수면 EEG 이벤트 자동 검출을 위한 딥러닝 통합 프레임워크
본 논문은 수면 중 EEG에서 스핀들, K‑컴플렉스와 같은 마이크로 이벤트를 동시에 탐지하기 위해, 원시 신호를 직접 입력으로 사용하는 컨볼루션 신경망 기반의 엔드‑투‑엔드 모델을 제안한다. 기본적인 객체 검출 아이디어를 차용해 기본 이벤트(디폴트 박스)를 생성하고, 각 박스에 대해 위치·길이 보정과 이벤트 유형 분류를 동시에 수행한다. MASS 데이터셋을 이용한 실험에서 기존 전처리·특징 기반 방법들을 능가하는 정밀도·재현율·F1 점수를 기록…
저자: Stanislas Chambon, Valentin Thorey, Pierrick J. Arnal
본 논문은 수면 중 뇌 활동을 기록하는 EEG에서 스핀들, K‑컴플렉스와 같은 마이크로 이벤트를 자동으로 탐지하기 위한 새로운 딥러닝 기반 프레임워크를 제시한다. 서론에서는 수면 단계와 마이크로 이벤트가 신경학적 질환 진단에 중요한 역할을 함을 강조하고, 기존 자동 검출 방법들이 주파수 대역 기반 필터링, envelope 추출, 혹은 전통적인 머신러닝(예: SVM) 등으로 특정 이벤트에 특화돼 있어 전처리와 파라미터 설정에 높은 의존성을 보이며, 서로 다른 이벤트를 동시에 다루기 어렵다는 문제점을 지적한다.
이에 저자들은 컴퓨터 비전 분야에서 객체 검출을 위해 고안된 SSD와 YOLO와 같은 단일 단계 검출 모델을 EEG 이벤트 탐지에 적용한다. 입력은 C채널 × T시간점 형태의 원시 EEG이며, Block 0에서 2‑D 공간 컨볼루션을 통해 다채널을 가상 채널로 재구성한다(채널 수가 1이면 건너뛰기). 이후 Block k(k=1…8)에서는 1 × 3 커널을 사용해 시간 축 특징을 추출하고, 매 단계마다 2배 다운샘플링하는 최대 풀링을 적용한다. 이렇게 얻어진 고수준 특징 맵은 Block 9‑a와 9‑b로 전달된다. Block 9‑a는 (|L|+1)×ρ개의 1 × 3 컨볼루션을 통해 각 디폴트 이벤트에 대한 클래스 확률을 계산하고, 소프트맥스를 통해 배경(0)과 실제 이벤트(스핀들, K‑컴플렉스 등)의 확률을 얻는다. Block 9‑b는 2×ρ개의 1 × 3 컨볼루션을 사용해 디폴트 이벤트의 중심 시간과 지속 시간에 대한 보정값을 회귀한다.
디폴트 이벤트는 일정 간격(예: 0.5 s)으로 미리 정의된 박스로 생성되며, 각 박스는 실제 라벨과 IoU ≥ η(η=0.5)인 경우 매칭된다. 매칭된 박스는 위치·길이 보정 손실(L1 smooth)과 클래스 손실(교차 엔트로피)을 동시에 학습한다. 매칭되지 않은 박스는 배경 클래스로 라벨링하고, 클래스 불균형을 완화하기 위해 배경 샘플을 1/3 비율로 서브샘플링한다. 전체 손실은 매칭된 샘플과 비매칭된 샘플에 대해 각각 정규화한 뒤 합산한다.
학습은 SGD(learning rate = 1e‑3, momentum = 0)와 배치 크기 32로 진행되며, 100 epoch까지 학습하되 검증 손실이 5 epoch 연속 개선되지 않으면 조기 종료한다. 데이터는 MASS SS2 데이터베이스(19명, 256 Hz)에서 추출했으며, 스핀들 라벨은 두 명의 전문가(E1, E2)가 각각 제공한 550~1100개의 이벤트를 사용한다. K‑컴플렉스 라벨은 E1이 제공한 데이터를 사용한다. 5‑fold 교차 검증을 적용해 10개의 레코드를 훈련, 2개를 검증, 나머지를 테스트에 할당하였다.
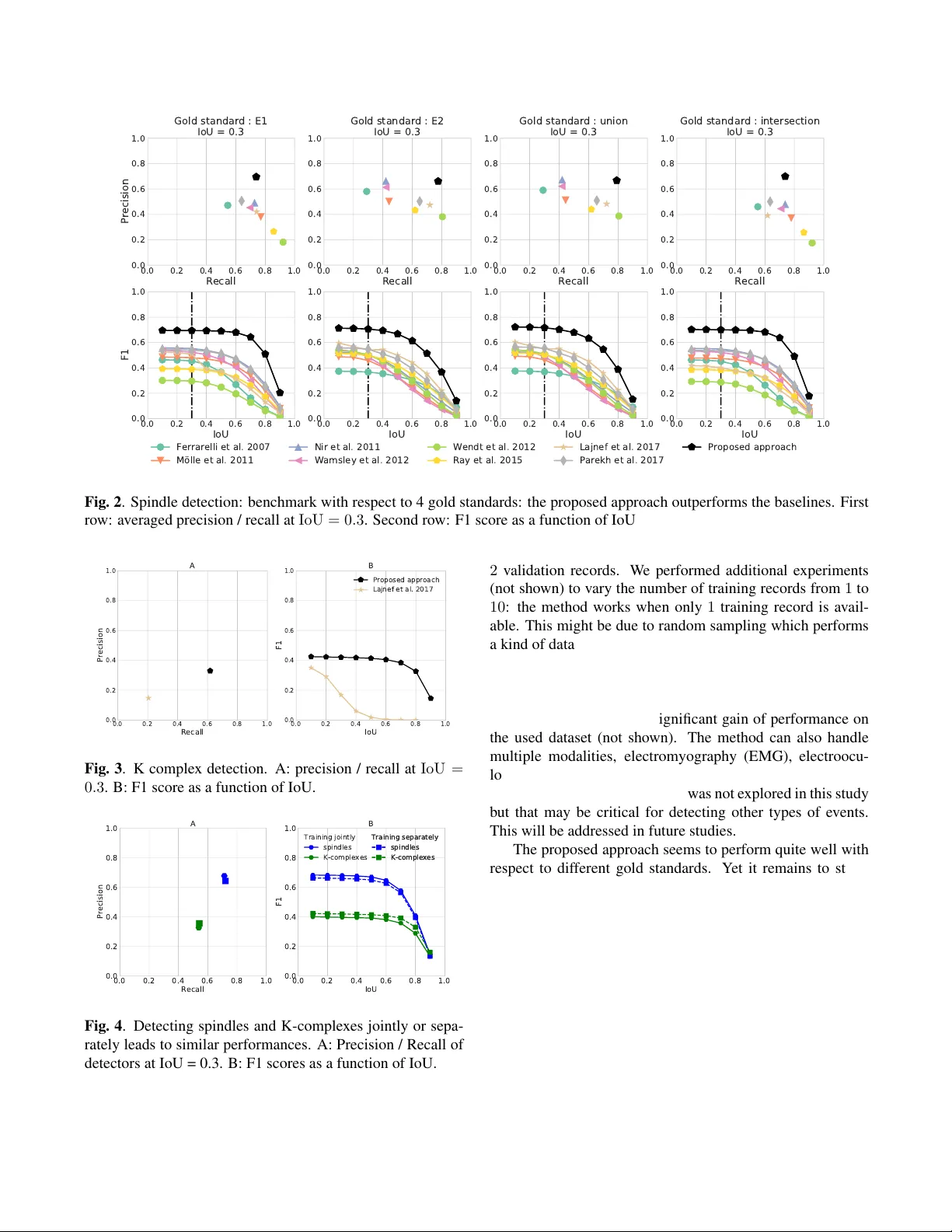
성능 평가는 IoU 임계값 δ에 따라 정밀도·재현율·F1 점수를 계산한다. 스핀들 검출에서는 제안 모델이 IoU = 0.3에서 모든 베이스라인(총 8개)보다 높은 정밀도·재현율을 보였으며, IoU ≥ 0.5에서도 일관된 F1 향상을 기록했다. 특히 두 전문가의 라벨(개별, 교집합, 합집합) 모두에 대해 성능이 크게 변동하지 않아 라벨링 변동성에 강인함을 보여준다. K‑컴플렉스 검출에서도 기존 Lajnef et al., 2017 방법을 능가하는 정밀도·재현율을 달성했다. 공동 스핀들·K‑컴플렉스 검출 실험에서도 제안 모델이 전반적으로 우수한 결과를 보였다.
논문의 주요 기여는 (1) 원시 EEG 신호만으로 특징을 학습해 전처리 단계와 파라미터 튜닝 부담을 크게 감소시킨 점, (2) 다중 이벤트 유형을 하나의 네트워크에서 동시에 탐지함으로써 라벨링 비용과 모델 관리 복잡성을 낮춘 점이다. 한계점으로는 현재 단일 채널(C3)만 사용했으며, 다채널 정보를 충분히 활용하지 못했다는 점, 디폴트 이벤트의 길이와 겹침 비율을 고정함으로써 매우 짧거나 긴 이벤트에 대한 유연성이 부족할 수 있다는 점을 들 수 있다. 향후 연구에서는 다채널 융합, 가변 길이 디폴트 박스 설계, 경량화 및 실시간 적용 가능성 탐색, 그리고 다른 수면 단계와 병행한 멀티모달 학습이 기대된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기