생체 영감 센서 네트워크를 이용한 환경 토폴로지 매핑
본 논문은 코크로치의 이동 특성을 모방한 저비용 모바일 센서 노드들의 약한 접촉 정보를 활용해, 좌표 없이 환경의 위상 구조를 추정한다. encounter metric을 정의하고, 밀도 기반 서브샘플링과 지속성 동형론(persistent homology)을 결합해 영구적 구멍·연결성 등 주요 위상 특징을 추출한다. 또한, persistence diagram을 정량적으로 분류하는 스케일 불변 알고리즘을 제안하여 잡음과 이상치에 강인한 매핑을 구현…
저자: Alireza Dirafzoon, Edgar Lobaton
본 논문은 “생체 영감 센서 네트워크를 이용한 환경 토폴로지 매핑”이라는 제목 아래, 제한된 센싱 능력을 가진 모바일 로봇 군집이 어떻게 좌표 정보를 사용하지 않고도 환경의 위상 구조를 파악할 수 있는지를 체계적으로 제시한다. 연구 배경으로는 재난 현장 등에서 전통적인 SLAM이 요구하는 정확한 위치 추정이 불가능하거나 비용이 과도하게 드는 상황을 들며, 이러한 제약 하에서 위상 데이터 분석(TDA)이 강력한 대안이 될 수 있음을 강조한다.
첫 번째 단계는 로봇(노드)의 이동 모델을 정의하는 것이다. 저자들은 코크로치의 행동을 모방한 확률적 모델을 채택한다. 로봇은 크게 무작위 보행(RW), 벽을 따라 이동(WF), 그리고 정지(S) 세 가지 상태를 전이한다. 각 상태 전이는 지수분포를 따르는 평균 시간 파라미터(τ_stop, τ_exit 등)와 확률(p_sh)로 기술되며, 이동 속도(v_c, v_p)와 평균 직선 구간 길이(l*)가 정의된다. 이러한 모델은 실제 곤충이 경계에 부딪히면 벽을 따라 이동하고, 일정 시간 후 다시 중앙으로 돌아가는 행동을 수학적으로 재현한다.
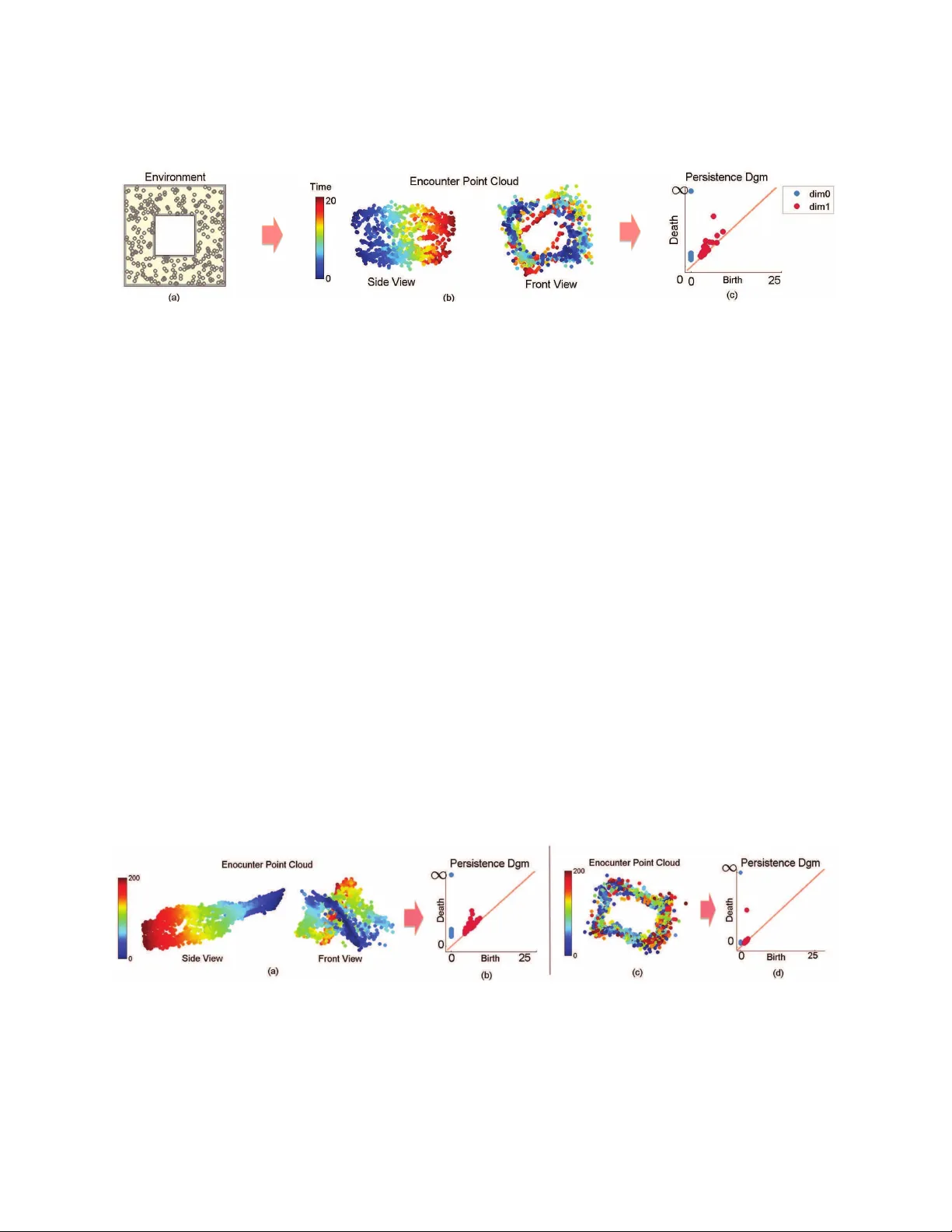
두 번째 단계는 센싱 및 통신 모델이다. 각 노드는 반경 r_d 내에 있는 다른 노드와 경계만을 감지할 수 있으며, 감지 시 자신의 ID와 상대방 ID, 감지 시각을 베이스 스테이션에 전송한다. 좌표 자체는 전송되지 않으며, 오직 ‘접촉(encounter)’ 정보만이 제공된다.
세 번째 단계는 접촉 데이터를 이용한 거리 메트릭(Encounter Metric) 구축이다. 접촉 이벤트 E_i =
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기