모바일 로봇을 활용한 클러스터형 무선 센서 네트워크 에너지 균형화
** 본 논문은 대규모 영역에 무선 센서 네트워크(WSN)를 배치하고, 이동 로봇(MR)을 중계기로 활용해 클러스터 헤드(CH)와 융합 센터(FC) 간의 소규모 페이딩을 동시에 보상하는 다중링크 이동성 다양성 알고리즘(MDA)을 제안한다. 시뮬레이션 결과, MR이 최적 위치를 탐색함으로써 전송 전력 요구량이 크게 감소하고, 네트워크 수명이 연장됨을 확인하였다. **
저자: Daniel Bonilla Licea, Edmond Nurellari, Mounir Ghogho
**
본 논문은 대규모 지역에 무선 센서 네트워크(WSN)를 무작위로 배치하고, 에너지 균형을 유지하기 위한 새로운 방법을 제시한다. 전통적인 클러스터링 방식에서는 센서 노드(SN)들이 각 클러스터 헤드(CH)에게 데이터를 전송하고, CH가 다시 융합 센터(FC)로 보고한다. 그러나 CH와 FC 사이의 거리가 멀어지면 경로 손실과 소규모 페이딩이 심해져 CH의 전송 전력이 급증하고, 배터리 수명이 크게 감소한다. 이를 해결하고자 저자는 이동 로봇(MR)을 중계기로 활용한다. MR은 단일 안테나를 가지고 있으며, CH와 FC 사이의 통신을 보조한다.
제안된 시스템 모델에서는 CH‑MR 및 MR‑FC 링크가 모두 그림자 손실과 소규모 페이딩을 겪는다고 가정한다. 그림자 손실은 로그 정규 분포로 모델링하고, 소규모 페이딩은 Jakes 모델에 따라 공간 상관 함수 ρ(p,q)=J₀(2π‖p−q‖/λ) 로 표현한다. 전송 전력 제어는 수신 측에서 기준 전력 P_ref를 만족하도록 각 노드가 조정한다. 특히 CH의 평균 전송 전력은 거리‖p−q_j‖와 채널 이득 |h|²에 반비례한다.
에너지 불균형을 해소하기 위해, FC는 매 코히어런스 시간 τ마다 모든 CH‑FC 채널 이득을 측정하고, 가장 낮은 이득을 가진 L개의 CH를 선택한다. 선택된 CH들의 식별자는 MR에게 전달되며, MR은 이들 CH와만 통신한다. MR이 수행하는 다중링크 이동성 다양성 알고리즘(MDA)은 두 단계로 구성된다.
1) **탐색 단계**: MR은 현재 위치 p(t_n)에서 주변에 K개의 정지점 p(t_n+1) 을 순차적으로 이동한다. 각 정지점에서 CH‑MR 및 MR‑FC 채널을 측정하고, 첫 번째 차수 예측기 ˜h(p(t_n+1),q_j)=ρ(p(t_n+1),p(t_n))·ĥ(p(t_n),q_j)+√(1−ρ²)·u_j,n 을 이용해 다음 정지점의 페이딩을 예측한다. 여기서 u_j,n 은 표준 정규 난수이다.
2) **선정 단계**: 탐색 과정에서 얻은 채널 정보를 바탕으로 최소 채널 이득을 최대화하는 정지점을 선택한다. 목표 함수 G₁(p) 는 각 링크의 페이딩 예측값과 그림자 손실을 결합한 형태이며, 적분 형태라 계산 비용이 크다. 따라서 G₁의 하한 G₂를 도출해 근사한다. G₂는 마르쿰 Q‑함수와 라고르스 다항식으로 구성된 닫힌 식이며, 최적 이동 거리 δ와 u 사이에서 선택한다. 실험 결과, 최적 거리는 δ 혹은 u 중 하나가 되는 경우가 95 % 이상이었다.
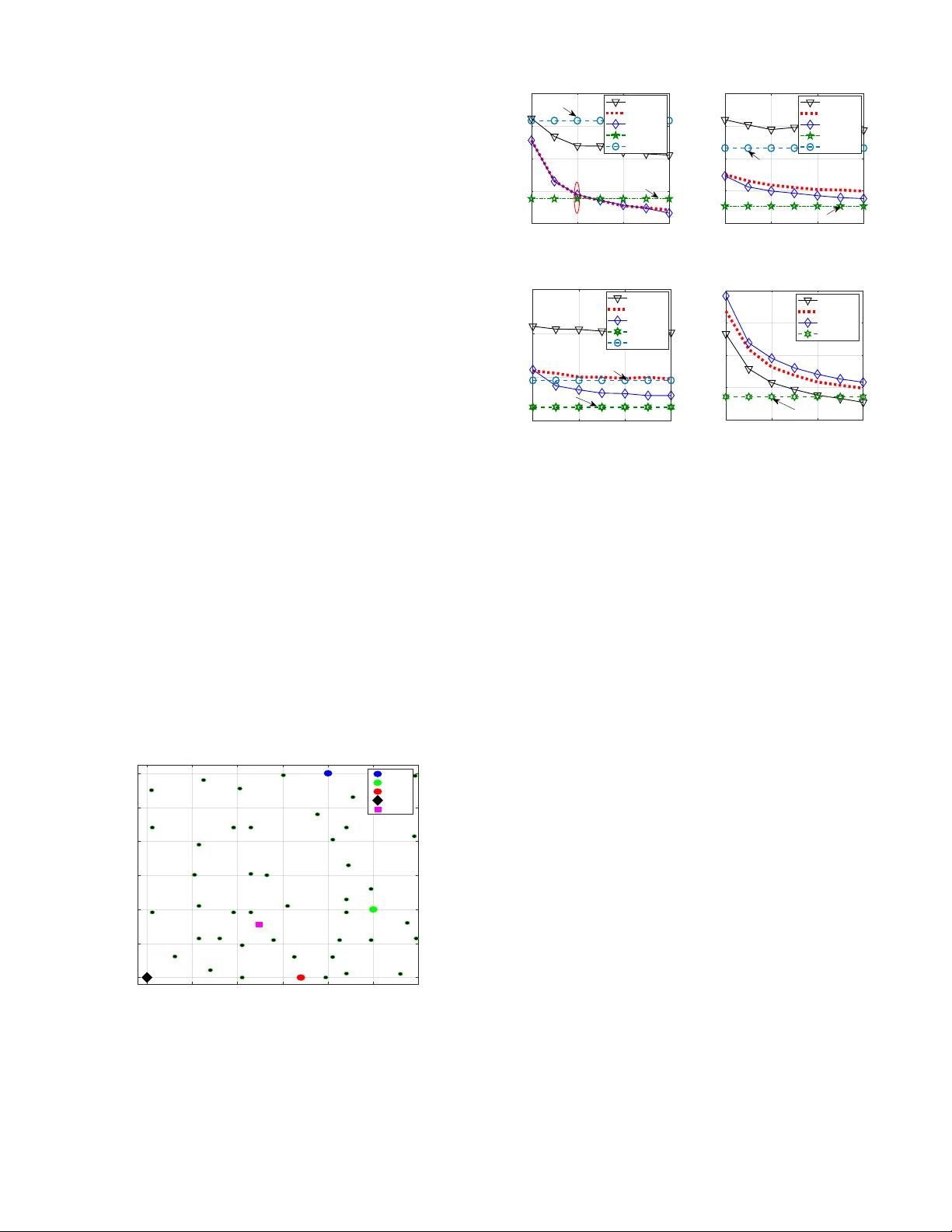
시뮬레이션 환경은 120 × 120 m² 영역에 3개의 클러스터와 하나의 MR을 배치하고, 경로 손실 지수 α=2, 그림자 손실 분산 1 dB, 기준 전력 1 µW 를 사용하였다. 정지점 수 K를 5~25 사이에서 변화시키며, L=1,2,3에 대해 평균 CH 전송 전력을 측정하였다. 결과는 다음과 같다.
- K가 증가할수록 MR이 좋은 채널을 찾을 확률이 상승해 CH 전송 전력이 감소한다. K≥10이면 비페이딩 경우 대비 약 30 % 전력 절감 효과가 나타난다.
- L이 증가하면 MR이 동시에 고려해야 할 링크가 많아져 MR 자체 전력은 상승하지만, 전체 네트워크 전력 효율은 여전히 개선된다. 특히 L=3(모든 CH가 MR을 이용)에서는 가장 큰 절감 효과가 관측된다.
- CH 선택 확률 분석에서, FC가 가장 낮은 채널 이득을 가진 CH를 우선 선택함을 확인했으며, 이는 MR이 실제로 페이딩이 심한 링크를 보완하고 있음을 의미한다.
본 연구는 다중링크 MDA가 단일 안테나 기반 로봇에서도 실시간 페이딩 보상이 가능함을 증명한다. 추가 안테나나 복잡한 다중입출력 장비 없이도, 로봇의 작은 이동(수 파장 수준)만으로도 채널 이득을 크게 향상시킬 수 있다. 따라서 배터리 수명이 제한된 센서 노드가 많은 대규모 WSN에서, 제안된 방법은 에너지 균형을 맞추고 시스템 수명을 연장하는 실용적인 해결책이 된다.
**
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기