Approximately symbolic models for a class of continuous-time nonlinear systems
Discrete abstractions have become a standard approach to assist control synthesis under complex specifications. Most techniques for the construction of discrete abstractions are based on sampling of both the state and time spaces, which may not be ab…
Authors: Pian Yu, Dimos V. Dimarogonas
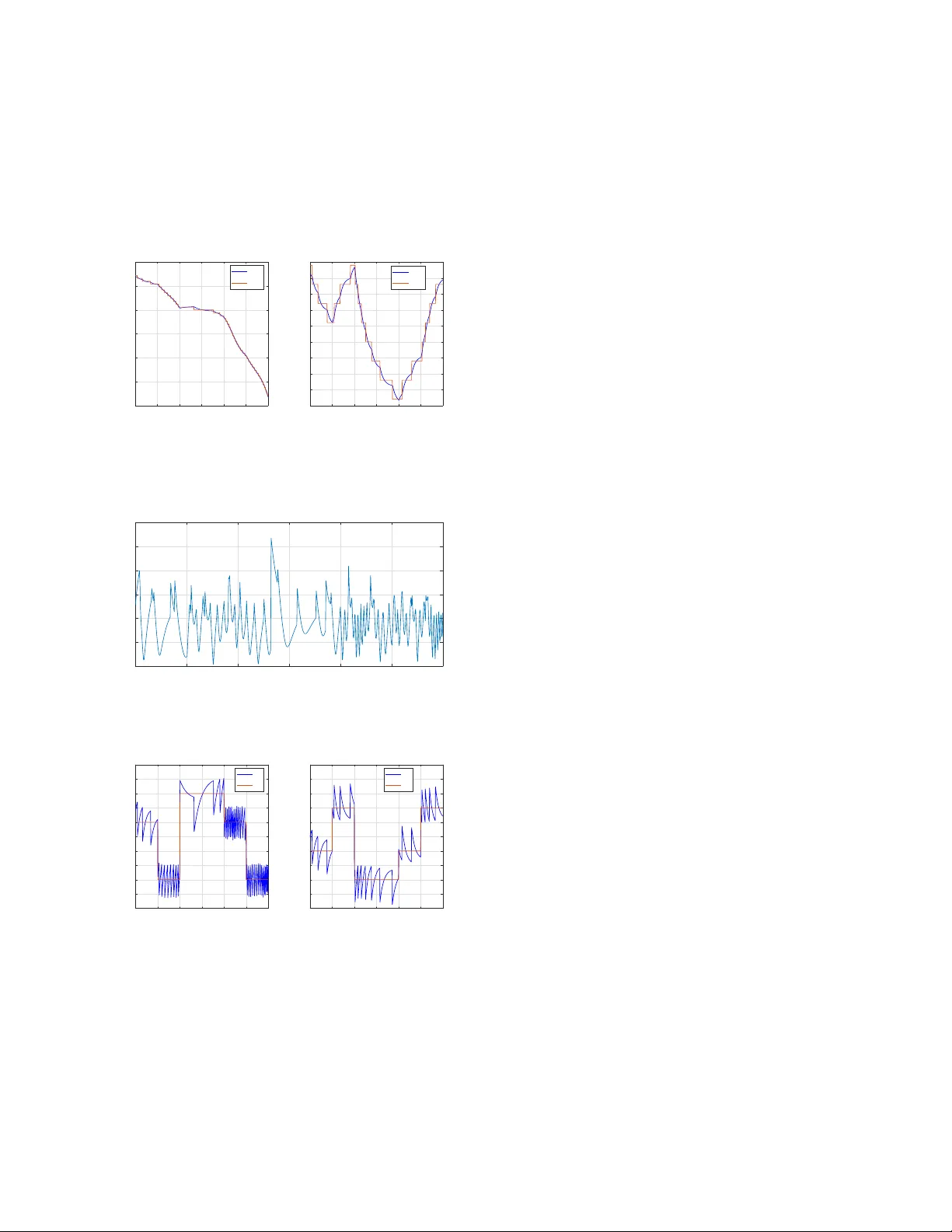
A ppr oximately symbolic models f or a class of continuous-time nonlinear systems Pian Y u and Dimos V . Dimarogonas Abstract — Discrete abstractions have become a standard ap- proach to assist control synthesis under complex specifications. Most techniques f or the construction of discr ete abstractions are based on sampling of both the state and time spaces, which may not be able to guarantee safety for continuous-time systems. In this work, we aim at addressing this problem by considering only state-space abstraction. Firstly , we connect the continuous- time concrete system with its discrete (state-space) abstraction with a control interface. Then, a novel stability notion called controlled globally asymptotic/practical stability with respect to a set is proposed. It is shown that every system, under the condition that there exists an admissible control interface such that the augmented system (composed of the concrete system and its abstraction) can be made controlled globally practically stable with respect to the given set, is approximately simulated by its discrete abstraction. The effecti veness of the proposed results is illustrated by a simulation example. I . I N T RO D U C T I O N In recent years, discrete abstractions have become one of the standard approaches for control synthesis in the context of complex dynamical systems and specifications [1]. It allows one to le verage computational tools dev eloped for discrete-ev ent systems [3]–[5] and games on automata [6], [7] to assist control synthesis for specifications difficult to enforce with con ventional control design methods. Moreover , if the behaviors of the original (continuous) system (referred to as the concrete system) and the abstract system (with discrete state-space) can be formally related by an inclusion or equiv alence relation, the synthesized controller is known to be correct by design [2]. For a long time, bisimulation relations was a central notion to deal with complexity reduction [8], [9]. It was later pointed out that requiring strict equality of observed behaviors is often too strong [10]. T o this end, a new notion called approximate bisimulation was introduced in [11]. Based on the notion of incrementally (input-to-state) stability [12], approximately bisimilar symbolic models were built and extended to various systems [13], [14]. Howe ver , incremental (input-to-state) stability is a stronger property than (input-to-state) stability for dynamical control systems, which makes its applicability still restricti ve. In [24], the authors relax this requirement by only assuming Lipschitz continuous and incremental forward completeness, and an approximately alternating simulation relation is established This work was supported in part by the Swedish Research Council (VR), the European Research Council (ERC), the Swedish Foundation for Strategic Research (SSF) and the Knut and Alice W allenber g Foundation (KA W). The authors are with School of Electrical Engineering and Computer Science, KTH Royal Institute of T echnology , 10044 Stockholm, Sweden. piany@kth.se, dimos@kth.se by over -approximating the behavior of the concrete system. Howe ver , as recently pointed out in [25], this approach may result in a refinement complexity issue. This paper inv estigates the construction of symbolic mod- els for continuous-time nonlinear systems based on the notion of approximate simulation. It improves upon most of the existing results in two aspects: 1) by being applicable to nonlinear systems that are not incrementally stable and 2) by not requiring time-space abstraction. In the first aspect, we propose novel stability notions, called controlled globally asymptotic/practical stability with respect to a gi ven set Ω (C- Ω -GA/PS). These are properties defined on both the concrete system and the abstract system via an admissible control interface. It is shown that for (concrete) systems which are not incrementally stable, the C- Ω -GA/PS prop- erties can still be satisfied. In the second aspect, we show that the abstract system can be constructed such that the con- crete system is ε -approximately simulated by the abstraction without time-space discretization. This point is crucial for safety-critical applications, in which it is necessary that the trajectories of the concrete system and the abstract system are close enough at all time instants. In particular , the application to a class of incremental quadratic nonlinear systems is in vestigated. The introduction of the control interface is inspired by the hierarchical control framework [19]–[22], in which an interface is b uilt between a high dimensional concrete system and a simplified low dimensional abstraction of it. In this paper , we propose to build a control interface between the continuous concrete system and its discrete (state-space) abstraction. Moreov er , the consideration of bounded input set (the input set considered in [19]–[22] is unbounded) brings additional dif ficulty to constructing the interface. Therefore, the results in this paper are essentially nov el and improv ed with respect to the existing work. The remainder of this paper is organized as follows. In Section II, notation and preliminaries are provided. New sta- bility notions are defined in Section III and the main results are presented in Section IV . In Section V , an application to incremental quadratic nonlinear systems is provided. An illustrativ e example is given in Section VI and Section VII concludes the paper . I I . P R E L I M I NA R I E S A. Notation Let R := ( −∞ , ∞ ) , R ≥ 0 := [0 , ∞ ) , R > 0 := (0 , ∞ ) , Z > 0 := { 1 , 2 , . . . } and Z ≥ 0 := { 0 , 1 , 2 , . . . } . Denote R n as the n dimensional real vector space, R n × m as the n × m real matrix space. I n is the identity matrix of order n and 1 n is the column vector of order n with all entries equal to one. When there is no ambiguity , we use 0 to represent a matrix with proper dimensions and all its elements equal to 0 . [ a, b ] and [ a, b [ denote closed and right half-open intervals with end points a and b . For x 1 ∈ R n 1 , . . . , x m ∈ R n m , the notation ( x 1 , x 2 , . . . , x m ) ∈ R n 1 + n 2 + ··· + n m stands for [ x T 1 , x T 2 , . . . , x T m ] T . Let | λ | be the absolute value of a real number λ , and k x k and k A k be the Euclidean norm of vector x and matrix A , respectiv ely . Giv en a function f : R ≥ 0 → R n , the supremum of f is denoted by k f k ∞ , which is giv en by k f k ∞ := sup {k f ( t ) k , t ≥ 0 } and k f k [0 ,τ ) := sup {k f ( t ) k , t ∈ [0 , τ ) } . A function f is called bounded if k f k ∞ < ∞ . Giv en a set S , the boundary of S is denoted by F r ( S ) . Given two sets S 1 , S 2 , the notation S 1 \ S 2 := { x | x ∈ S 1 ∧ x / ∈ S 2 } stands for the set difference, where ∧ represents the logic operator AND. A continuous function γ : R ≥ 0 → R ≥ 0 is said to belong to class K if it is strictly increasing and γ (0) = 0 ; γ is said to belong to class K ∞ if γ ∈ K and γ ( r ) → ∞ as r → ∞ . A continuous function β : R ≥ 0 × R ≥ 0 → R ≥ 0 is said to belong to class KL if for each fixed s , the map β ( r , s ) belongs to class K ∞ with respect to r and, for each fixed r , the map β ( r, s ) is decreasing with respect to s and β ( r , s ) → 0 as s → ∞ . For a set A ⊆ R n and any x ∈ R n , we denote by , d(x , A ) , the point-to-set distance, defined as d(x , A ) = inf y ∈A {k x − y k} . B. System pr operties Consider a dynamical system of the form Σ : ( ˙ x 1 ( t ) = f ( x 1 ( t ) , u ( t )) y 1 ( t ) = h ( x 1 ( t )) , (1) where x 1 ( t ) ∈ R n , y 1 ( t ) ∈ R l , u ( t ) ∈ U ⊆ R m are the state, output and control input of the system, respectiv ely . W e assume that f : R n × U → R n is a continuous map and the vector field f is such that for any input in U , any initial condition in R n , this differential equation has a unique solution. Throughout the paper , we will refer to Σ as the concrete system. Let U τ = { u : [0 , τ [ → U } be a set of continuous functions of time from intervals of the form [0 , τ [ to U with τ > 0 , then we define U = ∪ τ > 0 U τ . In addition, we use dom ( u ) to represent the domain of function u . A curve ξ : [0 , τ [ → R n is said to be a trajectory of Σ if there exists input u ∈ U τ satisfying ˙ ξ ( t ) = f ( ξ ( t ) , u ( t )) for almost all t ∈ [0 , τ [ . A curve ζ : [0 , τ [ → R l is said to be an output trajectory of Σ if ζ ( t ) = h ( ξ ( t )) for almost all t ∈ [0 , τ [ , where ξ is a trajectory of Σ . W e use ξ ( ξ 0 , u, t ) to denote the trajectory point reached at time t under the input signal u ∈ U t from initial condition ξ 0 . Definition 1: [15] A system is called forward complete (FC) if for e very initial condition x 0 ∈ R n and every input signal u ∈ U , the solution is defined for all t ≥ 0 . Definition 2 (Definition 4.13 [18]): Gi ven ε > 0 , two output trajectories ζ 1 : [0 , τ [ → R l and ζ 2 : [0 , τ [ → R l are ε -close if k ζ 1 ( t ) − ζ 2 ( t ) k ≤ ε, ∀ t ∈ [0 , τ [ . I I I . C O N T RO L L E D G L O BA L LY A S Y M P T OT I C O R P R AC T I C A L S T A B I L I T Y W I T H R E S P E C T T O A S E T In this paper , the abstraction technique de veloped in [13] is applied, where the state-space is approximated by the lattice [ R n ] η = n q ∈ R n | q i = k i 2 η √ n , k i ∈ Z , i = 1 , . . . , n o , (2) where η ∈ R ≥ 0 is a state-space discretization parameter . Define the associated quantizer Q η : R n → [ R n ] η as Q η ( x ) = q if and only if | x i − q i | ≤ η / √ n, ∀ i = 1 , . . . n . Then, one has k x − Q η ( x ) k ≤ η , ∀ x ∈ R n . The abstract system is obtained by applying the state abstraction (2), which is giv en by Σ 0 : ( x 2 ( t ) = Q η ( ξ ( Q η ( x 1 (0)) , v , t )) y 2 ( t ) = h ( x 2 ( t )) , (3) where x 2 ( t ) ∈ [ R n ] η . In addition, v ( t ) ∈ U 0 is the control input for the abstract system. W e note that the set U 0 is a design parameter, which will be specified later . Let U 0 = ∪ τ > 0 U 0 τ , where U 0 τ = { u : [0 , τ [ → U 0 } . The trajectory and output trajectory of Σ 0 are denoted by ξ 0 and ζ 0 , respectively . The input u ( t ) of the concrete system (1) will be synthe- sized hierarchically via the abstract system (3) with a control interface u v : U 0 × R n × [ R n ] η → U , which is giv en by u ( t ) = u v ( v ( t ) , x 1 ( t ) , x 2 ( t )) . Then, the augmented control system ˆ Σ is defined as ˆ Σ : ˙ x 1 ( t ) = f ( x 1 ( t ) , u v ( v ( t ) , x 1 ( t ) , x 2 ( t ))) x 2 ( t ) = Q η ( ξ ( Q η ( x 1 (0)) , v , t )) y 1 ( t ) = h ( x 1 ( t )) y 2 ( t ) = h ( x 2 ( t )) (4) and we denote x ( t ) = ( x 1 ( t ) , x 2 ( t )) ∈ ˆ X := { ( z , z 0 ) : z ∈ R n , z 0 ∈ [ R n ] η } , y ( t ) = ( y 1 ( t ) , y 2 ( t )) ∈ ˆ Y := { ( z , z 0 ) : z ∈ R l , z 0 ∈ R l } and ˆ u ( t ) = ( u v ( t ) , v ( t )) ∈ ˆ U := { ( z , z 0 ) : z ∈ U, z 0 ∈ U 0 } . Note that x 2 (0) = Q η ( x 1 (0)) , and then one has k x 1 (0) − x 2 (0) k = k x 1 (0) − Q η ( x 1 (0)) k ≤ η , ∀ x 1 (0) ∈ R n . Therefore, one can define ˆ X 0 := { ( x 1 , x 2 ) ∈ ˆ X |k x 1 − x 2 k ≤ η } (5) as the set of initial states for ˆ Σ . T o guarantee that u ( t ) = u v ( v ( t ) , x 1 ( t ) , x 2 ( t )) ∈ U, ∀ t , we propose the following definition. Definition 3: The control interface u v : U 0 × R n × [ R n ] η → U is called admissible to ˆ Σ if u v ( v ( t ) , ξ ( ξ 0 , u v , t ) , ξ 0 ( ξ 0 0 , v , t )) ∈ U , ∀ ( ξ 0 , ξ 0 0 ) ∈ ˆ X 0 , ∀ v ( t ) ∈ U 0 . Let ˆ U τ = { ˆ u : [0 , τ [ → ˆ U } and ˆ U = ∪ τ > 0 ˆ U τ . The trajectory of ˆ Σ will be denoted by ˆ ξ . The diagonal set Ω ⊆ R 2 n is defined as: Ω = { z ∈ R 2 n |∃ x ∈ R n : z = ( x, x ) } . (6) Then, we introduce the following definitions which are inspired by [16]. Definition 4: The augmented control system ˆ Σ is called contr olled globally asymptotically stable with r espect to the set Ω (C- Ω -GAS) if it is FC and there exists an admissible control interface u v : U 0 × R n × [ R n ] η → U , and a KL function β such that for any t ∈ R ≥ 0 and any ( x 0 , x 0 0 ) ∈ ˆ X 0 , the following condition is satisfied: d( ˆ ξ ( ˆ ξ 0 , ˆ u, t ) , Ω) ≤ β (d( ˆ ξ 0 , Ω) , t ) , where ˆ ξ 0 = ( x 0 , x 0 0 ) and ˆ u = ( u v , v ) . Definition 5: The augmented control system ˆ Σ is called contr olled globally practically stable with r espect to the set Ω (C- Ω -GPS) if it is FC and there exists an admissible control interface u v : U 0 × R n × [ R n ] η → U , a KL function β and a bounded function ω ( t ) , such that for any t ∈ R ≥ 0 and any ( x 0 , x 0 0 ) ∈ ˆ X 0 , the following condition is satisfied: d( ˆ ξ ( ˆ ξ 0 , ˆ u, t ) , Ω) ≤ β (d( ˆ ξ 0 , Ω) , t ) + k ω k ∞ . Moreov er , u v is called an interface for ˆ Σ , associated to the C- Ω -GAS (C- Ω -GPS) property . Remark 1: According to Definition 3, a general idea on determining the set U 0 can be provided as follows: firstly , we ignore the input constraint by assuming that U = R m , finding a (set of) control interface(s) u v such that ˆ Σ is C- Ω -GAS (C- Ω -GPS). Then, consider the real input set U and choose U 0 to be the maximal subset of U such that the control interface u v is admissible. Remark 2: W e note that C- Ω -GAS and C- Ω -GPS are properties defined on the augmented control system ˆ Σ rather than the concrete system Σ . Moreover , for concrete systems that are not incrementally stable, these properties can still hold. Example 1: Consider the follo wing nonlinear system Σ : ( ˙ x 1 ( t ) = Ax 1 ( t ) + m sin( x 1 ( t )) + u ( t ) y 1 ( t ) = x 1 ( t ) , (7) where x 1 , y 1 , u ∈ R n , A ∈ R n × n is a constant matrix and m ∈ R is a constant. One can verify that (7) is not incrementally (input-to-state) stable. Applying the state abstraction (2), then the abstract system can be written as Σ 0 : ( x 2 ( t ) = Q η ( ϕ ( Q η ( x 1 (0)) , v , t )) y 2 ( t ) = x 2 ( t ) , (8) where ˙ ϕ ( t ) = Aϕ ( t ) + m sin( ϕ ( t )) + v ( t ) and v ( t ) ∈ U 0 . Let matrices P = P T 0 , R and a scalar α > 0 be the solutions to the following linear matrix inequality (LMI) A T P + P A + 2 R + 2 αP P P 0 + m 2 I n 0 n 0 n − I n ≤ 0 . (9) Then, the control interface u v is designed as u v ( v ( t ) , x 1 ( t ) , x 2 ( t )) = v ( t ) + P − 1 R ( x 1 ( t ) − x 2 ( t )) . (10) One can see that u v is admissible for all U 0 ⊆ R n . Moreov er , according to Lemma 3.5 of [16], one has that ∀ x 1 , x 2 , d( x, Ω) = k x 1 − x 2 k , where x = ( x 1 , x 2 ) and Ω is defined in (6). Then, one can v erify that d( x ( t ) , Ω) ≤ β (d( k x (0) k , Ω) , t ) + C, where β ( z , t ) = s λ max ( P ) λ min ( P ) e − ( α − a 2 ) t z , C = s k R T P − 1 R k a (2 α − a ) λ min ( P ) + 1 ! η . That is, the augmented system ˆ Σ := (Σ , Σ 0 ) is C- Ω -GPS. Pr oposition 1: Consider the augmented control system ˆ Σ . If ˆ Σ is C- Ω -GAS, then one has ∀ t ∈ R ≥ 0 , ∀ ( x 0 , x 0 0 ) ∈ ˆ X 0 , k ξ ( x 0 , u v , t ) − ξ 0 ( x 0 0 , v , t ) k ≤ β ( k x 0 − x 0 0 k , t ) , where β is the K L function defined in Definition 4. Pr oposition 2: Consider the augmented control system ˆ Σ . If ˆ Σ is C- Ω -GPS, then one has ∀ t ∈ R ≥ 0 , ∀ ( x 0 , x 0 0 ) ∈ ˆ X 0 , k ξ ( x 0 , u v , t ) − ξ 0 ( x 0 0 , v , t ) k ≤ β ( k x 0 − x 0 0 k , t ) + k ω k ∞ , where β is the K L function defined in Definition 5. The follo wing definition of C- Ω -GAS (C- Ω -GPS) L ya- punov function is moti vated by [19]. Definition 6: A function V : R n × R n → R ≥ 0 is an C- Ω - GAS L yapunov function and u v : U 0 × R n × [ R n ] η → U is an associated admissible control interface if there exist K ∞ functions α, ¯ α such that i) ∀ x, x 0 ∈ R n , α ( k x ( t ) − x 0 ( t ) k ) ≤ V ( x ( t ) , x 0 ( t )) ≤ ¯ α ( k x ( t ) − x 0 ( t ) k ); (11) ii) ∀ ( x 0 , x 0 0 ) ∈ ˆ X 0 and ∀ v ( t ) ∈ U 0 , ∂ V ∂ x f ( x ( t ) , u v ( v ( t ) , x ( t ) , Q η ( x 0 ( t ))))+ ∂ V ∂ x 0 f ( x 0 ( t ) , v ( t )) ≤ 0 , (12) where x ( t ) = ξ ( x 0 , u v , t ) , x 0 ( t ) = ξ ( x 0 0 , v , t ) . Function V is called a C- Ω -GPS L yapunov function and u v : U 0 × R n × [ R n ] η → U is an associated admissible control interface, if there exist K ∞ functions α, ¯ α, σ , and a constant γ > 0 satisfying condition i) and iii) ∀ ( x 0 , x 0 0 ) ∈ ˆ X 0 and ∀ v ( t ) ∈ U 0 , ∂ V ∂ x f ( x ( t ) ,u v ( v ( t ) , x ( t ) , Q η ( x 0 ( t )))) + ∂ V ∂ x 0 f ( x 0 ( t ) , v ( t )) ≤ − γ V ( x ( t ) , x 0 ( t )) + σ ( k ω k ∞ ) . (13) Then, we can get the following theorem. Theor em 1: Consider the augmented control system ˆ Σ and the set Ω . If ˆ Σ is FC and there exists a C- Ω -GAS or C- Ω -GPS L yapunov function and u v : U 0 × R n × [ R n ] η → U an associated admissible control interface, then, ˆ Σ is C- Ω -GPS and u v is the interface for ˆ Σ , associated to the C- Ω -GPS property . Proof: In the following, we will consider the case where there exists a C- Ω -GAS L yapunov function. The other case where there exists a C- Ω -GPS L yapunov function is similar and hence omitted. Let ξ ( t ) := ξ ( Q η ( x 1 (0) , v , t ) for short. Then, we can get x 2 ( t ) = Q η ( ξ ( t )) , ∀ t ≥ 0 and x 2 (0) = ξ (0) = Q η ( x 1 (0) . Let x 1 ( t ) = ξ ( x 1 (0) , u, t ) , where u ( t ) = u v ( v ( t ) , x 1 ( t ) , x 2 ( t )) . Since ( x 1 (0) , ξ (0)) ∈ ˆ X 0 and u v is an admissible control interf ace, one has u v ∈ U, ∀ v ∈ U 0 . More- ov er , there exists a C- Ω -GAS L yapunov function, then one has (12) holds and thus V ( x 1 ( t ) , ξ ( t )) ≤ V ( x 1 (0) , ξ (0)) ≤ ¯ α ( k x 1 (0) − ξ (0) k ) . Then, according to (11), one can further hav e k x 1 ( t ) − ξ ( t ) k ≤ α − 1 ( ¯ α ( k x 1 (0) − ξ (0) k )) and k x 1 ( t ) − x 2 ( t ) k ≤k x 1 ( t ) − ξ ( t ) k + k ξ ( t ) − x 2 ( t ) k ≤ α − 1 ( ¯ α ( k x 1 (0) − x 2 (0) k )) + η . Therefore, ˆ Σ is C- Ω -GPS and u v is the interface for ˆ Σ , associated to the C- Ω -GPS property . I V . S Y M B O L I C M O D E L S Definition 7: Gi ven the concrete system Σ in (1) and the abstract system Σ 0 in (3), let ε > 0 be a giv en precision. W e say that Σ is ε -approximately simulated by Σ 0 if: i) ∀ x 0 ∈ R n , ∃ x 0 0 ∈ [ R n ] η such that ( x 0 , x 0 0 ) ∈ ˆ X 0 , ii) ∀ ( x 0 , x 0 0 ) ∈ ˆ X 0 , ∀ v ∈ U 0 , ∃ u ∈ U such that k h ( ξ ( x 0 , u, t )) − h ( ξ 0 ( x 0 0 , v , t )) k ≤ ε, ∀ t ∈ dom ( v ) . where ˆ X 0 is defined in (5). Remark 3: According to Definition 7, if Σ is ε - approximately simulated by Σ 0 , then for ev ery output tra- jectory ζ 0 in the abstract system Σ 0 , there exists an output trajectory ζ in the concrete system Σ such that ζ 0 and ζ are ε -close. Assumption 1: The output function h : R n → R l is globally Lipschitz continuous with a Lipschitz constant ρ . That is, k h ( x 1 ) − h ( x 2 ) k ≤ ρ k x 1 − x 2 k , ∀ x 1 , x 2 ∈ R n . Then, we can get the following results. Theor em 2: Gi ven the concrete system Σ in (1) and the abstract system Σ 0 in (3), let ε > 0 be a desired precision. Suppose Assumption 1 holds. Assume that there exists a C- Ω -GAS L yapunov function V and let u v be the associated admissible control interface. If α − 1 ( ¯ α ( η )) + η < ε ρ , (14) where ¯ α, α and ρ are defined in Definition 6 and Assumption 1, respecti vely , then, Σ is ε -approximately simulated by Σ 0 . Proof: Gi ven ( x 0 , x 0 0 ) ∈ ˆ X 0 , since there exists a C- Ω -GAS L yapunov function V and u v is the asso- ciated admissible control interface, then, ∀ v ( t ) ∈ U 0 , one has u v ( v ( t ) , ξ ( x 0 , u v , t ) , ξ 0 ( x 0 0 , v , t )) ∈ U . Now , giv en an input signal v ∈ U 0 , one has u ( t ) = u v ( v ( t ) , ξ ( x 0 , u v , t ) , ξ 0 ( x 0 0 , v , t )) ∈ U, ∀ t ∈ dom ( v ) . Thus, u ∈ U and dom ( u ) = dom ( v ) . Let q ( t ) = ξ ( x 0 0 , v , t )) , t ∈ dom ( v ) . Then, one has x 2 ( t ) = ξ 0 ( x 0 0 , v , t ) = Q η ( q ( t )) , ∀ t ∈ dom ( v ) . According to the state abstraction (2), one has k x 2 ( t ) − q ( t ) k ≤ η . Let also x 1 ( t ) = ξ ( x 0 , u v , t )) , t ∈ dom ( u ) , where u v is the admissible control interface. T o prove item ii) of Definition 7, it is sufficient to prov e that k h ( x 1 ( t )) − h ( x 2 ( t ) k ≤ ε, ∀ t ∈ dom ( v ) . Since (12) of Definition 6 holds, one has V ( x 1 ( t ) , q ( t )) ≤ V ( x 0 , x 0 0 ) ≤ ¯ α ( k x 0 − x 0 0 k ) ≤ ¯ α ( η ) . Then, k x 1 ( t ) − q ( t ) k ≤ α − 1 ( V ( x 1 ( t ) , q ( t ))) ≤ α − 1 ( ¯ α ( η )) . In addition, k x 1 ( t ) − x 2 ( t ) k ≤ k x 1 ( t ) − q ( t ) k + k q ( t ) − x 2 ( t ) k ≤ α − 1 ( ¯ α ( η )) + η ≤ ε/ρ, and thus k h ( x 1 ( t )) − h ( x 2 ( t )) k ≤ ρ k x 1 ( t ) − x 2 ( t ) k ≤ ε . Item ii) of Definition 7 thus holds. By definition of [ R n ] η , for all x 0 ∈ R n , there exists x 0 0 ∈ [ R n ] η such that k x 0 − x 0 0 k ≤ η . Then, from Assumption 1, k h ( x 0 ) − h ( x 0 0 ) k ≤ ρ k x 0 − x 0 0 k ≤ ε. Hence, ( x 0 , x 0 0 ) ∈ ˆ X 0 . Item i) of Definition 7 holds and thus Σ is ε -approximately simulated by Σ 0 . For the other case where there e xists a C- Ω -GPS L yapunov function, we need the following additional assumption. Assumption 2: The class K ∞ function α : R ≥ 0 → R ≥ 0 satisfies α − 1 ( a + b ) ≤ α − 1 ( a ) + α − 1 ( b ) , ∀ a, b ∈ R ≥ 0 . W e note that Assumption 2 is actually a triangular inequal- ity , which is satisfied by various K ∞ functions, such as the polynomial functions with nonnegati ve coefficients. Theor em 3: Gi ven the concrete system Σ in (1) and the abstract system Σ 0 in (3). Let ε > 0 be a desired precision. Suppose Assumptions 1-2 hold. Assume that there exists a C- Ω -GPS L yapuno v function V and u v the associated admis- sible control interface. If furthermore, one has σ ( k g k ∞ ) < γ α ( ε/ρ ) and α − 1 ( ¯ α ( η )) + η < ε ρ − α − 1 σ ( k ω k ∞ ) γ , (15) then, Σ is ε -approximately simulated by Σ 0 . Remark 4: Note that when the input set U 6 = R m , it is in general difficult to construct an admissible control interface u v since one needs to guarantee that u v 6 = ∅ , ∀ v ∈ U 0 . The good news is, for a class of incremental quadratic nonlinear systems [23], we sho w in the next section that it is possible to construct an admissible control interface u v , such that Σ is ε -approximately simulated by Σ 0 , for any input set U . V . A P P L I C A T I O N S In this section, we consider a class of incremental quadratic nonlinear systems, for which the systematic con- struction of the admissible control interface is possible. This kind of nonlinear systems are very useful and include many commonly encountered nonlinearities, such as the globally Lipschitz nonlinearity , as special cases. Consider the nonlinear system described by Σ 1 : ( ˙ x ( t ) = Ax ( t ) + B u ( t ) + E p ( C q x + D q p ) , y ( t ) = C x ( t ) . (16) where x ∈ R n , y ∈ R l and u ∈ U = R m are the state, output and control input of the system, respecti vely , p : R l p → R l e represents the kno wing continuous nonlinearity of the system, and A, B , C, E , C q , D q are constants matrices of appropriate dimensions. Definition 8: [17] Giv en a function p : R l p → R l e , a symmetric matrix M ∈ R ( l p + l e ) × ( l p + l e ) is called an incremental multiplier matrix ( δ -MM) for p if it satisfies the following incremental quadratic constraint ( δ -QC) for any q 1 , q 2 ∈ R l p : q 2 − q 1 p ( q 2 ) − p ( q 1 ) ! T M q 2 − q 1 p ( q 2 ) − p ( q 1 ) ! ≥ 0 . (17) Remark 5: The δ -QC condition (17) includes a broad class of nonlinearities as special cases. For instance, the globally Lipschitz condition, the sector bounded nonlinearity , and the positive real nonlinearity p T S q ≥ 0 for some symmetric, in vertible matrix S . Some other nonlinearities that can be expressed using the δ -QC were discussed in [17], [23], such as the case when the Jacobian of p with respect to q is confined in a polytope or a cone. Assumption 3: There exist matrices P = P T 0 , L and a scalar α > 0 such that the following matrix inequality P ( A + B L ) + ( A + B L ) T P + 2 αP P E E T P 0 + C q D q 0 I T M C q D q 0 I ≤ 0 (18) is satisfied, where M = M T is an δ -MM for function p . The abstract system (obtained by applying the state-space discretization (2)) is giv en by Σ 0 1 : ( ξ ( t ) = Q η ( ˆ x ( Q η ( x (0)) , v , t )) , ζ ( t ) = C ξ ( t ) . (19) where ˙ ˆ x ( t ) = A ˆ x + B v ( t ) + E p ( C q ˆ x + D q p ) and v ∈ U 0 . The control interface u v : U 0 × R n × [ R n ] η → U is designed as u v ( v ( t ) , x ( t ) , ξ ( t )) = v ( t ) + L ( x ( t ) − ξ ( t )) , (20) where L is the solution of (18). Then, one can verify that u v is admissible for all U 0 ⊆ R m since U = R m . Then, we get the following result. Theor em 4: Consider the concrete system (16) and the abstract system (19). The input u ( t ) of (16) is synthesized by the control interface (20). Suppose that Assumption 3 holds, and the state-space discretization parameter satisfies η ≤ ε k C k p ak λ min ( P ) p ak λ min ( P ) + q ak λ max ( P ) + k ˆ L k , where k = 2 α − a, 0 < a < 2 α , ˆ L = L T B T P B L and P is the solution to Assumption 3. Then, Σ 1 is ε -approximately simulated by Σ 0 1 . Proof: Let ˆ x ( t ) = ˆ x ( Q η ( x (0)) , v , t ) and e ( t ) = ξ ( t ) − ˆ x ( t ) , then one has k e ( t ) k ≤ η , ∀ t . Define δ ( t ) = x ( t ) − ˆ x ( t ) . Then, from (16) and (19) one has ˙ δ ( t ) = Aδ ( t ) + B L ( δ ( t ) + e ( t )) + E ( p ( C q x + D q p ) − p ( C q ˆ x + D q p )) = A c δ ( t ) + B Le ( t ) + E Φ p ( x, ˆ x ) , where A c = A + B L and Φ p ( x, ˆ x ) = p ( C q x + D q p ) − p ( C q ˆ x + D q p ) . Post and pre multiplying both sides of inequality (9) by ( δ ( t ) , Φ p ( x, ˆ x )) and its transpose and using condition (17) we obtain δ T P ˙ δ ≤ − αδ T P δ + δ T P B Le. Consider the following L yapunov function candidate V ( x, ˆ x ) = ( x − ˆ x ) T P ( x − ˆ x ) . (21) Then, one has λ min ( P ) k x − ˆ x k 2 ≤ V ( x, ˆ x ) ≤ λ max ( P ) k x − ˆ x k 2 . T aking the deriv ati ve of V on t , one has ˙ V ( x, ˆ x ) = 2 δ T P ˙ δ ≤ − k V ( x, ˆ x ) + 1 a k ˆ L k η 2 . Therefore, V ( x, ˆ x ) is a valid C- Ω -GPS L yapunov function for ˆ Σ 1 := (Σ 1 , Σ 0 1 ) , where α ( x ) = λ min ( P ) x 2 , ¯ α ( x ) = λ max ( P ) x 2 and σ ( k ω k ∞ ) = (1 /a ) k ˆ L k η 2 . In addition, one can verify that Assumption 1 holds with ρ = k C k , and Assumption 2 holds. Then, the conclusion follows by applying Theorem 3. When the input set U = R m , the construction of ad- missible control interface u v is relatively easy since u v is always admissible. Howe ver , in practical applications, input saturations are common constraints. In the following, we will show that the results in Theorem 4 still hold when the set U 6 = R m with the following modifi- cations. Now , we consider the same control interface u v as in (20). T o guarantee that (20) is admissible, we need to find a set U 0 such that u v ∈ U, ∀ v ∈ U 0 , ∀ ( x (0) , ξ (0)) ∈ ˆ X 0 . From Theorem 4, we hav e that ˙ V ( x ( t ) , ˆ x ( t )) ≤ − k V ( x ( t ) , ˆ x ( t )) + 1 a k ˆ L k η 2 . From the comparison principle, we get that V ( x ( t ) , ˆ x ( t )) ≤ e − kt V ( x (0) , ˆ x (0)) + k ˆ L k η 2 ak (1 − e − kt ) ≤ λ max ( P ) η 2 + k ˆ L k η 2 ak . Then, one can further hav e k x ( t ) − ˆ x ( t ) k ≤ p V ( x ( t ) , ξ ( t )) /λ min ( P ) ≤ K 1 η , where K 1 = q λ max ( P ) /λ min ( P ) + k ˆ L k / ( ak λ min ( P )) , and k x ( t ) − ξ ( t ) k ≤ k x ( t ) − ˆ x ( t ) k + k ˆ x ( t ) − ξ ( t ) k ≤ ( K 1 + 1) η . Define e u ( t ) = u ( t ) − v ( t ) . Then, one has k e u ( t ) k = k L ( x ( t ) − ξ ( t )) k ≤ k L k ( K 1 + 1) η . That is, k e u ( t ) k is upper bounded and the radius of the upper bound is determined by η (due to the special form of control interface that was designed in (20)). Let ˜ U = z ∈ U | d( z, F r ( U )) < k L k ( K 1 + 1) η , be the set of points in U , whose distance to the boundary of U is less than k L k ( K 1 + 1) η . Then, by choosing U 0 = U \ ˜ U , one can guarantee that u v ∈ U, ∀ v ∈ U 0 . Note that one can always find U 0 6 = ∅ by letting η be small enough since U 0 → U when η → 0 . V I . S I M U L A T I O N Consider the nonlinear system Σ giv en in (7), where A = (0 . 15 , 0; 0 , 0 . 5) , m = 2 and n = 2 . The abstract system Σ 0 is giv en in (8). Let ε = 0 . 5 be the desired precision. The control interface is given by (10), where P = I 2 , R = − 5 I 2 is the solution of the LMI (9) by letting α = 2 . 4 . According to Theorem 4, the desired precision ε = 0 . 5 can be achiev ed by choosing the state-space discretization parameter η = 0 . 15 . The simulation results are shown in Figs. 1-3. The trajec- tory x 2 of Σ 0 is obtained by applying a piece-wise constant control input v ( t ) , and it is represented by the solid red line in Fig. 1 ( x 2 , 1 , x 2 , 2 are the two state components of x 2 ). The trajectory x 1 of Σ is obtained via the control interface (10), and it is represented by the solid blue line in Fig. 1 ( x 1 , 1 , x 1 , 2 are the tw o state components of x 1 ). The e volution of the output error k y 1 − y 2 k is depicted in Fig. 2, and one can see that the desired precision 0.5 is satisfied at all times. The ev olution of the input components v 1 , v 2 for the abstract system Σ 0 and the input components u 1 , u 2 for the concrete system Σ is plotted in Fig. 3, respectiv ely . 0 1 2 3 4 5 6 t -14 -12 -10 -8 -6 -4 -2 x 1,1 x 2,1 0 1 2 3 4 5 6 t -4.4 -4.2 -4 -3.8 -3.6 -3.4 -3.2 -3 -2.8 -2.6 x 1,2 x 2,2 Fig. 1: The trajectories of the concrete system Σ and the abstract system Σ 0 . 0 1 2 3 4 5 6 t 0 0.05 0.1 0.15 0.2 0.25 0.3 ||y 1 -y 2 || Fig. 2: The ev olution of k y 1 − y 2 k . 0 1 2 3 4 5 6 t -4 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 u 1 v 1 0 1 2 3 4 5 6 t -1 -0.5 0 0.5 1 1.5 2 2.5 3 3.5 4 u 2 v 2 Fig. 3: The ev olution of the inputs u and v . V I I . C O N C L U S I O N This paper inv olved the construction of discrete symbolic models for continuous-time nonlinear systems. Based on a ne w stability notion called controlled globally asymp- totic/practical stability with respect to a set, it w as shown that ev ery continuous-time concrete system, under the condition that there exists an admissible control interface such that the augmented system can be made controlled globally practically stable with respect to a given set, is approximately simulated by its discrete (state-space) abstraction. In the future, the input quantization, external disturbances, and more ef ficient abstraction techniques, such as multi-scale abstraction will be taken into account. R E F E R E N C E S [1] P . T abuada, “V erification and control of hybrid systems: a symbolic approach”, Springer Science & Business Media , 2009. [2] A. Girard, “Controller synthesis for safety and reachability via approx- imate bisimulation”, Automatica , vol. 48, no. 5, pp. 947-953, 2012. [3] P . J. Ramadge and W . M. W onham, “Modular feedback logic for discrete e vent systems”, SIAM Journal on Control and Optimization , vol. 25, no. 5, pp. 1202-1218, 1987. [4] R. Kumar and V . Garg, Modeling Control of Logical Discrete Event Systems. Boston, MA: Kluwer , 1995. [5] C. Cassandras and S. Lafortune, Introduction to Discrete Ev ent Systems. Boston, MA: Kluwer , 1999. [6] A. Arnold, A. V incent, and I. W alukiewicz, “Games for synthesis of controllers with partial observation”, Theor etical Computer Science , vol. 28, no. 1, pp. 734, 2003. [7] P . Madhusudan, W . Nam, and R. Alur , “Symbolic computational techniques for solving games”, Electr on. Notes Theor et. Comput. Sci. , vol. 89, no. 4, pp. 118-128, 2003. [8] R. Milner, Communication and concurrency . Prentice Hall, 1989. [9] D. M. R. Park, “Concurrency and automata on infinite sequences”, in Theor ectical computer science , vol. 104, pp. 167-183, 1981. [10] R. Alur , T . Henzinger , G. Lafferriere, and G. J. Pappas, “Discrete abstractions of hybrid systems”, Proceedings of the IEEE , vol. 88, no. 7, pp. 971-984, 2000. [11] A. Girard and G. J. Pappas, “ Approximation metrics for discrete and continuous systems”, IEEE T ransactions on Automatic Contr ol , vol. 52, no. 5, pp. 782-798, 2007. [12] D. Angeli, “ A L yapunov approach to incremental stability properties”, IEEE T ransactions on Automatic Contr ol , vol. 47, no. 3, pp. 410-421, 2002. [13] A. Girard, G. Pola, and P . T abuada, “ Approximately bisimilar symbolic models for incrementally stable switched systems”, IEEE T ransactions on Automatic Control , vol. 55, no. 1, pp. 116-126, 2010. [14] M. Zamani, P . M. Esfahani, R. Majumdar , A. Abate and J. L ygeros, “Symbolic control of stochastic systems via approximately bisimilar finite abstractions”, IEEE T ransactions on Automatic Control , vol. 59, no. 12, pp. 3135-3150, 2014. [15] D. Angeli and E. D. Sontag, “Forward completeness, unboundedness observability , and their Lyapuno v characterizations”, Systems & Contr ol Letters , vol. 38, no. 4-5, pp. 209-217, 1999. [16] M. Zamani, N. van de W ouw ,and R. Majumdar, “Backstepping con- troller synthesis and characterizations of incremental stability”, Systems & Contr ol Letters , vol. 62, no. 10, pp. 949-962, 2013. [17] B Akmee and M. Corless, “Observers for systems with nonlinearities satisfying incremental quadratic constraints”, Automatica , vol. 47, no.7, pp. 1339-1348, 2011. [18] R. Goedel, R. G. Sanfelice, and A. R. T eel, Hybrid dynamical systems: modeling stability , and robustness, Princeton University Press, 2012. [19] A. Girard and G. J. Pappas, “Hierarchical control system design using approximate simulation”, Automatica , vol. 45, no. 2, pp. 566-571, 2009. [20] J. Fu, S. Shah, and H. G. T anner , “Hierarchical control via approximate simulation and feedback linearization”, in American Contr ol Conference (ACC) , 2013 (pp. 1816-1821). [21] K. Y ang and H. Ji, “Hierarchical analysis of large-scale control systems via vector simulation function”, Systems & Contr ol Letters , vol. 102, pp. 74-80, 2017. [22] S. W . Smith, M. Arcak, and M. Zamani, “ Approximate abstractions of control systems with an application to aggregation”, arXiv pr eprint arXiv:1809.03621 , 2018. [23] L. D’Alto and M. Corless, “Incremental quadratic stability”, Numeri- cal Algebra, Contr ol & Optimization , vol. 3, no. 1, pp. 175-201, 2013. [24] M. Zamani, G. Pola, M. Mazo, and P . T abuada, “Symbolic models for nonlinear control systems without stability assumptions”, IEEE T ransactions on Automatic Control , vol. 57, no.7, pp. 1804-1809, 2012. [25] G. Reissig, A. W eber, and M. Rungger , “Feedback refinement relations for the synthesis of symbolic controllers”, IEEE T ransactions on Automatic Control , vol. 62, no. 4, pp. 1781-1796, 2017.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment