입력 지연 및 미모델링 동적을 고려한 출력 피드백 추적 제어
본 논문은 입력에 존재하는 고주파 미모델링 이득과 시간 지연을 포함한 비선형 불확실 시스템에 대해, 입력 재정의와 가산 상태 분해(additive state decomposition)를 이용해 불확실성을 출력 측면의 등가 교란으로 통합하고, 이를 기반으로 출력 피드백 추적 제어기를 설계한다. 세 가지 벤치마크 예제로 제안 방법의 유효성을 검증한다.
저자: Quan Quan, Hai Lin, Kai-Yuan Cai
본 논문은 입력에 존재하는 고주파 미모델링 이득과 시간 지연을 동시에 고려해야 하는 비선형 단입·단출(SISO) 시스템의 출력 피드백 추적 제어 문제를 다룬다. 서론에서는 파라미터 불확실성·외란만을 다룬 기존 연구와 달리, 실제 항공 제어 등에서 흔히 발생하는 미모델링 동적·입력 지연이 제어 성능에 미치는 부정적 영향을 강조한다. 특히 Rohrs 예제와 같은 고전적인 사례를 통해 기존 적응 제어나 L1 제어가 이러한 불확실성에 취약함을 지적한다.
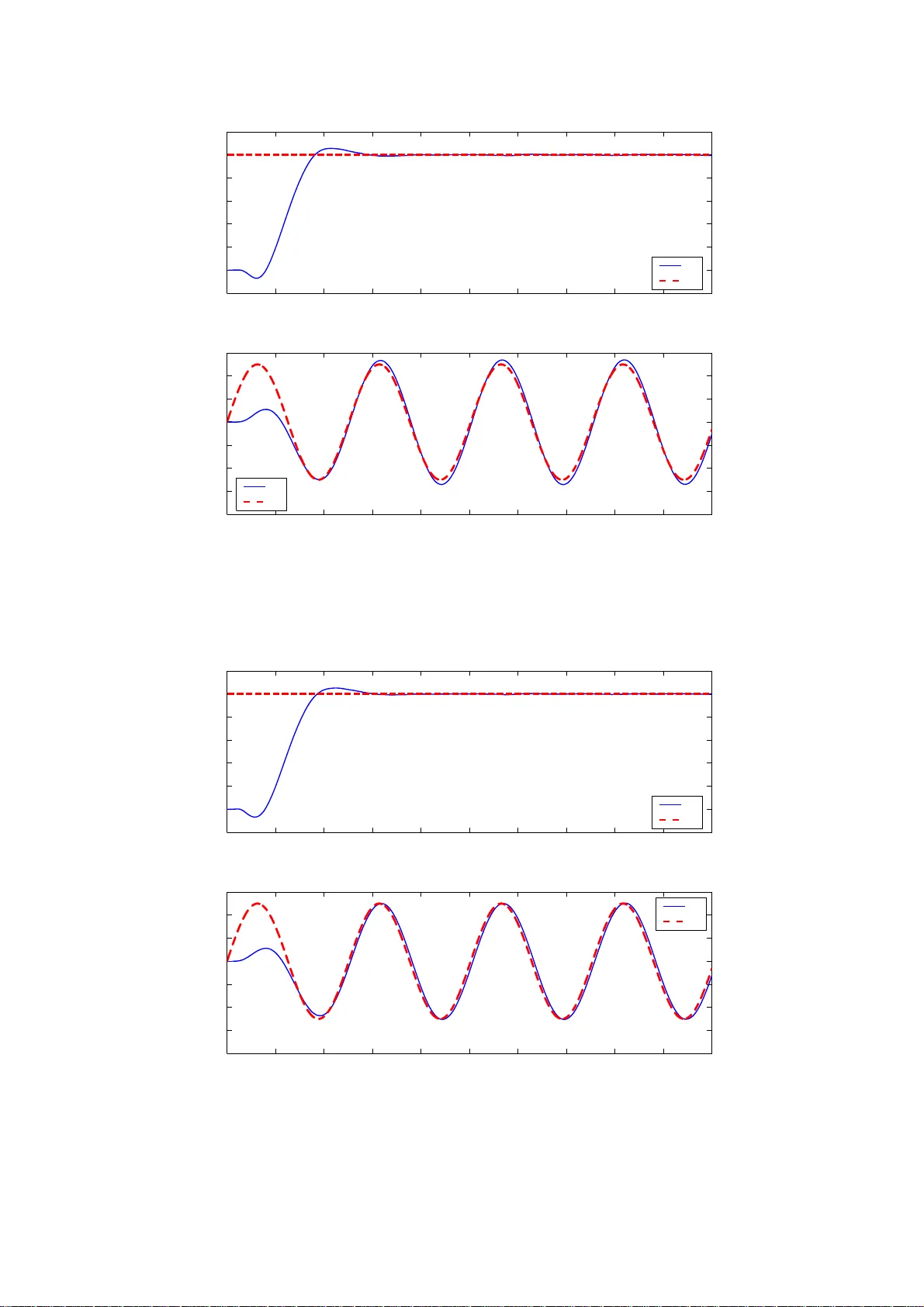
문제 정의에서는 시스템(1)을 제시하고, 입력 u_ξ(s)=H(s)e^{-τs}u(s) 로 모델링한다. 여기서 H(s)는 안정적인 고주파 이득, τ는 입력 지연이다. Assumption 1은 f(t,x,θ)의 0점 및 전역 리프시츠 안정성을 보장하고, Assumption 2는 알려진 필터 C(s)와 H(s), τ 사이의 L1‑노름 관계를 통해 ξ(t)의 유계성을 확보한다. 목표는 출력 y가 원하는 궤적 r(t)를 최종적으로 작은 오차 범위 내에서 추적하도록 제어기 u를 설계하는 것이다.
핵심 아이디어는 두 단계로 구성된다. 첫 번째는 입력 재정의 단계이다. 제어 명령 v를 포화 함수 σ_a(v)와 필터 C(s) 를 통과시켜 u(s)=C(s)
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기