연속시간 비선형 시스템을 위한 근사 심볼릭 모델 및 상태공간 추상화 기법
본 논문은 시간 샘플링 없이 상태공간만을 추상화하여 연속시간 비선형 시스템을 근사 시뮬레이션하는 방법을 제시한다. 제어 인터페이스를 도입하고, 새로운 안정성 개념인 집합에 대한 전역 점근/실용 안정성(C‑Ω‑GAS/GPS)을 정의한다. 이 조건을 만족하면 구체 시스템이 추상 시스템에 의해 ε‑근사 시뮬레이션될 수 있음을 증명하고, 이를 증명하기 위한 라미아니안 기반 설계와 LMI 예시를 제공한다.
저자: Pian Yu, Dimos V. Dimarogonas
본 논문은 연속시간 비선형 시스템에 대한 심볼릭(이산) 모델링 방법을 새롭게 제시한다. 기존 연구들은 상태와 시간을 동시에 샘플링하여 이산 추상화를 수행했으며, 이는 연속시간 시스템의 안전성을 보장하기에 한계가 있었다. 저자는 이러한 한계를 극복하기 위해 시간 샘플링을 배제하고, 오직 상태공간만을 격자화하는 방법을 채택한다. 구체 시스템 Σ는 연속시간 미분 방정식 ẋ₁=f(x₁,u), y₁=h(x₁) 로 정의되고, 추상 시스템 Σ₀는 격자화 연산 Q_η를 통해 상태를 근사화한다.
핵심 아이디어는 구체 시스템과 추상 시스템 사이에 제어 인터페이스 u_v를 도입하는 것이다. 이 인터페이스는 추상 입력 v, 현재 구체 상태 x₁, 추상 상태 x₂를 입력으로 받아 구체 입력 u를 생성한다. 이를 통해 두 시스템을 하나의 증강 시스템 ˆΣ로 결합하고, 증강 시스템의 안정성을 분석한다.
새롭게 정의된 안정성 개념은 ‘집합 Ω에 대한 전역 점근 안정성(C‑Ω‑GAS)’과 ‘전역 실용 안정성(C‑Ω‑GPS)’이다. Ω는 대각선 집합 {(x,x)}으로, 두 시스템 상태가 일치하는 지점을 의미한다. C‑Ω‑GAS는 KL 함수 β를 이용해 시간 t에 따라 d(ˆξ(t),Ω)≤β(d(ˆξ₀,Ω),t) 가 성립함을 요구한다. C‑Ω‑GPS는 여기에 유한한 바운드 ω를 추가하여 d(ˆξ(t),Ω)≤β(d(ˆξ₀,Ω),t)+‖ω‖_∞ 를 만족한다. 이러한 정의는 증강 시스템이 구체와 추상 상태를 점차적으로 일치시키는지를 정량적으로 평가한다.
안정성을 검증하기 위해 Lyapunov 함수 V(x₁,x₂)와 관련된 조건을 제시한다. V는 K_∞ 함수 α, ᾱ 로 양쪽을 제한하고, 미분식 ∂V/∂x·f(x,u_v)+∂V/∂x₀·f(x₀,v) ≤ 0 (또는 ≤ -γV+σ) 를 만족해야 한다. 이러한 조건을 만족하는 V와 admissible 인터페이스 u_v가 존재하면, 증강 시스템은 C‑Ω‑GAS 혹은 C‑Ω‑GPS를 만족한다.
안정성이 확보되면, 출력 함수 h가 전역 Lipschitz 연속(상수 ρ)일 경우, α⁻¹(ᾱ(η))+η<ερ 조건을 통해 구체 시스템 Σ가 추상 시스템 Σ₀에 의해 ε‑근사 시뮬레이션됨을 정리 2가 보인다. 즉, 모든 추상 입력 v에 대해 대응하는 구체 입력 u가 존재하고, 두 시스템의 출력 궤적이 ε 이내로 근접한다는 의미이다.
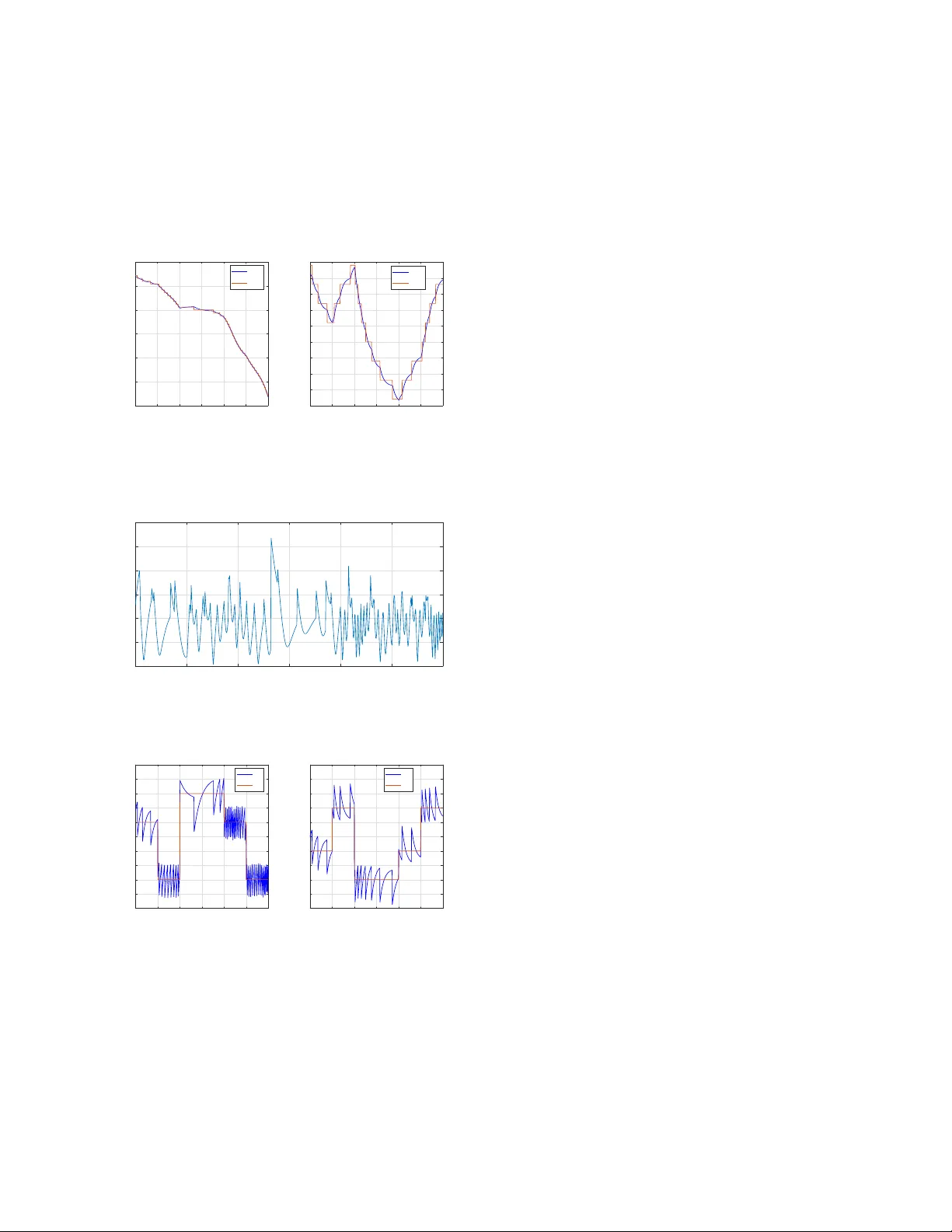
논문은 이론적 결과를 구체적인 예시로 뒷받침한다. 선형 행렬 부등식(LMI) 기반 설계 절차를 제시하여, 시스템 ẋ=Ax+m sin(x)+u 에 대해 P,R,α를 LMI(9)로 구하고, 인터페이스 u_v=v+P⁻¹R(x₁−x₂) 를 정의한다. 이를 통해 C‑Ω‑GPS가 성립함을 확인하고, β와 상수 C를 명시적으로 계산한다.
본 연구의 주요 기여는 다음과 같다. 첫째, 증분 안정성을 요구하지 않아 비선형 시스템에 폭넓게 적용 가능하다. 둘째, 시간 샘플링을 배제함으로써 연속시간 안전 검증에 필요한 궤적 근접성을 보장한다. 셋째, 제어 인터페이스 설계와 Lyapunov 기반 안정성 검증을 명확히 연결하여 실질적인 설계 절차를 제공한다. 이러한 장점은 복잡한 사양(예: 안전, 리치먼트) 하에서 연속시간 시스템에 대한 자동 제어 합성에 유용하게 활용될 수 있다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기