실시간 무선 제어를 통한 미래 산업용 모바일 플랫폼 제어
본 데모 논문은 고성능 무선 통신 프레임워크인 GALLOP을 이용해 모바일 로봇(AGV·드론 등)의 실시간 폐쇄‑루프 제어와 리더‑팔로워 기반 형성 제어를 구현한다. 저지연·고신뢰성을 확보함으로써 산업 현장의 유연한 재배치와 협동 로봇 운용이 가능함을 실험적으로 입증한다.
저자: Adnan Aijaz, Aleks, ar Stanoev
본 논문은 산업용 모바일 플랫폼(MP)의 원격 실시간 제어를 위한 무선 통신 솔루션을 제시하고, 이를 실제 로봇 시스템에 적용한 데모 결과를 보고한다. 최근 물류·제조 현장에서 자동 유도 차량(AGV), 드론, 모바일 로봇 등의 활용이 증가하고 있으나, 기존 제어 방식은 현장에 맞춘 유선 연결이나 복잡한 인프라(와이어 가이드, 마그네틱 테이프 등)에 의존한다. 저자는 이러한 제약을 탈피하고, 최소 센서·인프라만으로도 로봇을 자유롭게 배치·재구성할 수 있는 ‘원격 제어’ 패러다임을 제안한다. 원격 제어는 외부 컨트롤러와 로봇 간에 명령과 피드백을 무선으로 주고받는 폐쇄‑루프 구조이며, 제어 루프의 안정성을 위해서는 매우 낮은 지연(Latency)과 높은 전송 신뢰성(Reliability)이 필수적이다.
이를 위해 저자들은 이전 연구에서 개발한 고성능 무선 프로토콜 GALLOP을 채택한다. GALLOP은 PHY‑agnostic 설계로, Bluetooth 5, BLE, IEEE 802.15.4 등 다양한 물리 계층 위에 구현 가능하다. MAC 계층은 TDMA와 FDD, 주파수 홉핑을 결합해 시간·주파수 자원을 효율적으로 할당하고, 제어‑인식형 분산 스케줄링 알고리즘을 통해 양방향 트래픽을 사전에 예약한다. 또한 협력 다이버시티와 효율적인 재전송 메커니즘을 도입해 패킷 손실을 최소화하고, 1 ms 이하의 사이클 타임과 99.9 % 이상의 전송 성공률을 달성한다.
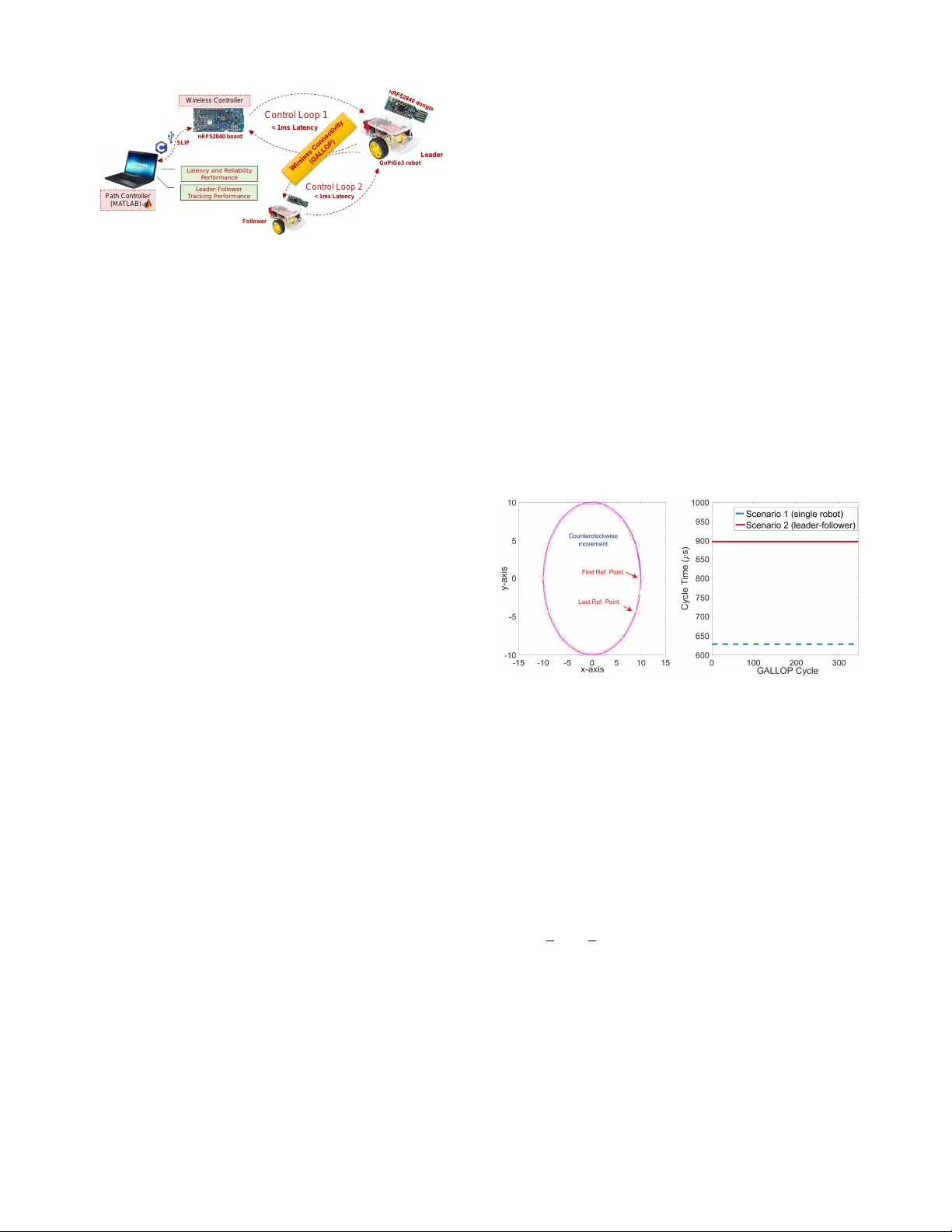
시연 시스템은 GoPiGo3 로봇(라즈베리 파이와 ATmega328 마이크로컨트롤러 기반)과 nRF52840 무선 모듈을 결합한 구조이다. 로봇은 두 개의 구동 휠에 인코더와 적외선 거리 센서를 장착해 위치·속도·장애물 정보를 제공한다. 외부 컨트롤러(PC)는 MATLAB 환경에서 경로 제어 알고리즘을 실행한다. 경로는 일련의 기준점으로 정의되며, 로봇은 현재 위치와 기준점 사이의 오차를 계산해 이차 곡선 기반 속도 프로파일과 로봇 운동학 모델을 이용해 휠 속도를 결정한다. 피드백은 인코더와 거리 센서 데이터를 무선으로 전송받아 실시간으로 업데이트된다.
데모는 두 가지 시나리오로 구성된다. 첫 번째는 단일 로봇이 외부 컨트롤러의 명령에 따라 사전 정의된 경로를 따라 이동하는 경우이다. 로봇은 경로 정보를 사전에 알지 못하고, 실시간 피드백을 기반으로 제어 명령을 수신한다. 실험 결과, GALLOP을 통한 통신 지연은 평균 0.8 ms 이하였으며, 경로 추적 오차는 5 cm 미만으로 유지되었다. 두 번째 시나리오는 리더‑팔로워 형성 제어이다. 리더 로봇이 자신의 위치를 지속적으로 전송하고, 팔로워 로봇은 이를 기준으로 동일 경로를 따라가며 일정한 간격을 유지한다. 이 과정에서도 GALLOP은 양방향 실시간 데이터 교환을 보장했으며, 형성 유지 오차는 10 cm 이내, 지연은 1 ms 이하로 안정적인 플래토닝을 구현했다. 또한, 장애물 감지 시 비상 정지 명령이 즉시 전파되어 두 로봇 모두 30 ms 이내에 정지했으며, 이는 GALLOP이 이벤트‑드리븐 메시지를 신속히 전달할 수 있음을 보여준다.
논문은 GALLOP 기반 무선 제어가 산업 현장의 다양한 응용—예를 들어 드론 플릿 형성 제어, 핵폐기물 현장 로봇, 고속도로 차량 플래토닝, 가상 연동 열차 시스템 등—에 적용 가능함을 제시한다. 또한, 현재 5G·6G 네트워크와 결합해 초저지연·초고신뢰 통신을 구현하는 연구 방향을 제시하며, 무선 기반 폐쇄‑루프 제어가 미래 스마트 팩토리와 Tactile Internet 구현에 핵심 기술임을 강조한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기