Output Feedback Tracking Control for a Class of Uncertain Systems subject to Unmodeled Dynamics and Delay at Input
Besides parametric uncertainties and disturbances, the unmodeled dynamics and time delay at the input are often present in practical systems, which cannot be ignored in some cases. This paper aims to solve output feedback tracking control problem for…
Authors: Quan Quan, Hai Lin, Kai-Yuan Cai
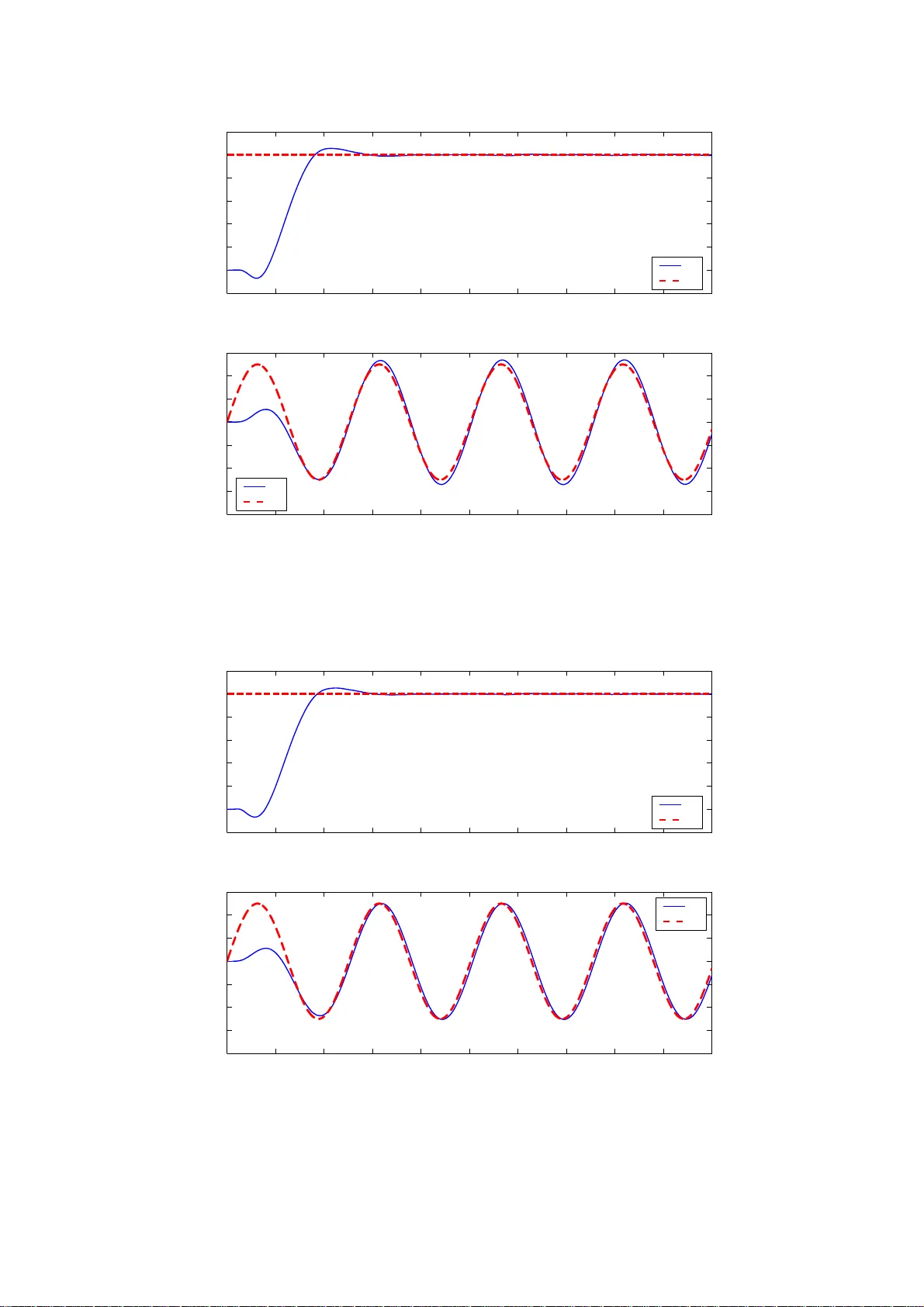
1 Output F eedback T racking Control f or a Class of Uncertain Systems subject to Unmodeled Dynamics an d Delay at Input Quan Quan, Hai Lin, Kai-Y uan Cai Abstract Besides parametric un certainties an d disturb ances, the un modeled dyna mics and time delay at the input are often pr esent in prac tical systems, which cannot b e ign ored in some cases. This paper aims to solve outp ut feedback tracking contro l problem for a class of non linear uncertain systems subject to unmodeled high-freque ncy gains and time delay at the input. By th e additiv e state decomp osition, the uncertain system is tra nsformed to an u ncertainty -free system, where the uncertainties, disturbanc e and ef fect of unmod eled dynamics p lus time delay are lumped into a new disturbanc e at the ou tput. Sequen tly , ad ditiv e state decompo sition is used to decompo se the tran s- formed system, which simplifies the tracking con troller d esign. T o d emonstrate the effecti veness, the pro posed control scheme is app lied to three bench mark examples. Index T erms Additive state d ecompo sition, tracking , inp ut d elay , un modeled dynam ics, outpu t feed back, nonlinear systems. I . I N T RO D U C T I O N T racking control of an uncertain system is a chall enging problem. Most of research mainly focuses on systems subject to parametric un certainties and addi tiv e disturbances [1]-[3]. Also, some research focuses on systems subject to uncertainties at t he input, su ch as backlash, dead zone o r other nonlinearities [4]-[5]. It i s well kno wn that unmodeled dyn amics and time delay at t he input are also often present in practical syst ems. For e xample, the unmodeled dynami cs and time delay at the inp ut often exist i n flight control systems [6]-[8 ]. These uncertainties at th e inpu t may produce a significant d egradation in the tracking performance o r even cause Quan Quan is with Department of Automatic Control, B eihang Uni versity , Beijing, 100191, China, was with Department of Electrical and Computer E ngineering, National Uni versity of Singapore, Singapore, 117576, S ingapore. Email: (see http://quanquan .buaa.edu.cn). Hai Lin is with Department of Electrical and Computer Engineering, National Univ ersity of S ingapore, Singapore, 117 576, Singapore. Kai-Y uan Cai is with Department of Automa tic Control, Beihang University , Beijing, 100191, China. October 31, 2018 DRAFT 2 instabilit y if not dealt with properly . In the literature, there are so me academic examples to demonstrate that uncertaint ies at the input cannot be ign ored in som e cases. For example, in [9], the authors con structed a simple e xample, later kno wn as Rohrs’ example, to sh ow that con ventional adapt iv e cont rol algo rithms l ose their robustness in the presence o f unmodeled dynamics. Also, some control algorithms m ay lose their rob us tness in the presence o f input delay , see for example the repetitive control example considered in [10]. Therefore, it is important to explicitly consider unmodeled dyn amics and ti me delay at the i nput in th e controller design. In this paper , the outp ut feedback tracking cont rol problem is in vestigated for a class of si ngle-input single-output (S ISO) n onlinear syst ems subject to mismatching parametric uncertainty , mismatching addi tiv e disturbances, u nmodeled high-frequency gains and time delay at the input. Before introdu cing our main idea, some accepted control methods in the literature to handl e uncertainties are briefly revie wed. A nature way is to estimate all of the unknown parameters, then compensate for them. In [11], the tracking problem for a linear system subject to un known parameters and t he unknown inp ut delay was considered, where bot h the parameters and input delay w ere estimated by the propos ed method. Howe ver , this met hod cannot handle unparameterized uncertainties such as unmodeled hi gh-frequency gains. Th e second way is to design adaptive control with robustness against unmodeled dynamics and tim e delay at t he input. In [12], the Rohrs’ example and the t wo-cart example, which are tracking problems for uncertain linear systems subject to unmodeled dynamics and time delay at t he i nput respectively , were revisited by the L 1 adaptiv e control. In [13], the authors analy zed that their proposed method is robust against time d elay at the input. The third way is to con vert a tracking probl em to a stabilizati on problem by the idea of internal model prin ciple [14], i f disturbances or desi red trajectories are limit ed to a special case. In [15], the problem of set point output tracking o f an uncertain linear system with m ultiple delays in both the state and control vectors was considered. There also exist oth er methods to handle uncertainties. Howe ver , some of them such as high-gain feedback cannot be applied to the considered s ystem directly as they rely on rapid changing control sig nal to attenuate uncertainties and disturbance. After passing unmo deled high-frequency gains or time delay at the in put, the rapid changing control signal will be distorted a lot which will affec t the feedback and then may dest abilize the system. This explains w hy high-gain feedback is often a voided in practice. Compared with these existing literature, the problem st udied in this paper i s more general October 31, 2018 DRAFT 3 since not only t he uncertainties at the i nput b ut also the output feedbac k and mismatchi ng are considered. For output feedback, the state needs to be estimated which is diffic ult mainly due to the uncertainti es and distu rbances in the s tate equation. Even if parameters and disturbance can be estimated, it is also diffi cult to com pensate for mismatchin g uncertain parameters and disturbance directly . T o t ackle these difficulties, two new m echanisms are adopted in this paper . First, the inp ut i s redefined to m ake it sm ooth and bound ed to handl e uncertainties at i nput. As a cons equence, th e effect of unmodeled high-frequency gains and t ime delay at the input is alw ays b ounded. And then, to handle estim ate and mismatching problem, the input-redefinition sys tem is transformed to an uncertainty-free system, which is proved to be input-out put equi valent wit h the aid of the additive sta te decomposition 1 [16]. All mismatching uncertainties, mismat ching disturbance and effect of unmodeled dynamics plus time delay are lu mped i nto a new distu rbance at the output. An o bserver is t hen desig ned for the transformed system to estimate th e new state and the ne w disturbance. Next, th e transformed s ystem is ‘addi tiv ely’ decomposed int o two independ ent subsystem s in charge of correspond ing subt asks, namely the tracking (including rejectio n) su btask and t he in put- realization subtask . Then one can design controller for eac h subtask respecti vely , and finall y combines th em to achie ve the original cont rol t ask. Three benchmark examples are give n to demonstrate the ef fectiveness of the proposed control scheme. The additiv e state decompositi on is a decomposition scheme also proposed in our pre v ious work [17], where the additive st ate d ecomposition is used to transform output feedback tracking cont rol for systems with measurable nonlinearities and unkn own disturbances and then to decompose it into three simpler problem s. This hence m akes a challengi ng control problem tractable. In thi s paper , a d iff erent control probl em is in vestigated by using additiv e state decompos ition. Correspondingly , th e transform and decomp osition are different. The major contributions o f this paper are: i) a tracking control scheme propo sed to handle mismatching parametric uncertainty , mis matching additive di sturbances, unm odeled hi gh- frequency gains and time delay at t he input; ii) a model transform proposed to l ump various uncertainties together; iii) additive state decomposition in the controller design, especially in how to handle saturation term. This paper is or ganized as follows. In Section II, the p roblem formulatio n is given and 1 In this paper w e have replaced the term “additiv e decomp osition” in [16] with the more descriptiv e term “additiv e state decomposition” . October 31, 2018 DRAFT 4 the additive st ate decomposit ion is introduced briefly first. In Section III, i nput is redefined and the input-redefinition sys tem is transform ed to an uncertainty-free system in s ense of input-output equiv alence. Sequently , cont roller desig n i s given in Section IV . In Section V , two-cart example i s revisited by the proposed cont rol scheme. Section VI concludes this paper . I I . P RO B L E M F O R M U L A T I O N A N D A D D I T I V E S TA T E D E C O M P O S I T I O N A. Pr oblem F ormul ation Consider a class of SIS O nonl inear systems as foll ows: ˙ x = f ( t, x, θ ) + bu ξ + d, x (0) = x 0 y = c T x. (1) Here b ∈ R n and c ∈ R n are const ant vectors, θ ( t ) ∈ R m belongs to a given compact set Ω ⊆ R m , x ( t ) ∈ R n is the st ate vector , y ( t ) ∈ R is the ou tput, d ( t ) ∈ R n is a bounded disturbance vector , and u ξ ( t ) ∈ R is the control subject to an unm odeled high-frequency gain and a time delay as follows: u ξ ( s ) = H ( s ) e − τ s u ( s ) (2) where H ( s ) is an unkn own stable proper t ransfer function with H ( 0) = 1 representing the unmodeled hi gh-frequency gain at the i nput and τ ∈ R is the input delay . It is assumed that only y is av ailabl e from measurement. The desired trajectory r ( t ) ∈ R is known a priori, t ≥ 0 . In the following, for con venience, we will drop the notation t except when necessary for clarity . For syst em (1), the follo wing assu mptions are made. Assumption 1 . The function f : [0 , ∞ ) × R n × R m → R n satisfies f ( t, 0 , θ ) ≡ 0 , and is bo unded when x is bounded on [0 , ∞ ) . Moreover , for given θ ∈ Ω , there exist p ositive definite matrices P ∈ R n × n and Q ∈ R n × n such that P ∂ x f ( t, x, θ ) + ∂ T x f ( t, x, θ ) P ≤ − Q, ∀ x ∈ R n , (3) where ∂ x f , ∂ f ∂ x ∈ R n × n . Definition 1 [18]. T he L 1 gain of a stable proper SISO s ystem is defined k G ( s ) k L 1 = Z ∞ 0 | g ( t ) | d t, where g ( t ) is th e impulse response of G ( s ) . October 31, 2018 DRAFT 5 Assumption 2 . There exists a kno wn stable proper transfer functi on C ( s ) with C (0) = 1 such t hat k C ( s ) ( H ( s ) − 1) k L 1 ≤ ε H , k sC ( s ) k L 1 ≤ ε τ , where ε H , ε τ ∈ R are positiv e real. Under Assu mptions 1-2 , the objective here i s to design a tracking cont roller u such that y → r wi th a good t racking accurac y , i.e., y − r is ultimately bounded by a small v alue. Remark 1 . From Assumptio n 1 , since f ( t, x, θ ) = ∂ x f ( t, x + µx, θ ) x, µ ∈ (0 , 1) by t he T aylor e xpansion. Consequently , the sys tem ˙ x = f ( t, x, θ ) is exponentially s table by (3). In practice, many system s are stable themselves or they can be stabili zed by output feedback control. The following three benchmark systems all satisfy Assumption 1 . Example 1 ( Roh rs’ Examp le ) . Consider the Rohrs’ e xample system as follo ws [9]: y ( s ) = 2 s + 1 229 s 2 + 30 s + 229 u ( s ) . (4) The nom inal system is assumed to be y ( s ) = 2 s +3 u ( s ) here. In this case, the system (4) can be formulated into (1) as ˙ x = − (3 + θ ) x + 2 u ξ , x (0) = 1 y = x (5) where the parameter θ = − 2 is assumed unknown and H ( s ) = 229 s 2 +30 s +229 , τ = 0 . It is easy to see that Ass umption 1 is satisfied. Choos e C ( s ) = 1 2 s +1 . Then As sumption 2 is satis fied with ε H = 0 . 12 and ε τ = 1 . Example 2 ( Nonli near ) . Consider a simple nonl inear system as follo ws [19 ]: ˙ x = − x − (1 + θ ) x 3 + u ( t − τ ) + d , x (0) = 1 y = x, (6) where x, y , u , d ∈ R , the parameter θ ( t ) = 0 . 2 sin (0 . 1 t + 1) , the input delay τ = 0 . 1 and d ( t ) = 0 . 5 sin (0 . 2 t ) are assumed unkno wn. The syst em (6) can be formulated into (1) with f ( t, x, θ ) = − x − (1 + θ ) x 3 and H ( s ) = 1 , τ = 0 . 1 . It is easy to verify ∂ x f ( t, x, θ ) = − 1 − 3 (1 + θ ) x 2 ≤ − 1 . Therefore, Assumpt ion 1 is satisfied. L et C ( s ) = 1 2 s +1 . T hen Assumption 2 is satisfied w ith ε H = 0 and ε τ = 1 . Remark 2 . The Rohrs’ exa mple system i n Example 1 is proposed to demons trate that con ventional adaptive control algorith ms dev eloped at that time lo se th eir robustness in the presence of unmodeled dynamics [9]. For the tracking problem in Example 2 , there exist robustness issu es by using exact feedback linearization [19]. Compared with the system in [19], the i nput delay is added in (6) to make system worse. The t wo b enchmark examples October 31, 2018 DRAFT 6 tell us that the uncertainties either on the syst em parameters or at the input cannot be ignored in p ractice when design a tracking controller , even if the original system s are stabl e. This is also the initial moti vation of this paper . B. Addit ive State Decompo sition In order to make t he paper self-contained, additive st ate decompo sition [16] is introduced briefly here. Consider the fol lowing ‘original’ system: f ( t, ˙ x, x ) = 0 , x (0) = x 0 (7) where x ∈ R n . W e first bring in a ‘primary’ system ha ving the same dimens ion as (7), according to: f p ( t, ˙ x p , x p ) = 0 , x p (0) = x p, 0 (8) where x p ∈ R n . From the original sy stem (7) and the primary system (8) we derive the following ‘secondary’ system: f ( t, ˙ x, x ) − f p ( t, ˙ x p , x p ) = 0 , x (0) = x 0 (9) where x p ∈ R n is gi ven by the p rimary system (8). Define a new variable x s ∈ R n as follows: x s , x − x p . (10) Then the secondary system (9) can be further writt en as follo ws: f ( t, ˙ x s + ˙ x p , x s + x p ) − f p ( t, ˙ x p , x p ) = 0 , x s (0) = x 0 − x p, 0 . (11) From the definition (10), we h a ve x ( t ) = x p ( t ) + x s ( t ) , t ≥ 0 . (12) Remark 3 . By the additive state decompositi on , the s ystem (7) is decomposed into two subsystems with the same dimension as the original system. In this sense our decompositio n is “additive”. In addition , this decompositio n is wi th respect to state. So, w e call it “additive state decomposition” . As a special case of (7), a class of dif ferential dynamic systems is considered as follows: ˙ x = f ( t, x ) , x (0 ) = x 0 , y = h ( t, x ) (13) October 31, 2018 DRAFT 7 where x ∈ R n and y ∈ R m . T wo systems, denoted by the primary syst em and (deri ved) secondary system respecti vely , are defined as follo ws: ˙ x p = f p ( t, x p ) , x p (0) = x p, 0 y p = h p t, x p (14) and ˙ x s = f ( t, x p + x s ) − f p ( t, x p ) , x s (0) = x 0 − x p, 0 , y s = h ( t, x p + x s ) − h p t, x p (15) where x s , x − x p and y s , y − y p . The secondary system (15) is determined by the original system (13) and the primary s ystem (14). From the definition, we have x ( t ) = x p ( t ) + x s ( t ) , y ( t ) = y p ( t ) + y s ( t ) , t ≥ 0 . (16) I I I . I N P U T R E D E FI N I T I O N A N D M O D E L T R A N SF O R M A T I O N Since H ( s ) is the unm odeled high-frequency gain and τ is the input delay , t he control signal should be smoo th (low-fre quency signal) so that it will maint ain its ori ginal form as far as possible after passing H ( s ) e − τ s . Oth erwise, the control si gnal will be dist orted a lot. This explains why high-gain feedback in p ractice is often a voided. For such a purpose, the input is redefined to make control signal smo oth and bounded fir st. T his makes the effect of H ( s ) e − τ s under control, i.e., the ef fect will be predicted and bounded. A. Input Redefinition Redefine the input as follo ws: u ( s ) = C ( s ) [ σ a ( v ) ( s )] where v ∈ R is the redefined cont rol input and σ a : R → [ − a, a ] is a saturation function defined as σ a ( x ) , sign ( x ) min ( | x | , a ) . Then u ξ is written as u ξ ( s ) = H ( s ) e − τ s C ( s ) [ σ a ( v ) ( s )] = C ( s ) [ σ a ( v ) ( s )] + ξ ( s ) (17) where ξ ( s ) = C ( s ) ( H ( s ) e − τ s − 1) [ σ a ( v ) ( s )] represents the effect of the unmodeled high - frequency gain and the time delay . The function ξ ( s ) can be further written as ξ ( s ) = C ( s ) ( H ( s ) − 1) e − τ s [ σ a ( v ) ( s )] + C ( s ) e − τ s − 1 [ σ a ( v ) ( s )] . (18) October 31, 2018 DRAFT 8 From the d efinition of σ a , we have sup −∞ 0 . Mo reove r , its deriv ativ e is often giv en or can be obtained by analytic methods . Whereas, the new disturbance d new only can be obtained at t he time t whose deri vativ e only can be obtained by n umerical methods. By recalling (27), the ne w dist urbance d new depends on the disturbance d , the p arameters θ and ˆ θ , the ef fect of unmod eled high-frequency g ain namely ξ , the st ate x new , and initial value x 0 . One way of reducing the complexity is to design an observer to estimate θ , and makes ˆ θ → θ as t → ∞ . As a result, the new disturbance d new finally depends on d and ξ as t → ∞ . In practice, lo w fre quency band is o ften dominant i n the reference signal and disturbance. Therefore, from a practical point of vie w , we can also modify the tracking tar get, namely r − d new . For example, let r − d new pass a lo w-pass filt er to obtain its m ajor component. If th e major component of r − d new belongs to a fixed family of functi ons of time, Pr oblem 1 can also be considered as an outpu t regulation problem [21]. 2 B ( δ ) , { x ∈ R | | x | ≤ δ } ; the notation x ( t ) → B ( δ ) means min y ∈B ( δ ) k x ( t ) − y k → 0; B ( δ 1 ) + B ( δ 2 ) , { x + y | x ∈ B ( δ 1 ) , y ∈ B ( δ 2 ) } October 31, 2018 DRAFT 15 C. Pr o blem for Input-Realization Su btask As shown in Fig.1, the input realization subtask aims to make y s → 0 . Let us in vestigate the secondary system (35). By Le mma 1 , we hav e k x s ( t ) k ≤ β ( k x s ( t 0 ) k , t − t 0 ) + γ k b k sup t 0 ≤ s ≤ t k u ( s ) − u p ( s ) k . (41) This implies that y s → γ k b k k c k B ( δ s ) as u → u p + B ( δ s ) , where δ s ∈ R . It is noticed t hat u only can be realized by (21) . Therefore, problem for input-realization subtask can be stated as follows: Pr oblem 2 . Given a s ignal u p , design a cont r oll er v = v s ( t, u p ) for (21) such that u → u p + B ( δ s ) as t → ∞ . This is also a t racking problem but with a saturatio n constraint. Here we give a so lution to the Pr oblem 2 . The m ain difficult is how to handl e the saturati on in (21). Here, additiv e state decomp osition will be used again. T aking (21) as the original sys tem, we cho ose the primary system as follows ˙ z p = A z z p + b z v u z p = c T z z p + d z v (42) Then the secondary system is determined by the original system (21) and t he primary system (42) with the rule (15), and we can obtain that ˙ z s = A z z s + b z ( σ a ( v ) − v ) u z s = c T z z p + d z ( σ a ( v ) − v ) . (43) According to (16), we have z = z p + z s and u = u z p + u z s . T he b enefit broug ht by the additiv e state decompositi on is that the controller saturati on will not af fect the primary system (42). Moreover , the controll er v can be designed only based on the prim ary system (42), where the controller v uses t he state z p not z . So, the strategy here is to design v = v s ( t, u p ) in (42) to driv e u z p → u p as t → ∞ and neglect t he secondary system (43). Since v s ( t, u p ) is bounded, the state of the secondary system (43) will be bounded as well. If σ a ( v s ( t, u p )) − v s ( t, u p ) → 0 as t → ∞ , then u z s → 0 as t → ∞ . Consequentl y , u → u p as t → ∞ . For (42), the transfer function from v to u z p is u z p ( s ) = C ( s ) v ( s ) . If C ( s ) is designed to be minim um phase, an easy w ay is to design v to be v ( s ) = C − 1 ( s ) u p ( s ) . (44) October 31, 2018 DRAFT 16 The design will make the sign al σ a ( v ) clos e to t he idea one, meanwhile maintaining t he signal σ a ( v ) smoo th as fa r as possible. By recalling (18 ), it will make the ef fect of th e unmodeled high-frequency g ain and th e time delay ξ smaller . D. Contr oller Inte gration W ith the solutions of the two probl ems in hand, we can st ate Theor em 4 . Under Assumptions 1-2 , suppose i) Pr oblems 1-2 are solved; ii) the controller for system (1) (or (26)) is desi gned as Observer: ˙ ˆ x new = f ( t, ˆ x new , ˆ θ ) + bu, ˆ x new (0) = 0 , ˙ ˆ x p = f ( t, ˆ x p , ˆ θ ) + bu p , ˆ x p (0) = 0 , ˆ d new = y − c T ˆ x new (45) Controller: u p = u r ( t, ˆ x p , r, ˆ d new ) , v = v s ( t, u p ) ˙ z = A z z + b z σ a ( v ) , u = c T z z + d z σ a ( v ) (46) Then the output of system (1) (or (26)) satisfies that y → r + B ( δ r + γ k b k k c k δ s ) as t → ∞ , meanwhile keeping all states bou nded. In particular , if δ r + δ s = 0 , th en the output in s ystem (1) (or (26)) satisfies t hat y → r as t → ∞ . Pr oof. It is easy to follow the proof in Theor ems 2-3 th at the observer (45) will make ˆ x new ≡ x new , ˆ d new ≡ d new , ˆ x p ≡ x p . (47) Suppose t hat Pr oblem 1 i s s olved. By (40) and (47), the controll er u p = u r ( t, ˆ x p , r, ˆ d new ) can driv e y p → r + B ( δ r ) as t → ∞ in (34). Suppo se that Problem 2 is solved. By (47), t he controller v = v s ( t, u p ) can drive u → u p + B ( δ s ) as t → ∞ in (35). Further by (41), we hav e y s → B ( γ k b k k c k δ s ) . Since y = y p + y s , we ha ve y → r + B ( δ r + γ k b k k c k δ s ) . Example 5 ( Rohrs’ Example, Example 3 Conti nued ) . Acc ording to (34), t he primary system of linear system (32) can be rewritten as follo ws: ˙ x p = − (3 + ˆ θ ) x p + 2 u p y = x p + d new October 31, 2018 DRAFT 17 Design u p = 1 2 [(2 + ˆ θ ) x p + r + ˙ r − d new − ˙ d new ] . Then the system above becomes ˙ e p = − e p , where e p = y p − r . Therefore, y p → r as t → ∞ . According to (44), v i s d esigned as v s ( t, u p ) = 2 ˙ u p + u p . Here ˙ u p and ˙ d new are approx imated by ˙ d new ≈ L − 1 ( s 0 . 1 s +1 d new ( s )) and ˙ u p ≈ L − 1 ( s 0 . 1 s +1 u p ( s )) , respectively . Suppose ˆ θ = 0 and gi ven r = 0 . 5 and r = 0 . 5 sin (0 . 2 t ) , respectiv ely . Driv en by the resulting controller (46), the simul ation result is sho wn in Fig.2. Example 6 ( Nonli near , Example 4 Continued ) . According to (34), the primary sy stem of nonlinear system (33) can be re writt en as follo ws: ˙ x p = − x p − (1 + ˆ θ ) x 3 p + u p , x p (0) = 0 y p = x p + d new . Design u p = (1 + ˆ θ ) x 3 p + ˙ r + r − ˙ d new − d new . T hen the syst em above becomes ˙ e p = − e p , where e p = y p − r. Therefore, y p → r as t → ∞ . According to (44), v s ( t, u p ) i s designed as v s ( t, u p ) = 2 ˙ u p + u p . Here the deriv ative of u p and d new are approximated by ˙ d new ≈ L − 1 ( s 0 . 1 s +1 d new ( s )) and ˙ u p ≈ L − 1 ( s 0 . 1 s +1 u p ( s )) , respectiv ely . Suppose ˆ θ = 0 and giv en r = 0 . 5 and r = 0 . 5 sin (0 . 2 t ) , respectively . Drive n by the resulting controller (46), the simulatio n result is shown in Fig.3. Remark 7 . The deriv ative o f d new and u p can be also obtained by diffe rentiator technique [23],[24]. It is interestin g to note that ˆ θ is dif ferent from θ , but y → r with a goo d tracking accurac y . This is one major advantage of this p roposed control scheme. Moreover , all t he unknown parts such as θ, d and the ef fect of H ( s ) e − sτ are treated as a l umped disturbance d new . This can e xplain why the proposed s cheme can handle many uncertainties. V . T W O - C A RT E X A M P L E The two-cart mass-spring-damper example was o riginally proposed as a benchmark prob- lem for rob ust con trol design [12],[22]. Next, we wil l revisit th e two-cart example by the proposed control scheme. The two-cart sy stem is s hown in Fig.4. Th e stat es x 1 ( t ) and x 2 ( t ) represent the absolute position of the two carts, whose mass es are m 1 and m 2 respectiv ely; k 1 , k 2 are the spring constants, and b 1 , b 2 are the damping coeffi cients; d ( t ) is a dist urbance force acting on the mass m 2 ; u ( t ) is the control force subject to an unmodeled high-frequency gain and a time delay , which acts upon the mass m 1 . The parameter m 1 = 1 is known, whereas the following parameters m 2 = 2 , k 1 = 0 . 8 , k 2 = 0 . 5 , b 1 = 1 . 3 , b 2 = 0 . 9 are assumed unknown. The un- modeled high-frequency gain and a time delay is assumed to b e H ( s ) e − τ s = 229 s 2 +30 s +229 e − 0 . 1 s . October 31, 2018 DRAFT 18 The dis turbance force ζ ( t ) is modeled as a first-order (col ored) stochastic process generated by dri ving a low-pass filter with continuous-ti me white noise ε ( s ) , wi th zero-mean and unit intensity , i.e. Ξ = 1 , as follows ζ ( s ) = 0 . 1 s +0 . 1 ε ( s ) . The ov erall state-space representation i s formulated into (1) as foll ows: ˙ x = A ( θ ) x + bu ξ + d y = c T x (48) where x = x 1 x 2 ˙ x 1 ˙ x 2 , A ( θ ) = 0 0 1 0 0 0 0 1 − k 1 m 1 k 1 m 1 − b 1 m 1 b 1 m 1 k 1 m 2 − k 1 + k 2 m 2 b 2 m 2 − b 1 + b 2 m 2 , d = 0 0 0 1 m 2 ζ , b = 0 0 1 m 1 0 , c = 0 1 0 0 , θ = h m 1 m 2 k 1 k 2 b 1 b 2 i . The obj ectiv e here is to design a tracking controller u such that y → r with a go od tracking accurac y . Since t he dampers will alw ays consum e the energy untile the two carts are at rest, it can be concluded that the two-cart s ystem (a physical system) is stable for any θ in the real world. This implies that, for any giv en θ ∈ Ω , there exist pos itive definite matrices P ∈ R n × n and Q ∈ R n × n such t hat P A ( θ ) + A T ( θ ) P ≤ − Q, ∀ x ∈ R n , where Ω represents the set t hat any θ i n t he real world. Assump tion 1 is sati sfied. Let C ( s ) = 1 2 s +1 . Th en Ass umption 2 is satisfied with ε H = 0 . 12 and ε τ = 1 . According to input redefiniti on above, the t wo-cart system (48) can be re written as follows: ˙ x = A ( θ ) x + bu + ( d + ξ ) y = c T x where sup t ≥ 0 | ξ ( t ) | ≤ 0 . 17 a and u i s generated by ˙ z = − 0 . 5 z + 0 . 5 σ a ( v ) , u = z . October 31, 2018 DRAFT 19 Then, according to (26), t he uncertainty-free transformed system of (48) is ˙ x new = A ( ˆ θ ) x new + bu, x new (0) = 0 y = c T x new + d new . (49) where d new = c T e A ( θ ) t x 0 + Z t 0 c T e A ( θ )( t − s ) b [ d ( s ) + ξ ( s ) + A ( θ ) x new ( s ) − A ( ˆ θ ) x new ( s )] ds. According to (34), the primary sys tem of (49) can be rewritten as follo ws: ˙ x p = A ( ˆ θ ) x p + bu p , x p (0) = 0 y p = c T x p + d new . (50) The transfer funct ion from u p to y p in (50) is G y u ( s ) , which is a m inimum phase. Thus , u p can be designed as u p ( s ) = G − 1 y u ( s ) ( r − d new ) ( s ) , which can drive y p → r . The P r oblem 1 is sloved. Furthermore, according to (44), redefined input v is d esigned as v s ( t, u p ) = L − 1 C − 1 ( s ) G − 1 y u ( s ) ( r − d new ) ( s ) . T o realize t he control, v s ( t, u p ) is approxi mated to be v s ( t, u p ) = L − 1 Q ( s ) C − 1 ( s ) G − 1 y u ( s ) ( r − d new ) ( s ) . (51) where Q ( s ) is a fifth-order low-pass filter to make the compensator physically realizable (the order of denom inator is greater than or equ al to that of numerator). For simplicity , Q ( s ) is chosen to be Q ( s ) = 1 Q k =5 k =1 ( 1 10 k s +1 ) here. The Pr oblem 2 is sl oved. Therefore, according to (45)-(46), the controller for the two-cart system is designed as follows: ˙ ˆ x new = A ( ˆ θ ) ˆ x new + bu, ˆ x new (0) = 0 , ˆ d new = y − c T ˆ x new ˙ z = − 0 . 5 z + 0 . 5 σ a ( v s ( t, u p )) , u = z (52) where v s ( t, u p ) is give n by (51) and a is chosen to be 1 here. T o shown the effecti veness, the proposed controller (52) i s applied to three cases: Case 1: ˆ θ = θ Case 2: ˆ θ = [ 1 1 1 0 . 9 1 . 5 1 ] T Case 3: θ = ˆ θ = [ 1 1 1 0 . 9 1 . 5 1 ] T . Case 1 im plies the parameters are k nown e xactly . Case 2 impl ies the parameters are unknown. While, Case 3 implies the parameters are changed to be a specified on e. The s imulation s are shown in Figs. 5-7. The proposed controller achieves a good tracking accuracy . Moreo ver , it is seen t hat the response in Cases 2-3 is faster than that in Case 1. And, the tracking accurac y in Cases 1,3 is better than that in Case 2. So, Case 2 is a tradeoff between Case 1 and Case 3. October 31, 2018 DRAFT 20 Remark 8 . The simulati ons sho w that the proposed controller can handle the case that t he estimate parameters are di f ferent from t he true parameters. M oreove r , the response is similar to that of the model with the estim ate parameters. Th is implies th at t he p roposed controller i n fact achieve s th e results similar to model reference adaptiv e control. Howev er , unl ike model reference adapti ve control, u nknown parameters are not estimated and changed directly . Remark 9 . If the considered syst em is parameterized but there e xist m any uncertain parameters, then an adapti ve control often n eeds corresponding number of estimators, i .e., corresponding number o f i ntegrators. This will cause p arameters conv er ging to true values with very slo w rate or cannot con ver ge to true v alues if without persistent e xcitation. Whereas, in the proposed control, fiv e uncertain parameters and di sturbance are lumped into the disturbance d new , which can be est imated directly . V I . C O N C L U S I O N S Output tracking control for a class of uncertain system s s ubject to unmodeled dy namics and time delay at i nput i s considered. Our m ain contrib ution lies on the p resentation of a new decompositio n scheme, named additive state decompos ition, which no t only transforms the uncertain system t o be an uncertaint y-free system but also simplifies t he controller de sign. The proposed control scheme is with the following t wo salient features. (i) Th e proposed control scheme can handle mismatching uncertaint ies and mismatching disturbance. Moreov er , it can achiev e a good tracking performance without exact parameters. (ii) The p roposed control scheme has considered many uncertaint ies. In the presence of these un certainties, the closed- loop s ystem i s sti ll stable when incorporating the prop osed control ler . Three benchmark examples are given to show the effecti veness of the proposed con trol scheme. R E F E R E N C E S [1] Nunes, E.V .L., L iu H., Lizarralde, F . Global exact tracking for uncertain systems using output-feedback sliding mode control. IE EE Tra nsactions on Automatic Control, V ol. 54, No. 4, April 2009. 1141-1147. [2] Stepanyan, V ., Kurdila, A. Asymptotic tracking of uncertain systems wit h continuous control using adaptiv e bounding . IEEE Transa ctions on Neural Networks, V ol. 20, No. 8, August 2009. 1320-132 9. [3] Ferreira, A., Bejarano, F .J., Fridman, L.M. Robu st con trol with exact uncertainties compensation: with or without chattering? IEEE T ransactions on Control Systems T echnology , V ol. 19, No. 5, March 2003. 969 -975. [4] Corradini, M.L., Orlando, G. Robust practical stabilization of nonlinear uncertain plants with input and output nonsmooth nonlinearities. IEE E T ransactions on Control Systems T echnology , V ol. 11, No. 2, March 2003. 196-2 03. [5] Chaturvedi, N. A., Sanya l, A.K., C hellappa, M., V alk, J.L., McClamroch , N.H., Bernstein, D.S. Adaptiv e tracking of angular velo city for a planar rigid body with unkno wn models for inertia and input nonlinearity . IEEE Transaction s on Control Systems T echnology , V ol. 14, No. 4, July 2006. 613-627 . October 31, 2018 DRAFT 21 [6] Smith, R.E., Sarrafian, S.K. Effect of time delay on flying qualities: an update. N ASA T echnical Memorand um No. 88264, 1986. [7] Piergiov anni, M., Liviu, L., W alter, A.S . Time delay effects on linear/nonlinear feedback control of simple aeroelastic systems. Journal of Guidance, Control, and Dynamics, V ol. 28, 2005. 53-62. [8] Johnson, E.N., Davidson, J.B., Murphy P . C. Predicting the effects of unmodeled dynamics on an aircraft flight control system design using ei genspace assignment. T echnical Memoran dum 4548, NASA, June 1994 . [9] Rohrs, C., V alav ani, L., At hans, M., S tein, G. Robustness of continuous-time adaptiv e control algorithms in the presence of unmodeled dynamics. IE EE Transa ction on Automatic Control, V ol. 30, No. 9, September 1985. 881-889. [10] Quan, Q., Cai, K.-Y . A filtered repetitive controller for a class of nonlinear systems [J]. IEEE Transaction on Automatic Control, V ol. 56, No. 2, 2011. 399-405. [11] Bresch-Pietri, D., Krstic, M. Adapti ve trajectory tracking despite unkno wn input delay and plan t parameters. Automatica, V ol. 45, No. 9, September , 200 9. 2074-208 1. [12] Xargay , E., Hov akimyan, N., Cao C. Benchmark problems of adapti ve con trol r e visited by L 1 adapti ve control. 17th Mediterranean Conference on Control & Automation , Make donia Palace, Thessaloniki, Greece, June 24-26, 2009. 31-36. [13] Cao, C., Hov akimyan, N. Stability margins of L 1 adapti ve control architecture. IEEE Transaction on Automatic Control, V ol. 55, No.2, 2010. 480-48 7. [14] Francis, B. A., W onham, W .M. The internal model principle of control theory . Automatica, V ol. 12, No. 9, S eptember 1976. 457-465. [15] T rinh, H., Aldeen, M. O utput tracking for linear uncertain time-delay systems. IEE P roceedings on Control Theory and Applications, V ol. 143, No. 6, Nov ember 1996. 481-4 88. [16] Quan, Q., Cai, K.-Y . Additiv e decom position and its applications t o internal-model-based tracking. Joint 48th IEEE Conference on Decision and Control and 28th Chinese Control C onference, S hanghai, China, 2009. 817 -822. [17] Quan, Q., Cai, K. -Y ., and Lin, H. Additi ve-decomp osition-based output feedbac k tracking control for systems with measurable nonlinearities and unkno wn disturbances. arXiv . [Online]. A vailable: http://arxiv . org/abs/1 109.4516. [18] Cao, C., Hov akimyan, N. Design and analysis of a novel L 1 adapti ve control architecture wit h guaran teed transient performance. IE EE Tran saction on Automatic Control, V ol. 53, No.2, 2008. 586-591. [19] Hagenmey er . V , Delaleau, E. Exact feedforw ard linearization based on differential flatness. International Journal of Control, V ol. 76, No. 6, 2003. 537-556. [20] Khalil, H. K. Nonlinear systems . Upper Saddle River , NJ : P rentice-Hall, 2002. [21] Isidori, A., Marconi, L ., Serrani, A. Robust Auton omous Guidance: An Internal Mod el-Based A ppr oach . Springer- V erlag: London , 2003. [22] Fekri, S. , Athans, M., and Pascoal, A. Issues, progress and new results in robust adapti ve control. International Journal of Adaptive C ontrol and Si gnal Processing, V ol. 20, No. 10, 2006. 519-579. [23] Han, J., W ang, W . Nonlinear tracking differen tiator . Journ al of S ystems Science and Mathematical Sciences, V ol. 14, No. 2, February 1994. 177-183. [24] Lev ent, A. Robust exact differen tiation via sl iding mode t echnique. Automatica, V ol. 34, No. 3, March 1998. 379-384. October 31, 2018 DRAFT 22 0 5 10 15 20 25 30 35 40 45 50 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 0 5 10 15 20 25 30 35 40 45 50 −0.5 0 0.5 1 time(sec) y r y r Fig. 2. Output of the Rohrs’ example system 0 5 10 15 20 25 30 35 40 45 50 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 0 5 10 15 20 25 30 35 40 45 50 −1 −0.5 0 0.5 1 time(sec) y r y r Fig. 3. Output of the nonlinear system October 31, 2018 DRAFT 23 1 m 2 m 1 k 1 b 2 k 2 b 2 x 1 x ! " s H s e # $ Disturbance Control u Fig. 4. The two-cart system 0 5 10 15 20 25 30 35 40 45 50 −0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0 5 10 15 20 25 30 35 40 45 50 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 time(sec) y r y r Fig. 5. Output of the two-cart system i n Case 1 October 31, 2018 DRAFT 24 0 5 10 15 20 25 30 35 40 45 50 −0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0 5 10 15 20 25 30 35 40 45 50 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 time(sec) y r y r Fig. 6. Output of the two-cart system i n Case 2 0 5 10 15 20 25 30 35 40 45 50 −0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0 5 10 15 20 25 30 35 40 45 50 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 time(sec) y r y r Fig. 7. Output of the two-cart system i n Case 3 October 31, 2018 DRAFT
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment