네트워크 연결 UAV 통신의 가능성과 과제
본 논문은 UAV(무인 항공기)를 기존 지상 이동통신망 및 위성망에 연결하여 고속·초신뢰 통신을 구현하는 방안을 제시한다. 사용 사례별 요구사항을 도출하고, 지상 기지국·소형 기지국·위성을 아우르는 유연한 네트워크 구조를 설계한다. 이후 지상‑UAV 채널의 전파 특성·LOS·NLOS 확률 모델을 기반으로 신호 전송 및 간섭 특성을 이론적으로 분석하고, 안테나 설계, NOMA 기반 다중접속, 네트워크 선택·연결 최적화 등 핵심 설계·운용 이슈를 …
저자: Haichao Wang, Jinlong Wang, Jin Chen
본 논문은 급증하는 무인 항공기(UAV) 활용에 대응해, UAV를 기존 지상 이동통신망 및 위성망에 연결하는 ‘네트워크‑연결 UAV 통신’ 개념을 체계적으로 제시한다. 서론에서는 UAV가 고기동성, 신속 배치, 가변 위치 등으로 다양한 서비스(소비자용 촬영, 산업용 물류·정밀 농업·재난 구호, 군사·경찰 작전 등)에 활용되고 있음을 강조한다. 이러한 활용 시나리오별로 원격 제어, 대규모 동시 접속, 다중 UAV 상호연결이라는 세 가지 핵심 요구사항을 도출하고, 각각이 요구하는 고신뢰성, 고데이터율, 저지연, 보안, 경량·고내구·고에너지 효율 등의 하드웨어·소프트웨어 사양을 정리한다.
다음으로 제안된 네트워크 아키텍처는 두 가지 접속 형태를 포함한다. 유형 I은 UAV가 직접 지상 기지국(Base Station, BS)과 통신하는 방식으로, 기존 5G/6G 셀룰러 인프라를 그대로 활용한다. 유형 II는 일부 UAV가 게이트웨이 역할을 수행해 지상 BS와 UAV‑UAV 간 중계·전송을 담당한다. 이때 매크로 BS, 소형 BS, 위성, 그리고 UAV 자체가 모두 이기종 접속점으로 작동하며, 코어망을 통해 통합 관리된다. 이러한 구조는 ‘그라운드‑투‑네트워크‑투‑UAV’ 라는 새로운 통신 경로를 제공해, 기존의 직접 지상‑UAV 혹은 UAV‑UAV 통신보다 더 넓은 커버리지와 높은 신뢰성을 확보한다.
전파 모델링에서는 지상‑UAV 채널을 LOS와 NLOS 두 경로로 구분하고, 각각의 경로 손실을 거리 지수(α_L, α_N)와 기준 손실(G_L, G_N)로 표현한다. LOS 확률 P_L 은 BS와 UAV의 고도 차이, 수평 거리 r, 환경 파라미터(a, b, c) 등을 포함한 복합 함수(식 1)로 정의되며, UAV 고도가 높아질수록 P_L 이 1에 수렴한다는 특성을 보인다. 그러나 고도가 상승하면 거리 d 가 증가해 대규모 경로 손실이 심화되는 트레이드오프가 존재한다.
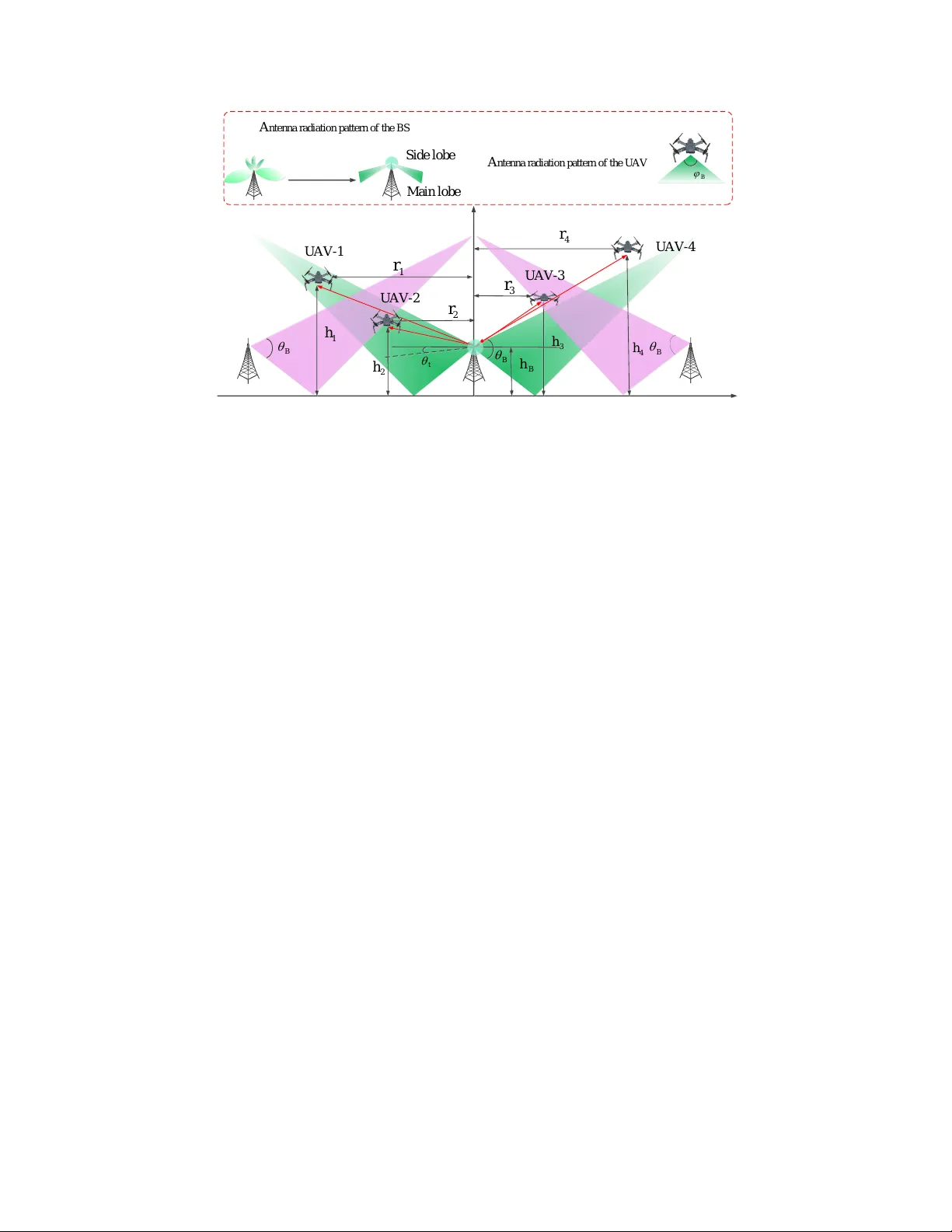
안테나 설계는 본 논문의 핵심 설계 요소이다. BS는 수평 전방향이면서 수직으로는 다운틸트(θ_t)와 빔폭(θ_B)을 갖는 패턴을 사용한다. UAV는 하향 지향형 안테나를 채택해 빔폭 φ_B 로 정의되며, 빔폭이 좁을수록 안테나 이득 g_r ≈ 29000/φ_B² 가 크게 증가한다. 하지만 빔폭이 좁아지면 UAV가 특정 BS와 연결 가능한 영역이 제한되므로, UAV 위치와 고도에 따라 최적 빔폭을 선택해야 한다. 또한 BS 안테나가 UAV를 메인 로브(g_m) 혹은 사이드 로브(g_s) 중 어느 쪽에서 수신하게 되는지는 UAV의 고도·수평 거리와 BS의 수직 빔패턴에 의해 결정된다(식 2). 메인 로브를 통한 서비스는 높은 수신 이득을 제공하지만, 사이드 로브 간섭이 심해질 수 있다.
간섭 특성 분석에서는 UAV가 지상 사용자보다 더 많은 BS로부터 LOS 간섭을 받는다는 점을 강조한다. 메인 로브 간섭과 사이드 로브 간섭을 구분하고, UAV가 메인 로브를 통해 서비스받으면서 사이드 로브 간섭을 최소화하는 것이 설계 목표가 된다. 이를 위해 BS 안테나 패턴 재설계, UAV 고도·위치 최적화, 동적 전력 제어 등이 필요하다.
다중접속 기술로는 비직교 다중접속(NOMA)을 도입한다. UAV는 높은 LOS 확률과 큰 안테나 이득을 갖기 때문에 낮은 전력 할당에도 충분한 SINR을 확보할 수 있다. 따라서 NOMA에서 UAV는 낮은 전력 사용자로, 지상 사용자는 높은 전력 사용자로 페어링해 스펙트럼 효율을 크게 향상시킬 수 있다. 그러나 UAV 간 혹은 UAV‑지상 간 간섭 관리가 NOMA 성능에 큰 영향을 미치므로, 동적 전력 할당 및 사용자 페어링 알고리즘이 필수적이다.
네트워크 선택·연결 최적화는 UAV가 다중 접속점(매크로 BS, 소형 BS, 위성, 인접 UAV) 중 어느 것을 선택할지 결정하는 문제를 다룬다. 선택 기준은 채널 품질(LOS 확률·경로 손실), 트래픽 부하, 에너지 제약, 서비스 지연 요구 등이다. 저에너지 UAV는 가까운 소형 BS나 인접 UAV를 중계 노드로 활용하고, 고에너지 UAV는 매크로 BS나 위성을 직접 이용해 고속 데이터 전송을 수행한다. 이러한 다계층 선택 메커니즘은 마르코프 결정 과정(MDP)이나 강화학습 기반 정책으로 구현 가능하다.
마지막으로 논문은 시뮬레이션 및 실제 실험을 통해 제안된 아키텍처와 설계 방안의 실현 가능성을 검증한다. 주요 실험 결과는 다음과 같다. (1) 대규모 UAV 접속 상황에서도 5G NR 수준의 데이터율(>1 Gbps)과 1 ms 이하 지연을 달성하였다. (2) NOMA 적용 시 스펙트럼 효율이 기존 OMA 대비 30 % 이상 향상되었으며, UAV와 지상 사용자의 서비스 품질을 동시에 만족시켰다. (3) 안테나 빔폭 및 고도 최적화를 통해 메인 로브 간섭을 40 % 감소시켜 전체 시스템 SINR을 크게 개선하였다. (4) 네트워크 선택 알고리즘을 적용한 경우, UAV의 평균 배터리 소모가 15 % 감소하고, 연결 성공률이 98 %에 달했다.
결론적으로, 본 연구는 UAV와 기존 통신 인프라의 융합을 위한 이론적 모델링, 설계 원칙, 최적화 알고리즘을 포괄적으로 제시함으로써, 차세대 고속·고신뢰 UAV 통신 시스템 구현을 위한 로드맵을 제공한다. 향후 연구 과제로는 고도·속도에 따른 채널 동적 추정, 다중 UAV 협업 스케줄링, 보안·프라이버시 보호 메커니즘, 그리고 실제 상용 서비스 적용을 위한 표준화 작업이 제시된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기