Energy balancing for robotic aided clustered wireless sensor networks using mobility diversity algorithms
We consider the problem of energy balancing in a clustered wireless sensor network (WSN) deployed randomly in a large field and aided by a mobile robot (MR). The sensor nodes (SNs) are tasked to monitor a region of interest (ROI) and report their tes…
Authors: Daniel Bonilla Licea, Edmond Nurellari, Mounir Ghogho
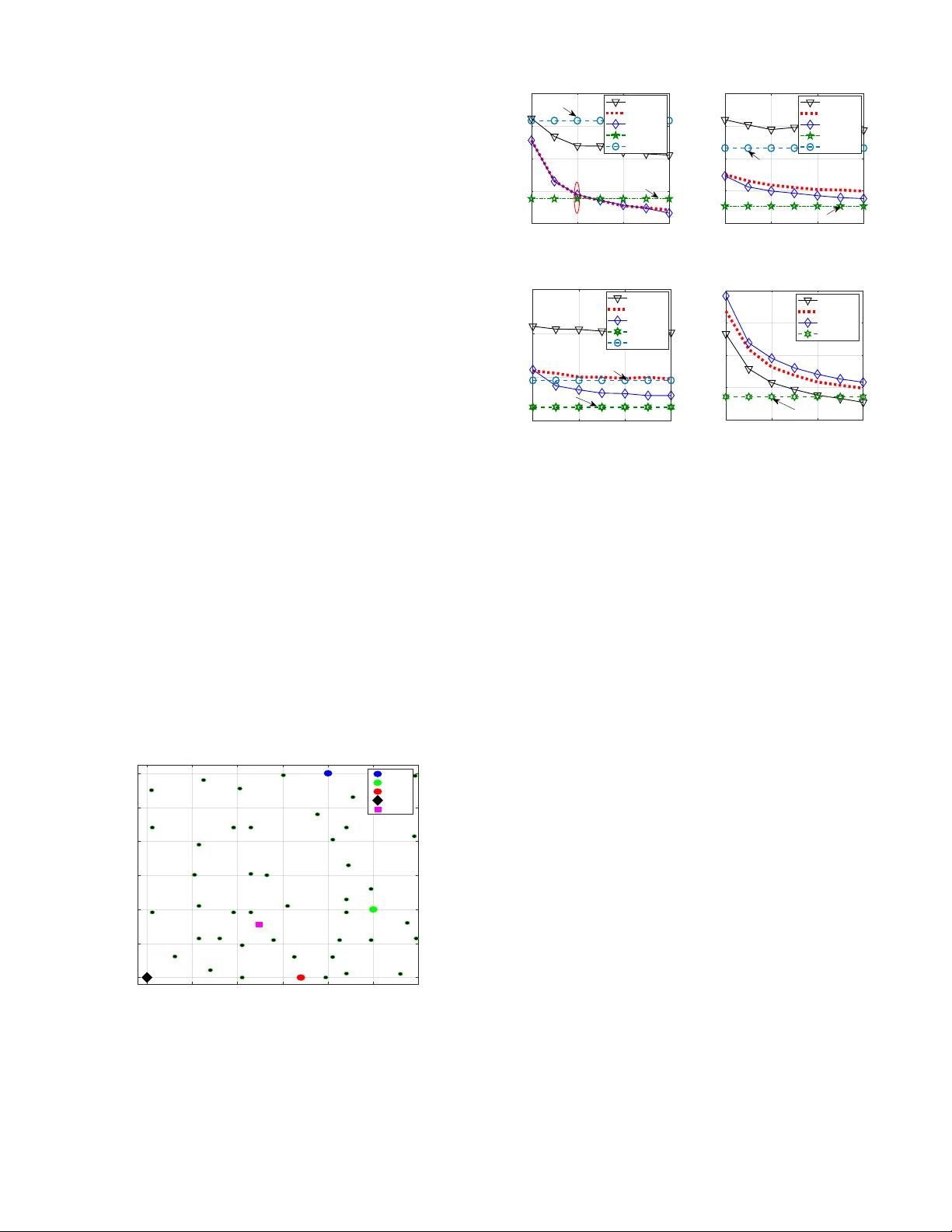
Ener gy Balancing for Robotic Aided Clustered W ireless Sensor Networks Using Mobility Di versity Algorithms Daniel Bonilla Licea ∗ , Edmond Nurellari † , and Mounir Ghogho ∗ , ‡ ∗ International Univ ersity of Rabat, FIL, TICLab, Morocco † School of Engineering, Uni versity of Lincoln, UK ‡ School of Electronic and Electrical Engineering, Uni versity of Leeds, UK daniel.bonilla-licea@uir .ac.ma, enurellari@lincoln.ac.uk, m.ghogho@ieee.or g Abstract —W e consider the problem of energy balancing in a clustered wir eless sensor network (WSN) deployed randomly in a large field and aided by a mobile robot (MR). The sensor nodes (SNs) are tasked with monitoring a r egion of interest (R OI) and reporting their test statistics to the cluster heads (CHs), which they subsequently report to the fusion center (FC) over a wireless fading channel. T o maximize the lifetime of the WSN, the MR is deployed to act as an adaptive relay between a subset of the CHs and the FC. T o achieve this we develop a multipl e − link mobility diversity algorithm (MD A) executed by the MR that will allow to compensate simultaneously for the small-scale fading at the established wireless links (i.e., the MR-to-FC as well as various CH-to-MR communication links). Simulation results show that the proposed MR aided technique is able to significantly reduce the transmission power requir ed and thus extend the operational lifetime of the WSN. W e also show how the effect of small-scale fading at various wireless links is mitigated by using the proposed multipl e − link MD A executed by a MR equipped with a single antenna. Index T erms —Wireless sensor network, cluster , mobile robot, fading, mobility diversity I . I N T RO D U C T I O N Monitoring a region of interest (ROI) is one of the most important applications of wireless sensor networks (WSNs) [1], [2]. Multiple low-cost sensor nodes (SNs) are often spatially deployed over a large R OI to observe different events and estimate parameters of interest. In general, the SNs process the local observations and report back to a fusion center (FC) that optimally combines the individual reports to reach a global decision. Being geographically dispersed to cover large areas, the SNs are constrained in both bandwidth and po wer . T o allo w a low − l atency WSN when the R OI is very large, the WSN is divided into multiple clusters to manage the large number of SNs needed to provide reliable coverage (e.g., see Fig. 2). Each cluster head (CH) receiv es data from each SN within the cluster , which subsequently reports to the FC where the ultimate decision is taken. The framework of centralized decision for a single FC (i.e., single CH) network configuration has been extensi vely studied in [3]–[6], to name but a few references. There are some recent publications [7], [8] (in the context of estimation) and [9] (in the context of detection) that considered the effect of inter − sensor collaboration on the WSN performance; after the collaboration stage, the SNs (which in general can be a subset of all SNs) report to a FC where the final decision is made. While the authors in [7] claim to reduce the FC control ov erhead, [8] deriv es the optimum power allocation scheme for a gi ven maximum total network power budget in order to improv e the estimation quality . Now , clustered WSNs [10] has been extensi vely studied in v arious contexts such as energy management [11], [12] and fusion rules design [13]. In the context of clustering algorithms, the authors in [14] propose a d − hop cluster partitioning to deal with the load imbalance among CHs. In this paper , we adopt the network configuration in [5], i.e., we consider equal-sized clusters of SNs (e.g., [15]) that report their information on a regular basis to a FC. For the CHs that are too far from the FC and when communication link between the CH and the FC is poor , a mobile robot (MR) is deployed to act as an adaptiv e relay . W e propose a mul tipl e − link MDA to extend the operational lifetime of the WSN and to deal with the imbalanced load among the CHs. During the execution of the mul tiple − l ink MD A the MR will mov e small distances (on the order of one wav elength). The transmission (CHs-to- MR as well as MR-to-FC) links are assumed to experience shadowing and multipath fading. W e show that the proposed MD A effecti vely deals with the energy imbalance in a cluster WSN. I I . S Y S T E M M O D E L Consider the problem of monitoring a large R OI by a WSN consisting of a FC, M spatially distrib uted SNs that are networked in N equal-sized clusters and a MR; all equipped with a single antenna. The wireless channels CHs- to-MR and the channel MR-to-FC are assumed to experience shadowing as well as small scale fading 1 . Since most of the WSNs are bandwidth constrained, we assume narrow 1 The small scale fading is assumed to be time-variant with a coherence time τ . band communications so that the communication channels can be modeled as non-frequency selectiv e. The case where the spatially distributed CHs report to the FC via a dedicated parallel access channel (P AC) is in vestigated in e.g., [12], [13]. Here, we propose to deploy a single MR to act as an adapti ve relay for forwarding the test statistics from the CHs to the FC. So, at the MR (positioned at point p ( t ) ), the test statistic receiv ed from the j th CH at time t is: ˆ T j ( t ) = s ( p ( t ) , q j ) h ( p ( t ) , q j , t ) k p ( t ) − q j k α/ 2 2 ! T j ( t ) + n ( t ) (1) where q j is the position of the j th CH, s ( p ( t ) , q j ) represents the shadowing which is modeled by a lognormal random variable whose normalized spatial correlation function is expo- nential, T j ( t ) is the test statistic transmitted from the j th CH, and n ( t ) ∼ N (0 , σ i 2 )) ; h ( p , q j , t ) represents the small scale fading assumed to follow Jakes’ model, i.e., its normalized spatial correlation is: ρ ( p , q ) = E [ h ( o , p , t ) h ∗ ( o , q , t )] = J 0 2 π k p − q k λ (2) where o , p , q ∈ R 2 are arbitrary points in the space; J 0 ( · ) is the Bessel function of first order and zeroth degree while λ is the wav elength of the carrier used for the transmission. In addition, the small-scale fading is assumed to remain constant ov er the coherence time τ (i.e., h ( p , q j , t ) = h k ( p , q j ) and for t ∈ [ k τ , ( k + 1) τ ) ), h k 1 ( p , q j ) and h k 2 ( p , q j ) are assumed statistically independent for k 1 6 = k 2 . Now , without loss of generality , we assume that the distance between the CHs is significantly larger compared to λ and so, for j 6 = i , h k ( p , q j ) and h k ( p , q i ) are considered to be statistically independent. For notational conv enience we denote the position of the FC as q 0 . Finally , to satisfy a certain average reference power P ref at the recei ver , the CHs and the MR use transmit po wer control mechanism. At the j th CH, the av erage transmit power is: P j = k p ( t ) − q j k α 2 P ref s 2 j ( p ( t ) , q j ) | h k ( p ( t ) , q j ) | 2 (3) where t ∈ [ k τ , ( k + 1) τ ) , and α is the path loss coefficient. I I I . P RO P O S E D S O L U T I O N T o extend the operational lifetime of the WSN and to deal with the imbalanced load among the CHs, we propose a double − l ink mobility di versity algorithm and deri ve a MR path planner that we describe next in Section III-B. W e assume that the FC, at time instant t = k τ , has full kno wledge of the channel gains ( h ( q 0 , q j ) , ∀ j = 1 , 2 , . . . , N ) from CHs to FC. Based on this information, the FC determines the L CHs with the lowest (CH-to-FC) channel gain and forward the corresponding CHs’ identities to the MR. Then, the MR will act as a decode and forward relay that will establish communication links only with these L (FC selected) CHs. Nev ertheless, due to small-scale fading, these communication CLUSTER 1 SN1 SN2 SN3 SN4 SN5 CH1 CLUSTER 2 SN6 SN7 SN8 SN9 CH2 CLUSTER 3 SN10 SN11 SN12 CH3 1 FUSION CENTER R OBOT Fig. 1. Schematic communication architecture among peripheral CHs, MR, and FC. The i th CH generates a test statistic ( T i ) by combining the observations received from the SNs within the cluster . The CH can communicate with the FC directly or via the MR. links may significantly reduce the communication quality and ev entually a larger amount of CH transmit power may be required to satisfy the reference power at the recei ver (3). Since the CH nodes are battery operated, optimizing their transmit power is of a particular importance in extending the WSN operational lifetime. W e note that after a duration τ , the wireless communication links may change due to the temporal dependence of the small-scale fading term. As a result, the FC is required to continuously estimate the set of L CHs with the lowest CHs-to-FC channel gains and forward the corresponding CHs identities to the MR. Before introducing the proposed algorithm, we next briefly describe few existing fading compensation techniques. A. Related Compensating T echniques Few existing techniques deal with the fading channel com- pensation in practice. A widely used technique is the multi- antenna diversity . In the context of WSNs, clearly this tech- nique requires multiple antennae transcei vers mounted on each of the CH node. This not only increases the cost of the node but also in many practical scenarios, may not be ev en feasible due to both the node size limitations and transmit power constraint. Hence, single antenna transceivers are desired in practice. Now , since the small-scale fading term is time varying, temporal diversity technique could be used. But because this work consider the scenarios where the coherence time is significantly greater than the symbol duration, the temporal div ersity is not suitable as it would introduce a large delay . In this case, the MD As [16] are suitable techniques to compensate the small-scale fading in WSNs. B. Multiple Link Mobility Diversity Algorithm MD As are a new type of diversity technique that exploit the spatial v ariations of the small-scale fading and the mobility of the MRs. Their operation is divided in two phases [16], [17]: (i) exploration phase; and (ii) selection phase. During the exploration phase, the MR explores a series of K stopping points located in its vicinity (from where it estimates the channel gain) that are optimized based on a path planner . After the exploration phase, the MR uses a selection rule to decide on the optimum position for establishing a communication link. The existing MD As (e.g., [16]) are only applicable to the compensation of a single small-scale fading channel. Here, we require a simultaneously small-scale fading compensation technique of L + 1 communication links (i.e., the L MR-to- CHs as well as the MR-to-FC links). Therefore, in this paper we extend our pre vious work in [16], [17] and dev elop a multipl e − l ink MD A. T o the best of our kno wledge, this is the first time that a multipl e − l ink MDA is proposed. Next, we dev elop the path planner that determines the location of the stopping points during the exploration phase and the MD A selection rule used during the selection phase. 1) MDA development: In the context of MD As (as previ- ously stated), the set of distances among all stopping points are small (see [16]). As a result, the shadowing term of the j th CH-to-MR link at time t is assumed to be constant, i.e., s ( p ( t ) , q j ) ≈ s j , ∀ j = 1 , 2 , . . . , N . Also, due to the fact the that distances between stopping points in MD As are small then the distance tra velled by the MR, while ex ecuting a n MDA, is on the order of a fe w wa velengths λ and so it is much smaller than MR-to-FC and MR-to-CH distances. Therefore k p ( t ) − q j k 2 ≈ d j for all t . In this paper , we dev elop a path planner with memory that uses channel gain measurements both at the current and previous MR’ s positions in order to estimate the MR’ s next position. This path planner requires small-scale fading predictors such as the one used in [16]. Here, for simplicity , we choose the first order predictor 2 . Howe ver , using the results presented here, the dev elopment of MD A with higher memory order predictors can be easily established. The small-scale fading predictor at time instant t n +1 giv en the estimate ˆ h ( p ( t n ) , q j ) is [16]: ˜ h ( p ( t n +1 ) , q j ) = ρ ( p ( t n +1 ) , p ( t n )) ˆ h ( p ( t n ) , q j ) (4) + p 1 − ρ 2 ( p ( t n +1 ) , p ( t n )) u j,n where t n +1 − t n τ ; ˆ h ( p ( t n ) , q j ) is the estimate of h ( p ( t n ) , q j ) , ρ ( · ) as in (2), and u j,n is a set of Normal independent and identically distributed random variables for 0 ≤ j ≤ L , 1 ≤ n ≤ K . T o develop the path planner for the mul tiple − l ink MD A, the MR position at time instant t n +1 (i.e., p ( t n +1 ) ), is chosen such that the minimum channel gain is maximized over L + 1 2 This predictor considers only the measurements of the channel at the current MR’s position to predict the small-scale fading term at the next position. links. So, our optimisation problem is: maximize ` n ∈ [ ` d ,` u ] G 1 ( p ( t n +1 )) s . t . p ( t n +1 ) = p ( t n ) + ` n [cos( φ n ) sin( φ n )] T (5) where G 1 ( p ( t n +1 )) = E min j =0 , 1 , ··· ,L s j ˜ h ( p ( t n +1 ) , q j ) d α/ 2 j (6) and ` n is the distance trav elled by the MR between the current and the next position, φ n represents the MR movement direction, and finally E [ · ] denotes the expected value with respect to the random variables set { u j,n } ∀ j . W e would like to make it clear that ` d is a design parameter and that 0 < ` d < ` u . Here, ` u is the smallest distance ` such that J 0 (2 π `/λ ) = 0 (i.e., the smallest distance such that the small- scale fading terms in (4) are independent). Defining ` n as abov e yields a normalized correlation f actor ρ ( p ( t n +1 ) , p ( t n )) defined ov er the interval [0 , 1) . W e remind the reader that in (6), q 0 , denotes the FC location. Since the predictor (4) is a complex Gaussian random variable then it can be easily shown that: G 1 ( p ( t n +1 )) = Z ∞ 0 Π L j =0 Q 1 ν j σ j , x σ j d x (7) where Q 1 ( · , · ) is the Marcum Q function with σ j = s j p 1 − ρ 2 ( p ( t n +1 ) , p ( t n )) d α/ 2 j (8) ν j = s j ρ ( p ( t n +1 ) , p ( t n )) | ˆ h ( p ( t n ) , q j ) | d α/ 2 j . (9) Solving the optimisation problem (5) is computationally ex- pensiv e in general 3 . Therefore we dev elop an alternativ e optimization problem which is similar but much simpler to solve. T o do this, we first note that each multiplicati ve term in (7) is a monotonically decreasing function that tends to zero. Then, there exists a value X 0 such that: Z ∞ 0 Π L j =0 Q 1 ν j σ j , x σ j d x ≈ Z X 0 0 Π L j =0 Q 1 ν j σ j , x σ j d x (10) Using Chebyshev’ s inequality: R X 0 0 Π L j =0 Q 1 ν j σ j , x σ j d x X 0 ≥ Π L j =0 Z X 0 0 Q 1 ν j σ j , x σ j d x X L 0 = 1 X L 0 G 2 ( p ( t n +1 )) (11) with: G 2 ( p ( t n +1 )) , Π L j =0 ( σ j r π 2 L 1 / 2 − ν 2 j 2 σ 2 j !) (12) 3 The integral in (7) needs to be calculated numerically since it can not be ev aluated analytically . This not only incur delays into the MDA algorithm but also require more processing power from the MR. where L 1 / 2 ( · ) is Laguerre’ s polynomial of degree 1 / 2 . Then we obtain the alternativ e optimization problem by replacing in (5) the optimization tar get G 1 ( p ( t n +1 )) by its lower bound G 2 ( p ( t n +1 )) : maximize ` n ∈ [ ` d ,` u ] G 2 ( p ( t n +1 )) s . t . p ( t n +1 ) = p ( t n ) + ` n [cos( φ n ) sin( φ n )] T (13) where G 2 ( p ( t n +1 )) is defined in (12), ` n is defined over the interval [ ` d , ` u ] and determines the correlation between the small-scale fading terms (see (2)). From the extensi ve numerical results, we have observed that the optimisation problem (13) yields an optimum value ` o n either equal to ` d or ` u with a very high probability . Hence, to further simplify the optimization process and to reduce the MR processing b urden, (13) is solved only for ` n ∈ { ` d , ` u } . It is worth noting that the optimisation is performed at time instant t n by making use of the observed communication channel measurements at MR position ( p ( t n )) . Clearly , solving the optimisation problem (13) will yield a set of stopping points with good wireless channel properties. Now , the final step is to decide how to determine, among those stopping points, the optimum MR position such that the ov erall WSN performance is improv ed. In this paper, to achiev e this the MR will select this optimum stopping point as the one that maximizes the minimum channel gain (i.e., incorporating all the MR-to-CH and the MR-to-FC links). I V . S I M U L A T I O N S W e ev aluate numerically the performance of our proposed multipl e − l ink MD A. W e simulate a WSN deployed in a 120 × 120 ROI and M SNs di vided into N = 3 clusters with arbitrary SN geometry , where the distances between the MR and CHs are assumed to be known. The spatial config- uration is shown in Fig. 2. W e let the pathloss coef ficient 0 20 40 60 80 100 120 x 0 20 40 60 80 100 120 y CH1 CH2 CH3 FC MR Fig. 2. Spatial configuration of the WSN where the SNs are represented with green. α = 2 , the v ariance of s j ( p , q j ) in (3) is taken such that V ar { 10 log 10 ( s j ( · )) } = 1 dB, ∀ j and the reference power P ref = 1 µ W . Finally , we note that both G 1 ( p ( t n +1 )) and 2 4 6 8 Number of stopping points, K 5 10 15 20 25 Transmission power (mW) L=1 L=2 L=3 Non-fading Non-fading 2 4 6 8 Number of stopping points, K 0 5 10 15 20 Transmission power (mW) L=1 L=2 L=3 Non-fading Non-fading 2 4 6 8 Number of stopping points, K 0 5 10 15 Transmission power (mW) L=1 L=2 L=3 Non-fading Non-fading 2 4 6 8 Number of stopping points, K 2 4 6 8 10 Transmission power (mW) L=1 L=2 L=3 Non-fading c) CH 3 d) MR a) CH 1 b) CH 2 No MR Using MR Using MR No MR No MR Using MR Using MR Fig. 3. A verage CHs transmission power in (3) versus the number of stopping points ( K ), parametrized on the number of CHs that use the MR as a relay ( L ) with P ref = 1 µ W , and α = 2 . G 2 ( p ( t n +1 )) are independent of the MR movement direction and we take φ n = φ , ∀ n in (13). In Fig. 3, we show the mean MR and CHs transmit power (after ex ecuting the MD A) for different values of L compared to the non − f ading case 4 . Clearly , as expected, as the number K of stopping points increases, the MR’ s probability of finding a stopping point with a large channel gain also increases. As a result, the CHs transmit po wer decreases. Regarding the number of links L considered by the MR during the MDA execution we observe that the MR transmit power increases when L increases (see Fig. 3 sub-figure d). This is expected as an increase in L will cause the MR to consider a larger number of communication links. Hence, decreasing the degree of freedom to obtaining simultaneously large channel gains for both itself and the L CHs. Interesting, in Fig. 3 (i.e., sub-figure a)), we can observe that when the MD A is used, the CH1 transmit power is lower than the non − f ading case when the number of stopping points K is larger than 4 and for L = 2 and L = 3 . This is due to the fact that the MD A takes advantage of the fading to improv e the channel gain. Now , to further validate our results, in Fig. 4 we observe the CH selection probability (by the MR) for L = 1 and L = 2 (when L = 3 all CHs are selected). Clearly , there is a correlation between the selected CHs (i.e., the L CHs with the lowest channel gain) and the corresponding selection probability . For example, CH1 (experiencing the worst com- 4 In the non − f ading case, the pathloss only communication channel is considered and the MR is located at its initial point as in Fig. 2. munication channel) has a higher selection probability than CH2 and CH3. Furthermore, we can observe an increase in selection probability for all CH as L increases. This is as expected since an increase in L also increases the opportunity of a particular CH to use the MR as a relay in improving its communication link. Therefore as L increases each CH will hav e a higher opportunity to benefit from the MDA. This is why the transmit power for the CHs decreases as L increases (see Fig. 3). 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Probablity of selection 1 1.5 2 2.5 3 CH j L=2 L=1 Fig. 4. CH’ s selection probability to use the MR as a relay versus the CH ( j ), parametrized on the number of CHs that use the MR as a relay ( L ) with P ref = 1 µ W , and α = 2 . V . C O N C L U S I O N S In this paper , we propose an efficient multipl e − l ink MDA to balance the CHs ener gy and e xtend their operational lifetime in random clustered WSNs. W e hav e shown how by using an MR as a relay with the proposed MD A, the CH’ s mean transmit po wer can be significantly reduced. Finally , we hav e also shown that the proposed MD A results in a lower CH’ s transmit power compared to the non-fading communication channel case. Future work will inv estigate the analysis of the problem for fully distributed solution (i.e., where there is no FC). R E F E R E N C E S [1] C-Y Chong, SP Kumar , “Sensor networks: e volution, opportu- nities, and challenges, ” in Pr oc. IEEE. , vol. 91, no.8, pp.1247- 1256, Aug. 2003. [2] I. Akyildiz, W . Su, Y . Sankarasubramanian, E. Cayirci, “ A sur- ve y on sensor networks”, in IEEE Communications Magazine , vol. 40, no.8, pp. 102-114, Nov . 2002. [3] S. Barbarossa, S. Sardellitti, and P . Di Lorenzo, “ Distributed Detection and Estimation in W ireless Sensor Networks , ” In Rama Chellappa and Sergios Theodoridis eds., Academic Press Library in Signal Processing, vol. 2, Communications and Radar Signal Processing, pp. 329-408, 2014. [4] E. Nurellari, D. McLernon, and M. Ghogho, “ A Secure Optimum Distributed Detection Scheme in Under-Attack W ireless Sensor Networks, ” in IEEE T ransactions on Signal and Information Pr ocessing over Networks, v ol. 4, no. 2 , pp. 325-337, Jun. 2018. [5] R. Niu, P . K. V arshney , “Distributed detection and fusion in a large wireless sensor network of random size, ” in EURASIP Journal on W ireless Communication and Networking, vol. 2005(4), pp. 462-472, 2005. [6] E. Nurellari, D. McLernon, M. Ghogho, and S. Aldalahmeh, “Distributed Binary Event Detection Under Data-Falsification and Energy-Bandwidth Limitation, ” in IEEE Sensors Journal, vol. 16, no. 16 , pp. 6298-6309, Aug. 2016. [7] S. Kar and P . K. V arshne y , “ A decentralized framework for linear coherent estimation with spatial collaboration, ” Proc. ICASSP , Florence, Italy , 4-9 May . 2014. [8] M. Fanaei, M. C. V alenti, A. Jamalipour , and N. A. Schmid, “Optimal power allocation for distributed blue estimation with linear spatial collaboration, ” Pr oc. ICASSP , Florence, Italy , 4-9 May 2014. [9] E. Nurellari, D. McLernon, and M. Ghogho, “Distributed T wo- Step Quantized Fusion Rules via Consensus Algorithm for Distributed Detection in W ireless Sensor Networks, ” in IEEE T ransactions on Signal and Information Pr ocessing over Net- works, vol. 2, no. 3, pp. 321-335, Sept. 2016. [10] A.A. Abbasi and M. Y ounis, “ A survey on clustering algorithms for wireless sensor networks, ” in Computer Networks , vol. 30(14), pp. 2826-2841, 2007. [11] D. W ei, Y . Jin, S. V ural, K. Moessner and R. T afazolli, “ An Energy-Ef ficient Clustering Solution for W ireless Sensor Net- works, ” in IEEE T ransactions on W ireless Communications , vol. 10, no. 11, pp. 3973-3983, Nov . 2011. [12] J.T . Meng, J.R. Y uan, S.-Z. Feng, Y .J W ei, “ An Energy Ef ficient Clustering Scheme for Data Aggreg ation in W ireless Sensor Networks, ” in Journal of Computer Science and T echnology , vol. 28, no. 3, pp. 564-573, May 2013. [13] S. Aldalahmeh, M. Ghogho, D. McLernon, and E. Nurellari, “Optimal fusion rule for distributed detection in clustered wire- less sensor networks”, EURASIP Journal on Advances in Signal Pr ocess. , 2016:5, Jan. 2016. [14] X. Zhu, J. Li, X. Gao, F . Wu, G. Chen and A. V . V asilakos, “ A Distributed Approximation for Multi-Hop Clustering Problem in W ireless Sensor Networks, ” in IEEE Global Communications Confer ence (GLOBECOM) , San Diego, CA, pp. 1-6, 2015. [15] O. Y ounis and S. Fahmy , “Heed: a hybrid, ener gy-efficient, distributed clustering approach for ad hoc sensor networks, ” in IEEE T ransactions on Mobile Computing , vol. 3, no. 4, pp. 366- 379, 2004. [16] D. B. Licea, D. McLernon and M. Ghogho, “Mobile Robot Path Planners W ith Memory for Mobility Di versity Algorithms, ” in IEEE T ransactions on Robotics , vol. 33, no. 2, pp. 419-431, Apr . 2017. [17] D. Bonilla Licea, M. Ghogho, D. McLernon and S. A. R. Zaidi, “Mobility Di versity-Assisted W ireless Communication for Mobile Robots, ” in IEEE T ransactions on Robotics , vol. 32, no. 1, pp. 214-229, Feb . 2016.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment