumption1. Remark 9. It is desired to design a con troller whic h mak es y = C x = x (2) follo w the reference input. Since A 1 , 1 is Hurwitz, by Assumption 1, showing that the states x (2) are bounded will b e sufficien t to demonstrate for the b oundedness of x (1) . 5.1 Dynamics on the Time V arying Sliding Sur- fac e The sliding surface, inspired by [12], is given as s ( x (2) ( t ) , x (2) ( t 0 ) , t ) = x (2) ( t ) − x (2) ( t 0 ) e − ¯ λ ( t − t 0 ) − 2 π r ( t )tan − 1 ¯ λ ( t − t 0 ) = 0 , (72) where ¯ λ > 0 is a scalar parameter, x (2) ∈ R r is defined in (71), s ∈ R r is the sliding surface, and r ( t ) ∈ R r is the reference to b e track ed. The resp onse of a system controlled by a sliding mo de con troller includes tw o phases. The first phase is called the reaching phase. During this phase, the controller 10 driv es the system tow ards the sliding surface so that s ( t ) → 0. In the second, sliding phase, the tra jectory ev olv es on the sliding manifold. F or the sliding sur- face (72), no reaching phase exists since the sliding surface is a function of the initial condition and the tra jectories are on the sliding surface at t = t 0 i.e. s ( x (2) ( t ) , x (2) ( t 0 ) , t 0 ) = 0. In the next subsection, via Theorem 5, the control law v that ensures that the tra- jectories remain on the sliding surface for all t ≥ t 0 is pro vided. Using (72), the tra jectories of x (2) on the sliding surface satisfy x (2) ( t ) = x (2) ( t 0 ) e − ¯ λ ( t − t 0 ) + 2 π r ( t )tan − 1 ¯ λ ( t − t 0 ) . (73) F or A satisfying Assumption 1, and if (73) holds, it fol- lo ws that ˙ x (1) = A 1 , 1 x (1) + A 1 , 2 [ x (2) ( t 0 ) e − ¯ λ ( t − t 0 ) + 2 π r ( t )tan − 1 ( ¯ λ ( t − t 0 ))] . (74) By defining G 1 ≡ A 1 , 2 x (2) ( t 0 ), and G 2 ( t ) = 2 π A 1 , 2 r ( t ) tan − 1 ( ¯ λ ( t − t 0 )), we hav e, ˙ x (1) = A 1 , 1 x (1) + G 1 e − ¯ λ ( t − t 0 ) + G 2 ( t ) = A 1 , 1 x (1) + g ( t ) , (75) where g ( t ) ≡ G 1 e − ¯ λ ( t − t 0 ) + G 2 ( t ). Lemma 4. When x (2) ( t ) is on the sliding surface (72), x (1) ( t ) and x (2) ( t ) are b ounded and for all t ≥ t 0 , || x (1) ( t ) || ≤ k ¯ x (1) ( t 0 ) + K 2 ¯ x (2) ( t 0 ) + K 2 ¯ r , where K 2 = k ξ || A 1 , 2 || , and where k and ξ are constants. Also, ¯ x (1) ( t 0 ), ¯ x (2) ( t 0 ) and ¯ r are the upp er b ounds of || x (1) ( t 0 ) || , || x (2) ( t 0 ) || and sup t ≥ t 0 || r ( t ) || , resp ectively . F urthermore, lim t →∞ y ( t ) = r ( t ). Pro of. Per Assumption 1, A 1 , 1 is Hurwitz, hence the homogeneous system ˙ x (1) h ( t ) = A 1 , 1 x (1) h ( t ) is globally ex- p onen tially stable at the origin. The solution of this sys- tem is given as x (1) h ( t ) = Φ( t, t 0 ) x (1) h ( t 0 ), where Φ( t, t 0 ) is the state transition matrix and there exist constan ts k > 0 and ξ > 0 such that || Φ( t, t 0 ) || ≤ k e − ξ ( t − t 0 ) , ∀ t ≥ t 0 . (76) Since the state transition matrices of ˙ x (1) h ( t ) = A 1 , 1 x (1) h ( t ) and ˙ x (1) ( t ) = A 1 , 1 x (1) ( t ) + g ( t ) are the same, w e use the state transition matrix Φ( t, t 0 ) used in (76) to provide the solution of (75) as x (1) ( t ) = Φ( t, t 0 ) x (1) ( t 0 ) + Z t t 0 Φ( t, η ) g ( η ) dη . (77) T aking the norm of b oth sides of (77), we obtain that || x (1) ( t ) || ≤ || Φ( t, t 0 ) x (1) ( t 0 ) || + Z t t 0 || Φ( t, η ) |||| g ( t ) || dη . (78) Using the definition of g ( t ) given after (75), it fol- lo ws that || g ( t ) || = || G 1 e − ¯ λt + G 2 ( t ) || ≤ || G 1 || + sup t ≥ t 0 || G 2 ( t ) || . Note that G 2 ( t ) is a function of the reference input r ( t ), and that sup t ≥ t 0 || G 3 ( t ) || exists. Therefore, || g ( t ) || ≤ || A 1 , 2 |||| x (2) ( t 0 ) || + || A 1 , 2 |||| r ( t ) || . Defining K 1 = || A 1 , 2 |||| x (2) ( t 0 ) || + || A 1 , 2 || ¯ r , where ¯ r is the upp er b ound on || r ( t ) || for t ≥ 0, and using (76), (78) can b e written as, || x (1) ( t ) || ≤ k || x (1) ( t 0 ) || e − ξ ( t − t 0 ) + k K 1 Z t t 0 e − ξ ( t − η ) dη ≤ k || x (1) ( t 0 ) || e − ξ ( t − t 0 ) + k K 1 1 ξ (1 − e − ξ ( t − t 0 ) ) ≤ k || x (1) ( t 0 ) || + k K 1 1 ξ ≤ k ¯ x (1) ( t 0 ) + K 2 ¯ x (2) ( t 0 ) + K 2 ¯ r, (79) where K 2 = k ξ || A 1 , 2 || , while ¯ x (1) ( t 0 ) and ¯ x (2) ( t 0 ) repre- sen t b ounds on || x (1) ( t 0 ) || and || x (2) ( t 0 ) || , resp ectively . Since the reference signal r ( t ), x (1) ( t 0 ) and x (2) ( t 0 ) are b ounded, (79) sho ws that x (1) ( t ) is bounded. Since x ( t 0 ) and r ( t ) are b ounded, it can b e shown, using (73), that x (2) ( t ) is bounded and conv erges to r ( t ). Since y = x (2) , this completes the pro of. 2 5.2 Contr ol L aw W e no w describ e the con trol law and c haracterize its prop erties. Definition 1. sign v ( a ), where a is a column vector, is a diagonal matrix whose elemen ts are the signs of the 11 elemen ts of the vector a . F or example, sign v ([ a 1 a 2 ] T ) = diag(sign( a 1 ) , sign( a 2 )), where a 1 and a 2 are scalars. Definition 2. | a | v ≡ sign v ( a ) a and | a T | v ≡ a T sign v ( a ), where a is a column vector and sign v ( . ) is de- fined in Definition 3. F or example, | [ a 1 a 2 ] | v = [ a 1 a 2 ]sign v ([ a 1 a 2 ] T ) = [ | a 1 | | a 2 | ], where a 1 and a 2 are scalars. Theorem 5. Consider the dynamics in (71), with dis- turbance d , t 0 = 0, and the control law, v ( t ) = − A 2 , 1 x (1) ( t ) − A 2 , 2 x (2) ( t ) − ¯ λx (2) (0) e − ¯ λt + 2 π ˙ r ( t )tan − 1 ( ¯ λt ) + 2 π r ( t ) ¯ λ 1 + ¯ λ 2 t 2 − sign v ( s ( x (2) ( t ) , x (2) (0) , t )) ρ, (80) where ρ ∈ R r con tains the upp er b ounds on the absolute v alues of the elements of the disturbance v ector d , and s ( x (2) ( t ) , x (2) (0) , t ) is the sliding surface (72). Then the tra jectories of x (2) sta y on the sliding surface (72). Pro of. Consider a Lyapuno v function candidate V 2 ( s ) = 1 2 s T s , where the arguments of s ( x (2) ( t ) , x (2) ( t 0 ) , t ) are dropp ed for clarity . By taking the deriv ative of V 2 , and using (72) with t 0 = 0, we obtain, ˙ V 2 = s T ˙ s = s T ˙ x (2) ( t ) + ¯ λx (2) (0) e − ¯ λt − 2 π ˙ r ( t )tan − 1 ( ¯ λt ) − 2 π r ( t ) ¯ λ 1 + ¯ λ 2 t 2 . (81) Using (71) and Assumption 2, we hav e ˙ x (2) ( t ) = A 2 , 1 x (1) ( t ) + A 2 , 2 x (2) ( t ) + v + d . By substituting it in (81) we hav e ˙ V 2 = s T ˙ s = s T A 2 , 1 x (1) ( t ) + A 2 , 2 x (2) ( t ) + v + d + ¯ λx (2) (0) e − ¯ λt − 2 π ˙ r ( t )tan − 1 ( ¯ λt ) − 2 π r ( t ) ¯ λ 1 + ¯ λ 2 t 2 . (82) By substituting the con trol la w (80) in to (82), and using Definitions 1 and 2, it follows that ˙ V 2 = s T [ d − sign v ( s ) ρ ] = s T d − | s T | v ρ ≤ | s T | v ( | d | v − ρ ) . (83) Fig. 4. Blo ck diagram of the closed lo op system with soft saturation. Since ρ contains the upp er b ounds on the absolute v alues of the elemen ts of the disturbance v ector d , the elements of | d | v − ρ are non-p ositive, which leads to ˙ V 2 ≤ 0, and consequen tly prov es that x (2) tra jectories which are on sliding surface at t = t 0 , will remain there for all t > 0. 2 5.3 Bounding the c ontr ol input Remark 10. Up until now, w e sho wed that the con- trol signal v given in (80) k eeps x (2) tra jectories on the sliding surface defined in (72), and as long as the states of the system remain on the sliding surface, the system output y follows the reference r while all the states re- main b ounded. In the control allo cation dev elopment, w e stated that the boundedness of the con trol signal v is ensured by using a soft saturation b ound, the limits of whic h are set in Section 4 as v i ∈ [ − M i , M i ] , i = 1 , ..., r . The o verall closed lo op system block diagram is pre- sen ted in Figure 4. In this section, we pro vide a metho d inspired by [12], to make sure that the control signal v remains within this saturation b ounds. T o ensure that | v i | ≤ M i for i = 1 , ..., r , the following inequalit y , obtained by using (80), should b e satisfied for all i = 1 , ..., r , | v i ( t ) | = − n X j =1 a 2 i,j x j ( t ) − ¯ λx n − r + i (0) e − ¯ λt + 2 π ˙ r i ( t )tan − 1 ( ¯ λt ) + 2 π r i ( t ) ¯ λ 1 + ¯ λ 2 t 2 − ¯ s i ( x ( t )) ρ i ≤ M i , (84) where x j , r i , ˙ r i and ρ i denote the j th component of x ( t ) and i th comp onen ts of r ( t ), ˙ r ( t ) and ρ , resp ec- tiv ely . Moreov er, ¯ s i ( x ( t )) is the i th diagonal element of sign v ( s ( x (2) ( t ) , x (2) (0) , t )). Defining A 1 = [ A 1 , 1 A 1 , 2 ], A 2 = [ A 2 , 1 A 2 , 2 ], where A i,j is defined in (74), a 2 i,j refer to the elemen ts of A 2 . Using the inequalities | a − b | < | a | + | b | and | a + b | < | a | + | b | for t wo scalars a and b , 12 it can b e shown that satisfying the following inequality , ensures (84): n X j =1 a 2 i,j x j + ¯ λx n − r + i (0) e − ¯ λt + 2 π ˙ r i tan − 1 ( ¯ λt ) + 2 π r i ¯ λ 1 + ¯ λ 2 t 2 ≤ ( M i − ρ i ) . (85) Remem b ering that ρ i is the upp er b ound of the distur- bance element d i , and | d i | is alwa ys smaller than M i (see Remark 4), we obtain that ( M i − ρ i ) > 0, meaning that the right hand side of the inequality (85) is p ositive. It can then b e sho wn that satisfying the follo wing in- equalit y ensures (85) n X j =1 a 2 i,j x j + ˙ r i − M i + ρ i + ¯ λ x n − r + i (0) + 2 π r i ≤ 0 . (86) Remem b ering that x (1) = [ x 1 , ..., x n − r ] T and x (2) = [ x n − r +1 , ..., x n ] T , and using (73), it follo ws that | x n − r + i ( t ) | ≤ | x n − r + i (0) | + | r i ( t ) | for i = 1 , ..., r , and || x (1) ( t ) || ≥ x j for all j = 1 , ..., n − r . n − r X j =1 a 2 i,j x j + n X j = n − r +1 a 2 i,j | x n − r + i (0) | + | r i | + ˙ r i − M i + ρ i + ¯ λ x n − r + i (0) + 2 π r i ≤ 0 . (87) F urthermore, the upp er b ound of || x (1) ( t ) || is obtained in Lemma 4. Therefore, defining ¯ x (1) (0), ¯ x (2) (0), ¯ r , ¯ r i and ¯ ˙ r i as b ounds on || x (1) (0) || , || x (2) (0) || , || r ( t ) || , | r i ( t ) | and | ˙ r i ( t ) | , it can b e shown that satisfying the follo wing inequalit y ensures (86): n − r X j =1 a 2 i,j k ¯ x (1) (0) + (1 + K 2 ) ¯ x (2) (0) + K 2 ¯ r + ¯ r i + ¯ ˙ r i − M i + ρ i + ¯ λ ¯ x (2) (0) + 2 π ¯ r i ≤ 0 , (88) where k and K 2 are defined in Lemma 4. Equation (88) can b e rewritten as W i, 1 + ¯ λW i, 2 ≤ 0 , (89) where W i, 1 is the first term, and W i, 2 is the term multi- plying ¯ λ in (88). Note that W i, 1 and W i, 2 are functions of ¯ x (1) (0), ¯ x (2) (0), ¯ r i , and ¯ ˙ r i and remain constant along the closed-lo op tra jectory . Since W i, 2 is p ositive, a v alue of ¯ λ > 0 satisfying (89) can alw ays be found if W i, 1 < 0, whic h can b e realized b y putting suitable b ounds on ¯ x (1) (0), ¯ x (2) (0), ¯ r , ¯ r i and ¯ ˙ r i . A step by step design pro- cedure to determine the controller parameters is given in the App endix. 6 SIMULA TION RESUL TS The Aero data Model in Research En vironment (AD- MIRE), which represents the dynamics of an ov er- actuated aircraft mo del, is used to demonstrate the effectiv eness of the adaptiv e control allocation in the presence of uncertain ty . The linearized ADMIRE model is introduced in [25], and is given b elow: x = [ α β p q r ] T y = [ p q r ] T u = [ u c u re u le u r ] T ˙ x = Ax + B u u = Ax + B v v v = B u, B u = B v B , B v = " 0 2 × 3 I 3 × 3 # , (90) where α, β , p, q and r are the angle of attac k, sideslip angle, roll rate, pitch rate and ya w rate, resp e ctiv ely . u represen ts the control surface deflections v ector whic h consists of canard wings, righ t and left elevons and the rudder. The state and control matrices are given by: A = − 0 . 5432 0 . 0137 0 0 . 9778 0 0 − 0 . 1179 0 . 2215 0 − 0 . 9661 0 − 10 . 5123 − 0 . 9967 0 0 . 6176 2 . 6221 − 0 . 0030 0 − 0 . 5057 0 0 0 . 7075 − 0 . 0939 0 − 0 . 2127 , (91) 13 B u = 0 . 0069 − 0 . 0866 − 0 . 0866 0 . 0004 0 0 . 0119 − 0 . 0119 0 . 0287 0 − 4 . 2423 4 . 2423 1 . 4871 1 . 6532 − 1 . 2735 − 1 . 2735 0 . 0024 0 − 0 . 2805 0 . 2805 − 0 . 8823 . (92) The p osition limits of the control surfaces are given as u c ∈ [ − 55 , 25] × π 180 r ad, u re , u le , u r ∈ [ − 30 , 30] × π 180 r ad, with first-order dynamics and a time constan t of 0 . 05( sec ). Note that the control surfaces influence on deriv ativ es of the first tw o states i.e. ˙ α and ˙ β is ne- glected, that is the control surfaces are considered to b e pure momen t generators, so that control allo cation implemen tation b ecomes p ossible [25]. T o represent actuator loss of effectiveness and distur- bance, a diagonal matrix Λ and a vector d u , resp ectively , are augmented to the mo del (90) as ˙ x = Ax + B u Λ u + B u d u = Ax + B v v + B v ¯ d v = B Λ u, ¯ d = B d u , B u = B v B , B v = " 0 2 × 3 I 3 × 3 # . (93) The system (93) with state and input matrices (92) can b e decomp osed into tw o subsystems: " ˙ α ˙ β # = " − 0 . 5432 0 . 0137 0 − 0 . 1179 # " α β # + " 0 0 . 9778 0 0 . 2215 0 − 0 . 9661 # p q r , ˙ p ˙ q ˙ r = 0 − 10 . 5123 2 . 6221 − 0 . 0030 0 0 . 7075 " α β # + − 0 . 9967 0 0 . 6176 0 − 0 . 5057 0 − 0 . 0939 0 − 0 . 2127 p q r + v + ¯ d. These tw o subsystem representation satisfy the assump- tions required for implementing the sliding mode con- troller design in the previous section. In the simulations, the disturbance ¯ d is a sin usoidal function with ampli- tude 0 . 1 and frequency 1 rad/s while a zero-mean white Gaussian noise with standard deviation σ x = 0 . 0035 rad represen ts the measuremen t noise. F ollowing the steps in the App endix, the controller design parameter ¯ λ is calculated as ¯ λ = 3. In addition, to av oid chattering, a b oundary lay er approach is implemented [9]. The sim ulation results for a conv entional pseudo in verse based con trol allocation are rep orted in Figure 5 for the case without actuator loss of effectiv eness, that is, Λ 1 = I . With the actuator loss of effectiveness mo deled as Λ 2 ( t ) = ( diag (1 , 1 , 1 , 1) f or t < 7( sec ) , diag (0 . 85 , 0 . 85 , 0 . 85 , 0 . 85) f or t ≥ 7( sec ) , the sim ulation results for the conv entional control allo- cation are given in Figure 6. It is seen that 15% loss of effectiv eness in all actuators at t = 7 sec causes instabil- it y . The proposed adaptive control allo cation introduced in Section I I I will be used in the follo wing sim- ulations. Using Steps 1-3 in Section IV, the v al- ues of M 1 = 1 . 4, M 2 = 1 . 4 and M 3 = 0 . 3 are obtained and Ω pro j , which determines the maxi- m um and minimum of eac h element of the adap- tiv e parameter matrix is computed corresp onding to θ v 1 , 1 ∈ [ − 0 . 0129 , 0 . 0129], θ v 1 , 2 ∈ [0 . 0307 , 0 . 5225], θ v 1 , 3 ∈ [ − 0 . 1357 , 0 . 1371], θ v 1 , 4 ∈ [ − 0 . 212 , 0], θ v 2 , 1 ∈ [ − 0 . 3149 , − 0 . 1113], θ v 2 , 2 ∈ [ − 0 . 217 , − 0 . 1416], θ v 2 , 3 ∈ [ − 0 . 0241 , 0 . 2363], θ v 2 , 4 ∈ [ − 0 . 4162 , − 0 . 01], θ v 3 , 1 ∈ [0 . 1587 , 0 . 1977], θ v 3 , 2 ∈ [0 . 0673 , 0 . 0675], θ v 3 , 3 ∈ [ − 0 . 001 , 0 . 001], θ v 3 , 4 ∈ [ − 1 . 2755 , − 0 . 7641]. W e use a closed lo op reference mo del with l = 4 and A m selected as A m = − 0 . 2 0 0 0 0 . 1 0 0 0 0 . 1 . Figure 7 shows the simulation results for the system with our adaptive control allo cation and the actuator loss of effectiv eness matrix Λ 2 ( t ). 14 It is seen that the first t w o states, α and β , are b ounded, and the other states ( p , q and r ) follow the reference inputs ( p ref , q ref and r ref ) ev en after the introduction of 30% actuator loss of effectiveness at t = 7 sec. Also, it is seen that the elements of ( B Λ u ) i for i = 1 , 2 , 3, con verge to the virtual control signal elemen ts v i for i = 1 , 2 , 3. The time histories of the adaptiv e parameters, which are the elements of θ v matrix, are shown in Figure 8. Tw o adaptiv e parameters are selected to illustrate their deviation inside their pro jection b oundaries in Figure 10. Another scenario is considered next, where a 50% loss of effectiveness for the control surfaces are simulated, sp ecifically , with Λ 3 ( t ) = ( diag (1 , 1 , 1 , 1) f or t < 7( sec ) , diag (0 . 5 , 0 . 5 , 0 . 5 , 0 . 5) f or t ≥ 7( sec ) . It is seen in Figure 9 that the system remains stable after the introduction of the loss of effectiveness. The time histories of the adaptiv e parameters, whic h are the elemen ts of θ v matrix, are sho wn in Figure 11. Moreov er, t w o adaptive parameters are selected to illustrate their deviation within their pro jection b oundaries in Figure 12. 7 SUMMAR Y An adaptive control allo cation for uncertain ov er- actuated systems with actuator saturation is proposed in this pap er. The metho d needs neither uncertain ty iden tification nor p ersistence of excitation. A sliding mo de controller with time-v arying sliding surface is also prop osed, to guarantee the stabilit y of the ov erall closed lo op system while realizing reference tracking. The simulation results with the ADMIRE model sho w the effectiveness of the prop osed metho d. A Con troller design procedure The following pro cedure can b e follo wed to obtain the con troller design parameters: Step 1- Use Step 1 in Section IV, to determine M i , i = 1 , ..., r . Step 2- Calculate Ω θ using Step 2 in Section IV. 0 5 10 15 20 0 0.1 0.2 0.3 0 5 10 15 20 -0.05 0 0.05 0 5 10 15 20 0 0.2 0.4 0 5 10 15 20 0 0.1 0.2 0.3 0 5 10 15 20 0 0.05 0.1 0 5 10 15 20 Time(s) -0.5 0 0.5 0 5 10 15 20 -1 0 1 0 5 10 15 20 -1 0 1 0 5 10 15 20 -0.2 0 0.2 0 5 10 15 20 -1 -0.5 0 0.5 0 5 10 15 20 -0.5 0 0.5 0 5 10 15 20 Time(s) -0.5 0 0.5 Fig. 5. System states, virtual control signals and actuators’ deflections using conv entional control allo cation when actu- ator loss of effectiveness is Λ 1 = I . Step 3- Using Theorem 4, calculate γ ≡ max i (1 − q γ M i γ B i ), where M max = max i M i , γ M i ≡ M 2 i M 2 max − for a small p ositive , and γ B i ≡ || ro w i ( B ) |||| B T ( B B T ) − 1 || . Step 4- Using γ , obtain Ω Λ 1 in (70). Step 5- Solve the optimization problem (66), which leads to obtaining the Ω pro j , which is defined in Section IV, step 3. Step 6- Using (70) and Ω pro j , calculate ¯ ρ i for i = 1 , ..., r , whic h are defined in Remark 4. Step 9- Calculate k and ξ using (76). Step 10- In the proposed controller design, since the con trollers’ goal is reference tracking in the presence of 15 0 5 10 15 20 0 0.5 1 0 5 10 15 20 -0.05 0 0.05 0 5 10 15 20 0 0.2 0.4 0 5 10 15 20 0 0.5 1 0 5 10 15 20 0 0.05 0.1 0 5 10 15 20 Time(s) -0.5 0 0.5 0 5 10 15 20 -1 0 1 0 5 10 15 20 -1 0 1 0 5 10 15 20 -0.2 0 0.2 0 5 10 15 20 -1 -0.5 0 0.5 0 5 10 15 20 -0.5 0 0.5 0 5 10 15 20 Time(s) -0.5 0 0.5 Fig. 6. System states, virtual control signals and actuators’ deflections using conv entional control allo cation when actu- ator loss of effectiveness is Λ 2 . saturation, the initial states, x (1) (0) and x (2) (0), the ele- men ts of reference input, r , the elements of the deriv ative of the reference input, ˙ r , and the elements of disturbance ¯ d , should b e b ounded. Let ¯ x (1) (0), ¯ x (2) (0), ¯ r i , ¯ ˙ r i and ¯ L i b e upp er b ounds on the norms of x (1) (0), x (2) (0), r i , ˙ r i and ¯ d i , resp ectively , for i = 1 , ..., r . These v alues can b e obtained b y an exp ert, who has information ab out the plan t and its constrain ts. Also, these v alues can be writ- ten in the data sheets. Step 11- Check if W i, 1 < 0. If y es , contin ue to the next step. If no , the exp ert should reduce ¯ x (1) (0), ¯ x (2) (0), ¯ r i , ¯ ˙ r i and ¯ L i to satisfy this inequality . Most of the time, this is done by confining the initial v alue of states to a smaller Fig. 7. System states, virtual control signals and actuators’ deflections using adaptive control allo cation, when actuator loss of effectiveness matrix is Λ 2 . 0 2 4 6 8 10 12 14 16 18 20 Time(s) -1.2 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 Fig. 8. Adaptive parameters when the actuator loss of effec- tiv eness matrix is Λ 2 . 16 Fig. 9. System states, virtual control signals and actuators’ deflections using adaptive control allo cation when actuator loss of effectiveness matrix is Λ 3 . 0 2 4 6 8 10 12 14 16 18 20 Time(s) -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 Fig. 10. Two adaptive parameters and their pro jection b oundaries when the actuator loss of effectiveness matrix is Λ 2 . The dashed lines are the pro jection b oundaries. 0 2 4 6 8 10 12 14 16 18 20 Time(s) -1.5 -1 -0.5 0 0.5 1 Fig. 11. Adaptive parameters when the actuator loss of ef- fectiv eness matrix is Λ 3 . 0 2 4 6 8 10 12 14 16 18 20 Time(s) -0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 Fig. 12. Two adaptive parameters and their pro jection b oundaries when the actuator loss of effectiveness matrix is Λ 3 . The dashed lines are the pro jection b oundaries. limit. In this design, it can be done even by reducing the deriv ativ e of the reference input, if fast maneuver is not required in the plant. Step 12- Calculate W i, 2 in (89). Step 13- Find a ¯ λ satisfying (89) and design the control signal (80). References [1] Diana M Acosta, Yildira y Yildiz, Rob ert W Craun, Stev en D Beard, Michael W Leonard, Gordon H Hardy , and Michael W einstein. Piloted ev aluation of a control allocation technique to recov er from pilot-induced oscillations. Journal of Air cr aft , 52(1):130–140, 2014. [2] Halim Alwi and Christopher Edwards. F ault tolerant control using sliding modes with on-line con trol allo cation. Automatic a , 44(7):1859–1866, 2008. 17 [3] Panos J Antsaklis and Anthon y N Michel. Line ar systems . Springer Science & Business Media, 2006. [4] Marc Bodson. Ev aluation of optimization metho ds for control allocation. Journal of Guidanc e, Contr ol, and Dynamics , 25(4):703–711, 2002. [5] Kenneth A Bordignon. Constr aine d c ontrol al lo c ation for systems with r e dundant c ontr ol effe ctors . PhD thesis, Virginia T ec h, 1996. [6] Ab delk ader Bouarfa, Marc Bodson, and Maurice F adel. A fast activ e-balancing metho d for the 3-phase m ultilevel flying capacitor in verter derived from control allo cation theory . IF AC-Pap ersOnLine , 50(1):2113–2118, 2017. [7] James M Buffington and Dale F Enns. Lyapuno v stability analysis of daisy chain control allo cation. Journal of Guidanc e, Contr ol, and Dynamics , 19(6):1226–1230, 1996. [8] Alessandro Casav ola and Eman uele Garone. F ault-toleran t adaptive control allo cation sc hemes for o veractuated systems. International Journal of R obust and Nonline ar Contr ol , 20(17):1958–1980, 2010. [9] Min-Shin Chen, Y ean-Ren Hwang, and Masay oshi T omizuk a. A state-dep endent b oundary lay er design for sliding mode control. IEEE tr ansactions on automatic contr ol , 47(10):1677–1681, 2002. [10] Mou Chen, Sh uzhi Sam Ge, Bernard V o on Ee How, and Y oo Sang Cho o. Robust adaptive p osition mo oring control for marine vessels. IEEE T r ansactions on Control Systems T e chnolo gy , 21(2):395–409, 2013. [11] Maria Letizia Corradini and Andrea Cristofaro. A nonlinear fault-toleran t thruster allo cation arc hitecture for underwater remotely op erated vehicles. IF AC- Pap ersOnLine , 49(23):285–290, 2016. [12] Maria Letizia Corradini, Andrea Cristofaro, and Giuseppe Orlando. Robust stabilization of multi input plants with saturating actuators. IEEE T r ansactions on Automatic Contr ol , 55(2):419–425, 2010. [13] Andrea Cristofaro and T or Arne Johansen. F ault tolerant control allocation using unkno wn input observ ers. Automatic a , 50(7):1891–1897, 2014. [14] Andrea Cristofaro, Marios M Polycarpou, and T or Arne Johansen. F ault diagnosis and fault-tolerant control allocation for a class of nonlinear systems with redundant inputs. In 2015 54th IEEE Confer enc e on De cision and Contr ol (CDC) , pages 5117–5123. IEEE, 2015. [15] Murat Demirci and Metin Gok asan. Adaptive optimal control allocation using lagrangian neural net w orks for stability control of a 4ws–4wd electric vehicle. T r ansactions of the Institute of Me asur ement and Control , 35(8):1139–1151, 2013. [16] Guillaume JJ Ducard. F ault-toler ant flight c ontr ol and guidanc e systems: Pr actic al methods for smal l unmanned aerial vehicles . Springer Science & Business Media, 2009. [17] W ayne Durham, Kenneth A. Bordignon, and Roger Beck. Air cr aft Contr ol al lo c ation . Springer Science & Business Media, 2009. [18] W ayne C Durham. Constrained control allo cation. Journal of Guidance, c ontr ol, and Dynamics , 16(4):717–725, 1993. [19] Christopher Edwards, Thomas Lombaerts, Hafid Smaili, et al. F ault tolerant flight control. L e ctur e Notes in Contr ol and Information Sciences , 399:1–560, 2010. [20] Guillermo P F alcon ´ ı and Florian Holzapfel. Adaptive fault tolerant control allo cation for a hexacopter system. In Americ an Contr ol Conferenc e (ACC), 2016 , pages 6760– 6766. IEEE, 2016. [21] Sergio Galeani and Mario Sassano. Data-driv en dynamic control allo cation for uncertain redundant plants. In 2018 IEEE Confer enc e on De cision and Contr ol (CDC) , pages 5494–5499. IEEE, 2018. [22] T ravis E Gibson, Zheng Qu, Anuradha M Annaswam y , and Eugene Lavretsky . Adaptive output feedback based on closed- loop reference mo dels. IEEE T r ansactions on Automatic Contr ol , 60(10):2728–2733, 2015. [23] Witold Gierusz and Miroslaw T omera. Logic thrust allo cation applied to multiv ariable control of the training ship. Contr ol Engine ering Pr actice , 14(5):511–524, 2006. [24] Ola H¨ arkeg ˚ ard. Efficien t active set algorithms for solving constrained least squares problems in aircraft con trol allocation. In De cision and Contr ol, 2002, Pr o ce e dings of the 41st IEEE Conferenc e on , v olume 2, pages 1295–1300. IEEE, 2002. [25] Ola H¨ arkeg ˚ ard and S T ork el Glad. Resolving actuator redundancy optimal con trol vs. control allo cation. Automatic a , 41(1):137–144, 2005. [26] T or A Johansen and Thor I F ossen. Control allo cationa survey . Automatic a , 49(5):1087–1103, 2013. [27] T or A Johansen, Thomas P F uglseth, Petter Tøndel, and Thor I F ossen. Optimal constrained con trol allocation in marine surface vessels with rudders. Contr ol Engine ering Pr actic e , 16(4):457–464, 2008. [28] Martin Kirchengast, Martin Steinberger, and Martin Horn. Input matrix factorizations for constrained control allocation. IEEE T r ansactions on Automatic Contr ol , 63(4):1163–1170, 2018. [29] Eugene Lavretsky and T ra vis E Gibson. Pro jection op erator in adaptive systems. arXiv pr eprint arXiv:1112.4232 , 2011. [30] F Liao, K-Y Lum, JL W ang, and M Benosman. Adaptive control allo cation for non-linear systems with in ternal dynamics. IET c ontr ol the ory & applic ations , 4(6):909–922, 2010. [31] John AM Petersen and Marc Bo dson. Constrained quadratic programming tec hniques for con trol allocation. IEEE T r ansactions on Contr ol Systems T e chnolo gy , 14(1):91–98, 2006. [32] T arun Kan ti P o dder and Nilanjan Sarkar. F ault-toleran t control of an autonomous underwater vehicle under thruster redundancy . R ob otics and Autonomous Systems , 34(1):39– 52, 2001. [33] M Ehsan Raoufat, Kevin T omsovic, and Seddik M Djouadi. Dynamic control allo cation for damping of in ter- 18 area oscillations. IEEE T r ansactions on Power Systems , 32(6):4894–4903, 2017. [34] Iman Sadeghzadeh, Abbas Chamseddine, Y oumin Zhang, and Didier Theilliol. Control allo cation and re-allo cation for a modified quadrotor helicopter against actuator faults. IF AC Pr o ce e dings V olumes , 45(20):247–252, 2012. [35] Qiang Shen, Danw ei W ang, Senqiang Zh u, and Eng Kee P oh. Inertia-free fault-tolerant spacecraft attitude tracking using control allocation. A utomatica , 62:114–121, 2015. [36] Qiang Shen, Danw ei W ang, Senqiang Zh u, and Eng Kee P oh. Robust control allo cation for spacecraft attitude tracking under actuator faults. IEEE T r ansactions on Contr ol Systems T e chnolo gy , 25(3):1068–1075, 2017. [37] Asgeir J Sørensen. A survey of dynamic p ositioning control systems. Annual r eviews in c ontr ol , 35(1):123–136, 2011. [38] Mikkel Esk e Nørgaard Sørensen, Søren Hansen, Morten Breivik, and Mogens Blanke. Performance comparison of controllers with fault-dep endent control allo cation for uavs. Journal of Intel ligent & R ob otic Systems , 87(1):187–207, 2017. [39] Johannes Stephan and W alter Fich ter. F ast exact redistributed pseudoinv erse metho d for linear actuation systems. IEEE T r ansactions on Contr ol Systems T e chnolo gy , (99):1–8, 2017. [40] Brian L Stevens, F rank L Lewis, and Eric N Johnson. Air cr aft c ontr ol and simulation: dynamics, contr ols design, and autonomous systems . John Wiley & Sons, 2015. [41] Hamid D T aghirad and Y ousef B Bedoustani. An analytic- iterative redundancy resolution sc heme for cable-driv en redundant parallel manipulators. IEEE T ransactions on R ob otics , 27(6):1137–1143, 2011. [42] Johannes Tjønn ˚ as and T or A Johansen. Adaptiv e control allocation. A utomatica , 44(11):2754–2765, 2008. [43] Johannes Tjønn ˚ as and T or A Johansen. Stabilization of automotive vehicles using active steering and adaptive brake control allo cation. IEEE T r ansactions on Contr ol Systems T e chnolo gy , 18(3):545–558, 2010. [44] Seyed Shahabaldin T ohidi, Ali Khaki Sedigh, and David Buzorgnia. F ault tolerant con trol design using adaptive control allo cation based on the pseudo inv erse along the null space. International Journal of R obust and Nonline ar Contr ol , 26(16):3541–3557, 2016. [45] Seyed Shahabaldin T ohidi, Yildira y Yildiz , and Ilya Kolmanovsky . F ault toleran t control for ov er-actuated systems: An adaptiv e correction approac h. In Americ an Contr ol Confer enc e (ACC), 2016 , pages 2530–2535. IEEE, 2016. [46] Seyed Shahabaldin T ohidi, Yildira y Yildiz , and Ilya Kolmanovsky . Adaptive control allo cation for ov er-actuated systems with actuator saturation. volume 50, pages 5492– 5497. Elsevier, 2017. [47] Seyed Shahabaldin T ohidi, Yildira y Yildiz , and Ilya Kolmanovsky . Pilot induced oscillation mitigation for unmanned aircraft systems: An adaptive control allo cation approach. In 2018 IEEE Confer enc e on Contr ol T e chnolo gy and Applications (CCT A) , pages 343–348. IEEE, 2018. [48] John Virnig and David Bodden. Multiv ariable control allocation and control law conditioning when con trol effectors limit. In Guidanc e, Navigation, and Contr ol Conferenc e , page 3609, 1994. [49] Yildiray Yildiz and Ilya Kolmano vsky . Implementation of capio for comp osite adaptive control of cross-coupled unstable aircraft. In Infote ch@ A er osp ace 2011 , page 1460. 2011. [50] Yildiray Yildiz and Ily a Kolmanovsky . Stability prop erties and cross-coupling p erformance of the control allocation scheme capio. Journal of Guidanc e, Contr ol, and Dynamics , 34(4):1190–1196, 2011. [51] Yildiray Yildiz and Ily a V Kolmano vsky . A control allocation technique to reco v er from pilot-induced oscillations (capio) due to actuator rate limiting. In Pr o c e e dings of the 2010 Americ an Contr ol Conferenc e , pages 516–523. IEEE, 2010. [52] Yildiray Yildiz, Ily a V Kolmano vsky , and Diana Acosta. A con trol allo cation system for automatic detection and compensation of phase shift due to actuator rate limiting. In Pr o ce e dings of the 2011 Americ an Contr ol Confer enc e , pages 444–449. IEEE, 2011. [53] Luca Zaccarian. Dynamic allocation for input redundan t control systems. Automatic a , 45(6):1431–1438, 2009. [54] Y oumin Zhang and Jin Jiang. Bibliographical review on reconfigurable fault-toleran t control systems. A nnual r eviews in contr ol , 32(2):229–252, 2008. 19
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment