드론 기반 안테나 배열의 통신·제어 최적화로 서비스 시간 최소화
본 논문은 다수의 쿼드콥터를 단일 안테나 요소로 활용한 공중 안테나 배열을 설계하고, 사용자에게 제공되는 서비스 시간을 전송 시간과 드론 이동·안정화에 필요한 제어 시간으로 분리하여 최소화하는 프레임워크를 제시한다. 배열 간격을 최적화해 빔포밍 이득을 극대화하고, 사용자의 위치에 따라 드론의 최적 배치를 도출한다. 또한, 외부 풍력·중력 등을 고려한 bang‑bang 제어 이론을 적용해 로터 속도를 최적화하고 최소 제어 시간을 폐쇄형식으로 구한…
저자: Mohammad Mozaffari, Walid Saad, Mehdi Bennis
본 논문은 다중 쿼드콥터를 단일 안테나 요소로 활용한 공중 안테나 배열 시스템을 설계하고, 지상 사용자에게 제공되는 서비스 시간을 최소화하는 종합적인 프레임워크를 제시한다. 연구는 서비스 시간을 전송 시간과 제어 시간으로 분리하여 각각을 최소화하는 두 단계 최적화 문제로 접근한다.
첫 번째 단계는 전송 시간 최소화이다. 전송 시간은 데이터 전송률의 역수이며, 전송률은 배열 이득 G_i와 직접 연결된다. 배열 이득은 배열 팩터 F(θ,φ)와 개별 요소 복사 패턴 w(θ,φ)의 곱으로 정의되며, 여기서 배열 팩터는 각 드론의 위치와 위상에 의해 결정된다. 저자들은 배열 간격을 최적화함으로써 직접ivity를 극대화한다. 비선형 간격 최적화 문제는 섭동 이론을 적용해 연속적인 볼록 최적화 문제들로 분해한다. 각 단계에서 작은 섭동 파라미터를 도입해 기존 해를 미세 조정하고, 수렴성을 보장한다. 최적 간격이 도출되면, 각 지상 사용자의 3차원 좌표에 따라 배열 중심을 기준으로 드론들의 최적 위치를 계산한다. 이때 목표는 사용자의 위치에 대한 빔포밍 이득을 최대화하여 전송률을 높이는 것이다.
두 번째 단계는 제어 시간 최소화이다. 드론이 새로운 사용자에게 서비스를 제공하기 위해서는 현재 위치에서 목표 위치로 이동하고, 안정적인 호버링을 유지해야 한다. 이를 위해 로터 속도를 제어 입력으로 사용한다. 저자들은 외부 풍력·중력 등 외력을 포함한 6자유도 쿼드콥터 동역학 모델을 채택하고, 최소 시간 이동을 위한 bang‑bang 제어 이론을 적용한다. bang‑bang 제어는 가속 구간에서는 로터를 최대 속도로, 감속 구간에서는 최소 속도로 작동시켜 최단 이동 시간을 달성한다. 이 과정에서 최적 전환 시점은 목표 거리, 현재 속도, 외력 크기에 의해 결정되며, 최종적으로 제어 시간 T_ctl은 거리, 질량, 외력, 로터 최대 토크의 함수로 폐쇄형식으로 유도된다.
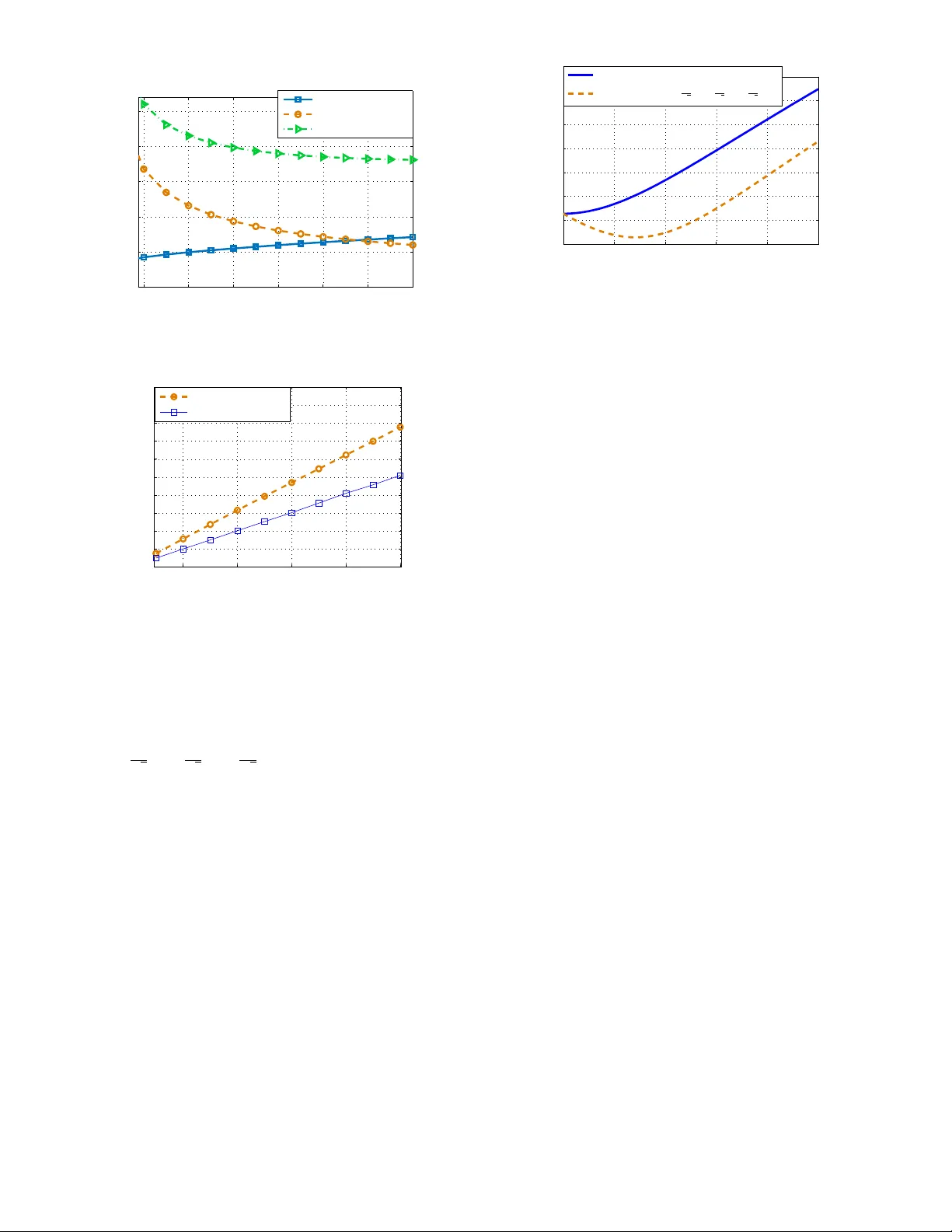
시뮬레이션 결과는 두 가지 주요 성과를 보여준다. 첫째, 최적 간격·위치·제어 전략을 적용한 동적 드론 배열은 동일한 드론 수를 사용한 고정 균일 배열에 비해 평균 서비스 시간을 약 40 % 감소시켰다. 둘째, 스펙트럼 효율이 32 % 향상되었다. 또한, 드론 수를 늘릴수록 전송 시간은 감소하지만 제어 시간이 증가하는 트레이드오프가 존재함을 확인하였다. 이는 외부 풍력 세기와 이동 거리, 드론 간 최소 안전 거리 D_min 등에 따라 최적 드론 수가 달라질 수 있음을 의미한다.
본 연구는 통신 이득 최적화와 물리적 제어 최적화를 하나의 통합 프레임워크로 결합한 최초의 시도이며, 실시간 사용자 요구에 따라 드론 기반 안테나 배열을 동적으로 재구성할 수 있는 실용적인 설계 지침을 제공한다. 향후 연구에서는 2D·3D 배열 확장, 다중 사용자 동시 서비스, 에너지 소비 모델링 등을 포함한 보다 복합적인 시스템 설계가 기대된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기