Communications and Control for Wireless Drone-Based Antenna Array
In this paper, the effective use of multiple quadrotor drones as an aerial antenna array that provides wireless service to ground users is investigated. In particular, under the goal of minimizing the airborne service time needed for communicating wi…
Authors: Mohammad Mozaffari, Walid Saad, Mehdi Bennis
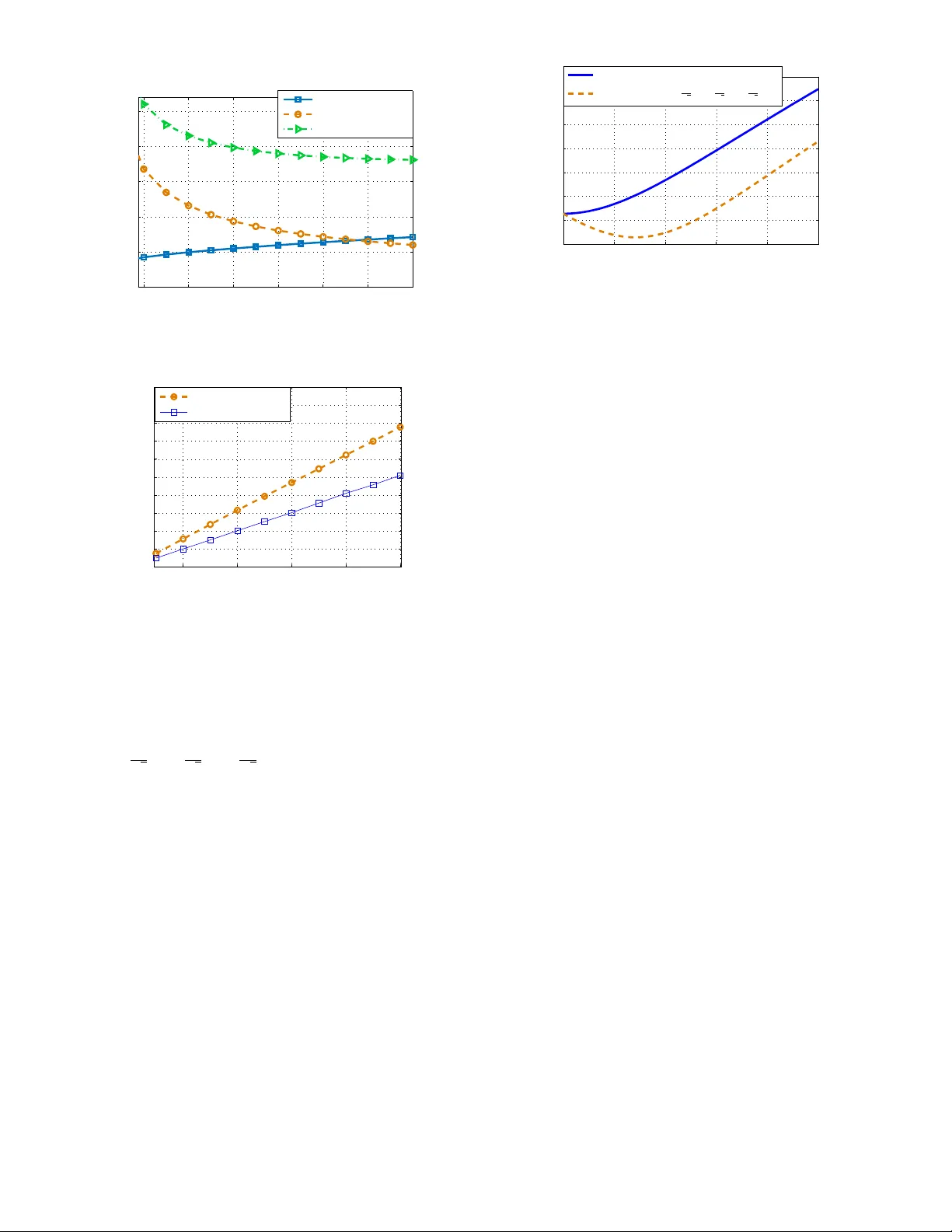
Communications and Control for W ireless Drone-Based Antenna Array Mohammad Mozaf fari 1 , W alid Saad 2 , Mehdi Bennis 3 , and M ´ erouane Debbah 4 1 Ericsson, Santa Clara, CA, USA, Email: mohammad.mozaff ari@ericsson.com. 2 W ireless@VT , Electrical and Computer Engineering Department, V irginia T ech, V A, USA, Email:walids@vt.edu. 3 CWC - Centre for W ireless Communications, Uni versity of Oulu, Finland, Email: bennis@ee.oulu.fi. 4 Mathematical and Algorithmic Sciences Lab, Huawei France R&D, P aris, France, and CentraleSupelec, Univ ersit ´ e Paris-Saclay , Gif-sur-Yvette, France, Email: merouane.debbah@huawei.com. Abstract —In this paper , the effective use of multiple quadrotor drones as an aerial antenna array that provides wireless service to ground users is inv estigated. In particular , under the goal of minimizing the airborne service time needed for communicating with gr ound users, a novel framework for deploying and oper - ating a drone-based antenna array system whose elements are single-antenna drones is proposed. In the considered model, the service time is minimized by minimizing the wireless transmission time as well as the contr ol time that is needed for movement and stabilization of the drones. T o minimize the transmission time, first, the antenna array gain is maximized by optimizing the drone spacing within the array . In this case, using perturbation techniques, the drone spacing optimization problem is addressed by solving successive, perturbed con vex optimization problems. Then, according to the location of each ground user , the optimal locations of the drones ar ound the array’ s center ar e derived such that the transmission time for the user is minimized. Given the determined optimal locations of drones, the drones must spend a control time to adjust their positions dynamically so as to serve multiple users. T o minimize this control time of the quadrotor drones, the speed of rotors is optimally adjusted based on both the destinations of the drones and external f orces (e.g ., wind and gravity). In particular , using bang-bang control theory , the optimal rotors’ speeds as well as the minimum control time are derived in closed-f orm. Simulation results show that the proposed approach can significantly reduce the service time to ground users compared to a fixed-array case in which the same number of drones form a fixed uniform antenna array . The results also show that, in comparison with the fixed-array case, the network’ s spectral efficiency can be impro ved by 32% while leveraging the drone antenna array system. Finally , the results reveal an inherent tradeoff between the control time and transmission time while varying the number of drones in the array . I . I N T RO D U C T I O N The use of unmanned aerial vehicles (U A Vs) such as drones is growing rapidly across many domains including deliv ery , communications, surveillance, and search and rescue in emergency operations [1]–[6]. In wireless networks, drones can be used as flying base stations to provide reliable and cost-effecti ve wireless connecti vity [2]–[12]. Due to their flexibility , agility , and mobility , drones can support reliable, cost-effecti ve, and high data rate wireless communications for ground users. In particular , during major public ev ents Mohammad Mozaff ari joined Ericsson in July 2018. He was with Wire- less@VT , Electrical and Computer Engineering Department, V irginia T ech, V A, USA, when this work was done. such as Olympic games that generate a substantial demand for communication, there is a need to supplement the limited capacity and coverage capabilities of existing cellular net- working infrastructure. In such scenarios, drone-based wireless communication is an ideal solution. For instance, A T&T and V erizon are planning to use flying drones to boost the Internet cov erage for the college football national championship and the Super Bowl.Drones can also play a key role in enabling wireless connectivity in other key scenarios such as public safety , and Internet of Things (IoT) scenarios [4]. T o effec- tiv ely le verage drones for wireless networking applications, one must address a number of challenges that include optimal placement of drones, path planning, resource management, control, and flight time optimization [2], [4], [11]. A. Related work on U A V communications There has been a recent sur ge of literature discussing the use of drones for wireless communication purposes [2]– [7], [9], [11], [13]–[16]. For instance, in [3], the authors studied the optimal 3D placement of UA Vs for maximizing the number of cov ered users with dif ferent quality-of-service (QoS) requirements. The works in [2] and [7] studied path planning and optimal deployment problems for U A V -based communications and computing. The work in [9] proposed a framework for the optimal placement and distribution of U A Vs to minimize the overall delay in a U A V -assisted wireless network. A comparison between the performance of aerial base stations and terrestrial base stations in terms of av erage sum rate and transmit power is presented in [13]. In [14], a polynomial-time algorithm for the optimal placement of drones that provide coverage for ground terminals is proposed. One of the fundamental challenges in drone-based commu- nications systems is the limited flight endurance of drones. Naturally , flying drones have a limited amount of on-board energy which must be used for transmission, mobility , con- trol, data processing, and payloads purposes. Consequently , the flight duration of drones is typically short and can be insufficient for providing a long-term, continuous wireless cov erage. Furthermore, due to the limited transmit power of drones, providing long-range, high rate, and lo w latency communications can be challenging in drone-enabled wireless systems. In this regard, a key performance metric in drone- enabled wireless networks is airborne service time , which is defined as the time needed for servicing ground users. The service time directly impacts the flight time of drones as well as the quality-of-service (i.e., delay) for ground users. From the drones’ perspective, a lower service time corresponds to a shorter flight time as well as less energy consumption. From the users’ point of view , a lo wer service time is also needed as it directly yields lower latency . T o address the flight time and energy consumption challenges of drones, the authors in [5] proposed a comprehensiv e analytical framework for optimizing the trajectory of a fixed-wing U A V with the objectiv e of minimizing the U A V’ s energy consumption while serving a ground user . In particular , a new design paradigm is dev eloped that jointly considers the communication rate and the U A V’ s energy consumption. The work in [15] minimized the hov er time of drone base stations by deriving the optimal cell association schemes. Ho wever , the model in [15] is limited to static single-antenna drones. In [16], the trajectory and mission completion time of a single U A V that serves ground users are optimized. Howe ver , the work in [16] does not analyze a scenario with multiple UA Vs. One promising approach to provide high data rate and low service time is to utilize multiple drones within an antenna array system composed of multiple single-antenna drones [17]. Compared to con ventional antenna array systems, a drone-based antenna array has the following advantages. First, the number of antenna elements (i.e., drones) is not limited by space constraints. Second, the gain of the drone-based antenna array can be increased by adjusting the array element spacing. Third, the mobility and flexibility of drones enable an effecti ve mechanical beam-steering in any three-dimensional (3D) direction. Clearly , a high gain drone-based antenna array can provide high data rate wireless services to ground users thus reducing the service time. In [17], the authors studied the design of a U A V -based antenna array for directivity maximization. Howe ver , the approach presented in [17] is based on a heuristic and a computationally demanding e v olutionary algorithm. Moreov er , the service time analysis is ignored in [17]. In [18], the au- thors deriv ed the asymptotic capacity of an airborne multiple- input-multiple-output (MIMO) wireless communication sys- tem. Howe ver , the work in [18] considers fixed positions for the antenna elements of the transmitter and the receiver . Furthermore, this work does not analyze the control aspect of drones which is essential in designing drone-based MIMO systems. In fact, none of the previous works on drone com- munications, such as in [2]–[4], [6]–[19], has studied the use of a drone-based antenna array system for service time minimization. W e note that, there exist some studies on time-optimal motion planning [20]–[23]. Ho we ver , most of the previous works do not address the time-optimal control problem of quadrotor drones. While the authors in [23] consider a quadro- tor drone in their model, they ignore the effect of external forces on the control time. Furthermore, the approach in [23] is based on a genetic algorithm which is computationally demanding. Unlike our work, the work in [23] ignores the communication aspects of drones, and does not capture the impact of control time on the performance of drone-enabled wireless networks. Compared to [23], our proposed framework comprises both communication and control aspects of drones and it is analytically tractable. B. Contributions The main contrib ution of this paper is a novel frame work for deploying and operating a drone-based antenna array system that delivers wireless service to a number of ground users within a minimum time. In particular, we minimize the service time that includes both the transmission time and the control time needed to control the movement and orientation of the drones. T o this end, we minimize the transmission time, by optimizing the drones’ locations, as well as the control time that the drones need to mov e between these optimal loca- tions. T o minimize the transmission time, first, we determine the optimal drone spacing for which the array directivity is maximized. In this case, using perturbation theory [24], we solve the drone spacing optimization problem by successiv ely solving a number of perturbed con vex optimization problems. Next, giv en the deriv ed drone spacing, we optimally adjust the locations of the drones according to the position of each ground user . In order to serve different users, the drones must dynamically mo ve between the deriv ed optimal locations, during the control time period. T o minimize the control time of quadrotor drones, we determine the optimal speeds of rotors such that the drones can update their positions and orientations within a minimum time. In this case, using bang-bang con- trol theory [25], we derive a closed-form expression for the minimum control time as a function of external forces (e.g., wind and gravity), the drone’ s weight, and the destinations of drones. Our results sho w that the proposed drone antenna array approach can significantly reduce the service time and impro ve the spectral and energy ef ficiency of the network. In particular , our approach yields 32% improvement in spectral efficienc y compared to a case in which the same number of drones form a fixed uniform aerial antenna array . The results also reveal a tradeoff between the control time and transmission time while varying the number of drones. I I . S Y S T E M M O D E L A N D G E N E R A L P R O B L E M F O R M U L A T I O N Consider a set L of L single-antenna wireless users located within a given geographical area. In this area, a set M of M quadrotor drones are used as flying access points to provide downlink wireless service for ground users. The M drones will form an antenna array in which each element is a single- antenna drone, as shown in Fig. 1. For tractability , we consider a linear antenna array whose elements are symmetrically excited and located about the origin of the array as done in [26]. The results that we will deri ve for the linear array case can provide a key guideline for designing more complex 2D and 3D array configurations. The 3D location of drone m ∈ M and of user i ∈ L is giv en by ( x u i , y u i , z u i ) , and the location of D r on e m U ser i ( , , ) m m m x y z ( , , ) u u u i i i x y z A r r a y a x i s O r i gi n of the a r r a y ( , , ) o o o x y z A r r a y B e a m Fig. 1: Drone-based antenna array . drone m while serving user i is ( x m,i , y m,i , z m,i ) . T o avoid collisions, we assume that adjacent drones in the array are sep- arated by at least D min . Let a m and β m be the amplitude and phase of the signal (i.e. excitation) at element m in the array . Let d m,i = q ( x m,i − x o ) 2 + ( y m,i − y o ) 2 + ( z m,i − z o ) 2 be the distance of drone m from the origin of the array whose 3D coordinate is ( x o , y o , z o ) . The magnitude of the far -field radiation pattern of each element is w ( θ, φ ) , where θ and φ are the polar and azimuthal angles in the spherical coordinate. T o serve ground users distributed over a geographical area, the drones will dynamically change their positions based on each user’ s location. In our model, drones ho ver at specific locations to serve a user , and fly to a new position to serve another user . Such repositioning is needed for adjusting the distance and beam direction of the antenna array to each ground user . W e consider a “fly-then-hov er-and-transmit” op- eration (as also done in [27]) for the drone-based antenna array system. In this case, drones transmit when they are stationary and, hence, transmission is not performed while the array moves. Such a transmission protocol is suitable for the considered drone-based antenna array system since the antenna array needs to be stable so as to effecti vely perform beamforming and to establish reliable communication links to ground users. Note that, unlike a classical linear phased array that uses electronic beam steering, the proposed drone-based antenna array relies on the repositioning of drones 1 . This is due to the fact that, in the drone antenna array , precisely adjusting the elements’ phase is more challenging than the phased array whose elements are directly connected. In addition, a linear phased array cannot perform 3D beam steering. Hence, in our model, the drones dynamically adjust their positions in order to steer the beam towards ground users. Clearly , the service time , which is the time needed to serve the ground users, depends on the transmission time and the control time during which the drones must move and stabilize their locations. The transmission time is in versely proportional to the downlink data rate which depends on the signal-to-noise-ratio (SNR) which is, in turn, function of the array’ s beamforming gain. 1 In general, the array gain depends on the elements’ positions and the phase of the elements. In classical antenna array systems with fixed elements, the phase of the elements is often optimized. Here, we exploit the drones’ flexibility to maximize the array directivity by optimizing the element (i.e., drone) spacing, given the elements’ phases. The service time is an important metric for both users and drones. A lower service time yields a lower delay and, hence, higher quality-of-service for the users. Also, the service time is directly related to spectral efficienc y as it depends on data rate and transmission bandwidth. For drones, a lo wer service time corresponds to a shorter flight time and less energy consumption. In fact, minimizing the service time improves both energy and spectral ef ficiency . Therefore, our goal is to minimize the total service time of the ground users by optimally adjusting the drones’ locations, within a minimum control time, that can provide a maximum data rate. For drone-to-ground communications, we consider a line-of- sight (LoS) propagation model as done in [2] and [16]. Such a channel model is reasonable here as the effect of multipath is significantly mitigated due to the high altitude of drones and using beamforming [16]. The transmission rate from the drone antenna array to ground user i in a far -field region is giv en by [16]: R i ( x i , y i , z i ) = B log 2 1 + r − α i P t K o G i ( x i , y i , z i ) σ 2 , (1) where x i = [ x m,i ] M × 1 , y i = [ y m,i ] M × 1 , z i = [ z m,i ] M × 1 , m ∈ M representing the 3D coordinates of the drones while serving user i . B is the transmission bandwidth, r i is the distance between the origin of the array and user i , P t is the total transmit po wer of the array , σ 2 is the noise po wer , and K o is the constant path loss coefficient. G i ( x i , y i , z i ) is the gain of the antenna array towards the location of user i . In the proposed drone-based antenna array system, each drone is an antenna element of the array . In this case, the entire antenna array can be modeled as a single directional antenna whose gain is the total array gain [28]. The array gain is giv en by [29]: G i ( x i , y i , z i ) = 4 π | F ( θ i , φ i ) | 2 w ( θ i , φ i ) 2 2 π R 0 π R 0 | F ( θ , φ ) | 2 w ( θ, φ ) 2 sin θ d θ d φ η , (2) where 0 ≤ η ≤ 1 is the antenna array efficienc y which is multiplied by directivity to compute the antenna gain. In fact, the antenna gain is equal to the antenna directi vity multiplied by η . In (2), F ( θ , φ ) is the array factor which can be written as [29]: F ( θ , φ )= M X m =1 a m e j [ k ( x m,i sin θ cos φ + y m,i sin θ sin φ + z m,i cos θ )+ β m ] , (3) where k = 2 π /λ is the phase constant, and λ is the wav e- length. Note that, the ov erall radiation pattern of the antenna array is equal to F ( θ , φ ) w ( θ i , φ i ) which follows from the pattern multiplication rule [29]. Now , the total time that the drones spend to service the ground users will be: T service = L X i =1 q i R i ( x i , y i , z i ) + T crl i ( V , x i , y i , z i ) , (4) where T service represents the total service time, q i is the load of user i which represents the number of bits that must be transmitted to user i . T crl i is the control time during which the drones adjust their locations according to the location of ground user i . In particular , T crl i captures the time needed for updating the drones’ locations from state i − 1 (i.e., locations of drones while serving user i − 1 , i > 1 ) to state i . The control time is obtained based on the dyn a mics of the drones and is a function of control inputs, external forces, and the mov ement of drones. In fact, each drone needs a vector of control inputs in order to mov e from its initial location to a new location while serving different users. For quadrotor drones, the rotors’ speeds are commonly considered as control inputs. Therefore, in (4), we hav e V = [ v mn ( t )] M × 4 with v mn ( t ) being the speed of rotor n of drone m at time t . The maximum speed of each rotor is v max . In this case, one can minimize the control time of the drones by properly adjusting the rotors’ speeds. In Section IV, we will provide a detailed analysis of the control time giv en the drones’ dynamics. Clearly , to effecti vely employ drones within an aerial an- tenna array , it is crucial to ensure the stability of the drones. Hence, in the proposed drone-based antenna array system, we adopt quadrotor drones which can hover (remain stationary) and mov e to any direction [30]. In Section IV , we analyze the stability of the drones in the array when serving ground users. W e derive the optimal rotors’ speeds for which the quadrotor drones can stabilize their positions. Moreover , we account for wind effects while analyzing the drones’ stability 2 . Giv en this model, our goal is to minimize the total service time of drones by finding the optimal locations of the drones with respect to the center of the array , as well as the optimal control inputs. Our optimization problem, in its general form, is giv en by: minimize X , Y , Z , V L X i =1 q i R i ( x i , y i , z i ) + T crl i ( V , x i , y i , z i ) , (5) st. d m +1 ,i − d m,i ≥ D min , ∀ m ∈ M\{ M } , (6) 0 ≤ v mw ( t ) ≤ v max , ∀ m ∈ M , w ∈ { 1 , ..., 4 } , (7) where X , Y , and Z are matrices whose rows i are, respec- tiv ely , vectors x i , y i , and z i , ∀ i ∈ L . The constraint in (6) indicates that the minimum separation distance between two adjacent drones must be greater than D min to av oid collision. (7) represents the constraints on the speed of each rotor . Note that, the first term in (5) represents the transmission time which depends on the drones’ locations. The second term, T crl i , is the control time which is a function of the rotors’ speeds as well as the drones’ locations. Solving (5) is challenging as it is highly nonlinear due to (2). Moreov er , as we can see from (3), the array factor is a complex function of the array element’ s positions. In addition, due to the nonlinear nature of quadrotor’ s dynamic system, finding the optimal control inputs is a challenging task, as will be discussed in Section IV. 2 W e also note that the proposed drone-based antenna array system is more suitable for a low frequency (e.g., below 600 MHz) case in which the wav elength is above 0.5 m. In this case, the array performance will not be significantly affected by drones’ vibrations. W e note that, considering a narrow-beam antenna array communication, (5) can be solved by separately optimizing drones’ locations and rotors’ speeds. In the narrow-beam case, the drone array must perfectly steer its beam to wards each ground user . Hence, we can first determine the optimal drones’ positions and, then, optimize the rotors’ speeds to mov e to these optimal positions within a minimum time. Our approach for solving (5) includes two key steps. First, giv en the location of any ground user , we optimize the locations of the drones in the linear array to minimize the transmission time. Thus, given L ground users, we will hav e L sets of drones’ locations. In the second step, using the result of the first step, we determine the drones’ optimal control strategy to update their locations within a minimum time. Hence, the solution of the transmission time optimization problem (in the first step) is used as inputs to the time-optimal control problem (in the second step). While, in general, this approach leads to a suboptimal solution, it is analytically tractable and practically easy to implement. Next, we will optimize the location of drones to achiev e a minimum transmission time for any arbitrary ground user . I I I . O P T I M A L P O S I T I O N S O F D R ON E S I N A R R AY F O R T R A N S M I S S I O N T I M E M I N I M I Z A T I O N In this section, we determine the optimal positions of the drones in the array based on the location of each user such that the transmission time to the user is minimized. Clearly , giv en (1), (2), and (4), to minimize the transmission time, we need to maximize the array gain (i.e., directivity) towards each ground user . W ithout loss of generality , we consider an even number of drones. For an odd number of drones, the same analysis will still hold. No w , the array factor for M drones located on the x -axis of the Cartesian coordinate can be given by: F ( θ , φ ) = M X m =1 a m e j [ kx m,i sin θ cos φ + β m ] ( a ) = M / 2 X n =1 a n e j [ kd n sin θ cos φ + β n ] + e − j [ kd n sin θ cos φ + β n ] ( b ) = 2 N X n =1 a n cos ( k d n sin θ cos φ + β n ) , (8) where N = M / 2 , and d n is the distance of element n ∈ N = { 1 , 2 , ..., N } from the center of the array (origin). Also, ( a ) follows from the fact that the array is symmetric with respect to the origin, and ( b ) is based on the Euler’ s rule. Now , we can maximize the directivity of the array by optimizing d n , ∀ n ∈ N : maximize d n , ∀ n ∈N 4 π | F ( θ max , φ max ) | 2 w ( θ max , φ max ) 2 2 π R 0 π R 0 | F ( θ , φ ) | 2 w ( θ, φ ) 2 sin θ d θ d φ , (9) where ( θ max , φ max ) are the polar and azimuthal angles at which the total antenna pattern F ( θ, φ ) w ( θ, φ ) has a maximum value. Clearly , solving (9) is challenging due to the non- linearity and complex expression of the objective function of this optimization problem. Moreover , this problem is non- con vex and, hence, cannot be exactly solved using classical con vex optimization methods. Next, we solve (9) by exploiting the perturbation technique [26]. In general, perturbation theory aims at finding the solution of a complex problem, by starting from the exact solution of a simplified version of the original problem [24]. This technique is thus useful when dealing with nonlinear and analytically intractable optimization problems such as (9). A. P erturbation T echnique for Dr one Spacing Optimization T o optimize the distance between drones, we first consider an initial value for the distance of each drone from the origin. Then, we find the optimal perturbation v alue that must be added to this initial value. Let d 0 n be the initial distance for drone n , the perturbed distance is: d n = d 0 n + e n , (10) where e n << λ , with λ being the wa velength, is the perturba- tion value. Given (10), the array factor can be approximated by: F ( θ , φ ) = 2 N X n =1 a n cos k ( d 0 n + e n ) sin θ cos φ + β n = 2 N X n =1 a n cos k d 0 n sin θ cos φ + β n + k e n sin θ cos φ ( a ) ≈ N X n =1 2 a n cos k d 0 n sin θ cos φ + β n − N X n =1 2 a n k e n sin θ cos φ sin k d 0 n sin θ cos φ + β n , (11) where in ( a ) we used the trigonometric properties, and the fact that sin ( x ) ≈ x for small values of x . Clearly , giv en e n << λ , the numerator of (9) can be computed based on the v alues of d 0 n , ∀ n ∈ N . Hence, given d 0 n , our optimization problem in (9) can be written as: min e 2 π Z 0 π Z 0 F ( θ , φ ) 2 w ( θ, φ ) 2 sin θ d θ d φ, (12) s.t. d 0 n +1 + e n +1 − d 0 n − e n ≥ D min , ∀ n ∈ N \{ N } , (13) where e is the perturbation vector having elements e n , n ∈ N . For brevity , we define the following functions: F 0 ( θ , φ ) = N X n =1 a n cos k d 0 n sin θ cos φ + β n , (14) I int ( x ) = 2 π Z 0 π Z 0 x sin θ d θ d φ. (15) Theorem 1. The optimization problem in (12) is con vex, and the optimal perturbation vector is the solution of the following system of equations: e = G − 1 [ q + µ L ] , µ n e n − e n +1 + D min + d 0 n − d 0 n +1 = 0 , ∀ n ∈ N \{ N } , µ n ≥ 0 , ∀ n ∈ N \{ N } . (16) where G = [ g m,n ] N × N is an N × N matrix with: g m,n = I int a m a n ( k sin θ cos φw ( θ, φ )) 2 × sin k d 0 n sin θ cos φ + β n sin k d 0 m sin θ cos φ + β m , (17) and q = [ q n ] N × 1 whose elements are giv en by: q n = I int a n k sin θ cos φw ( θ, φ ) F 0 ( θ , φ ) × sin k d 0 n sin θ cos φ + β n . (18) In (16), µ L is a vector of Lagrangian multipliers, whose element n is µ L ( n ) = µ n +1 − µ n , with µ n being a Lagrangian multiplier associated with constraint n . Pr oof: See Appendix A . Using Theorem 1, we can update the distance of each drone from the origin as follows: d 1 = d 0 + e ∗ , (19) where d 1 = [ d 1 n ] N × 1 , and d 0 = [ d 0 n ] N × 1 , n ∈ N . Clearly , d 1 leads to a better solution than d 0 = [ d n ] N × 1 . In fact, we can proceed and further improve the solution to (12) by updating d 1 . In particular , at step update r ∈ N , we find d ( r ) : d ( r ) = d ( r − 1) + e ∗ ( r ) , (20) where e ∗ ( r ) is the optimal perturbation vector at step r which is obtained based on d ( r − 1) . Note that, at each step, the objectiv e function in (12) decreases. Since the objective function is monotonically de- creasing and bounded from below , the solution con ver ges after sev eral updates. W e note that due to the approximation used in (11), the solution may not be a global optimal. Nev ertheless, as we can see from Theorem 1, it is analytically tractable and, hence, it has a low computational complexity . Here, we use d ∗ to represent the vector of nearly-optimal distances of drones from the original of the array . Next, we use d ∗ to determine the optimal 3D locations of the drones that result in a maximum array directivity towards a given ground user . B. Optimal Locations of Dr ones Here, following from Subsection III-A, we deriv e the op- timal 3D positions of drones that yields a maximum direc- tivity of the drone-based antenna array . Let ( x u i , y u i , z u i ) and ( x o , y o , z o ) be, respectiv ely , the 3D locations of user i ∈ L and the origin of the antenna array . W ithout loss of generality , we translate the origin of our coordinate system to the origin of the antenna array . In other words, we assume that the arrays’ center is the origin of our translated coordinate system. In this case, the 3D location of x y z D r on e m m a x m a x , U ser i , ii M a x i m um di rec t i v i t y * m d D r on e 1 D r on e M Fig. 2: Illustrativ e figure for Theorem 2. user i will be ( x u i − x o , y u i − y o , z u i − z o ) . Subsequently , the polar and azimuthal angles of user i in the spherical coordinate (with an origin of antenna array) are given by: θ i = cos − 1 z u i − z o q ( x u i − x o ) 2 + ( y u i − y o ) 2 + ( z u i − z o ) 2 , (21) φ i = sin − 1 y u i − y o q ( x u i − x o ) 2 + ( y u i − y o ) 2 . (22) Now , the optimal locations of the drones in the antenna array is giv en as follows. Theorem 2. The optimal locations of the drones for maximiz- ing the directivity of the drone-based antenna array tow ards a giv en ground user will be: x ∗ m , y ∗ m , z ∗ m T = R rot d ∗ m sin α o cos γ o , d ∗ m sin α o sin β o , d ∗ m cos α o T , m ≤ M / 2 , − R rot d ∗ m sin α o cos γ o , d ∗ m sin α o sin γ o , d ∗ m cos α o T , m > M / 2 , (23) where α o and γ o are the initial polar and azimuthal angles of drone m ≤ M / 2 with respect to the array’ s center . R rot is the rotation matrix for updating drones’ positions, gi v en by: R rot = a 2 x (1 − δ ) + δ a x a y (1 − δ ) − λa z a x a z (1 − δ ) + λa y a x a y (1 − δ ) + λa z a 2 y (1 − δ ) + δ a y a z (1 − δ ) − λa x a x a z (1 − δ ) − λa y a y a z (1 − δ ) + λa x a 2 z (1 − δ ) + δ , (24) where δ = k q i · q max k , λ = √ 1 − δ 2 , q i = sin θ i cos φ i sin θ i sin φ i cos θ i , q max = sin θ max cos φ max sin θ max sin φ max cos θ max . Moreover , a x , a y , and a z are the elements of vector a = a x , a y , a z T = q i × q max . Pr oof: See Appendix B . Algorithm 1 Optimizing drones’ locations for maximum array gain to wards user i . 1: Inputs: Locations of user i , ( x u i , y u i , z u i ) , and origin of array , ( x o , y o , z o ) . 2: Outputs: Optimal drones’ positions, ( x ∗ m,i , y ∗ m,i , z ∗ m,i ) , ∀ m ∈ M . 3: Set initial values for distance between drones, d . 4: Find e ∗ by using (16)-(18). 5: Update d based on (19). 6: Repeat steps (4) and (5) to find the optimal spacing vector d ∗ . 7: Use (21)-(61) to determine ( x ∗ m , y ∗ m , z ∗ m ) , ∀ m ∈ M . Using Theorem 2, we can find the optimal locations of the drones such that the directivity of the drone-based antenna array is maximized towards any given ground user . Moreov er , this theorem can be used to dynamically update the drones’ positions for beam steering while serving different ground users. Thus far , we hav e determined the optimal locations of the drones in the antenna array to maximize the directivity of the array tow ards any given ground user . Therefore, the data rate is maximized and, hence, the transmission time for serving the user is minimized. In Algorithm 1, we hav e summarized the key steps needed for optimizing the locations of drones with respect to the center of the array . Hence, using Algorithm 1, we can determine the optimal locations of the array’ s drones with respect to each ground user . T o serve multiple users spread over a giv en geograph- ical area, the drones must dynamically move between these determined optimal locations. This, in turn, yields a control time for drone movement that must be optimized. From (5), we can see that the service time decreases by reducing the control time. Therefore, next, using the determined drones’ locations in Section III, we minimize the control time of the drones. I V . T I M E - O P T I M A L C O N T RO L O F D R O N E S Here, our goal is to minimize the control time that the drones spend to move between the optimal locations which are determined in Section III. While moving the drone-based antenna array , we assume that the array rotates around its center in order to steer the beam and serve different users. Hence, the order of the drones (i.e., drones’ indices) on the array does not change while moving the array . This approach significantly facilitates collision avoidance between the drones as their paths do not intersect. In this section, we deriv e the optimal rotors’ speeds for which the quadrotor drones can move and stabilize their positions within a minimum time. Moreover , we account for wind effects while analyzing the drones’ stability in the proposed drone-based antenna array system. A. Dynamic Model of a Quadrotor Dr one Fig. 3 shows an illustrativ e example of a quadrotor drone. This drone has four rotors that can control the hovering and mobility of the drone. In particular , by adjusting the speed of these rotors, the drone can hov er and mov e horizontally or vertically . Let ( x, y , z ) be the 3D position of the drone. Also, x y z 1 v 2 v 3 v 4 v R otor 1 D mg l R o to r 1 b z b x R o to r 3 R o to r 4 R o to r 2 b y Y a w R o l l P i t c h B od y f r a m e T h r u s t Fig. 3: A quadrotor drone. we use ( ψ r , ψ p , ψ y ) to represent the roll, pitch, and yaw angles that capture the orientation (i.e., attitude) of the drone. Roll, pitch, and yaw are rotation angles defined with respect to the body frame. Here, the origin of the body frame coordinate system (represented by the x b - y b - z b axes) is at the center of the drone, x b is along the arm between rotors 1 and 3, y b is along the arm between rotors 2 and 4, and z b is in the direction of the cross product of the x b and y b axes. In this case, roll, pitch, and yaw , are rotations along x b , y b , and z b . The speed of rotor i ∈ { 1 , 2 , 3 , 4 } is gi ven by v i . For a quadrotor drone, the total thrust and torques that lead to the roll, pitch, and yaw mo vements are related to the rotors’ speeds by [31]: T tot κ 1 κ 2 κ 3 = ρ 1 ρ 1 ρ 1 ρ 1 0 − lρ 1 0 lρ 1 − lρ 1 0 lρ 1 0 − ρ 2 ρ 2 − ρ 2 ρ 2 v 2 1 v 2 2 v 2 3 v 2 4 , (25) where T tot is the total thrust generated by the rotors. The direction of the thrust is upward perpendicular to the rotors’ plane, as we can see from Fig. 3. κ 1 , κ 2 , and κ 3 are the torques for roll, pitch and yaw movements. ρ 1 and ρ 2 are lift and torque coefficients, and l is the distance from each rotor to the center of the drone. Now , we write the dynamic equations of a quadrotor drone in presence of an external wind force as follows 3 : ¨ x = (cos ψ r sin ψ p cos ψ y + sin ψ r sin ψ y ) T tot m D + F W x m D , (26) ¨ y = (cos ψ r sin ψ p sin ψ y + sin ψ r cos ψ y ) T tot m D + F W y m D , (27) ¨ z = (cos ψ r cos ψ p ) T tot m D − g + F W z m D , (28) ¨ ψ r = κ 2 I x , (29) ¨ ψ p = κ 1 I y , (30) ¨ ψ y = κ 3 I z , (31) where m D is the mass of the drone, and g is the gravity acceleration. F W x , F W y , and F W z are the wind forces in positiv e x , y , and z directions. Also, I x , I y , I z are constant v alues 3 Note that, here, drag coefficients are assumed to be negligible. which represent the moments of inertia along x , y , and z directions. From (25), we can see that the total thrust, T tot is directly related to the rotor speed. Also, (26)-(28) capture the relationship between T tot and the drone’ s acceleration. Hence, using (25)-(28), we can find the drone’ s accelerations in the x , y , and z directions. These accelerations are directly related to position and velocity of the drone using classical kinematic equations [32]. Giv en the dynamic model of the drone, we aim to find the optimal speeds of the rotors such that the drone moves from an initial location ( x I , y I , z I ) to a ne w location ( x D , y D , z D ) within a minimum time duration. Under such optimal control inputs (i.e., rotors’ speed), the time needed for each UA V to update its location based on the users’ locations will be minimized. Note that the drone must be stationary at its new location and it does not move in x , y , or z direction. Let ( x ( t ) , y ( t ) , z ( t )) and ( ψ r ( t ) , ψ p ( t ) , ψ y ( t )) be the 3D location and orientation of the drone at time t ∈ [0 , T I ,D ] , with T I ,D being the total control time for moving from location I to location D . Now , we can formulate our time-optimal control problem for a drone, moving from location I to location D , as follows: minimize [ v 1 ( t ) ,v 2 ( t ) ,v 3 ( t ) ,v 4 ( t )] T I ,D , (32) st. | v w ( t ) | ≤ v max , ∀ w ∈ { 1 , ..., 4 } , (33) ( x (0) , y (0) , z (0)) = ( x I , y I , z I ) , (34) ( x ( T I ,D ) , y ( T I ,D ) , z ( T I ,D )) = ( x D , y D , z D ) , (35) ( ˙ x ( T I ,D ) , ˙ y ( T I ,D ) , ˙ z ( T I ,D )) = (0 , 0 , 0) , (36) where [ v 1 ( t ) , v 2 ( t ) , v 3 ( t ) , v 4 ( t )] represents the rotors’ speeds at time t . In (33), v max is the maximum possible speed of each rotor . Constraints (34) and (35) sho w the initial and final loca- tion of the drone (which are determined based on Algorithm 1), (36) indicates that the drone will be stationary at its final location. Here, we assume ( ψ r (0) , ψ p (0) , ψ y (0)) = (0 , 0 , 0) . In (32), the goal is to minimize the control time that a drone needs in order to move between two locations, along a linear path. The objective function is the control time, and the optimization variables are the speeds of rotors. In (5), T I ,D is the control time that a quadrotor drone spends to mov e from location I to location D , the optimization v ariables are the speeds of rotors at time t , which are denoted by v 1 ( t ) , v 2 ( t ) , v 3 ( t ) , and v 4 ( t ) . Note that in (5), the control time for serving user i , T crl i , is equal to the maximum control time among the drones that update their positions according to the user . Our problem in (32) is difficult to solve due to its non-linear nature, and coupled relation of the dynamic system parame- ters as well as the infinite number of optimization variables giv en the continuous time interval [0 , T I ,D ] . Consequently , in general, the exact analytical solution to such nonlinear time- optimal control problem may not be explicitly deri ved as pointed out in [22] and [23]. T o provide a tractable solution to our time-optimal control problem in (32), we decompose the mov ements and orientation changes of drones. In particular , we minimize the time durations needed for orientation ad- justment and displacement of the drone, separately . While this approach yields a suboptimal solution, it can be used to derive a closed-form expression for the control inputs (i.e., rotors’ speeds) in (32) and, thus, it is remarkably easy to implement. In addition, the computational time, which is a key constraint in wireless drone systems, can be6t reduced. Now , we aim to deriv e the optimal speeds of rotors for which the drone can update its locations within a minimum time duration. T o this end, we first present the following lemma from control theory [25] which will be then used to deriv e the optimal rotors’ speeds. Lemma 1. (From [25]): Consider the state space equations for an object within time duration [0 , T ] : ˙ x ( t ) = Ax ( t ) + b u ( t ) , u min ≤ u ( t ) ≤ u max , (37) x (0) = x 1 , (38) x ( T ) = x 2 , (39) where x ( t ) ∈ R N s is the state vector of the object at time t ∈ [0 , T ] , N s is the number of state’ s elements. u ( t ) is a bounded control input with u max and u min being its maximum and minimum values. A ∈ R N s × N s and b ∈ R N s are giv en constant matrices. x 1 and x 2 are the initial and final state of the object. Then, the optimal control input that leads to a minimum state update time T ∗ is giv en by [25]: u ∗ ( t ) = ( u max , t ≤ τ , u min , t > τ , (40) where τ is called the switching time at which the control input changes. In this case, the control time decreases by increasing u max and/or decreasing u min . Lemma 1 provides the solution to the time-optimal control problem for a dynamic system which is characterized by (37)- (39). In particular, the optimal control solution giv en in (40) is refereed to as bang-bang solution [25]. In this case, the optimal control input is always at its extreme value (i.e. maximum or minimum). Next, we provide a new lemma (Lemma 2) which will be used along with Lemma 1 to solv e (32). Lemma 2. Consider a drone that needs to mo ve towards a giv en location D (as sho wn in Fig.4), with a coordinate P D = ( x D , y D , z D ) , in presence of an external force F ex = ( F ex ,x , F ex ,y , F ex ,z ) . The drone’ s orientation that leads to a mov ement with the maximum acceleration towards P D is: ψ D p = cos − 1 A cos θ D − | F ex | cos θ ex F , (41) ψ D r = tan − 1 tan β × sin ψ D p , (42) ψ D y = 0 , (43) where A = h F 2 + | F ex | 2 + 2 F | F ex | cos γ + sin − 1 | F ex | F sin γ i 1 / 2 , β = φ D − sin − 1 h | F ex | sin θ ex sin( φ D − φ ex ) F sin ψ D p i , γ = cos − 1 F ex . P D | F ex || P D | , and F is the magnitude of the maximum force of the drone. | F ex | represents the magnitude of D D r one s c en ter L oc a ti on x y z P o l a r A z i m u t h a l Fig. 4: Drone’ s movement in presence of an external force. vector F ex , θ ex = cos − 1 F ex ,z | F ex | , φ ex = tan − 1 F ex ,y F ex ,x , φ D = tan − 1 y D x D , and θ D = cos − 1 z D | P D | . Pr oof: See Appendix C . Lemma 2, can be used to determine the optimal orientation of the drone that enables it to mov e towards an y giv en location in presence of external forces. Next, using Lemmas 1 and 2, we deriv e the speed of each drone’ s rotor for which the control time is minimized. In this case, we find the rotors’ speeds at se veral pre-defined stages in which the drone updates its position or orientation. Theorem 3. The optimal speeds of rotors with which a drone can mov e from location (0 , 0 , 0) , and (0 , 0 , 0) orientation, to location ( x D , y D , z D ) within a minimum control time are giv en by: Stage 1: v 2 = 0 , v 1 = v 3 = 1 √ 2 v max , v 4 = v max , if 0 < t ≤ τ 1 , v 4 = 0 , v 1 = v 3 = 1 √ 2 v max , v 2 = v max if τ 1 < t ≤ τ 2 , v 1 = 0 , v 2 = v 4 = 1 √ 2 v max , v 3 = v max , if τ 2 < t ≤ τ 3 , v 3 = 0 , v 2 = v 4 = 1 √ 2 v max , v 1 = v max , if τ 3 < t ≤ τ 4 . (44) Stage 2: v 1 = v 2 = v 3 = v 4 = v max , if τ 4 < t ≤ τ 5 . (45) Stage 3: v 2 = 0 , v 1 = v 3 = 1 √ 2 v max , v 4 = v max , if τ 5 < t ≤ τ 6 , v 4 = 0 , v 1 = v 3 = 1 √ 2 v max , v 2 = v max , if τ 6 < t ≤ τ 7 , v 1 = 0 , v 2 = v 4 = v max , v 3 = v max , if τ 7 < t ≤ τ 8 , v 3 = 0 , v 2 = v 4 = 1 √ 2 v max , v 1 = v max , if τ 8 < t ≤ τ 9 . (46) Stage 4: v 1 = v 2 = v 3 = v 4 = v max , if τ 9 < t ≤ τ 10 . (47) Stage 5: v 2 = 0 , v 1 = v 3 = 1 √ 2 v max , v 4 = v max , if τ 10 < t ≤ τ 11 , v 4 = 0 , v 1 = v 3 = 1 √ 2 v max , v 2 = v max , if τ 11 < t ≤ τ 12 , v 1 = 0 , v 2 = v 4 = 1 √ 2 v max , v 3 = v max , if τ 12 < t ≤ τ 13 , v 3 = 0 , v 2 = v 4 = 1 √ 2 v max , v 1 = v max , if τ 13 < t ≤ τ 14 . (48) Stage 6: v 1 = v 2 = v 3 = v 4 = v F , if t > τ 14 . (49) Also, the total control time of the drone can be gi v en by: T I ,D = r 2 d D m D A s 2 − m D A s 4 + 2 v max h s ∆ ψ p , 1 I y lρ 1 + s ∆ ψ r , 1 I x lρ 1 + s ∆ ψ p , 3 I y lρ 1 Fig. 5: Drones’ movements during the antenna array rotation (linear path). + s ∆ ψ r , 3 I x lρ 1 + s ∆ ψ p , 5 I y lρ 1 + s ∆ ψ r , 5 I x lρ 1 i , (50) where v max , v in , and v F are, respectively , the maximum, the initial, and the final speeds of rotors. m D is the drone’ s mass, ∆ ψ r ,i and ∆ ψ p ,i are the roll and pitch changes in Stage i . d D is the distance between the initial and final locations of the drone. τ 1 , ..., τ 14 are the switching times at which the rotors’ speeds changes. The v alues of switching times and v F are provided in the proof of this theorem. Pr oof: See Appendix D . In Theorem 3, Stages 1, 3, and 5 correspond to the ori- entation changes, Stages 2 and 4 are related to the drone’ s displacement, and Stage 6 represents the drone’ s stability condition. Note that v F is adjusted such that the drone’ s stability is ensured at its final location. In (50), A s 2 and A s 4 are, respectiv ely , the total forces tow ards the drone’ s destination at Stages 2 and 4. Using Theorem 3, we can find the speeds of the rotors (at different time instances) that enable each to mov e towards its destination within a minimum time. The control time depends on the destination of the drone, external forces (e.g. wind and gravity), the rotors’ speed, and the drone’ s weight. B. Collision A voidance for Moving Dr ones First, we determine a situation in which collision between two drones when updating their locations is possible. Then, we propose a solution to avoid the collision situation. Consider two adjacent drones that need to change their locations, as shown in Fig. 5. Clearly , the minimum distance between drones along their path is x = d sin α , where α and d are sho wn in Fig. 5. In this case, if x ≥ D min , collision does not occur . Therefore, drones can move on a linear path without any collision Howe ver , if x < D min , it is possible that the drones collide while they move. One way to avoid collision is to use non-straight paths for drones. For instance, an arc shape trajectory (as shown in Fig. 6) ensures that the distance between adjacent drones remains above the minimum required distance, D min . C. User Sc heduling Or der Another factor that can impact the total control time of the drones is the user scheduling order . While any arbitrary user scheduling can be considered in our model, we adopt a scheduling order that yields a minimum total control time. T o this end, we solve the following optimization problem which Fig. 6: Drones’ movements during the antenna array rotation (arc path). Algorithm 2 Steps for minimizing the service time by solving (5). 1: Inputs: Locations of users, ( x u i , y u i , z u i ) , ∀ i ∈ L , and origin of array , ( x o , y o , z o ) . 2: Outputs: Optimal drones’ positions, ( x ∗ m,i , y ∗ m,i , z ∗ m,i ) , rotors’ speeds, v mw ( t ) , ∀ m ∈ M , ∀ i ∈ L , w ∈ { 1 , ..., 4 } , and total service time. 3: Using Algorithm 1, find the optimal locations of drones with respect to each user , ( x ∗ m,i , y ∗ m,i , z ∗ m,i ) . 4: Using Theorem 3 and Lemma 2, for each drone, determine the rotors’ speeds for moving from ( x ∗ m,i − 1 , y ∗ m,i − 1 , z ∗ m,i − 1 ) to ( x ∗ m,i , y ∗ m,i , z ∗ m,i ) . 5: Compute the total service time based on (5), (32), and (50). determines the optimal scheduling order: minimize [ a ij ] L × L L X i =1 ,i 6 = j L X j =1 a ij T ij , (51) st. L X j =1 ,j 6 = i a ij = 1 , ∀ i ∈ L , L X i =1 ,i 6 = j a ij = 1 , ∀ j ∈ L , (52) a ij = 1 if user j is serv ed after user i, 0 otherwise , (53) where L is the number of ground users in set L , and T ij is the control time of drones when user j is served after user i . a ij is a binary variable which is 1 if user j is served after user i , and [ a ij ] L × L is a matrix that represents the scheduling order . Constraint (52) indicates that each user is served only once. The optimization problem in (51) is a classical inte ger linear programming which can be solved using various methods such as a branch-and-bound algorithm [33]. In summary , our approach for minimizing the service time, which is composed of the transmission time and the control time, is as follows. In the first step, using the approach in Section III, we minimize the transmission time for each ground user by optimizing the positions of drones with respect to the ground users. Then, based on these determined optimal drones’ locations, we minimize the control time needed for adjusting the movement and orientations of drones. In Algorithm 2, we summarize our approach for minimizing the service time. V . S I M U L ATI O N R E S U LT S A N D A N A L Y S I S For our simulations, we consider a number of ground users uniformly distributed within a square area of size 1 km × 1 km. Unless stated otherwise, the number of users is 100, and the number of drones 4 that form a linear array is assumed to be 4 In our simulations, each drone in the array has an omni-directional antenna, as in [17], [18]. T able I: Main simulation parameters. Parameter Description V alue f c Carrier frequency 300 MHz P i Drone transmit power 0.1 W N o T otal noise power spectral density -157 dBm/Hz N Number of ground users 100 ( x o , y o , z o ) Array’ s center coordinate (0,0,100) in meters q i Load per user 100 Mb α Pathloss exponent 3 I x , I y Moments of inertia 4 . 9 × 10 − 3 kg.m 2 [34] m D Mass of each drone 0.5 kg l Distance of a rotor to drone’s center 20 cm ρ 1 lift coefficient 2 . 9 × 10 − 5 [34] β m − β m − 1 Phase excitation difference for two adjacent antennas π 5( M − 1) T able II: Separation distance of adjacent drones in an aerial antenna array with 10 drones. Drones’ separations (cm) Drones’ separations (cm), Compared to wavelength , f c =300 MHz, λ = 1 m f c =500 MHz, λ = 0.6 m ( λ ) 81.9 49.1 81.9 λ 88.7 53.2 88.7 λ 89.8 54.1 89.8 λ 90.7 54.3 90.7 λ 89.8 54.1 89.8 λ 88.7 53.2 88.7 λ 81.9 49.1 81.9 λ 10. The main simulation parameters are gi ven in T able I. W e compare the performance of our drone-based antenna array system with a case in which a drone-based antenna array uses a fixed uniform drone separation, without any repositioning. For the benchmark, referred to as fixed-array case, we consider half-wa velength drone spacing 5 . First, we sho w an example on how the drones are separated in the proposed drone-based antenna array system. This result is provided in T able II for two different carrier frequencies. Fig. 7 shows the total service time for the drone antenna array and the fixed-array case. For a giv en bandwidth, our proposed drone antenna array outperforms the fixed-array case in terms of service time. This is due to the fact that, in the proposed approach, the drones’ locations (and drone spacing) are optimized such that the array antenna gain towards each user is maximized, hence reducing the transmission time. Fig. 7 also shows the tradeoff between bandwidth and service time. Clearly , the service time decreases by using more bandwidth which effecti vely provides a higher data rate. Fig. 7 shows that the drone antenna array improves spectral efficiency compared to the fixed-array case. For instance, to achiev e 10 minutes of service time, the drone antenna array will require 32% less bandwidth than in the fixed-array scenario. In Fig. 8, we show the impact of the number of users on the service time. Clearly , the service time increases as the number of users increases. For a higher number of users, the drones must deliv er a higher data service which results in a higher transmission time. Moreover , in the proposed drone antenna array case, the control time also increases while increasing the number of users. Fig. 8 shows that our proposed drone antenna array system outperforms the fixed-array case for various number of users. For instance, using our approach, the av erage service time can be reduced by 8 minutes (or 27%) 5 For the fixed-array case, we consider electronic beam steering with a 3 dB gain loss due to an imperfect phase synchronization. 1 2 3 4 5 Bandwidth (Mhz) 5 10 15 20 25 Service time (min) Proposed drone antenna array Fixed drone antenna array Gain Fig. 7: Service time vs. bandwidth for the drone antenna-array and fixed-array cases. 60 80 100 120 140 160 180 200 Number of users 0 5 10 15 20 25 30 35 Service time (min) Proposed drone antenna array Fixed drone antenna array Fig. 8: Service time vs. number of users for the drone antenna array and fixed-array (2MHz bandwidth). while serving 200 users. Meanwhile, the users can recei ve faster wireless services while exploiting the proposed drone antenna array system. Fig. 9 shows how the control, transmission, and service times resulting from the proposed approach for different num- bers of drones in the array . As the number of drones increases, the control time increases. In contrast, the transmission time (for 10 MHz bandwidth) decreases due to the increase of the array gain. Fig. 9 sho ws that, by increasing the number of drones from 10 to 30, the av erage control time increases by 20% while the av erage transmission time decreases by 36%. Therefore, there is a tradeoff between the transmission time and the control time as a function of the number of drones in the array . In Fig. 10, we show ho w the number of users impacts the control time. As we can see from this figure, the control time increases while serving more users. This is due to the fact that, for a higher number of users, the drone-array must mov e more in order to steer its beam toward the users. The control time can be reduced by increasing the maximum speed of the rotors, which is in agreement with Theorem 3. For instance, increasing the maximum rotors’ speed from 300 rad/s to 500 rad/s yields around 35% control time reduction when serving 200 users. 6 10 14 18 22 26 30 50 100 150 200 250 300 Number of drones Time (s) Control time Transmission time Service time Fig. 9: Control, transmission, and service times vs. number of drones. 100 200 300 400 500 0 2 4 6 8 10 12 14 16 18 20 Number of users Total control time (min) v max = 3 00 ra d / s v max = 5 00 ra d / s Fig. 10: T otal control time vs. number of users. Fig. 11 represents the speeds of the rotors needed to en- sure the drone’ s stability in presence of wind, obtained us- ing (80). Clearly , the drone is stable when its total force which is composed of the wind force, gravity , and the drone force is zero. For F wind = | F wind | − → x , the rotor’ s speed must increase as the wind force increases. In the F wind = | F wind | 1 √ 3 − → x + 1 √ 3 − → y + 1 √ 3 − → z case, howe ver , the rotor’ s speed first decreases, and then increases. This is because, when | F wind | ≤ 3 N, the wind force helps hovering the drone by compensating for the gravity . Hence, the drone’ s force can be decreased by decreasing the speed of its rotors. For | F wind | > 3 N, the rotor’ s speed start increasing such that the total force on the drone becomes zero. This result also implies that, in some cases (depending on the magnitude and direction of wind), wind can facilitate hovering of the drone by ov ercoming the gravity force. Howe ver , in case of strong winds, the drone’ s stability may not be guaranteed by adjusting the speed of the rotors. This is because the drone force, which is limited by the maximum rotors’ speeds, cannot ov ercome the external forces. V I . C O N C L U S I O N In this paper, we have proposed a novel framework for employing a drone-enabled antenna array system that can provide wireless services to ground users within a minimum time. T o this end, we have minimized the transmission time and the control time needed for changing the locations and 0 2 4 6 8 10 180 200 220 240 260 280 300 320 Wind force magnitude (N) Speed of each rotor (rad/s) F wind = | F wind | − → x F wind = | F wind | 1 1 √ 3 − → x + 1 √ 3 − → y + 1 √ 3 − → z 2 Fig. 11: Speed of each rotor vs. wind force under the drone’ s stability condition. orientations of the drones. First, we have optimized the positions of drones within the antenna array such that the transmission time for each user is minimized. Next, given the determined locations of drones, we hav e minimized the control time of the quadrotor drones by optimally adjusting the rotors’ speeds. Our results hav e sho wn that the proposed drone antenna array with the optimal configuration yields a significant improvement in terms of the service time, spectral and energy ef ficiency . Our results hav e revealed key design guidelines and fundamental tradeoffs for leveraging in an antenna array system. T o our best kno wledge, this is the first comprehensiv e study on the joint communications and control of drone antenna array systems. A P P E N D I X A. Proof of Theorem 1 First, we find F 2 ( θ , φ ) by using (11): F 2 ( θ , φ ) = 2 F 0 ( θ , φ ) 2 + " 2 N X n =1 a n k e n sin θ cos φ sin k d 0 n sin θ cos φ + β n # 2 − 8 F 0 ( θ , φ ) N X n =1 a n k e n sin θ cos φ sin k d 0 n sin θ cos φ + β n . Subsequently , our objectiv e function in (12) can be written as: I int F 2 ( θ , φ ) w 2 ( θ , φ ) = 4 e T Ge − 2 e T q + I int F 2 0 ( θ , φ ) w 2 ( θ , φ ) , (54) where G and q are gi v en in (17) and (18). Clearly , (54) is a quadratic function of e . Therefore, (54) is con ve x if and only if G is a positive semi-definite matrix. Given (17), we ha ve: y T G y = N X n =1 y n N X m =1 y m g m,n . (55) Now , in (17), let us define z n = a n k sin θ cos φw ( θ, φ ) sin k d 0 n sin θ cos φ + β n , (56) then, using (55), we have: y T Gy = I int " N X n =1 z n y n # 2 . (57) In (15), we can see that I int ( x ) ≥ 0 for x ≥ 0 . Hence, from (57), we can conclude that y T Gy ≥ 0 . Therefore, G is positiv e semi-definite and the objective function in (12) is conv ex. Moreover , the constraints in (13) are af fine functions which are conv ex. Hence, this optimization problem is con vex. Now , we find the optimal perturbation vector e by using Karush-Kuhn-T ucker (KKT) conditions. The Lagrangian function will be: L = e T Ge − 2 e T q + I int F 2 0 ( θ , φ ) w 2 ( θ , φ ) + N − 1 X n =1 µ n e n − e n +1 + D min + d 0 n − d 0 n +1 , (58) where µ n ≥ 0 , n = 1 , ..., N − 1 are the Lagrange multipliers. The necessary and sufficient (due to the con ve xity of the problem) KKT conditions for finding the optimal perturbation vector e are gi ven by: ∇ e [ L ] = 0 , (59) which leads to e = G − 1 [ q + µ L ] , with µ L being a ( N − 1) × 1 vector whose element n is µ L ( n ) = µ n +1 − µ n . Based on the complementary slackness conditions, we have: ( µ n e n − e n +1 + D min + d 0 n − d 0 n +1 = 0 , ∀ n ∈ N \{ N } , µ n ≥ 0 , ∀ n ∈ N \{ N } . (60) Finally , the optimal perturbation vector , e ∗ , can be determined by solving (59) and (60). B. Proof of Theorem 2 In Subsection III-A, we hav e deriv ed the optimal distance of drones from the origin that leads to a maximum array di- rectivity . First, we consider an initial (or arbitrary) orientation, as shown in Figure 2. Let d ∗ m be the optimal distance of drone m ≤ M / 2 from the array’ s center, α o and γ o be the initial po- lar and azimuthal angles of the drone. Based on the considered drones’ locations, let ( θ max , φ max ) = argmax F ( θ , φ ) w ( θ , φ ) be a direction at which the directivity of the array is maxi- mized. Our goal is to achiev e the maximum directivity at a giv en direction ( θ i , φ i ) corresponding to user i . Therefore, we need to change the locations of the drones such that θ i = θ max , and φ i = φ max . T o this end, we align the unit vector (1 , θ max , φ max ) with (1 , θ i , φ i ) in the spherical coordinate and, then, we update the drones’ positions accordingly . In the Cartesian coordinate system, we need to rotate vector q max = sin θ max cos φ max , sin θ max sin φ max , cos θ max T such that it be- comes aligned with q i = sin θ i cos φ i , sin θ i sin φ i , cos θ i T . The rotation matrix for rotating a vector u about another vector a = a x , a y , a z T , with a ω rotation angle, is [35]: R rot = R rot , 1 R rot , 2 R rot , 3 , (61) where R rot , 1 = a 2 x (1 − cos ω ) + cos ω a x a y (1 − cos ω ) + a z sin ω a x a z (1 − cos ω ) − a y sin ω , R rot , 2 = a x a y (1 − cos ω ) − a z sin ω a 2 y (1 − cos ω ) + cos ω a y a z (1 − cos ω ) + a x sin ω , and R rot , 3 = a x a z (1 − cos ω ) + a y sin ω a y a z (1 − cos ω ) − a x sin ω a 2 z (1 − cos ω ) + cos ω . In our problem, the rotation between q max and q i can be done about the normal vector of these vectors, with the rotation angle being the angle between q max and q i . Hence, based on the dot-product and cross-product of vectors, we use a = q i × q max , and ω = cos − 1 ( q i · q max ) to find the rotation matrix in (61). No w , we update the locations of drones using the rotation matrix. Clearly , for m ≤ M / 2 , the initial location of drone m in the Cartesian coordinate is d ∗ m sin α o cos γ o , d ∗ m sin α o sin β o , d ∗ m cos α o T . As a result, the optimal locations of drones for serving user i is gi ven by: x ∗ m , y ∗ m , z ∗ m T = R rot d ∗ m sin α o cos γ o , d ∗ m sin α o sin β o , d ∗ m cos α o T , if m ≤ M / 2 . (62) Finally , due to the symmetric configuration of the antenna array about the origin, the optimal locations of drones m when m > M / 2 are as follows: x ∗ m , y ∗ m , z ∗ m T = − R rot d ∗ m sin α o cos γ o , d ∗ m sin α o sin β o , d ∗ m cos α o T , if m ≤ M / 2 . (63) This completes the proof. C. Proof of Lemma 2 T o maximize the drone’ s acceleration tow ards the giv en lo- cation D , we need to maximize the total force in the direction of P D . Considering the center of the drone as the origin of the Cartesian and spherical coordinate systems, we can present the vectors of forces and the mov ement as in Fig. 4. In this figure, based on the Cartesian-to-spherical coordinates transforma- tion, the polar and azimuthal angles in the spherical coordinate are giv en by θ ex = cos − 1 F ex ,z | F ex | , φ ex = tan − 1 F ex ,y F ex ,x , φ D = tan − 1 y D x D , and θ D = cos − 1 z D | P D | . Let α and β be, respecti vely , the polar and azimuthal angles of the drone’ s force. Here, we seek to determine α and β such that the drone can mov e tow ards location D with a maximum acceleration (i.e., maximum total force). In this case, the total force F ex + F must be in the same direction as P D . Let γ be the angle between F and P D , and q be the angle between F ex and P D . T o ensure that F ex + F is in the direction of P D , we should hav e: | F ex | sin γ = | F | sin q = F sin q . (64) Also, using the inner product formula, γ is giv en by: γ = cos − 1 F ex · P D | F ex || P D | . (65) As a result, q will be: q =sin − 1 | F ex | | F | sin cos − 1 F ex . P D | F ex || P D | . (66) Now , based on the law of cosines, the total force magnitude is equal to: A ∆ = | F ex + F | = F 2 + | F ex | 2 + 2 F | F ex | cos γ + sin − 1 | F ex | F sin γ 1 / 2 . (67) By projection ( F ex + F ) , F ex , and F on z -axis and x − y plane, we hav e: A cos θ D = | F ex | cos θ ex + F cos α, (68) | F ex | sin θ ex sin ( φ D − φ ex ) = F sin α sin ( φ D − β ) . (69) Subsequently , we obtain α and β as follows: α = cos − 1 A cos θ D − | F ex | cos θ ex F , (70) β = φ D − sin − 1 | F ex | sin θ ex sin ( φ D − φ ex ) F sin ψ D p . (71) Finally , considering the fact that the drone’ s force is perpen- dicular to its rotors’ plane, as well as using the transformation between body-frame and earth-frame, the drone’ s orientation can be giv en by 6 : ψ D p = α, ψ D r = tan − 1 tan β × sin ψ D p , ψ D y = 0 , (72) which prov es Lemma 2. D. Proof of Theorem 3 Let s ( t ) be the distance that the drone moves tow ards destination D at time t . W e define state g ( t ) = [ s ( t ) , ˙ s ( t )] T , and provide the follo wing equation: ˙ g ( t ) = 0 1 0 0 g ( t ) + 0 1 a D ( t ) , (73) where a min ≤ a D ( t ) ≤ a max is the drone’ s acceleration tow ards D , with a min and a max being the minimum and maximum values of a D ( t ) . Clearly , the drone can reach the destination and stop at D within duration T , if g ( T ) = [0 , 0] T . Based on Lemma 1, T is minimized when a D ( t ) = ( a max , 0 < t ≤ τ , a min , τ < t ≤ T . . Now , we find τ by using kinematic equations that describe an object’ s motion. Let d D be the distance between the initial and the final locations of the drone. Clearly , the drone’ s displacement until t = τ is equal to 1 2 a max τ 2 . During τ < t ≤ T , the displacement will be 1 2 a min ( T − τ ) 2 + a max τ ( T − τ ) . Hence, the total drone’ s disparagement is: d D = 1 2 a max τ 2 + 1 2 a min ( T − τ ) 2 + a max τ ( T − τ ) . (74) Also, considering the fact that drone stops (i.e. zero speed) at t = T , we hav e: a max τ + a min ( T − τ ) = 0 , (75) According to (74) and (75), the total control time, T , and the switching time can be found by: T = r 2 d D ( 1 a max − 1 a min ) , (76) 6 W e consider (0 , 0 , 0) as the initial orientation. T o change the orientation, we first update the pitch and, then, update the roll. τ = a min a min − a max T . (77) As we can see from (76), T can be minimized by maximiz- ing a max and minimizing a min . T o this end, we will adjust the drone’ s orientation as well as the rotors’ speeds. Each drone’ s orientation can be determined by using Lemma 2. Also, giv en (25)-(28), we can sho w that the optimal speeds of the rotors are v 1 = v 2 = v 3 = v 4 = v max . T o adjust the drone’ s orientation within a minimum time, we minimize the time needed for the pitch and roll updates. Using a similar approach as in (73), and considering (25), (29), (30), and zero yaw angle (i.e. v 2 2 + v 2 4 = v 2 1 + v 2 3 ), the optimal rotors’ speeds can be given by: positiv e change of pitch angle: ( v 2 = 0 , v 1 = v 3 = 1 √ 2 v max , v 4 = v max , if 0 < t ≤ τ 1 , v 4 = 0 , v 1 = v 3 = 1 √ 2 v max , v 2 = v max , if τ 1 < t ≤ τ 2 , (78) positiv e change of roll angle: ( v 1 = 0 , v 2 = v 4 = 1 √ 2 v max , v 3 = v max , if τ 2 < t ≤ τ 3 , v 3 = 0 , v 2 = v 4 = 1 √ 2 v max , v 1 = v max , if τ 3 < t ≤ τ 4 , (79) Therefore, in the first Stage, the drone changes its orientation such that it can move towards D in presence of external forces (e.g., gravity and wind). In the second Stage, the drone mov es with a maximum acceleration. In Stage 3, the drone’ s orientation changes to minimize the acceleration towards D . In Stage 4, the drone moves with a minimum acceleration. In Stages 5 and 6, the drone’ s orientation and the rotors’ speeds are adjusted to ensure the stability of drone at D . Clearly , the drone will be stable when its total force, A giv en in (67), is zero. Hence, we must have F = | F ext | . Using (25) with T tot = | F ext | , the rotors’ speeds in the stable stage is: v F = s | F ext | 4 ρ 1 . (80) The rotors’ speed in Stages 1-6 are given in (44)-(49). In order to find the switching times, we use the dynamic equations of the drone giv en in (25-29). For instance, in Stage 1, the time needed for a ∆ ψ p , 1 pitch angle change can be obtained using (25) and (29). In this case, giv en the rotors’ speed in (44), and the dynamic equations of the drone, we can find τ 1 and τ 2 as: τ 1 = 1 v max s ∆ ψ p , 1 I y lρ 1 , τ 2 = 2 τ 1 , (81) where ∆ ψ p , 1 is the change of pitch angle at Stage 1. Likewise, τ 3 and τ 4 can also be determined. In Stage 2, the time needed for moving within a d s2 distance is giv en by: t s 2 = r 2 d s 2 A s 2 m D , (82) where A s 2 is the total force tow ards the drone’ s destination at Stage 2 which can be determined using (67). Subsequently , we can find the switching time by τ 5 = τ 4 + t s 2 . The switching times in Stages 3-5 can be determined by adopting the similar approach used in Stages 1 and 2. Note that, τ 14 represents the total control time the drone, which can be determined based on (76) and (81) as follo ws: T I ,D = τ 14 = r 2 d D m D A s 2 − m D A s 4 + T O , (83) where A s 4 is the total force on the drone as Stage 4. T O is the total control time needed for the orientation changes in Stages 1,3, and 5, giv en by: T O = 2 v max h s ∆ ψ p , 1 I y lρ 1 + s ∆ ψ r , 1 I x lρ 1 + s ∆ ψ p , 3 I y lρ 1 + s ∆ ψ r , 3 I x lρ 1 + s ∆ ψ p , 5 I y lρ 1 + s ∆ ψ r , 5 I x lρ 1 i , (84) where ∆ ψ p ,i , ∆ ψ r ,i are the pitch and roll changes in Stage i . This completes the proof. R E F E R E N C E S [1] M. Mozaffari, W . Saad, M. Bennis, Y .-H. Nam, and M. Debbah, “ A tutorial on U A Vs for wireless networks: Applications, challenges, and open problems, ” available online: arxiv .org/abs/1803.00680 , 2018. [2] Q. W u, Y . Zeng, and R. Zhang, “Joint trajectory and communication design for multi-U A V enabled wireless networks, ” IEEE T ransactions on W ir eless Communications , vol. 17, no. 3, pp. 2109–2121, Mar . 2018. [3] M. Alzenad, A. El-Keyi, and H. Y anikomeroglu, “3-D placement of an unmanned aerial vehicle base station for maximum coverage of users with different QoS requirements, ” IEEE W ir eless Communications Letters , vol. 7, no. 1, pp. 38–41, Feb . 2018. [4] M. Mozaffari, W . Saad, M. Bennis, and M. Debbah, “Unmanned aerial vehicle with underlaid device-to-device communications: Performance and tradeoffs, ” IEEE T ransactions on W ir eless Communications , vol. 15, no. 6, pp. 3949–3963, June 2016. [5] Y . Zeng and R. Zhang, “Energy-ef ficient U A V communication with tra- jectory optimization, ” IEEE T ransactions on W ir eless Communications , vol. 16, no. 6, pp. 3747–3760, June 2017. [6] Q. W u, J. Xu, and R. Zhang, “U A V-enabled aerial base station (BS) III/III: Capacity characterization of U A V-enabled two-user broadcast channel, ” available online: arxiv .or g/abs/1801.00443 , 2018. [7] S. Jeong, O. Simeone, and J. Kang, “Mobile edge computing via a UA V- mounted cloudlet: Optimization of bit allocation and path planning, ” IEEE T ransactions on V ehicular T echnology , vol. 67, no. 3, pp. 2049– 2063, Mar. 2018. [8] M. Mozaffari, W . Saad, M. Bennis, and M. Debbah, “Efficient de- ployment of multiple unmanned aerial vehicles for optimal wireless coverage, ” IEEE Communications Letters , vol. 20, no. 8, pp. 1647–1650, Aug. 2016. [9] V . Sharma, R. Sabatini, and S. Ramasamy , “UA Vs assisted delay op- timization in heterogeneous wireless networks, ” IEEE Communications Letters , vol. 20, no. 12, pp. 2526–2529, Dec. 2016. [10] P . G. Sudheesh, M. Mozaf fari, M. Magarini, W . Saad, and P . Muthuchi- dambaranathan, “Sum-rate analysis for high altitude platform (HAP) drones with tethered balloon relay , ” IEEE Communications Letters , vol. 22, no. 6, pp. 1240–1243, June 2018. [11] I. Bor-Y aliniz and H. Y anikomeroglu, “The new frontier in RAN heterogeneity: Multi-tier drone-cells, ” IEEE Communications Magazine , vol. 54, no. 11, pp. 48–55, Nov . 2016. [12] M. Mozaffari, A. T . Z. Kasgari, W . Saad, M. Bennis, and M. Debbah, “Beyond 5G with U A Vs: Foundations of a 3D wireless cellular netw ork, ” available online: arxiv .org/abs/1805.06532 , 2018. [13] M. M. Azari, F . Rosas, K. C. Chen, and S. Pollin, “Joint sum-rate and power gain analysis of an aerial base station, ” in Proc. of IEEE Global Communications Conference (GLOBECOM) W orkshops , W ashington, DC, Dec. 2016. [14] J. L yu, Y . Zeng, R. Zhang, and T . J. Lim, “Placement optimization of UA V-mounted mobile base stations, ” IEEE Communications Letters , vol. 21, no. 3, pp. 604–607, March 2017. [15] M. Mozaff ari, W . Saad, M. Bennis, and M. Debbah, “Wireless com- munication using unmanned aerial vehicles (UA Vs): Optimal transport theory for hover time optimization, ” IEEE T ransactions on W ir eless Communications , vol. 16, no. 12, pp. 8052–8066, Dec. 2017. [16] Y . Zeng, X. Xu, and R. Zhang, “Trajectory optimization for completion time minimization in UA V-enabled multicasting, ” IEEE T ransactions on W ireless Communications, Early access , 2018. [17] J. Garza, M. A. Panduro, A. Reyna, G. Romero, and C. d. Rio, “Design of UA Vs-based 3D antenna arrays for a maximum performance in terms of directivity and SLL, ” International Journal of Antennas and Pr opagation , vol. 2016, Aug. 2016. [18] W . Su, J. D. Matyjas, M. J. Gans, and S. Batalama, “Maximum achiev able capacity in airborne MIMO communications with arbitrary alignments of linear transceiver antenna arrays, ” IEEE T ransactions on W ireless Communications , vol. 12, no. 11, pp. 5584–5593, Nov . 2013. [19] M. N. Soorki, M. Mozaffari, W . Saad, M. H. Manshaei, and H. Saidi, “Resource allocation for machine-to-machine communications with un- manned aerial vehicles, ” in Pr oc. IEEE Globecom W orkshops (GC Wkshps) , W ashington DC, USA, Dec. 2016. [20] J. E. Bobrow , S. Dubowsky , and J. Gibson, “Time-optimal control of robotic manipulators along specified paths, ” The international journal of robotics resear ch , vol. 4, no. 3, pp. 3–17, Sep. 1985. [21] W . S. Newman, “Robust near time-optimal control, ” IEEE T ransactions on Automatic Contr ol , vol. 35, no. 7, pp. 841–844, July 1990. [22] T .-S. Chung and C.-J. W u, “ A computationally efficient numerical al- gorithm for the minimum-time control problem of continuous systems, ” Automatica , vol. 28, no. 4, pp. 841–847, July 1992. [23] L.-C. Lai, C.-C. Y ang, and C.-J. Wu, “Time-optimal control of a hov- ering quad-rotor helicopter, ” Journal of Intelligent & Robotic Systems , vol. 45, no. 2, pp. 115–135, Feb. 2006. [24] J. F . Bonnans and A. Shapiro, “Optimization problems with perturba- tions: A guided tour, ” SIAM revie w , vol. 40, no. 2, pp. 228–264, 1998. [25] L. C. Evans, “ An introduction to mathematical optimal control theory , ” Lectur e Notes, University of California, Department of Mathematics, Berkele y , 2005. [26] D. K. Cheng, “Optimization techniques for antenna arrays, ” Proceedings of the IEEE , vol. 59, no. 12, pp. 1664–1674, Dec. 1971. [27] H. He, S. Zhang, Y . Zeng, and R. Zhang, “Joint altitude and beamwidth optimization for UA V-enabled multiuser communications, ” IEEE Com- munications Letters , vol. 22, no. 2, pp. 344–347, Feb . 2018. [28] K. V enugopal, M. C. V alenti, and R. W . Heath, “Device-to-device millimeter wave communications: Interference, coverage, rate, and finite topologies, ” IEEE Tr ansactions on W ir eless Communications , vol. 15, no. 9, pp. 6175–6188, Sept. 2016. [29] W . L. Stutzman and G. A. Thiele, Antenna theory and design . John W iley & Sons, 2012. [30] Y . Zeng, R. Zhang, and T . J. Lim, “Wireless communications with unmanned aerial vehicles: opportunities and challenges, ” IEEE Com- munications Magazine , vol. 54, no. 5, pp. 36–42, May 2016. [31] S. V aidyanathan and C.-H. Lien, Applications of Sliding Mode Control in Science and Engineering . Springer , 2017, vol. 709. [32] J. E. Hurtado, Kinematic and Kinetic Principles . Lulu. com, 2012. [33] E. L. Lawler and D. E. W ood, “Branch-and-bound methods: A survey , ” Operations resear ch , vol. 14, no. 4, pp. 699–719, 1966. [34] Y . Mutoh and S. Kuribara, “Control of quadrotor unmanned aerial vehi- cles using exact linearization technique with the static state feedback, ” Journal of Automation and Contr ol Engineering , vol. 4, no. 5, pp. 340– 346, Oct. 2016. [35] T . Bajd, M. Mihelj, and M. Munih, “Rotation and orientation, ” in Intr oduction to Robotics . Springer , 2013, pp. 9–36.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment