p‑지배 시스템의 차동 L₂,p 이득을 나타내는 H∞,p 노름
본 논문은 선형 시불변(p‑dominant) 시스템의 차동 L₂,p 이득이 전통적인 H∞ 노름을 수직 스트립 영역으로 일반화한 H∞,p 노름과 동일함을 증명한다. Hardy 공간 이론을 이용해 H∞,p 노름을 연산자(곱·컨볼루션) 노름으로 해석하고, 이를 기반으로 작은 이득 정리와 LMI 기반 계산 방법을 제시한다. 결과적으로 p‑dominance 분석을 기존의 H∞ 안정성 기법과 동일한 도구로 수행할 수 있다.
저자: Alberto Padoan, Fulvio Forni, Rodolphe Sepulchre
본 논문은 “p‑dominant” 시스템이라는 새로운 시스템 분류를 기존 H∞ 이론과 연결함으로써, 차동 L₂,p 이득을 효율적으로 분석·설계할 수 있는 수학적 기반을 마련한다.
1. **배경 및 동기**
p‑dominance는 시스템의 장기 거동이 p 차원으로 제한된다는 개념으로, p=0이면 전역적인 안정성, p=1이면 다중 평형점, p=2이면 Poincaré‑Bendixson 정리와 같은 제한된 비정상 궤적을 의미한다. 기존의 p‑dissipativity 이론은 라플라스 변환을 이용해 quadratic storage 함수를 inertia(p,0,n−p)를 갖는 P 행렬로 일반화했으며, 이는 KYP 부등식 형태로 표현된다.
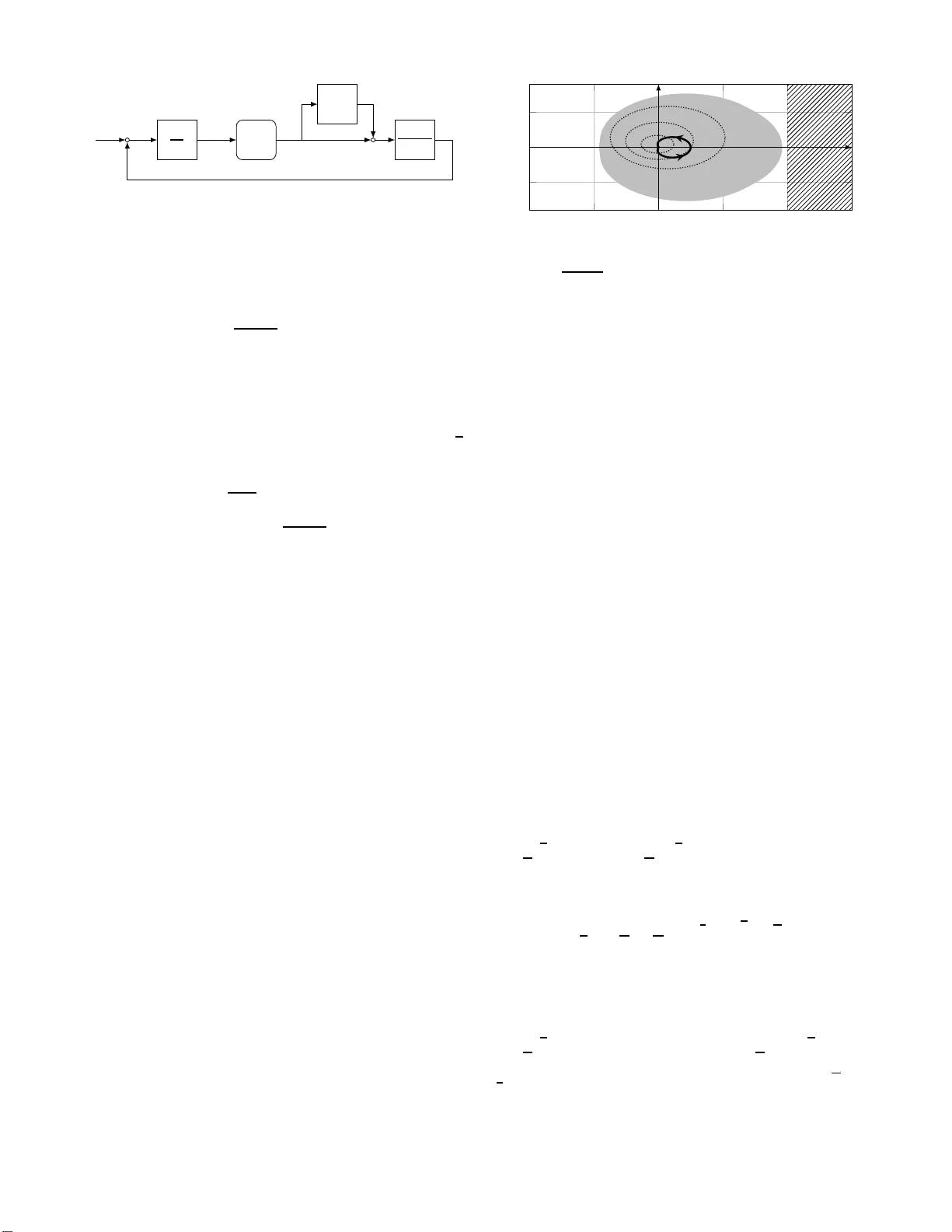
2. **Hardy 공간과 H∞,p 노름 정의**
복소평면의 수직 스트립 SΛ(Λ=(λ₁,λ₂)) 위에 정의된 Hardy 공간 Hq(SΛ)를 소개한다. H∞(SΛ) 함수는 스트립 내부에서 전역 유계이며, 경계 ∂SΛ에서의 최대 절대값이 전체 노름과 동일하다(정리 2). 이때 H∞(SΛ) 노름은 두 개의 L∞(Lλ₁), L∞(Lλ₂) 노름 중 큰 값으로 계산된다(정리 3).
3. **연산자 해석**
- **곱 연산자 MG**: G∈H∞(SΛ)와 입력 u∈H₂(SΛ) 사이의 곱 연산자를 정의하고, 그 연산자 노름이 H∞(SΛ) 노름과 동일함을 증명한다(정리 4).
- **컨볼루션 연산자 Ĝ**: 선형 시불변 시스템 (17)의 임펄스 응답 g(t)를 이용해 L₂(RΛ)→L₂(RΛ) 컨볼루션 연산자를 정의하고, 이 연산자 노름 역시 H∞(SΛ) 노름과 일치함을 보인다(정리 5).
4. **p‑dominant 시스템과 차동 L₂,p 이득**
시스템 (24)의 선형화와 차동 변수(δx,δu,δy)를 도입하고, P가 inertia(p,0,n−p)를 갖는 대칭 행렬일 때 식 (26)의 부등식이 성립하면 시스템은 λ‑rate를 갖는 p‑dominant임을 정의한다. 이때 전송함수 G(s)의 극 배치는 p개의 극이 스트립 오른쪽, n−p개의 극이 왼쪽에 위치한다는 것이 핵심이다.
5. **H∞,p 노름과 차동 L₂,p 이득의 등가성**
정리 8은 L₂,p(RΛ) 이득 γΛ와 H∞,p(SΛ) 노름이 정확히 동일함을 증명한다. 즉, γΛ = ‖G‖_{H∞,p(SΛ)}. 이는 차동 이득을 주파수 영역에서 직접 계산할 수 있음을 의미한다.
6. **계산 방법**
- λ‑시프트된 전송함수 Gλ(s)=G(s−λ)와 G_{λ₂}(s)=G(s−λ₂)를 각각 H∞(iℝ) 노름으로 계산하고, 두 값 중 큰 값을 취한다.
- LMI (27) 또는 Hamiltonian 행렬 (31)의 고유값 검사를 이용한 bisection 알고리즘을 적용해 원하는 γ를 찾는다.
- 이러한 절차는 기존 H∞ 최적화 툴(예: MATLAB Robust Control Toolbox)과 동일한 복잡도로 수행 가능하다.
7. **작은 이득 정리의 확장**
두 시스템 Σ₁, Σ₂가 각각 L₂,p₁, L₂,p₂ 이득 γ₁, γ₂를 갖고 γ₁γ₂<1이면, 부정 피드백 연결 시스템은 (p₁+p₂)‑dominant가 된다(정리 7). 이는 기존 H∞ 작은 이득 정리와 구조적으로 동일하지만, 시스템 차원(p)의 합으로 새로운 안정성/지배성을 보장한다.
8. **예시 및 적용**
논문 마지막 섹션에서는 간단한 2차 시스템을 예시로 들어, H∞,p 노름을 계산하고 작은 이득 조건을 검증함으로써 로버스트 p‑dominance를 확인한다. 이 예시는 불확실성이나 비선형성(예: 바운드된 이득 비선형성)과의 피드백 연결에서도 동일한 절차가 적용될 수 있음을 보여준다.
9. **결론 및 향후 연구**
H∞,p 노름을 차동 L₂,p 이득과 동일시함으로써, p‑dominance 분석을 기존 H∞ 안정성 도구와 완전히 일치시켰다. 향후 연구에서는 비선형 시스템에 대한 전역적인 p‑dominance 보증, 데이터 기반 모델링과의 통합, 그리고 대규모 네트워크 시스템에 대한 분산형 H∞,p 설계가 제안된다.
전체적으로 이 논문은 p‑dominant 시스템을 기존 H∞ 이론의 자연스러운 확장으로 재구성하고, 차동 이득을 주파수 영역에서 직접 다룰 수 있는 강력한 프레임워크를 제공한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기