스마트 다중기계 시스템 실시간 제어와 HIL 성능 분석
본 논문은 Arduino와 Simulink를 연계한 하드웨어‑인‑더‑루프(HIL) 환경에서 두 대의 모터‑제너레이터와 3버스 부하를 갖는 스마트 전력 시스템을 구현한다. 센서로부터 실시간 데이터를 수집하고, Simulink 모델이 예측한 제어 신호를 Arduino가 받아 버스 전압·전류, 발전기 속도 등을 자동 조정함으로써 부하 변동, 고장 상황에서 자가 치유와 부하 전환을 실현한다.
저자: Muhammad Sarwar, Anas Ramzan, Muhammad Usman Naseer
본 논문은 스마트 전력 시스템의 실시간 제어와 성능 평가를 위해 하드웨어‑인‑더‑루프(HIL) 시뮬레이션 환경을 구축하고, 이를 기반으로 다중기계(멀티‑머신) 시스템을 구현한다. 서론에서는 기존 중앙집중형 전력망의 한계와 스마트 그리드(SG)의 필요성을 강조하고, SG 구현을 위해서는 양방향 전력 흐름과 고도화된 통신·제어 인프라가 필수임을 제시한다. 이어서 연구 목표를 ‘실시간 제어, 부하 관리, 고장 탐지 및 자가 치유’를 포함한 통합 제어 시스템 구현으로 정의한다.
II. 프로토타입 구현에서는 두 가지 구현 방식을 소개한다. 첫 번째는 Simulink를 이용한 소프트웨어 구현으로, 센서 데이터 입력, 제어 알고리즘, 출력 신호 생성을 모두 모델링한다. 두 번째는 하드웨어 구현으로, 두 대의 동기 발전기와 DC 모터(프라임 무버)를 결합한 발전기‑모터 세트를 구성하고, 각각에 타코미터, 전압·전류 센서를 부착한다. 센서 데이터는 RS‑232 인터페이스를 통해 전력계에 전달되며, Arduino Due가 이를 수집한다. Arduino는 사전에 정의된 전압·전류 한계값을 기준으로 실시간 오차를 계산하고, 버킷 컨버터(DC‑DC 강하형 변환기)의 듀티 사이클을 조절하거나 릴레이·차단기를 작동시켜 전압·전류를 보정한다.
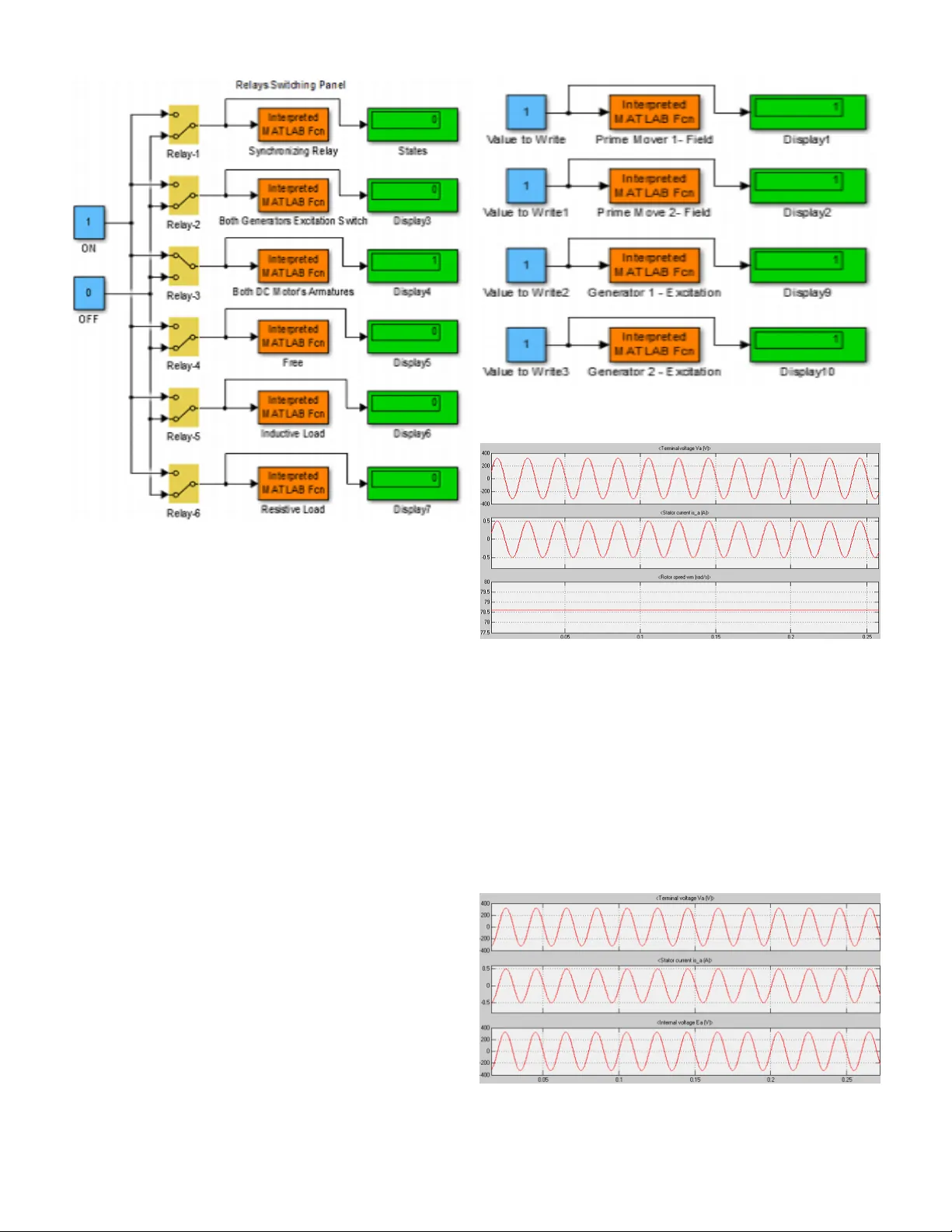
III. 블록 다이어그램 및 구성 요소 명세에서는 전체 시스템 흐름을 도식화한다. 물리 시스템 → 센서 → Arduino → Simulink 모델 → 제어 신호 → Arduino → 액추에이터(버킷 컨버터, 릴레이) → 물리 시스템이라는 순환 구조가 HIL을 형성한다. 주요 부품으로는 1.2 kW·1400 RPM 발전기, 3‑상 10 A 전력 팩, 1 kW·220 V 복합 모터, 3‑극 16 A 스위치, 3.3 V 전압 센서 등이 사용된다.
IV. Simulink 모델에서는 전압·전류 센서 입력을 받아 제어 로직을 실행하고, 그 결과를 Arduino에 전달한다. 모델은 이상적인 전기 파라미터를 기반으로 하며, 부하 변동, 주파수 변동, 고장 상황 등을 시뮬레이션한다. HIL 환경에서 실제 하드웨어와 가상 모델이 동시에 동작하므로, 실시간 응답 시간은 약 1 ms 수준으로 측정된다.
V. 분석 및 결과에서는 시스템이 정상 상태에서 터미널 전압, 전류, 회전 속도가 일정하게 유지됨을 확인한다. 부하가 한 발전기에 집중될 경우, 다른 발전기의 회전 속도가 일시적으로 변동하지만, Arduino와 Simulink 간의 피드백 제어가 빠르게 보정하여 전체 시스템을 안정화한다. 고전류 고장이 발생하면, Arduino는 즉시 릴레이를 차단하고, 버킷 컨버터를 통해 남은 발전기의 전압을 조정한다. 실험 결과는 전압·전류 파형, 회전 속도 변동, 부하 전류 제한 동작 등을 그래프와 파형으로 제시한다.
VI. 결론에서는 스마트 그리드 구현을 위한 실험 플랫폼으로서 본 시스템의 의의를 강조한다. 현재 구현은 2‑머신·3‑버스 구조이며, 향후 IEEE 표준 버스 데이터를 적용한 3‑머신·9‑버스 시스템으로 확장할 수 있다. 또한, GUI 기반 제어 패널을 추가하여 사용자 친화적 모니터링 및 제어가 가능하도록 제안한다. 마지막으로, 고속 Ethernet 통신, 고정밀 전력 전자 변환기, 강화학습 기반 예측 제어 등을 도입해 시스템의 확장성, 신뢰성, 자가 치유 능력을 더욱 강화할 필요성을 제시한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기